An Advanced Control Technique for Power Quality Improvement of Grid-Tied Multilevel Inverter

 ,
,  , ,
, ,  , , and
, , and 
Abstract
:1. Introduction
- A robust and dynamic control scheme for a 15-level (15-L) NPC inverter-fed grid-connected system, which is proposed to improve the system performance;
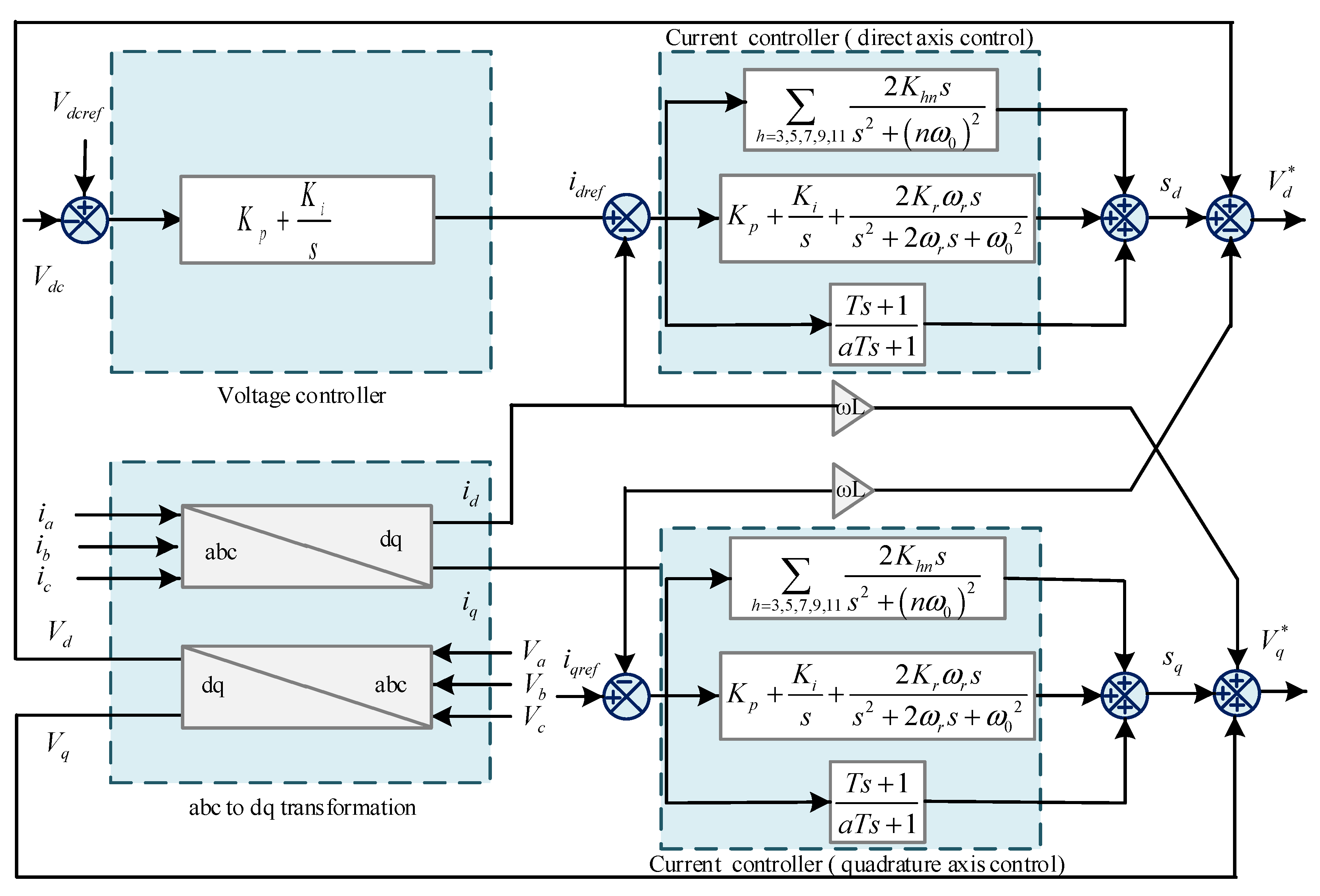
- The control scheme consists of a proportional-integral resonance (PIR) controller with the feedback of a harmonic compensator (HC) and a lead compensator (LC);
- The harmonic compensator decreases the lower order harmonics of grid voltage and current and the lead compensator provides the addition of phase by increasing the system bandwidth;
- Injected power quality, ability to handle sudden load changes, fault-handling capacity, steady-state response, and stability of the system with the proposed control scheme are investigated to validate the auspicious performance of the controller compared with existing solutions.
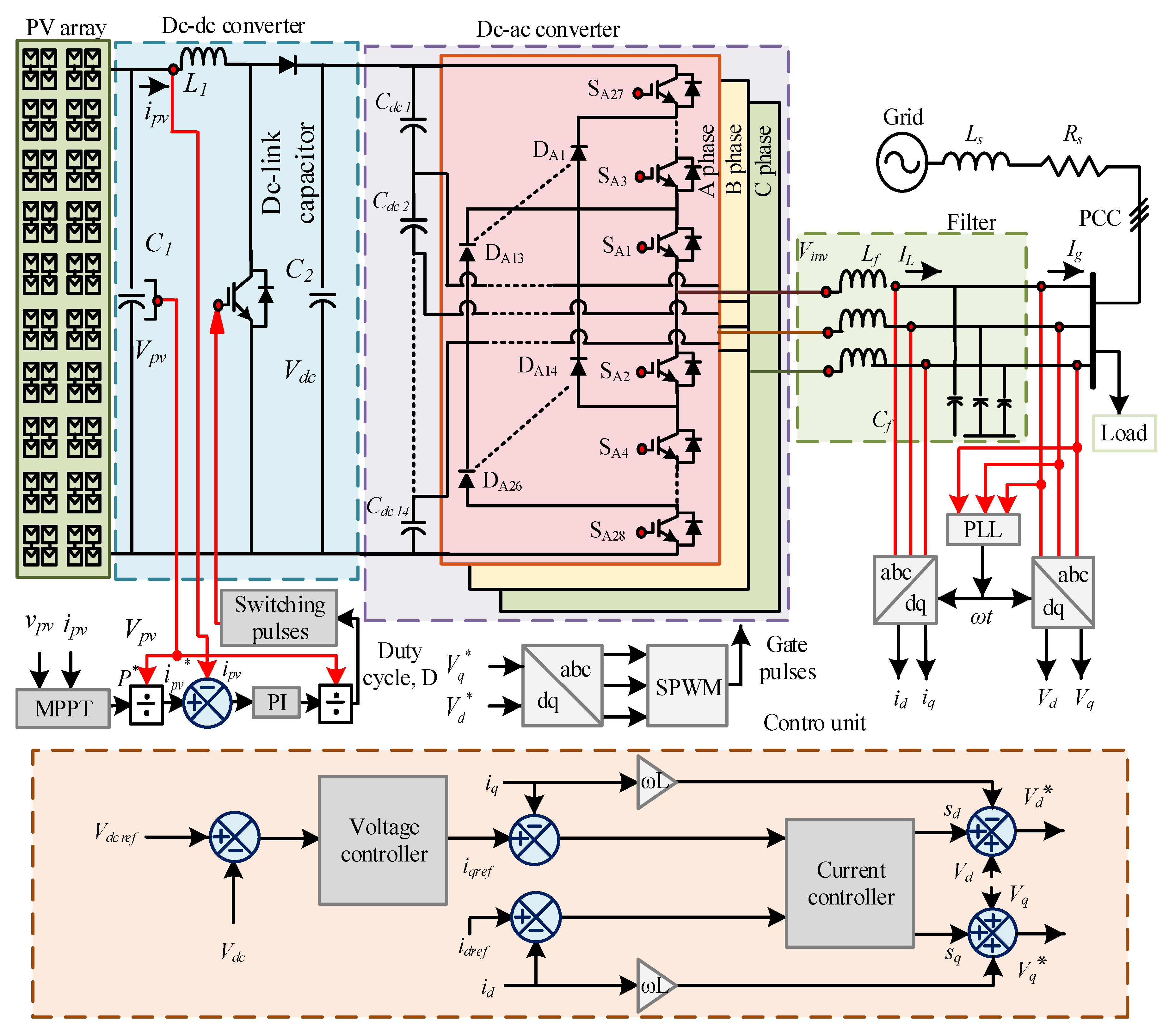
2. System Description and Modelling
2.1. System Specification and Description
2.2. Power Flow Theory
2.3. System Modelling
2.4. Grid Synchronization
3. Proposed Controller
4. Performance Evaluation of the Proposed Controller
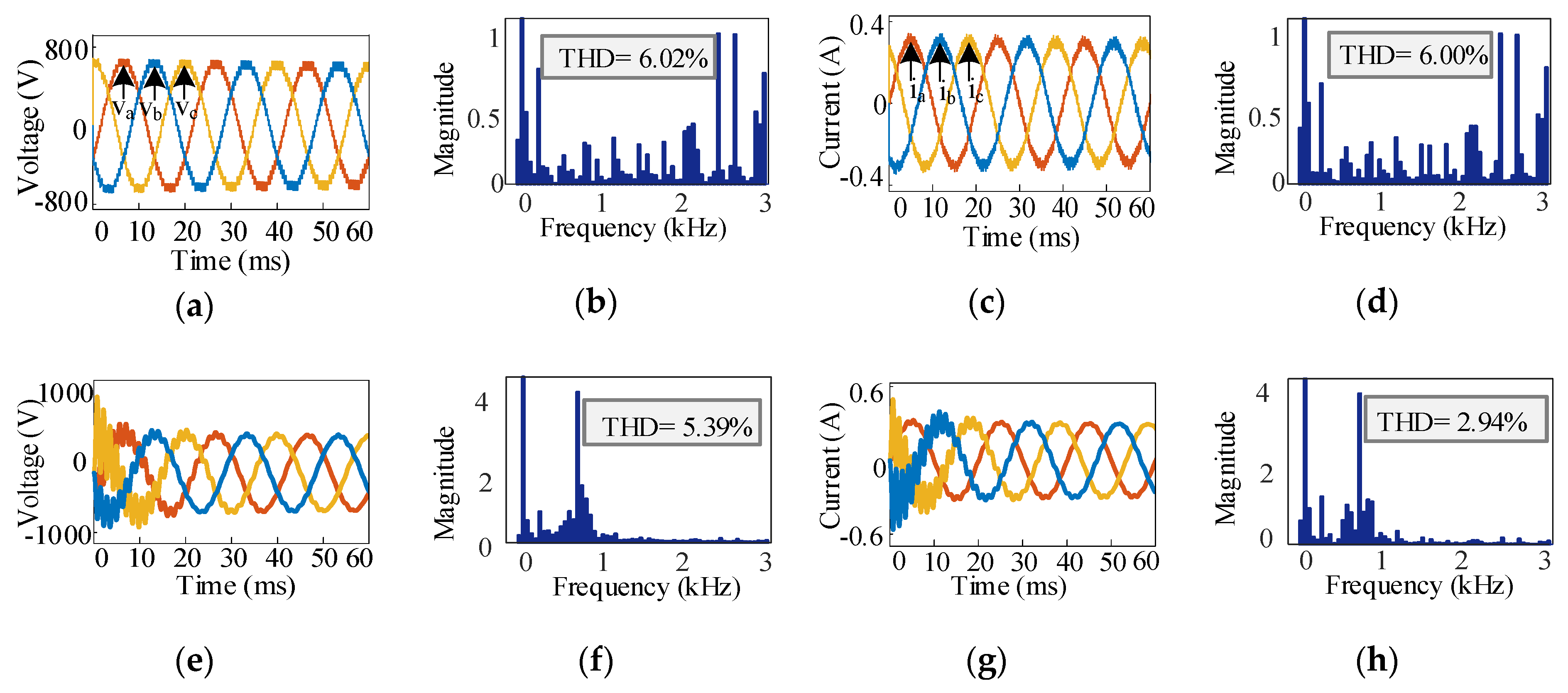
4.1. Inverter Performance
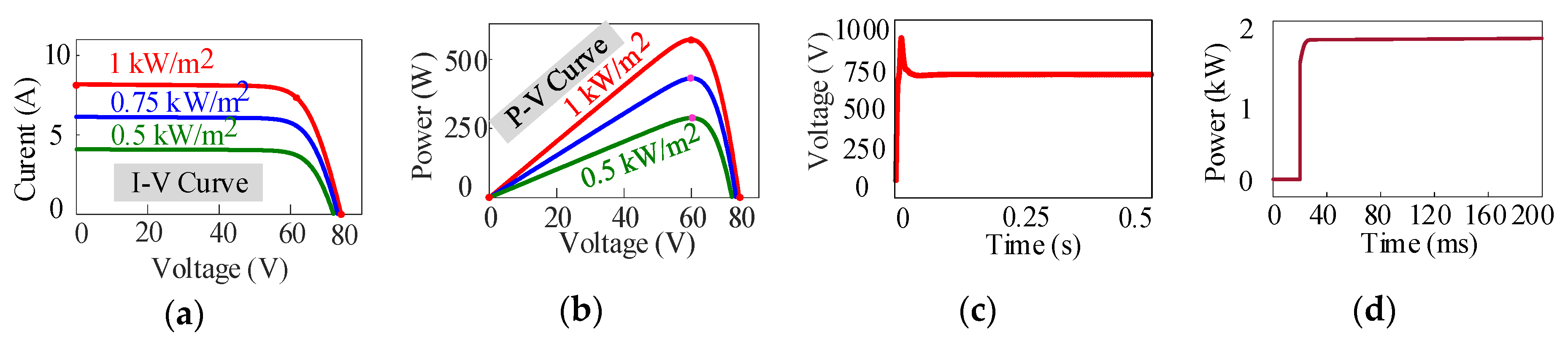
4.2. PV Performance
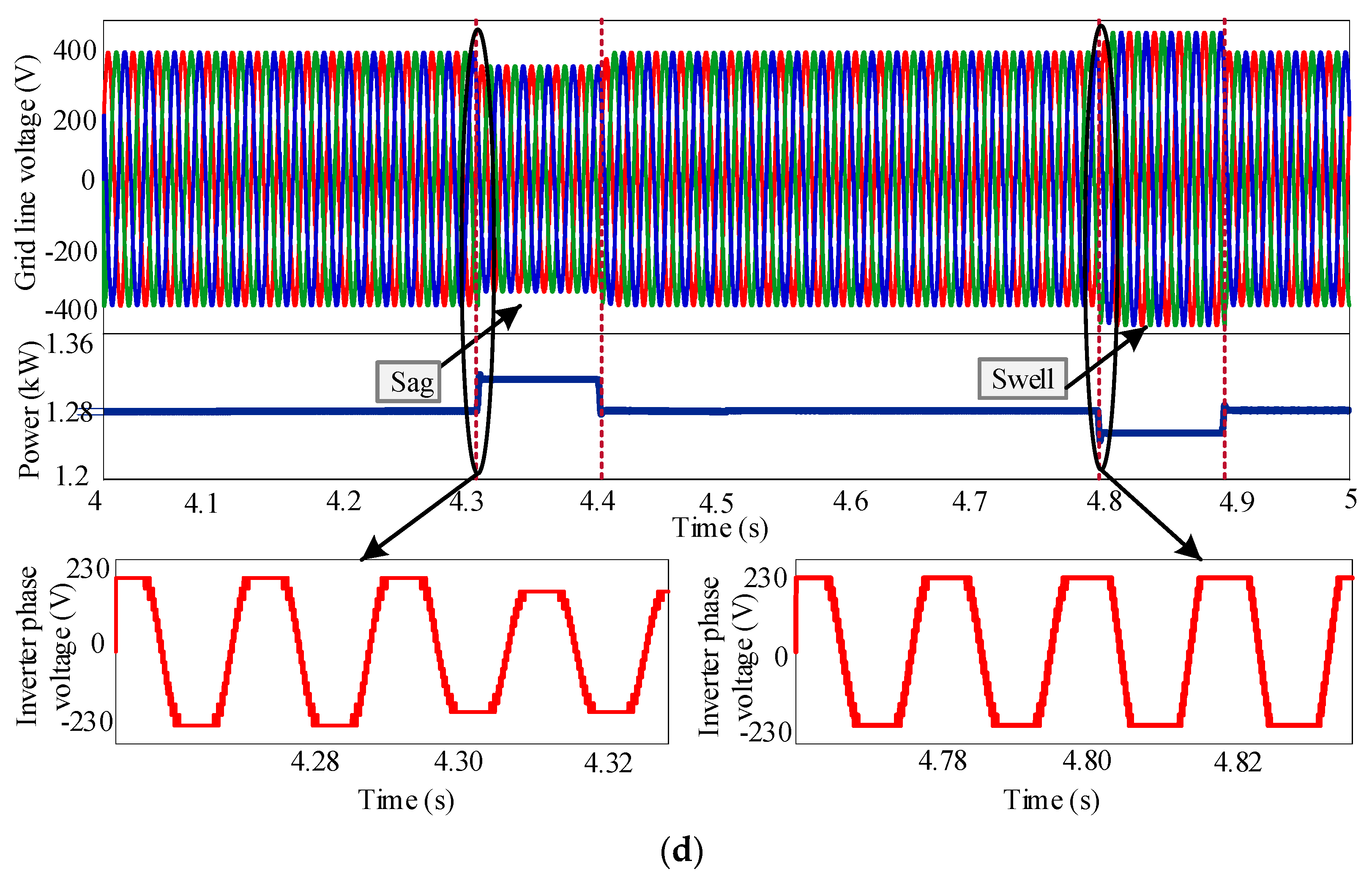
4.3. Grid Performance
4.4. Controller Performance
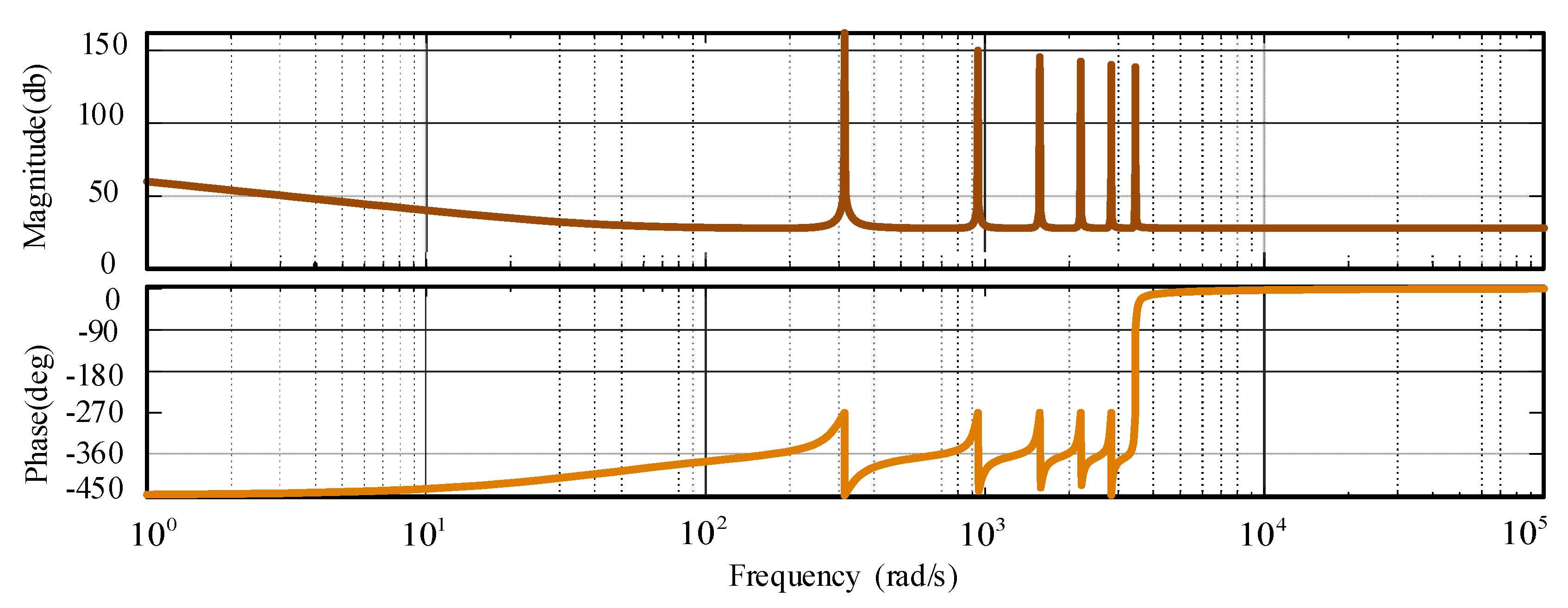
4.4.1. Stability
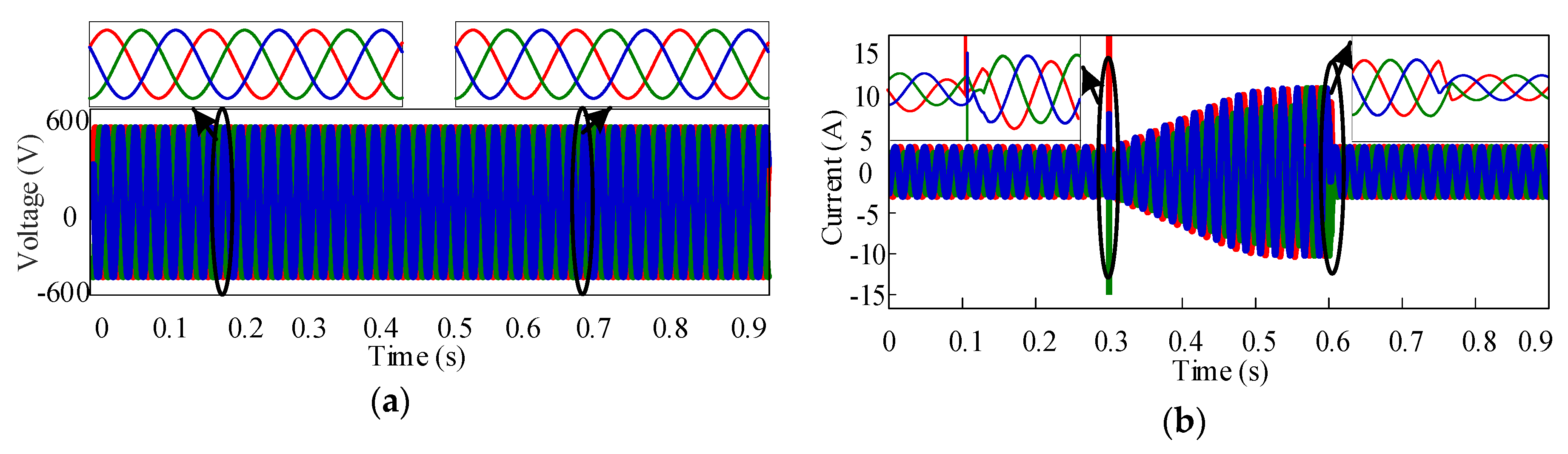
4.4.2. Sudden Load-Change Response of Inverter
4.4.3. Fault Analysis in Grid Current
4.5. Comparative Result Analysis
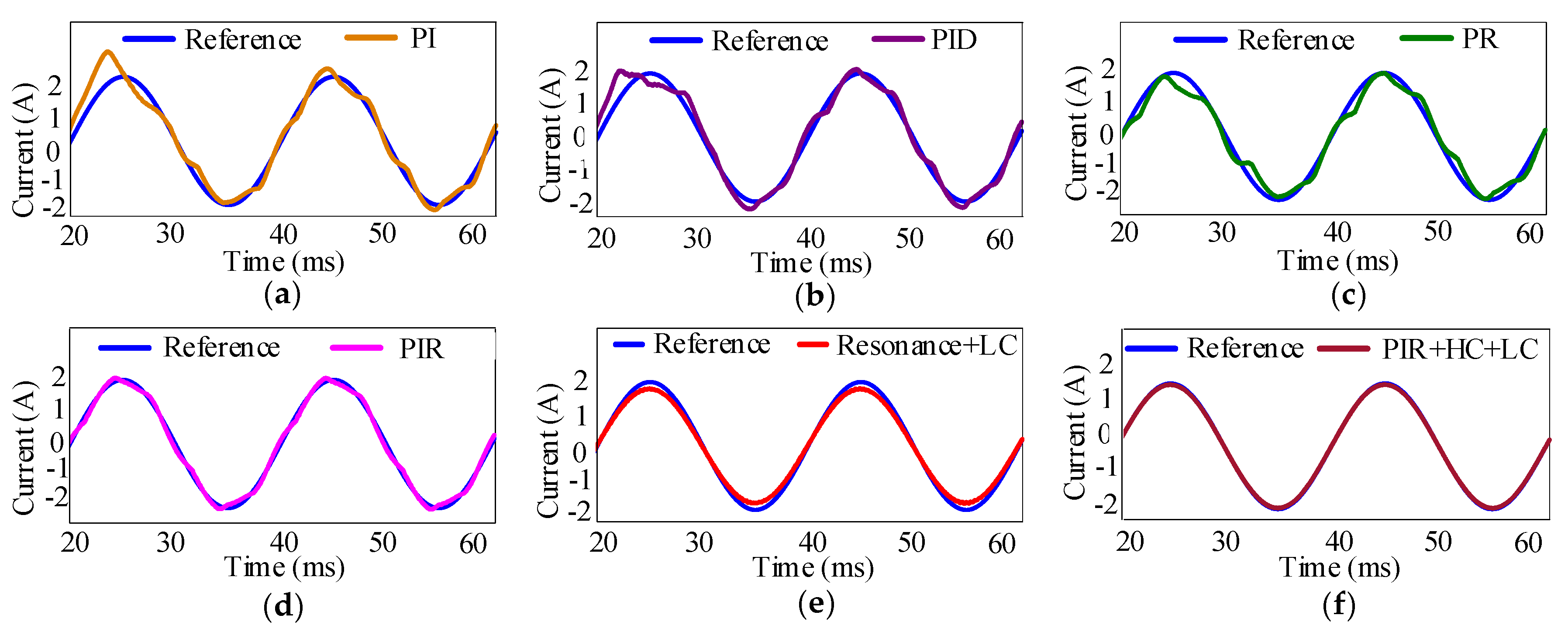
4.5.1. Reference Tracking Capability
4.5.2. Sudden Load-Change Response of Inverter for Different Controllers
4.5.3. THD Analysis
4.5.4. Advantages and Limitations of the Controllers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| NPC | Neutral point clamped |
| THD | Total harmonic distortion |
| LC | Lead compensator |
| HC | Harmonic compensator |
| PLL | Phase-locked loop |
| SPWM | Sinusoidal pulse width modulation |
| MPPT | Maximum power point tracker |
References
- Islam, M.R.; Guo, Y.G.; Zhu, J.G. A high-frequency link multilevel cascaded medium-voltage converter for direct grid integration of renewable energy systems. IEEE Trans. Power Electron. 2013, 29, 4167–4182. [Google Scholar] [CrossRef]
- Mondol, M.H.; Tür, M.R.; Biswas, S.P.; Hosain, M.K.; Shuvo, S.; Hossain, E. Compact Three Phase Multilevel Inverter for Low and Medium Power Photovoltaic Systems. IEEE Access 2020, 8, 60824–60837. [Google Scholar] [CrossRef]
- Islam, M.R.; Guo, Y.G.; Zhu, J.G. A Multilevel Medium-Voltage Inverter for Step-Up-Transformer-Less Grid Connection of Photovoltaic Power Plants. IEEE J. Photovolt. 2014, 4, 881–889. [Google Scholar] [CrossRef]
- Singaravel, M.M.R.; Daniel, S.A. MPPT with single DC–DC converter and inverter for grid-connected hybrid wind-driven PMSG–PV system. IEEE Trans. Ind. Electron. 2015, 62, 4849–4857. [Google Scholar] [CrossRef]
- Rahman, M.A.; Islam, M.R.; Muttaqi, K.M.; Guo, Y.; Zhu, J.; Sutanto, D.; Lei, G. A modified carrier-based advanced modulation technique for improved switching performance of magnetic-linked medium-voltage converters. IEEE Trans. Ind. Appl. 2019, 55, 2088–2098. [Google Scholar] [CrossRef]
- Mondol, M.H.; Uddin, M.S.; Hossain, E.; Biswas, S.P. A Compact and Cost Efficient Multiconverter for Multipurpose Applications. IEEE Access 2020, 8, 86810–86823. [Google Scholar] [CrossRef]
- Haq, S.; Biswas, S.P.; Jahan, S.; Islam, M.R.; Mahmud, M.P.; Kouzani, A.Z. An Advanced Modulation Technique to Improve the Performance of Modular Multilevel Converter. In Proceedings of the 2020 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 16–18 October 2020; pp. 1–2. [Google Scholar]
- Kumar, N.; Saha, T.K.; Dey, J. Sliding-mode control of PWM dual inverter-based grid-connected PV system: Modeling and Performance Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 435–444. [Google Scholar] [CrossRef]
- Das, M.K.; Jana, K.C.; Sinha, A. Performance evaluation of an asymmetrical reduced switched multi-level inverter for a grid-connected PV system. IET Renew. Power Gener. 2017, 12, 252–263. [Google Scholar] [CrossRef]
- Shuvra, M.A.; Chowdhury, B. Distributed dynamic grid support using smart PV inverters during unbalanced grid faults. IET Renew. Power Gener. 2019, 13, 598–608. [Google Scholar] [CrossRef]
- Taghvaie, A.; Haque, M.E.; Saha, S.; Mahmud, M.A. A New step-up switched-capacitor voltage balancing converter for NPC multilevel inverter-based solar PV system. IEEE Access 2020, 8, 83940–83952. [Google Scholar] [CrossRef]
- Biswas, S.P.; Anower, M.S.; Sheikh, M.R.I.; Islam, M.R.; Kouzani, A.Z.; Mahmud, M.A.P. A new modulation technique to improve the performance of three phase inverters. In Proceedings of the 2020 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 16–18 October 2020; pp. 1–2. [Google Scholar]
- Hannan, M.A.; Ghani, Z.A.; Mohamed, A.; Uddin, M.N. Real-Time Testing of a Fuzzy-Logic-Controller-Based Grid-Connected Photovoltaic Inverter System. IEEE Trans. Ind. Appl. 2015, 51, 4775–4784. [Google Scholar] [CrossRef]
- Wang, J.; Mu, X.; Li, Q. Study of Passivity-Based Decoupling Control of T-NPC PV Grid-Connected Inverter. IEEE Trans. Ind. Electron. 2017, 64, 7542–7551. [Google Scholar] [CrossRef]
- Kakosimos, P.; Abu-Rub, H. Predictive control of a grid-tied cascaded full-bridge npc inverter for reducing high-frequency common-mode voltage components. IEEE Trans. Ind. Inform. 2018, 14, 2385–2394. [Google Scholar] [CrossRef]
- Jain, S.; Shadmand, M.B.; Balog, R.S. Decoupled active and reactive power predictive control for PV applications using a grid-tied quasi-Z-source inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1769–1782. [Google Scholar] [CrossRef]
- Han, Y.; Chen, H.; Li, Z.; Yang, P.; Xu, L.; Guerrero, J.M. Stability analysis for the grid-connected single-phase asymmetrical cascaded multilevel inverter with SRF-PI current control under weak grid conditions. IEEE Trans. Power Electron. 2019, 34, 2052–2069. [Google Scholar] [CrossRef]
- Jafarian, H.; Kim, N.; Parkhideh, B. Decentralized control strategy for AC-stacked PV inverter architecture under grid background harmonics. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 84–93. [Google Scholar] [CrossRef]
- Liu, Q.; Caldognetto, T.; Buso, S. Review and comparison of grid-tied inverter controllers in microgrids. IEEE Trans. Power Electron. 2020, 35, 7624–7639. [Google Scholar] [CrossRef]
- Leon, J.I.; Vazquez, S.; Franquelo, L.G. Multilevel converters: Control and modulation techniques for their operation and industrial applications. Proc. IEEE 2017, 105, 2066–2081. [Google Scholar] [CrossRef]
- Jahan, S.; Biswas, S.P.; Haq, S.; Islam, M.R.; Mahmud, M.A.P.; Kouzani, A.Z. A grid feeding voltage source inverter with an advanced control scheme for solar pv system. In Proceedings of the 2020 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 16–18 October 2020; pp. 1–2. [Google Scholar]
- Liu, B.; Su, M.; Yang, J.; Song, D.; He, D.; Song, S. Combined Reactive Power Injection Modulation and Grid Current Distortion Improvement Approach for H6 Transformer-Less Photovoltaic Inverter. IEEE Trans. Energy Convers. 2017, 32, 1456–1467. [Google Scholar] [CrossRef]
- Li, Y.W.; He, J. Distribution system harmonic compensation methods: An overview of DG-interfacing inverters. IEEE Ind. Electron. Mag. 2014, 8, 18–31. [Google Scholar] [CrossRef]
- Bighash, E.Z.; Sadeghzadeh, S.M.; Ebrahimzadeh, E.; Blaabjerg, F. Adaptive-harmonic compensation in residential distribution grid by roof-top PV systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2098–2108. [Google Scholar] [CrossRef]
- Mora, A.; Cárdenas-Dobson, R.; Aguilera, R.P.; Angulo, A.; Donoso, F.; Rodriguez, J. computationally efficient cascaded optimal switching sequence MPC for grid-connected three-level NPC converters. IEEE Trans. Power Electron. 2019, 34, 12464–12475. [Google Scholar] [CrossRef]
- Malakondareddy, B.; Kumar, S.S.; Gounden, N.A.; Anand, I. An adaptive PI control scheme to balance the neutral-point voltage in a solar PV fed grid-connected neutral point clamped inverter. Int. J. Electr. Power Energy Syst. 2019, 110, 318–331. [Google Scholar] [CrossRef]
- Alhosaini, W.; Wu, Y.; Zhao, Y. An enhanced model predictive control using virtual space vectors for grid-connected three-level neutral-point clamped inverters. IEEE Trans. Energy Convers. 2019, 34, 1963–1972. [Google Scholar] [CrossRef]
- Rahman, M.M.; Biswas, S.P.; Hosain, M.K.; Sheikh, M.R.I. A second order high performance resonant controller for single phase islanded microgrid. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 20–22 December 2019; pp. 1–6. [Google Scholar]
- Seifi, K.; Moallem, M. An adaptive PR controller for synchronizing grid-connected inverters. IEEE Trans. Ind. Electron. 2019, 66, 2034–2043. [Google Scholar] [CrossRef]
- Shuvo, S.; Hossain, E.; Khan, Z.R. Fixed point implementation of grid tied inverter in digital signal processing controller. IEEE Access 2020, 8, 89215–89227. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| PV Array | 1.5 kW | |
| Grid voltage | Vg | 400 V (L-L) |
| DC-link voltage | Vdc | 800 V |
| Grid frequency | ω0 | 50 Hz |
| Filter inductance | Lf | 4.6 mH |
| Filter capacitance | Cf | 11 µF |
| Carrier frequency | ωc | 10 kHz |
| Proportional constant | Kp | 25 |
| Integral constant | Ki | 1000 |
| Compensator constant | a | 25 |
| Controller | 1st Cycle (%) | 2nd Cycle (%) | 3rd Cycle (%) | 4th Cycle (%) | 5th Cycle (%) |
|---|---|---|---|---|---|
| PI [14] | 36.96 | 23.77 | 12.32 | 11.29 | 11.62 |
| PID [24] | 37.82 | 17.27 | 10.77 | 11.16 | 10.91 |
| PR [25] | 35.89 | 12.91 | 10.07 | 10.52 | 10.59 |
| PIR | 24.90 | 6.19 | 6.08 | 6.12 | 6.17 |
| Resonance + LC [24] | 27.66 | 1.06 | 1.10 | 1.08 | 1.10 |
| PIR + HC + LC (Proposed) | 27.11 | 0.54 | 0.55 | 0.55 | 0.52 |
| Controller Name | Advantages | Limitations |
|---|---|---|
| PI controller | Reduces steady-state error; simple operation | Reduces stability; inaccuracy; slow response |
| PID controller | Minimizes both transient and steady-state error; simple structure | Slow operational response; cannot work successfully under higher frequency |
| PR controller | Zero steady-state error; low computational burden | Controlling harmonics is difficult; rapid change in frequency variation |
| PIR controller | Minimizes steady-state error; controls changes in frequency variation | Creates overshoot; unstable for oscillatory response; slow response time |
| Resonance + LC controller | Provides phase lead; increases transient response | Implementation complexity; difficulty in reducing harmonics |
| Proposed controller | Limits the steady-state error; controls the lower order harmonics; minimizes the magnitude of error signal; easy to tune; increases transient response; successfully works in frequency variation |
Publisher ’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jahan, S.; Biswas, S.P.; Hosain, M.K.; Islam, M.R.; Haq, S.; Kouzani, A.Z.; Mahmud, M.A.P. An Advanced Control Technique for Power Quality Improvement of Grid-Tied Multilevel Inverter. Sustainability 2021, 13, 505. https://doi.org/10.3390/su13020505
Jahan S, Biswas SP, Hosain MK, Islam MR, Haq S, Kouzani AZ, Mahmud MAP. An Advanced Control Technique for Power Quality Improvement of Grid-Tied Multilevel Inverter. Sustainability. 2021; 13(2):505. https://doi.org/10.3390/su13020505
Chicago/Turabian StyleJahan, Sumaya, Shuvra Prokash Biswas, Md. Kamal Hosain, Md. Rabiul Islam, Safa Haq, Abbas Z. Kouzani, and M A Parvez Mahmud. 2021. "An Advanced Control Technique for Power Quality Improvement of Grid-Tied Multilevel Inverter" Sustainability 13, no. 2: 505. https://doi.org/10.3390/su13020505
APA StyleJahan, S., Biswas, S. P., Hosain, M. K., Islam, M. R., Haq, S., Kouzani, A. Z., & Mahmud, M. A. P. (2021). An Advanced Control Technique for Power Quality Improvement of Grid-Tied Multilevel Inverter. Sustainability, 13(2), 505. https://doi.org/10.3390/su13020505