
Cascade Adaptive MPC with Type 2 Fuzzy System for Safety and Energy Management in Autonomous Vehicles: A Sustainable Approach for Future of Transportation


 ,
,  ,
, 
Abstract
:1. Introduction
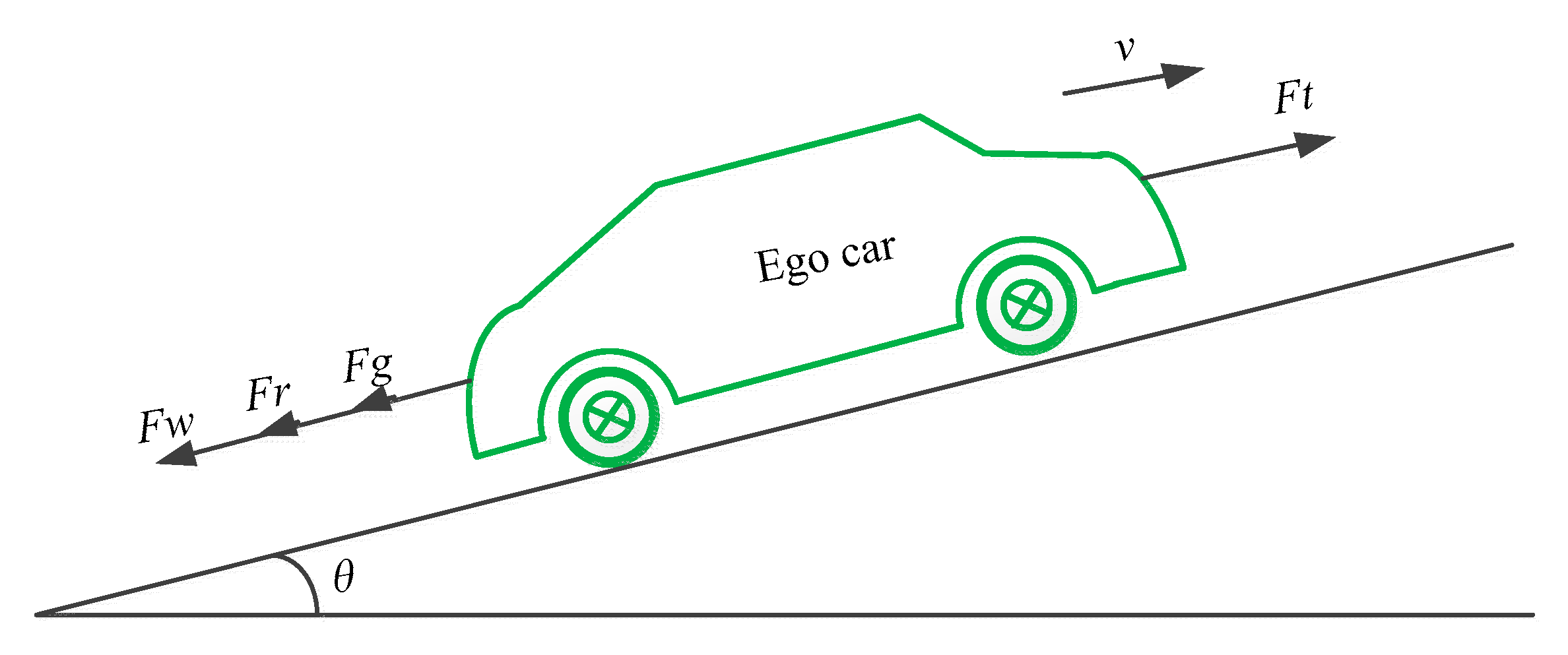
2. Vehicle Dynamics and Require Power
3. Proposed Control System for the Ego Vehicle
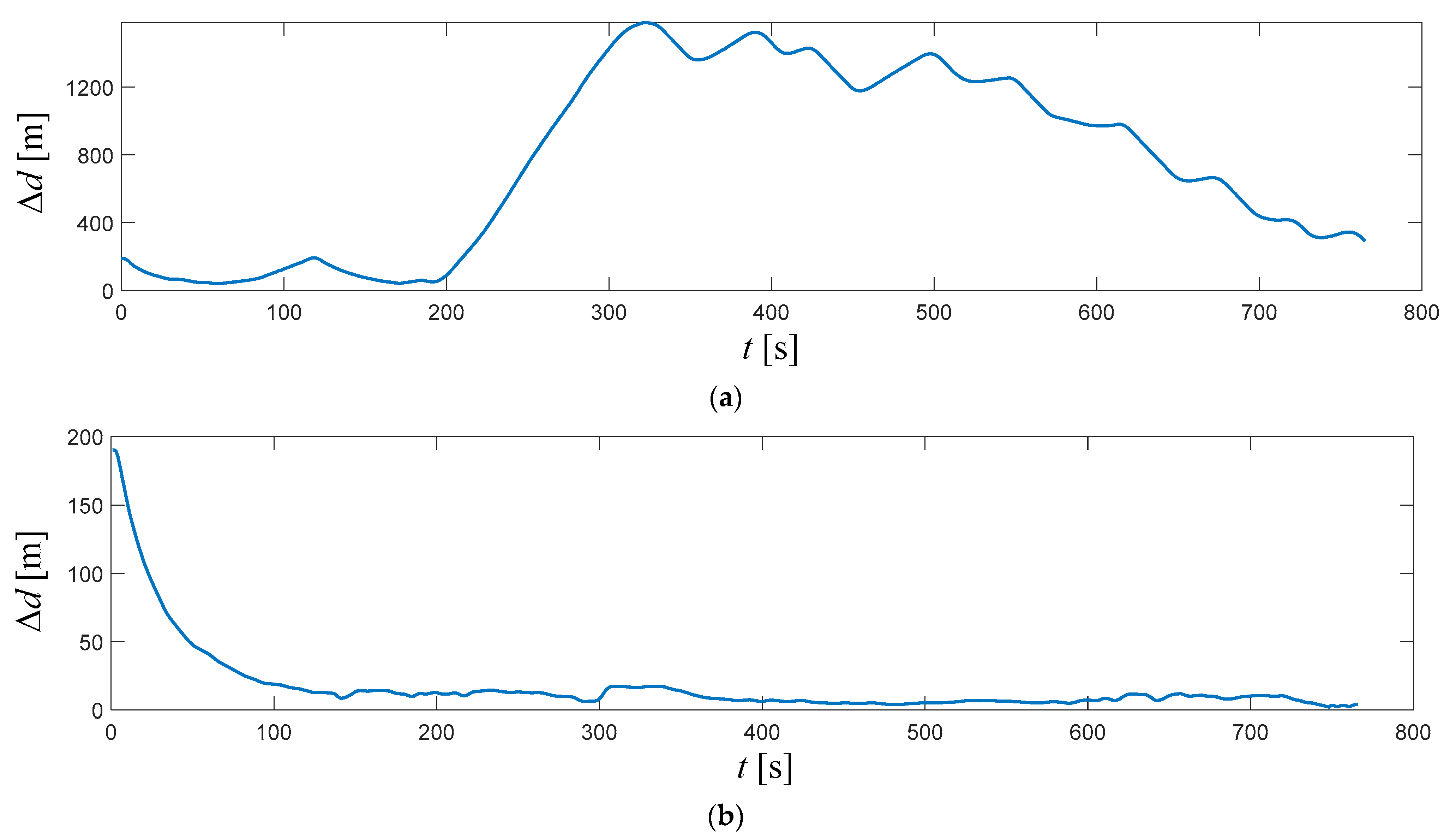
- The spacing error between two vehicles, i.e., is always maintained greater than zero, where d and dsafe are the actual and safe distances between the lead and ego vehicles, respectively.
- The energy consumption for the ego vehicle is optimized using an EMS.
3.1. Adaptive Cruise Control
3.2. Energy Management System
3.2.1. Fuzzy Logic System
Part I. Type 1 Fuzzy Logic System
Part II. Interval Type 2 Fuzzy Logic System
3.2.2. PID Controller
4. Simulations and Discussion
4.1. Simulations
4.2. Discussion
4.2.1. Safety
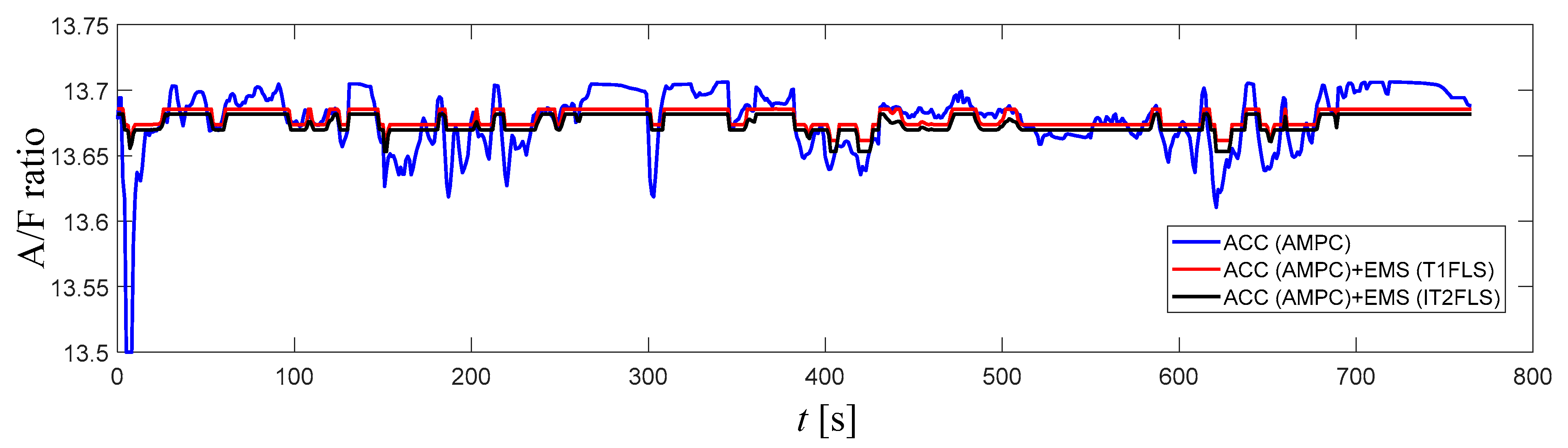
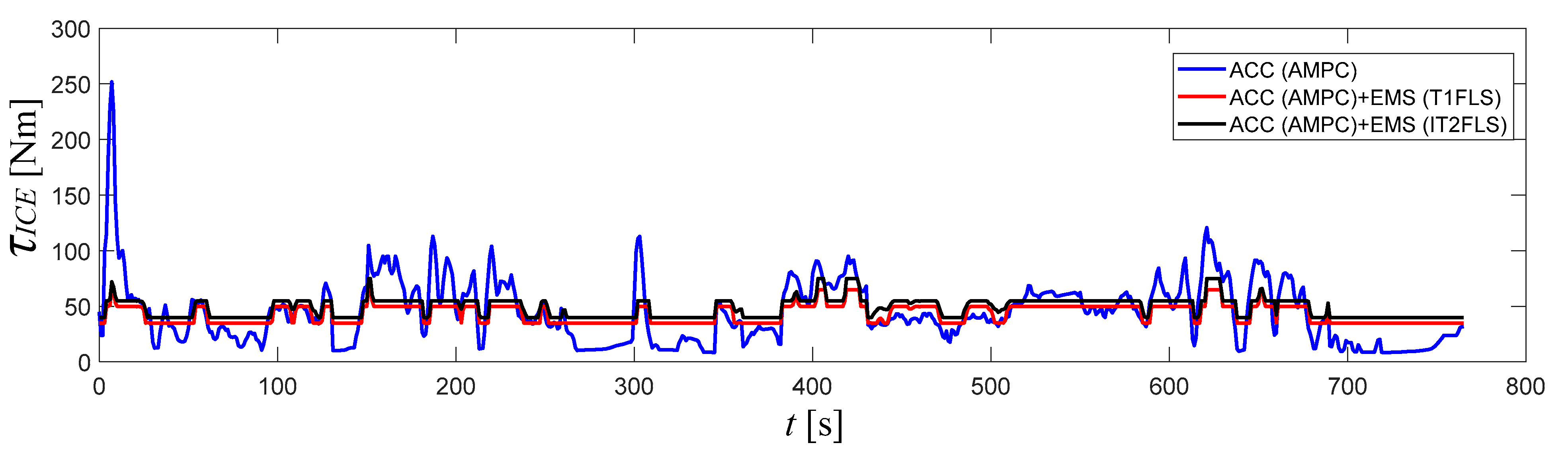
4.2.2. Fuel Economy
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- The Sustainable Development Goals Report; United Nations: New York, NY, USA, 2019.
- Tracking Transport 2020; International Energy Agency: Paris, France, 2020.
- Khayyam, H.; Naebe, M.; Milani, A.S.; Fakhrhoseini, S.M.; Date, A.; Shabani, B.; Atkiss, S.; Ramakrishna, S.; Fox, B.; Jazar, R.N. Improving energy efficiency of carbon fiber manufacturing through waste heat recovery: A circular economy approach with machine learning. Energy 2021, 225, 120113. [Google Scholar] [CrossRef]
- Cugurullo, F.; Acheampong, R.A.; Gueriau, M.; Dusparic, I. The transition to autonomous cars, the redesign of cities and the future of urban sustainability. Urban Geogr. 2020, 1–27. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Cugurullo, F.; Gueriau, M.; Dusparic, I. Can autonomous vehicles enable sustainable mobility in future cities? Insights and policy challenges from user preferences over different urban transport options. Cities 2021, 112, 103134. [Google Scholar] [CrossRef]
- Xie, J.; Xu, X.; Wang, F.; Tang, Z.; Chen, L. Coordinated control based path following of distributed drive autonomous electric vehicles with yaw-moment control. Control. Eng. Pract. 2021, 106, 104659. [Google Scholar] [CrossRef]
- Khayyam, H.; Javadi, B.; Jalili, M.; Jazar, R.N. Artificial Intelligence and Internet of Things for Autonomous Vehicles. In Nonlinear Approaches in Engineering Applications; Springer: Basingstoke, UK, 2020; pp. 39–68. [Google Scholar] [CrossRef]
- Marzbani, H.; Khayyam, H.; To, C.N.; Quoc, D.V.; Jazar, R.N. Autonomous Vehicles: Autodriver Algorithm and Vehicle Dynamics. IEEE Trans. Veh. Technol. 2019, 68, 3201–3211. [Google Scholar] [CrossRef]
- Lanctot, R. Accelerating the future: The economic impact of the emerging passenger economy. Strategy Anal. 2017, 5. [Google Scholar]
- Noh, S. Decision-Making Framework for Autonomous Driving at Road Intersections: Safeguarding Against Collision, Overly Conservative Behavior, and Violation Vehicles. IEEE Trans. Ind. Electron. 2018, 66, 3275–3286. [Google Scholar] [CrossRef]
- Duraisamy, B.; Schwarz, T.; Wöhler, C. Track level fusion algorithms for automotive safety applications. In Proceedings of the 2013 International Conference on Signal Processing, Image Processing & Pattern Recognition, Innsbruck, Australia, 12–14 February 2013; pp. 179–184. [Google Scholar]
- Milanes, V.; Villagra, J.; Godoy, J.; Gonzalez, C. Comparing Fuzzy and Intelligent PI Controllers in Stop-and-Go Manoeuvres. IEEE Trans. Control. Syst. Technol. 2011, 20, 770–778. [Google Scholar] [CrossRef]
- Khayyam, H.; Nahavandi, S.; Davis, S. Adaptive cruise control look-ahead system for energy management of vehicles. Expert Syst. Appl. 2012, 39, 3874–3885. [Google Scholar] [CrossRef]
- Liang, Z.; Ren, Z.; Shao, X. Decoupling trajectory tracking for gliding reentry vehicles. IEEE/CAA J. Autom. Sin. 2015, 2, 115–120. [Google Scholar] [CrossRef]
- Lin, C.-M.; Chen, C.-H. Car-Following Control Using Recurrent Cerebellar Model Articulation Controller. IEEE Trans. Veh. Technol. 2007, 56, 3660–3673. [Google Scholar] [CrossRef]
- Bageshwar, V.; Garrard, W.; Rajamani, R. Model Predictive Control of Transitional Maneuvers for Adaptive Cruise Control Vehicles. IEEE Trans. Veh. Technol. 2004, 53, 1573–1585. [Google Scholar] [CrossRef]
- Magdici, S.; Althoff, M. Adaptive Cruise Control with Safety Guarantees for Autonomous Vehicles. IFAC-PapersOnLine 2017, 50, 5774–5781. [Google Scholar] [CrossRef]
- Takahama, T.; Akasaka, D. Model Predictive Control Approach to Design Practical Adaptive Cruise Control for Traffic Jam. Int. J. Automot. Eng. 2018, 9, 99–104. [Google Scholar] [CrossRef] [Green Version]
- Mahdinia, I.; Arvin, R.; Khattak, A.J.; Ghiasi, A. Safety, Energy, and Emissions Impacts of Adaptive Cruise Control and Cooperative Adaptive Cruise Control. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 253–267. [Google Scholar] [CrossRef]
- Shladover, S.E.; Nowakowski, C.; Lu, X.-Y.; Ferlis, R. Cooperative adaptive cruise control: Definitions and operating concepts. Transp. Res. Record 2015, 2489, 145–152. [Google Scholar] [CrossRef]
- Kural, E.; Güvenç, B.A. Model Predictive Adaptive Cruise Control. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Cordoba, Spain, 1–4 June 2010; pp. 1455–1461. [Google Scholar]
- De Madrid, A.P.; Mañoso, C.; Romero, M. Fundamentals of the MPC approach to stop-and-go Adaptive Cruise Control. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, Singapore, 10–12 December 2014; pp. 175–180. [Google Scholar]
- Weißmann, A.; Görges, D.; Lin, X. Energy-Optimal Adaptive Cruise Control based on Model Predictive Control. IFAC-PapersOnLine 2017, 50, 12563–12568. [Google Scholar] [CrossRef]
- Miftakhudin, M.I.; Subiantoro, A.; Yusivar, F. Adaptive Cruise Control by Considering Control Decision as Multistage MPC Constraints. In Proceedings of the 2019 IEEE Conference on Energy Conversion (CENCON), Yogyakarta, Indonesia, 16–17 December 2019; pp. 171–176. [Google Scholar]
- Bujarbaruah, M.; Zhang, X.; Borrelli, F. Adaptive MPC for Autonomous Lane Keeping. In Proceedings of the 14th International Symposium on Advanced Vehicle Control (AVEC), Beijing, China, 16–20 July 2018. [Google Scholar]
- Wang, X.; Guo, L.; Jia, Y. Road Condition Based Adaptive Model Predictive Control for Autonomous Vehicles. In Proceedings of the Dynamic Systems and Control Conference (DSCC), Atlanta, GA, USA, 30 September–3 October 2018. [Google Scholar]
- Khayyam, H. Automation, Control and Energy Efficiency in Complex Systems; MDPI Books: Belgrade, Switzerland, 2020; p. 245. [Google Scholar]
- Koot, M.; Kessels, J.J.; De Jager, A.B.; Bosch, P.P.V.D. Fuel reduction potential of energy management for vehicular electric power systems. Int. J. Altern. Propuls. 2006, 1, 112. [Google Scholar] [CrossRef]
- Khayyam, H.; Kouzani, A.Z.; Khoshmanesh, K.; Hu, E.J. A.Z.; Khoshmanesh, K.; Hu, E.J. A rule-based intelligent energy management system for an internal combustion engine vehicle. In TENCON 2008-2008 IEEE Region 10 Conference; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; pp. 1–5. [Google Scholar]
- Khayyam, H.; Kouzani, A.Z.; Hu, E.J.; Nahavandi, S. Coordinated energy management of vehicle air conditioning system. Appl. Therm. Eng. 2011, 31, 750–764. [Google Scholar] [CrossRef]
- Phan, D.; Bab-Hadiashar, A.; Lai, C.Y.; Crawford, B.; Hoseinnezhad, R.; Jazar, R.N.; Khayyam, H. Intelligent energy management system for conventional autonomous vehicles. Energy 2020, 191, 116476. [Google Scholar] [CrossRef]
- Won, J.-S.; Langari, R. Intelligent Energy Management Agent for a Parallel Hybrid Vehicle—Part II: Torque Distribution, Charge Sustenance Strategies, and Performance Results. IEEE Trans. Veh. Technol. 2005, 54, 935–953. [Google Scholar] [CrossRef]
- Khayyam, H.; Nahavandi, S.; Hu, E.; Kouzani, A.; Chonka, A.; Abawajy, J.; Marano, V.; Davis, S. Intelligent energy management control of vehicle air conditioning via look-ahead system. Appl. Therm. Eng. 2011, 31, 3147–3160. [Google Scholar] [CrossRef]
- Marano, V.; Rizzoni, G.; Tulpule, P.; Gong, Q.; Khayyam, H. Intelligent energy management for plug-in hybrid electric vehicles: The role of ITS infrastructure in vehicle electrification. Oil Gas Sci. Technol. Rev. d’IFP Energies Nouv. 2012, 67, 575–587. [Google Scholar] [CrossRef] [Green Version]
- Phan, D.; Bab-Hadiashar, A.; Hoseinnezhad, R.; Jazar, R.N.; Date, A.; Jamali, A.; Pham, D.B.; Khayyam, H. Neuro-Fuzzy System for Energy Management of Conventional Autonomous Vehicles. Energies 2020, 13, 1745. [Google Scholar] [CrossRef] [Green Version]
- Naranjo, J.E.; Sotelo, M.A.; Gonzalez, C.; Garcia, R.; De Pedro, T. Using Fuzzy Logic in Automated Vehicle Control. IEEE Intell. Syst. 2007, 22, 36–45. [Google Scholar] [CrossRef]
- Tan, W.W.; Chua, T.W. Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions. IEEE Comput. Intell. Mag. 2007, 2, 72–73. [Google Scholar] [CrossRef]
- John, R. Type 2 Fuzzy Sets: An Appraisal of Theory and Applications. Int. J. Uncertain. Fuzziness Knowl. Based Syst. 1998, 6, 563–576. [Google Scholar] [CrossRef]
- Bi, Y.; Lu, X.; Sun, Z.; Srinivasan, D.; Sun, Z. Optimal Type-2 Fuzzy System for Arterial Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2017, 19, 3009–3027. [Google Scholar] [CrossRef]
- Vaezipour, A.; Rakotonirainy, A.; Haworth, N. Reviewing In-vehicle Systems to Improve Fuel Efficiency and Road Safety. Procedia Manuf. 2015, 3, 3192–3199. [Google Scholar] [CrossRef]
- Khooban, M.-H.; Gheisarnejad, M.; Vafamand, N.; Boudjadar, J. Electric Vehicle Power Propulsion System Control Based on Time-Varying Fractional Calculus: Implementation and Experimental Results. IEEE Trans. Intell. Veh. 2019, 4, 255–264. [Google Scholar] [CrossRef]
- Phan, D.; Bab-Hadiashar, A.; Fayyazi, M.; Hoseinnezhad, R.; Jazar, R.N.; Khayyam, H. Interval Type 2 Fuzzy Logic Control for Energy Management of Hybrid Electric Autonomous Vehicles. IEEE Trans. Intell. Veh. 2021, 6, 210–220. [Google Scholar] [CrossRef]
- Khayyam, H. Adaptive intelligent control of vehicle air conditioning system. Appl. Therm. Eng. 2013, 51, 1154–1161. [Google Scholar] [CrossRef]
- A Lambert, M.; Jones, B.J. Automotive Adsorption Air Conditioner Powered by Exhaust Heat. Part 1: Conceptual and Embodiment Design. Proc. Inst. Mech. Eng. Part D 2006, 220, 959–972. [Google Scholar] [CrossRef]
- Cho, D.-I.; Hedrick, J.K. Automotive Powertrain Modeling for Control. J. Dyn. Syst. Meas. Control. 1989, 111, 568–576. [Google Scholar] [CrossRef]
- Michael, P.; Anthony, M. Engine Testing Theory and Practice; SAE International: Warrendale, PA, USA, 1999. [Google Scholar]
- Rajamani, R.; Zhu, C. Semi-autonomous adaptive cruise control systems. IEEE Trans. Veh. Technol. 2002, 51, 1186–1192. [Google Scholar] [CrossRef]
- Khayyam, H. Stochastic Models of Road Geometry and Wind Condition for Vehicle Energy Management and Control. IEEE Trans. Veh. Technol. 2012, 62, 61–68. [Google Scholar] [CrossRef]
- Liang, Q.; Mendel, J.M. Interval type-2 fuzzy logic systems: Theory and design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef] [Green Version]
- Mendel, J.M.; Liu, X. Simplified Interval Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2013, 21, 1056–1069. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M.; Liang, Q. Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 1999, 7, 643–658. [Google Scholar] [CrossRef] [Green Version]
- Mendel, J.; Karnik, N.; Liang, Q. Connection admission control in ATM networks using survey-based type-2 fuzzy logic systems. IEEE Trans. Syst. Man Cybern. Part C 2000, 30, 329–339. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M.; Ricker, N.L. Model Predictive Control Toolbox User’s Guide; The Mathworks: Portola Valley, CA, USA, 2010. [Google Scholar]
- Taskin, A.; Kumbasar, T. An open source Matlab/Simulink toolbox for interval type-2 fuzzy logic systems. In Proceedings of the 2015 IEEE Symposium Series on Computational Intelligence, Cape Town, South Africa, 8–10 December 2015; pp. 1561–1568. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| Coefficient of road friction | 0.015 | |
| Gravity acceleration | g | 9.81 [m/s2] |
| Velocity of the vehicle | v | ACC command |
| Mass (vehicle + equivalent rotating parts + passengers) | m | 1280 [kg] |
| Aerodynamic resistance coefficient | 0.335 | |
| A cross-sectional area | ||
| Air density | 1.225 [kg/m3] | |
| Combustion energy | qcombustion | 38,017 [kJ/kg] |
| Condition Number | If Required Power | Then Engine Torque |
|---|---|---|
| 1 | L | LO |
| 2 | LN | O |
| 3 | N | O |
| 4 | NH | O |
| 5 | H | RO |
| ACC | EMS | |
|---|---|---|
| Alternative 1 | AMPC | - |
| Alternative 2 | AMPC | T1FLS |
| Alternative 3 | AMPC | T2FLS |
| Model | Average Efficiency | mfuel (L/100 km) |
|---|---|---|
| ACC (LA) | - | 7.95 |
| ACC (AMPC) | 25.31% | 7.21 |
| ACC (AMPC) + EMS (T1FLS) | 29.00% | 6.88 |
| ACC (AMPC) + EMS (T2FLS) | 29.78% | 6.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, D.; Amani, A.M.; Mola, M.; Rezaei, A.A.; Fayyazi, M.; Jalili, M.; Ba Pham, D.; Langari, R.; Khayyam, H. Cascade Adaptive MPC with Type 2 Fuzzy System for Safety and Energy Management in Autonomous Vehicles: A Sustainable Approach for Future of Transportation. Sustainability 2021, 13, 10113. https://doi.org/10.3390/su131810113
Phan D, Amani AM, Mola M, Rezaei AA, Fayyazi M, Jalili M, Ba Pham D, Langari R, Khayyam H. Cascade Adaptive MPC with Type 2 Fuzzy System for Safety and Energy Management in Autonomous Vehicles: A Sustainable Approach for Future of Transportation. Sustainability. 2021; 13(18):10113. https://doi.org/10.3390/su131810113
Chicago/Turabian StylePhan, Duong, Ali Moradi Amani, Mirhamed Mola, Ahmad Asgharian Rezaei, Mojgan Fayyazi, Mahdi Jalili, Dinh Ba Pham, Reza Langari, and Hamid Khayyam. 2021. "Cascade Adaptive MPC with Type 2 Fuzzy System for Safety and Energy Management in Autonomous Vehicles: A Sustainable Approach for Future of Transportation" Sustainability 13, no. 18: 10113. https://doi.org/10.3390/su131810113
APA StylePhan, D., Amani, A. M., Mola, M., Rezaei, A. A., Fayyazi, M., Jalili, M., Ba Pham, D., Langari, R., & Khayyam, H. (2021). Cascade Adaptive MPC with Type 2 Fuzzy System for Safety and Energy Management in Autonomous Vehicles: A Sustainable Approach for Future of Transportation. Sustainability, 13(18), 10113. https://doi.org/10.3390/su131810113