2.1. Background
Air drag and tire rolling resistance are 2 of several parameters that oppose the vehicle’s forward movement. They are included in the road loads, the resistance forces that a vehicle experiences on the road and they are proportional to the vehicle’s speed, as described by the second-order polynomial function in Equation (1) [
11]. Several ways exist to derive the road loads of a vehicle. Measured forces corresponding to specific vehicle speeds, in a range that covers the minimum and maximum velocity of the vehicle, are fed to the polynomial.
F0,
F1,
F2 (also referred as road load coefficients) are obtained by minimizing the difference for all the speed, force pairs.
where:
| Deceleration Force (N) |
| constant resistance (N) |
| resistance proportional to vehicle speed (N/(km/h)) |
| resistance proportional to speed squared (N/(km/h)2) |
| Vehicle speed (km/h) |
From a theoretical point of view, the resistance forces are either constant and correspond to the tire rolling resistance,
F0
RRR, or proportional to the second power of the velocity and correspond to the air drag resistance force,
F2
Rd. Equations (2) and (3) show the theoretical calculation of these 2 forces [
12]. However, studies have pointed out that the tire rolling resistance can slightly increase as the velocity increases [
13,
14,
15]. In addition, depending on the test methodology, drivetrain losses can also be measured, which are proportional to the velocity.
where:
| air density (kg/m3) at reference conditions |
| aerodynamic drag coefficient (-) |
| frontal area of vehicle (m2) |
| vehicle speed (km/h) |
| rolling resistance coefficient (-) |
| weight of vehicle (N) |
A method that does not account for the drivetrain losses includes individual testing of each component that opposes the movement of the vehicle. The tire rolling resistance is measured on a steel test drum with predetermined vertical loads, speeds, and inflation pressures. Furthermore, a single condition is proposed for the need to produce data in a large array of tires (Simplified Standard Reference Condition [
16]). The aerodynamic drag is measured in a wind tunnel. Both tests are held inside facilities where it is possible to control all parameters that could affect the results, such as environmental conditions (ambient temperature, wind speed, etc.). This procedure allows for high repeatability of the results and aids in parametric evaluation [
17]. The disadvantage of this method is that the cost of these tests can be high, and they might not represent real driving conditions. A comparison between indoor and on-road measurement of
RRC showed that the indoor derived values were significantly lower [
18]. Except for measuring errors in road testing, the divergence was mainly attributed to the tire alignment (camber, toe) on the road, to uncontrolled environmental factors, and to the roughness of the actual asphalt of the road, which resulted in additional friction losses. The purpose of indoor testing is to give the influence of the individual component with high precision. For example, tire manufacturers are performing drum tests for their products since this is the mandatory procedure to determine the energy efficiency class of the tire.
Another test methodology is the coast-down method. It is frequently used in the CO
2 type approval procedure of light-duty vehicles (LDV) in Europe [
11,
19]. During the test, the vehicle is left to decelerate from a specified high speed. The times to decelerate in specific speed intervals are transformed to forces per velocity clusters. Three coefficients are derived by a least squared regression curve fitted to the data points (average velocity and average force pairs). The test is performed at a proving ground, where the impact of other parameters, such as traffic, is limited and the test path is well defined. The advantages include the need for less instrumentation, while it can achieve repeatable results [
20]. On the other hand, this kind of tests is time-consuming and includes the drivetrain losses. Moreover, HDVs require a long distance to obtain a speed reduction. This test procedure does not give the possibility to derive the forces that are directly related to the tire deformation and the shape of the vehicle. Nevertheless, it is suitable for the LDV CO
2 regulation for deriving the road load coefficients for the emission tests in the laboratory [
11]. A similar approach is used in the US HDV CO
2 certification methodology for deriving the tire rolling resistance and air drag coefficients. The coast-down is performed only for a high and a low-speed segment, allowing the use of short test tracks with good quality road surface. This can be highly important for getting comparable test results among different proving grounds. Additionally, a correction is applied to single out the speed-dependence of the axle spin losses and of the tire rolling resistance [
6]. In a study by the United States Environmental Protection Agency (US EPA, Washington, DC, USA) the methodology showed the ability to determine aerodynamic differences between tractors, and the effectiveness of devices to improve the aerodynamics. The standard error was below 2%, and the importance of at least 14 repetitions to reduce the uncertainty was pointed out [
21]. In a study contacted by National Research Council Canada, where they tried to reproduce the
Cd·
A values calculated by the US EPA for a vehicle under the same configuration, the difference was found to be within 5% [
22].
Other methodologies include wheel torque measurements. The method applied for the derivation of the
RRC and
Cd·
A of HDVs in Europe uses wheel torque meters during constant speed tests at 2 steady velocities. One at very low speed (10–15 km/h), where the impact of the aerodynamic forces is considered negligible and the measured force is attributed to the tire rolling resistance. The second speed (85–95 km/h) is close to the maximum speed the vehicle can achieve, and the extra force measured is attributed to the aerodynamic resistance [
5,
23]. The advantages of this method include the exclusion of the drivetrain losses and its high repeatability [
23,
24]. Regarding repeatability, in [
24], US EPA performed, in the same test site and with the same HDVs, both coast-down and constant speed test methodologies. The latter had lower standard deviation of the mean (under 0.5%), and lower dependency on the wind yaw angle. The downside is that it can be costly (the torque meter equipment) and requires a test track. Another approach that uses torque meters suggests that there is no need for steady speed tests, but the entire test’s wheel force measurement can be fitted to a regressor and a second-order polynomial function. This investigation showed that the coefficients have a better agreement with the tractive force than the coefficients derived from the coast-down test [
17]. More specifically, the coefficient of determination (R
2) was calculated to be 0.9926 and 0.9280 for the force method and the coast down, respectively.
The above-mentioned methodologies are well defined and provide adequate repeatability and reproducibility; however, they require specific equipment, instrumentation, and facilities. They are time-consuming and the test schedule cannot be combined with other activities. In a previous study [
25], the authors investigated the derivation of the resistance forces of LDVs using torque meter data from on-road tests, under real-world conditions on public roads. Taking into account that environmental parameters—which can dramatically affect the results—were not considered at the study, the accuracy of ±3–7% for the aerodynamic resistance as well as the good agreement in fuel consumption pose a good base for the present study. One drawback of the methodology is the need for the type approval road loads as boundaries to filter out outliers. Unfortunately, these values are not available for HDVs.
2.4. Data Processing and Road Load Calculation
The present study is based on the methodology described in [
25] with several enhancements to make it more robust and more broadly used. The current approach does not apply boundaries to determine if a measured force in a specific vehicle speed is valid. These boundaries were set for LDV’s, where the Original Equipment Manufacturer (
OEM) official road load coefficients (
F0
OEM,
F1
OEM,
F2
OEM) were available and experimentally derived. The methodology was applied to each trip individually.
The first step of the method includes the identification of the trip segments where the velocity can be considered constant. For that reason, the segments where the speed in each time step does not exceed the average velocity of the segment by more than 1 km/h are considered. This limit is justified by the fact that the speed measurements often come either from GPS, or On-board diagnostics (OBD) logging, so the accuracy can be limited. The derivation of the acceleration values from the low-resolution velocity signal can lead to dropping unrealistic values in segments that could be considered as constant. The selection of velocity rather than the acceleration signal as the mean for identifying the constant speed segments is also justified by the fact that velocity values are easier to interpret compared to acceleration ones.
With several segments of constant speed, the steady speed segments, the following sequence of actions is applied:
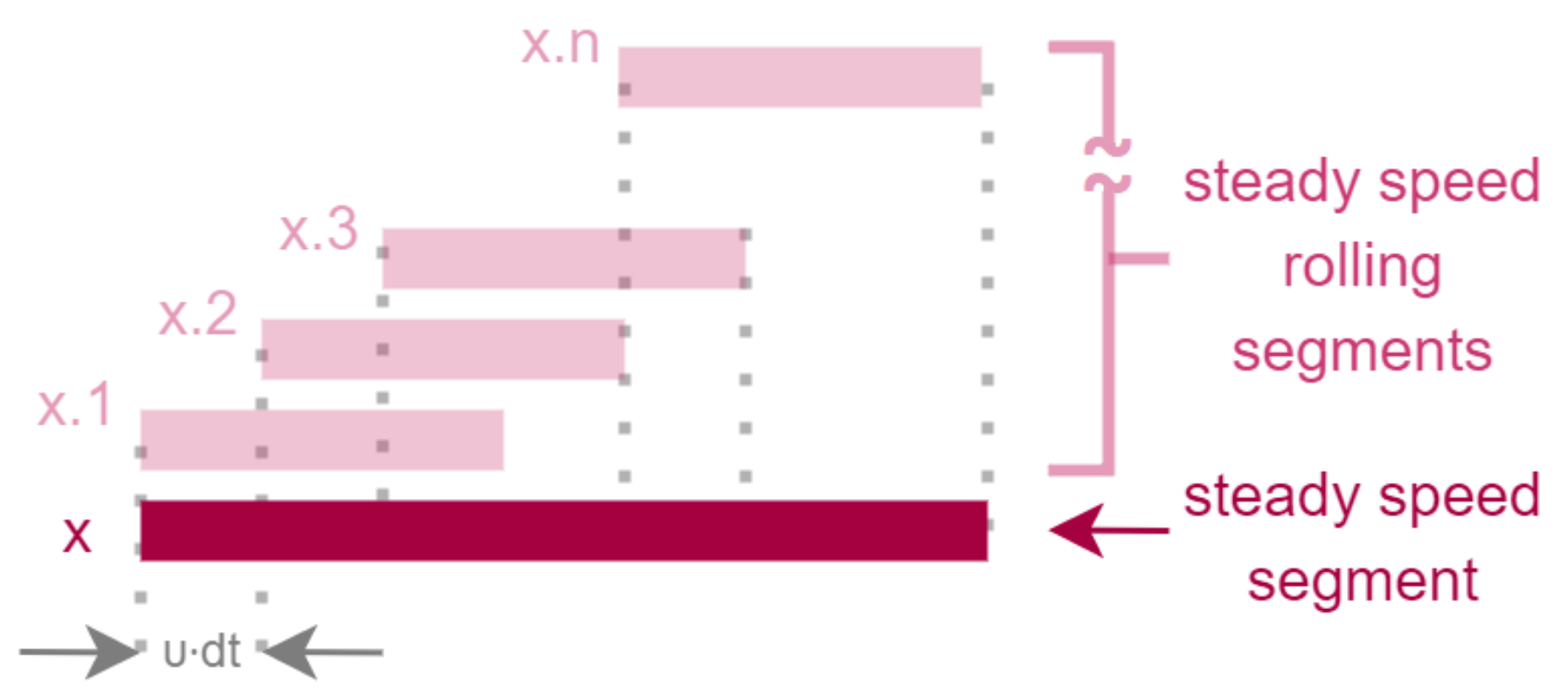
The next steps are related to the procedure for the calculation of the road load coefficients. Low-quality data or errors in the recording, especially in the GPS elevation signal, can affect the results negatively. For this reason, a distance-based rolling mean is applied creating multiple observations from each constant speed segment, the
steady speed rolling segments. This means that from each
steady speed segment several overlapping segments are created. In
Figure 2, a simple schematic example is presented. This way the outliers that are defined as the average values of wheel power that fall outside one standard deviation from the median of the segment can be excluded. Distance-based rolling mean was selected rather than time or sample-based, primarily because of the origin of the outliers we want to exclude, which are related to the vehicle position (GPS signal), and also because a constant value can be used in the same manner for different steady segments of different speeds of a trip. For further filtering of outliers, the produced rolling segments are processed. Segments with elevation and power signals appear noisy are dropped. In detail, rolling segments are excluded when the standard deviation of the elevation signal or the wheel power is higher than 0.4 m and 15 kW, respectively. These 2 values were derived empirically during the data analysis.
From the remaining rolling segments, the force per final
steady speed segment i is calculated as:
where the
is the median wheel power value, without the impact of the road inclination, from all the rolling segments of each individual
steady speed segment,
i.
is the average velocity of the segment
i in m/s. The reason for using the average segment speed instead of the median is that from the above procedure the speed values are inside a very limited range, thus there are no outliers that could drive the value used.
Until this point, there is filtering inside each
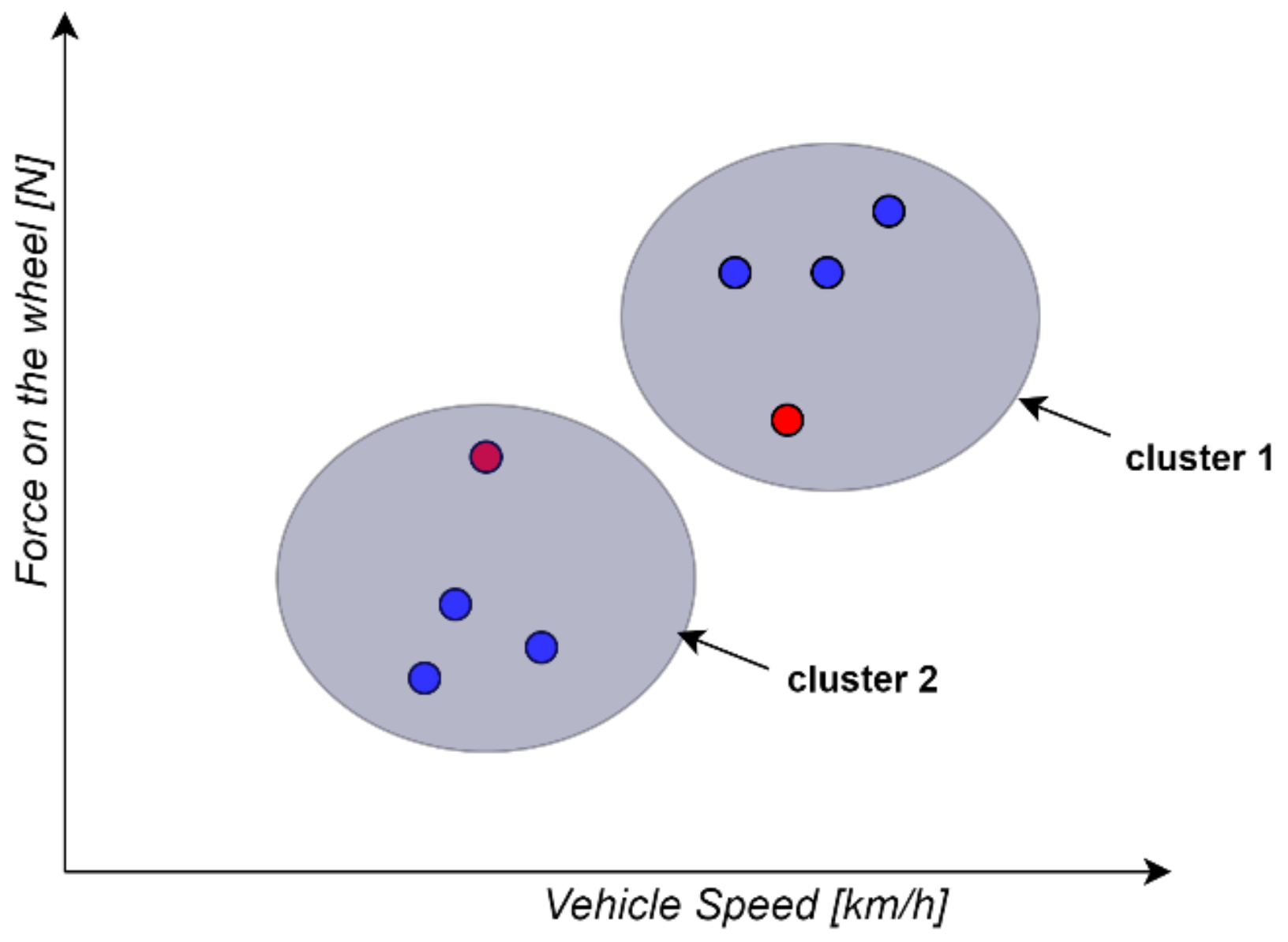
steady speed segment, but there is no interaction between the different ones at different speeds. It has been observed that the average force value of a
steady speed segment can be unrealistic compared to the average value of a
steady speed segment in a lower or higher speed. For this reason, extra filtering of outliers is applied, in which the average power values in the whole velocity range of the trip are grouped in velocity clusters. For that reason the K-Means clustering method is applied [
32]. From each group, the values that fall outside one standard deviation from the median are removed. A schematic simple example is presented in
Figure 3.
From the above steps, we consider that the pairs of velocity and power are robust, and any impact from a possible low signal quality, intervention of traffic, and wind sudden changes has been filtered out.
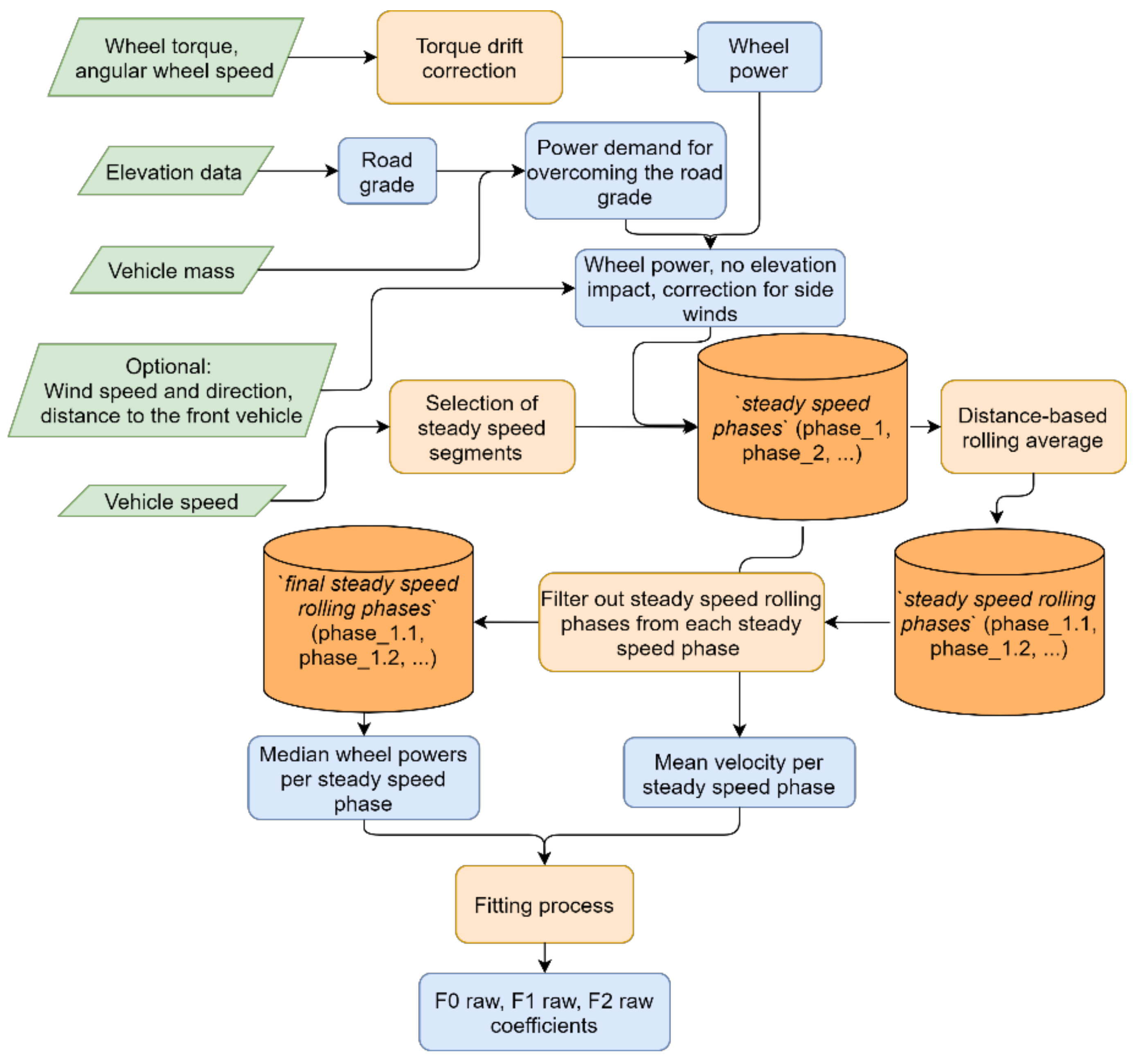
Then the fitting process follows with the aim of deriving the raw road load coefficients. The data passed to the fitting contain the median values of
steady speed rolling segments of each
steady speed segment. The measured power is at the wheel, so there is no impact from drivetrain losses. For this reason, resistances related to the first power of velocity (
F1 coefficient from Equation (1)) are limited to the range of ±0.1, to account for any small influence of the rolling resistance and air drag related to the velocity. Additionally, weights are added to the fitting of the points to determine the uncertainty of the force values (1-dimension sigma parameter as defined in [
33]). According to the weights, priority is given to the most robust force values, in the case that 2 (velocity, force) pairs have close velocity value but not realistic difference in force. The weights are produced as the product of the standard deviations of force, velocity and altitude, and the average speed of each point. The procedure up to this point is summarized in
Figure 4.
As explained above, the distance-based approach is essential for filtering out the outliers and the last step is the selection of the most appropriate distance value for the
steady speed rolling phases; appropriate in the sense of being long enough to contain segments with errors to be dropped. This distance value is selected after either an iterative procedure inside a range of values, or applying the minimization method Dual Annealing [
34,
35] to find the global minimum. The error function to minimize in both methods is the difference between the measured and simulated accumulated positive wheel power for the parts of the test where speeds are below 35 km/h and above 80% of the maximum speed achieved during the test. In more detail, the simulated wheel power is calculated with the Equation (5):
where
F0
raw,
F1
raw,
F2
raw are the raw road load coefficients derived by the fitting process, m is the vehicle mass with an addition of 4% to account for the rotational mass. The extra 4% is derived by the default value proposed in the EU CO
2 type approval certification procedure of LDVs [
11], with an additional 1% to account for the rotating mass of the wheel torque meters. The letter
α represents the longitudinal vehicle acceleration, and
θ is the road gradient. For the present study, the iterative procedure was selected, and the distance is obtained from a range of 40 to 140 m.
To derive the final test coefficients
F0
test,
F1
test,
F2
test and the
RRC and
Cd·
A values to be compared with the Type Approved values, further corrections are needed to have the same reference. In detail, for the final Road Load test coefficients, the
F1
test coefficient is set 0 since in the present study we are dealing with HDVs. The procedure to recalculate the
F0
test and
F2
test is shown in Equations (6)–(11). It is a practice followed in the LDV EU CO
2 certification procedure in the vehicle road load derivation with the coast down method. It is used to exclude the influence of the
F1 factor when comparing 2 different vehicle configurations. This way, the difference in F0 can be attributed to the different tire efficiency, and the difference in the
F2 to the different
Cd·
A. The coast down times are collected with a step of 10 km/h starting from maximum speed of 130 km/h. For HDV vehicle, as max value we use the more realistic 110 km/h.
Linear fitting of the
to the speed squared values is applied, as presented in Equation (8):
The intercept (
α) and the slope (
β) of the fitting are assigned to the
F0 and
F2, respectively, ending to the results as:
These coefficients are not corrected for the environmental conditions during the test (e.g., ambient temperature correction). In principle, this means that the test derived road load coefficients can better represent the specific test in the specific environmental conditions and vehicle state. To use them in tests performed in the dyno, normalization of the F0test, and F2test to the desired vehicle mass, and reference air density, respectively, should be applied.
The
RRC can be considered independent of the vehicle speed, while the
Cd·
A is influenced only by the vehicle speed squared. We use the methodology described above in the Equations (6)–(11), with one difference: The range of speed references as described in Equation (6) contains only the first and last speed values:
. The reason for this choice is explained in detail in [
25] and has to do with the influence of the original
F1
raw contribution. Using the full range of reference speeds as in Equation (6) for the linear fitting, the line produced by the adjusted road load coefficients (
F1
test,
F1test,
F2
test) might not pass through the experimentally derived points for low and high speeds, affecting the calculation of
RRC and
Cd·
A, respectively.
The calculated F0test and F2test are set equal to the F0RRR and F2Rd, as defined in Equations (2) and (3), respectively. The air density used is the one reflecting the average test weather temperature. This way the coefficient Cd·A is not affected by weather conditions, and it can be directly compared to the OEM’s declared value.
2.5. Vehicle Simulation
VECTO is the vehicle simulation tool developed by the European Commission to certify the fuel consumption and CO
2 emissions of new heavy-duty vehicles [
5]. In VECTO, the vehicle’s longitudinal vehicle dynamics are simulated over a driving cycle based on the vehicle’s technical properties (e.g., mass, air drag, tire rolling resistance) and a driver model. The instantaneous engine power is determined from the power demand at the wheels, the losses in each component of the powertrain and the auxiliary power demand. The engine speed is determined from the engaged gear, the powertrain gear ratios, and the dynamic tire radius. The engine torque and speed are used to interpolate from the engine fuel map to calculate the instantaneous fuel consumption. For the certification, the vehicle is simulated over pre-defined driving cycles, however for testing purposes, such as this investigation, custom driving cycles can be simulated with a target vehicle speed or wheel power.
The test cycles were simulated in VECTO with the calculated Cd·A and RRC as input to validate the methodology. A model of each vehicle was built in the tool based on the available vehicle properties and with reverse-engineered efficiency maps for the axle and transmission and fuel consumption map for the engine. The measured vehicle speed, the engaged gear, and the road gradient derived from the GPS signal were given as input. All measurement signals were down- or up sampled to 2 Hz.
To validate the vehicle models, the test cycles were simulated in
Pwheel mode as well. In this case, the measured wheel power, the engine speed, and the engaged gear were given as input to VECTO. As a result, the driver model and vehicle road load parameters (
Cd·
A, tire
RRC and vehicle mass) are bypassed, allowing a validation of the vehicle’s powertrain. The error between the simulated and the measured fuel consumption in
Pwheel mode is less than 1.2% for each vehicle (
Table 4), demonstrating an accurate model of the vehicle’s power train.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}