
Interval Type-2 Fuzzy Logic Anti-Lock Braking Control for Electric Vehicles under Complex Road Conditions



Abstract
:1. Introduction
- (1)
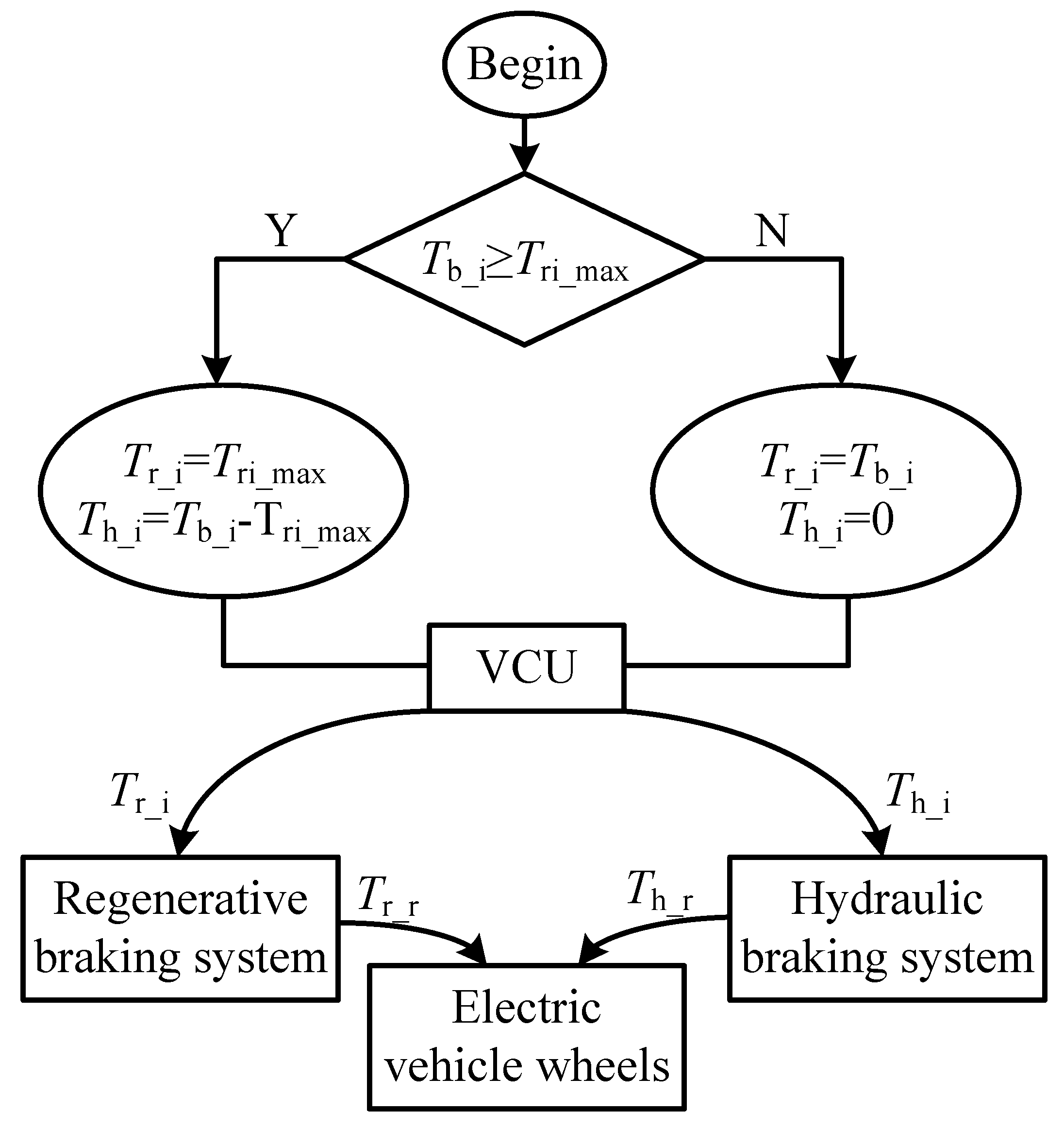
- The structure composition and operating principle of the proposed interval type-2 fuzzy logic electro-hydraulic compound anti-lock braking system is given out in detail, and the allocation strategy is designed by considering the balance between the energy recovery efficiency and braking safety.
- (2)
- Considering the uncertain road conditions of anti-lock braking control, the single fuzzy variable is described by membership function of two different levels by using the membership function expansion method and set the secondary membership degree of fuzzy variable to a constant value of 1 to enhance the ability of anti-interference for fuzzy control under massive uncertainty information during the braking process, and Karnik–Mendel (KM) algorithm fuzzy type reduction method is adopted to solve the complex calculation problem of generalized type-2 fuzzy reasoning.
2. System Model
2.1. Dynamic Model of Automobile Brake System
2.2. Tire Model
2.3. Hydraulic Braking System Model
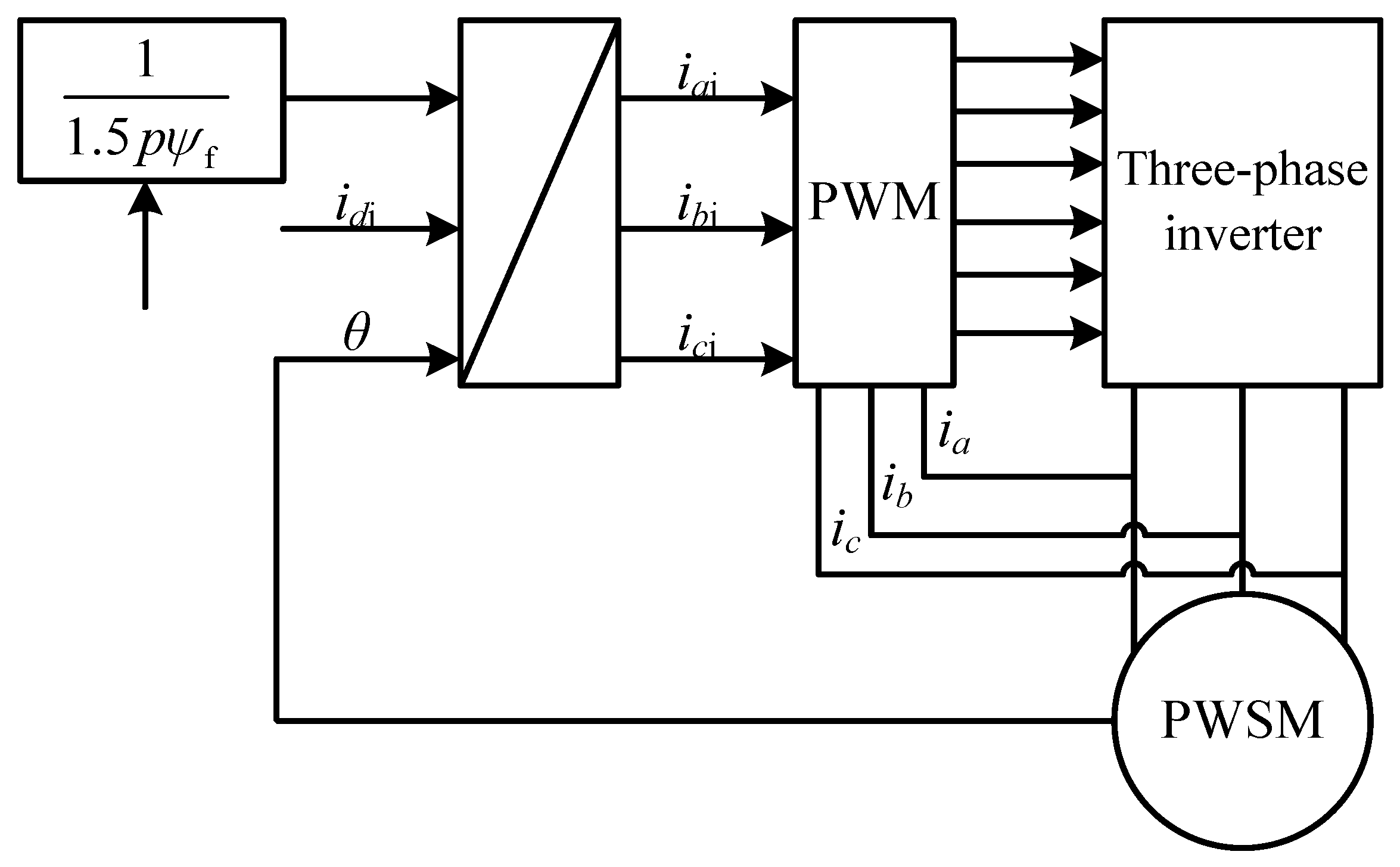
2.4. Regenerative Braking Dynamics Model
3. Design of Interval Type-2 Fuzzy Logic Anti-Lock Braking Control System
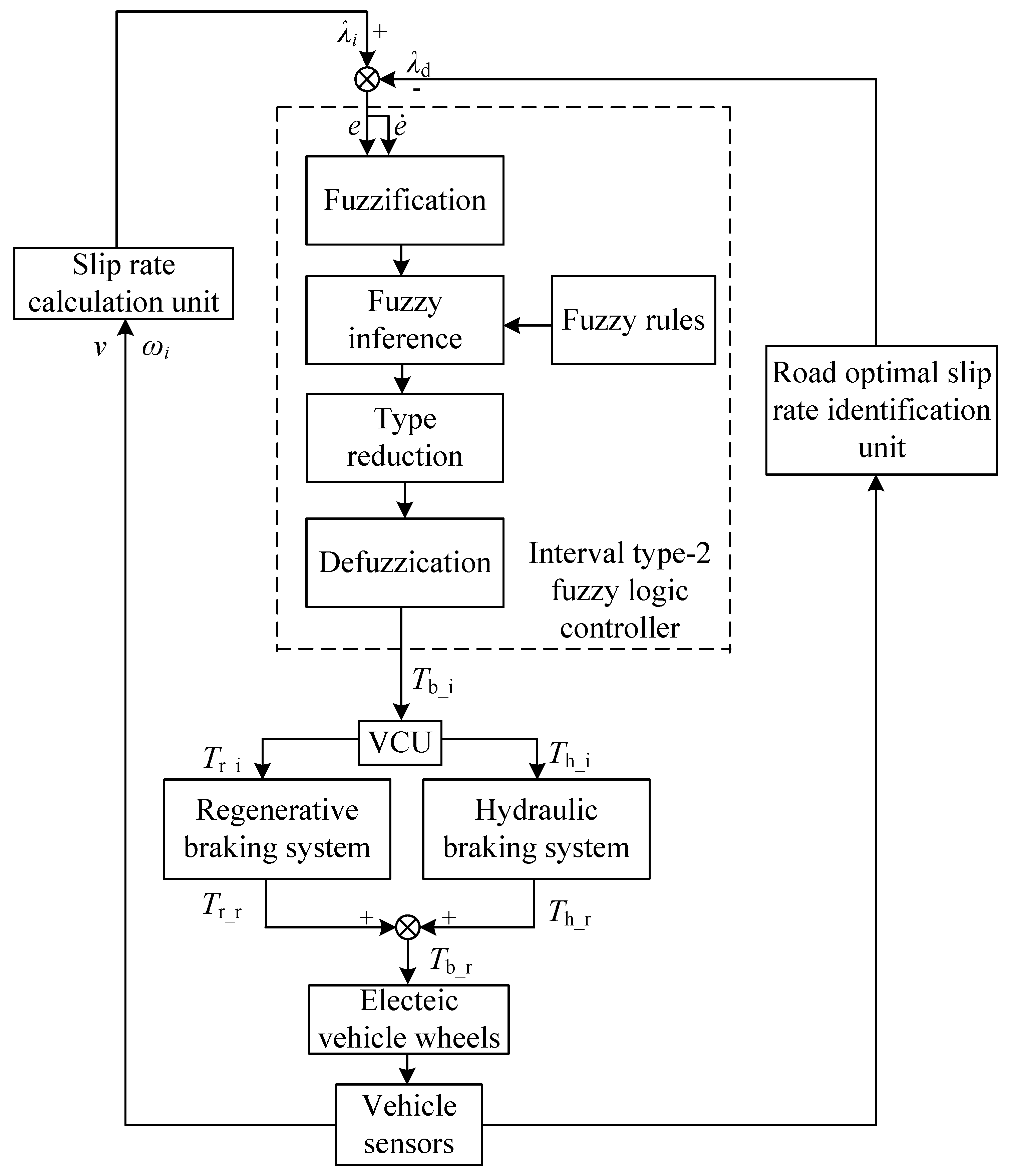
3.1. Overview of Interval Type-2 Fuzzy Logic Control Strategy
3.2. Design of Interval Type-2 Fuzzy Logic Anti-Lock Braking Control System
- (1)
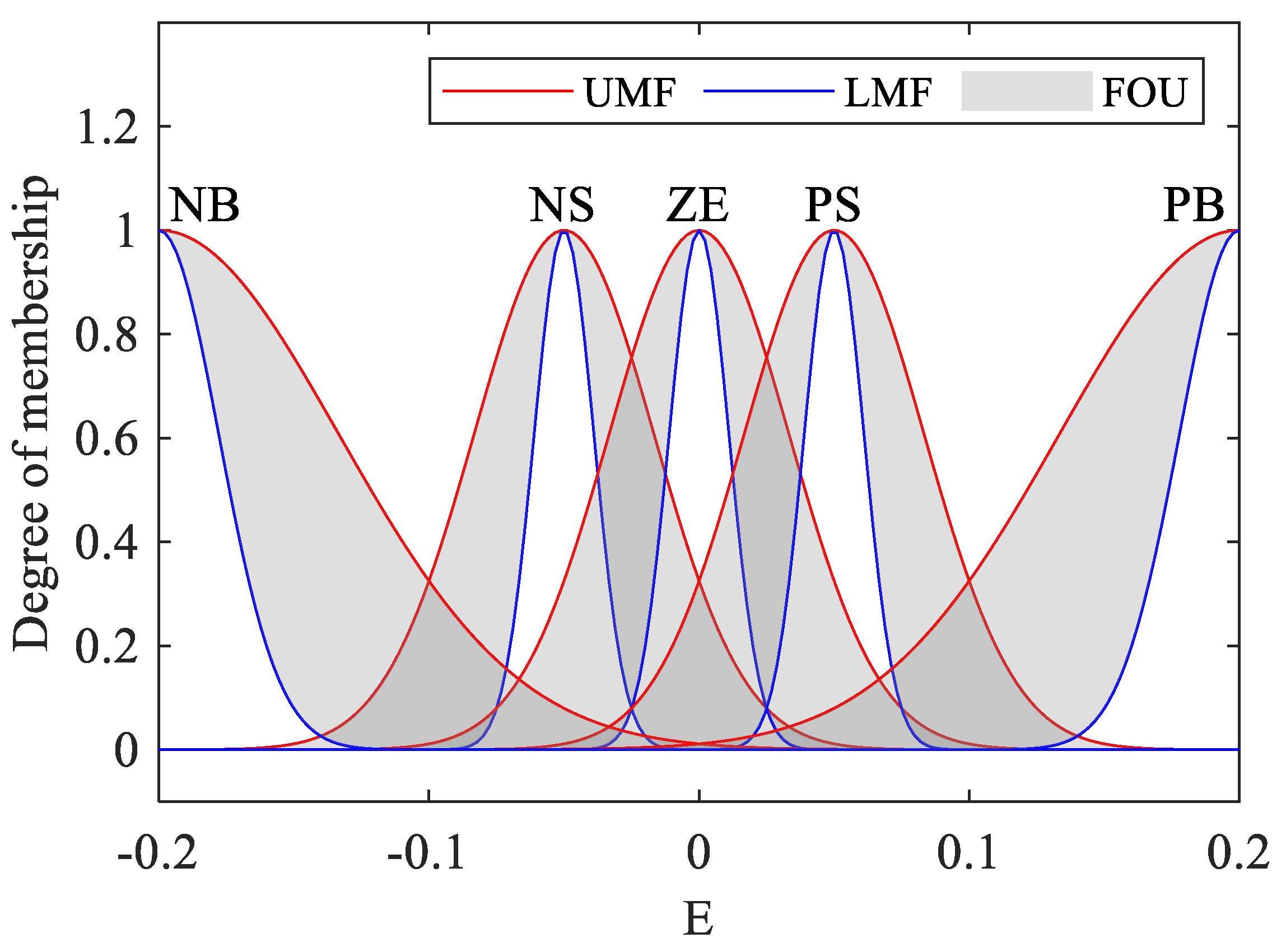
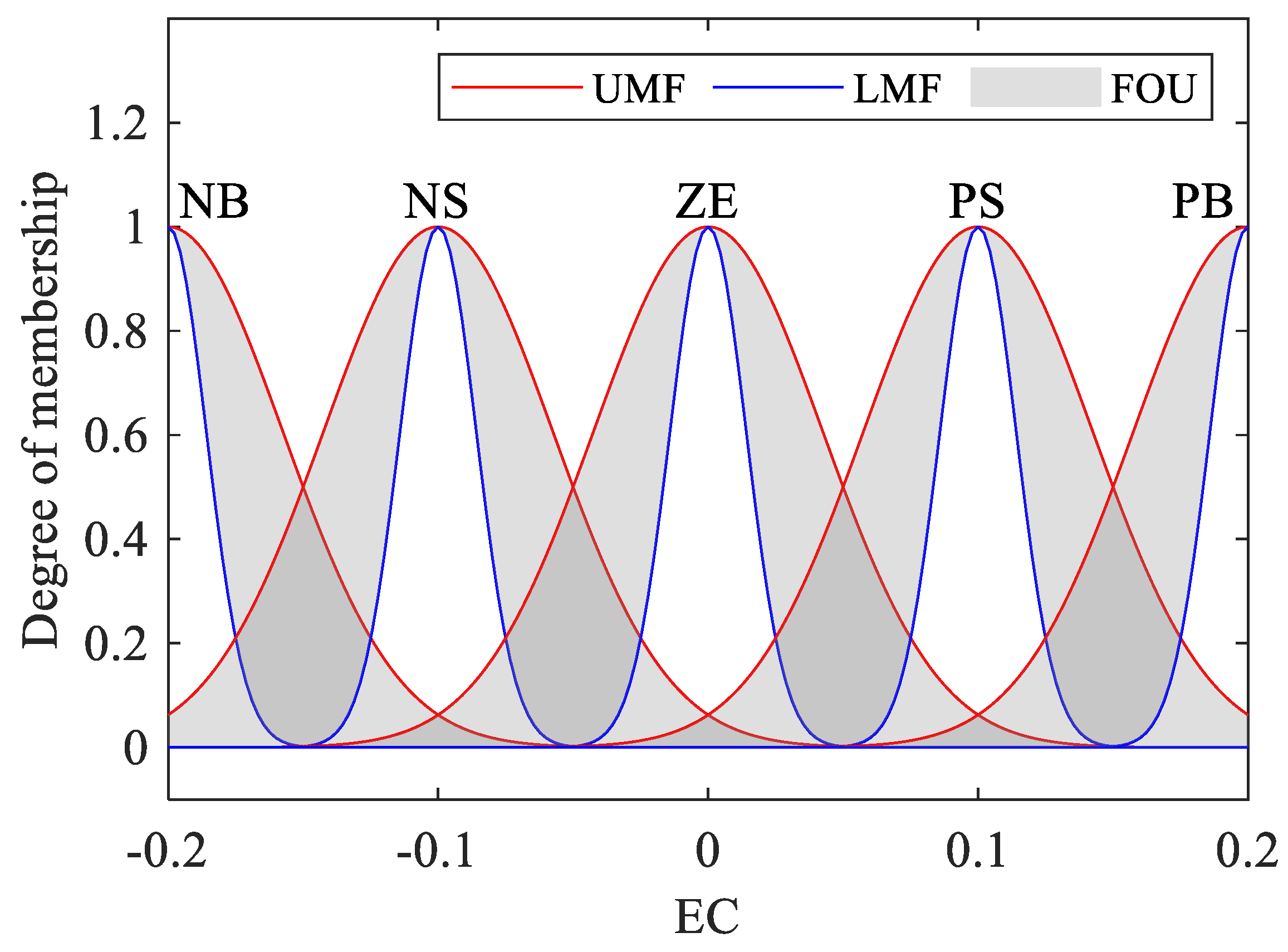
- Calculate the membership interval of the fuzzy input variable e and the membership interval of the fuzzy input variable .
- (2)
- Calculate the activation degree interval Fmn (e,) of each rule. The computational formula is as follows:where is the lower edge of the activate interval for the number mn rule; is the upper edge of the activate interval for the number mn rule. “” stands for the minimum value t-norm.
3.3. Allocation Strategies of Anti-Lock Braking Wheel Cylinder Pressure
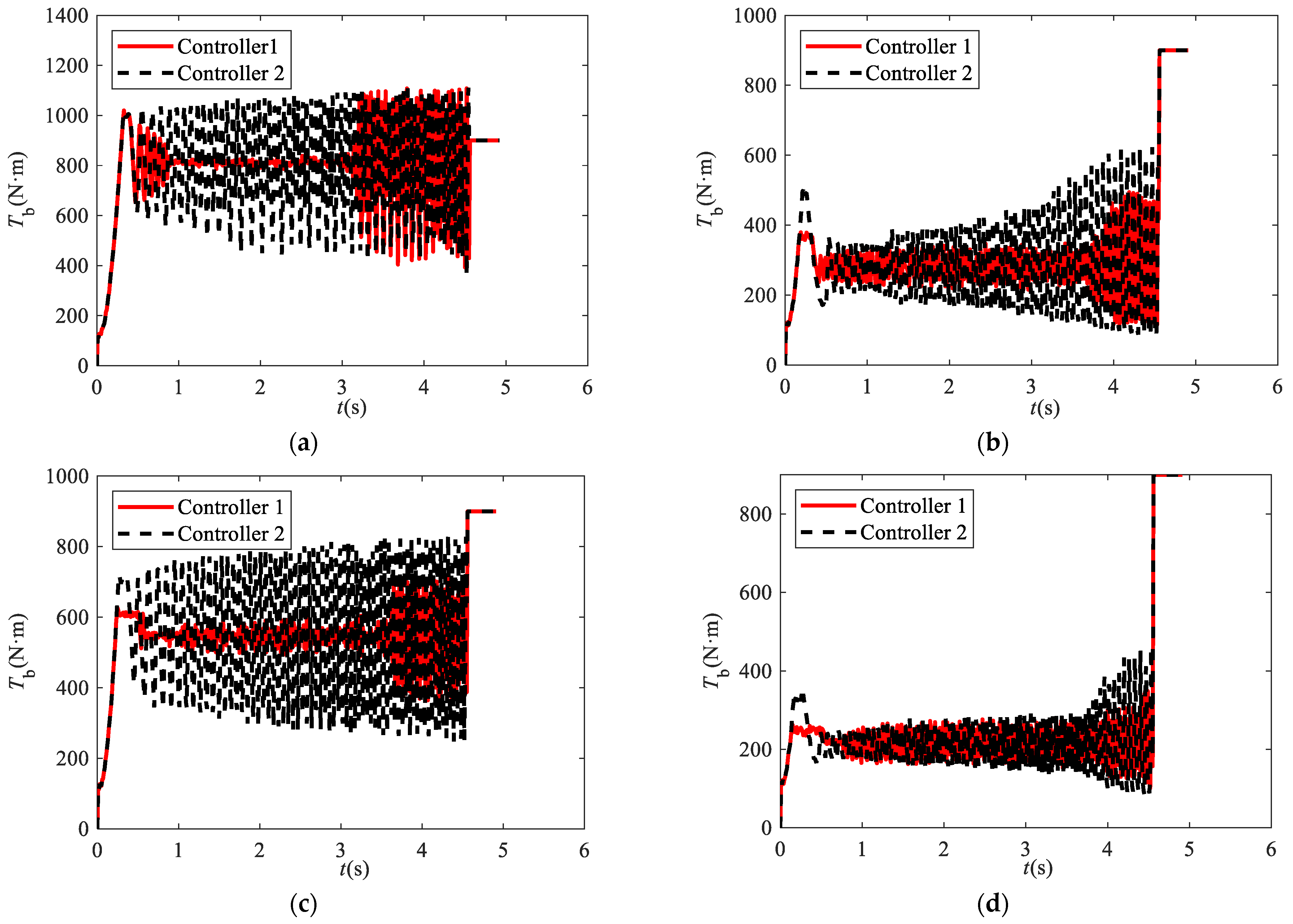
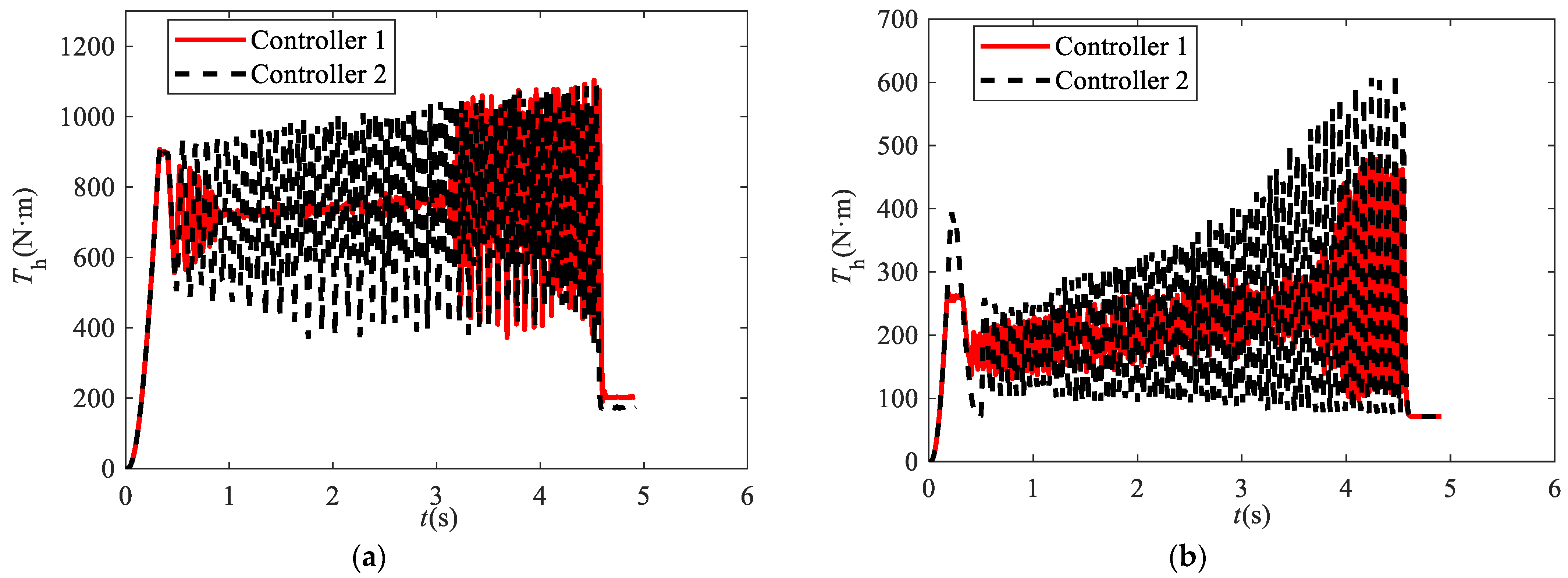
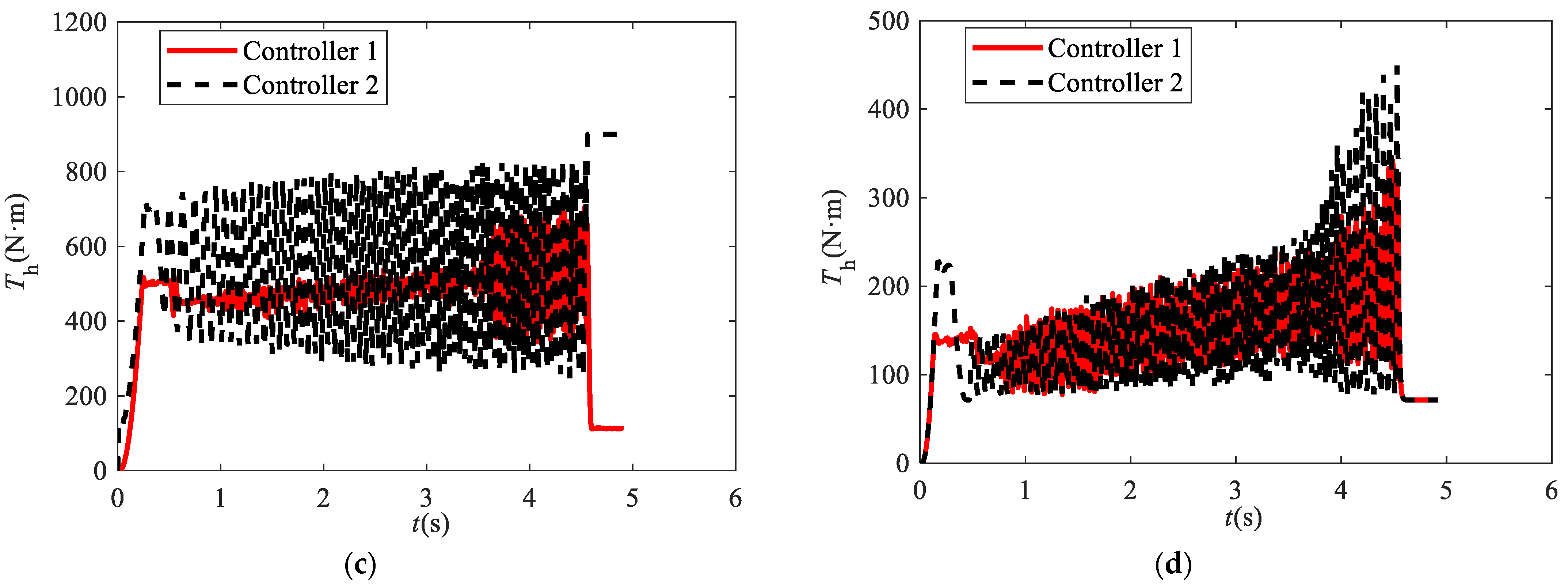
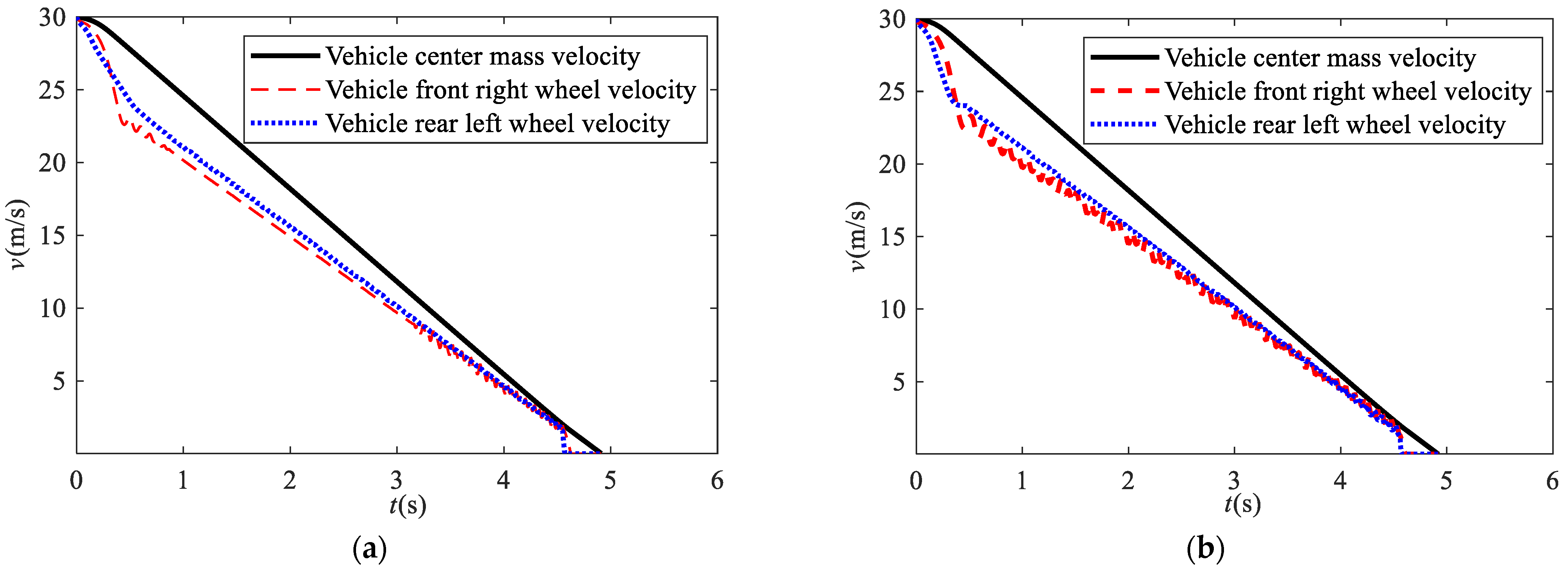
4. Simulation Results and Discussion
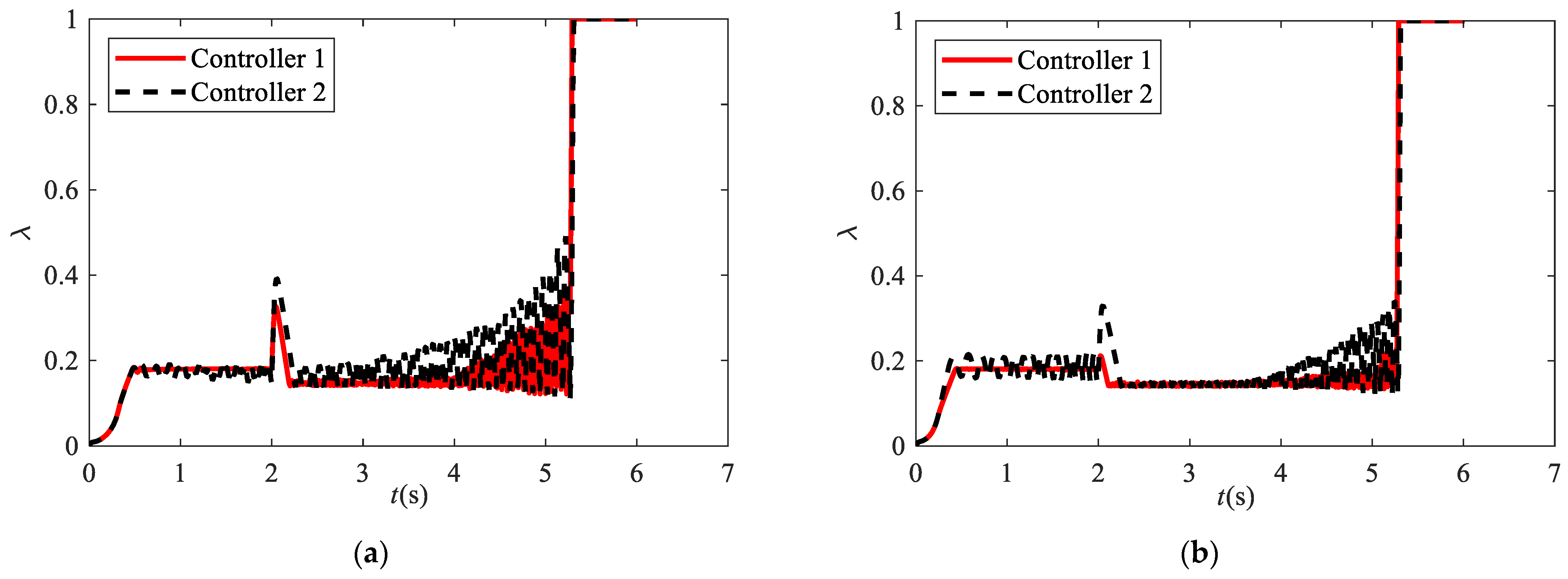
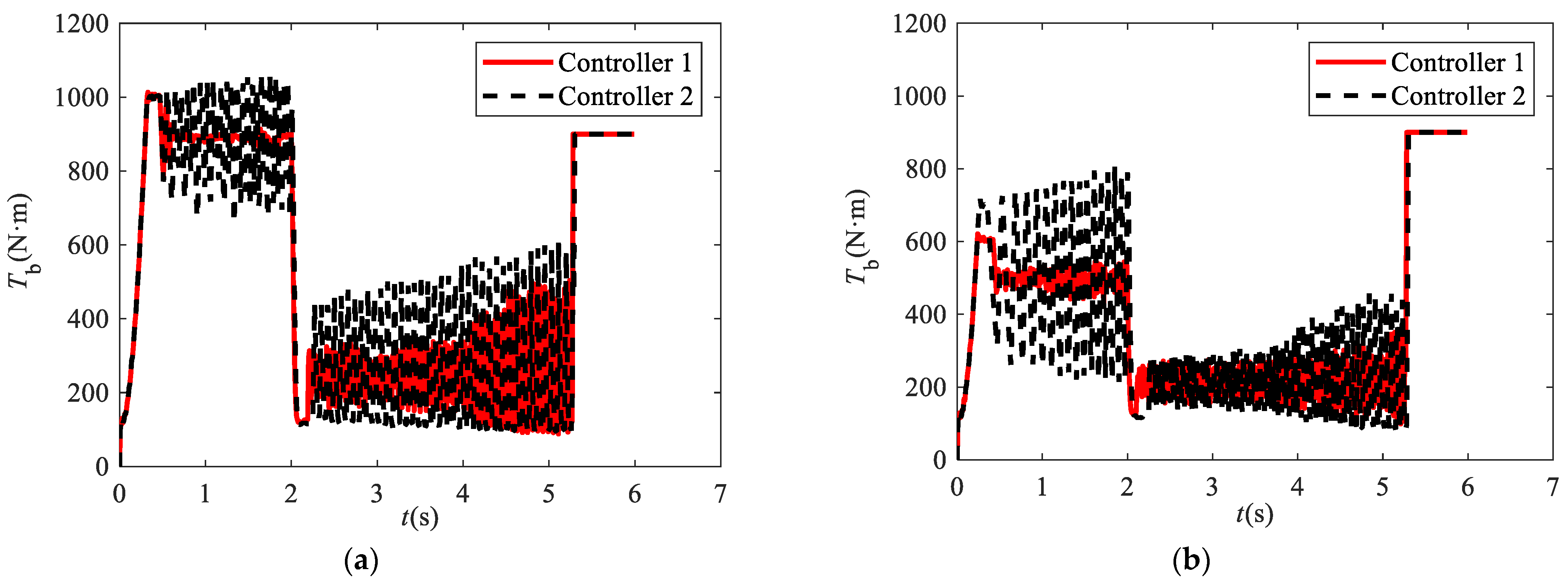
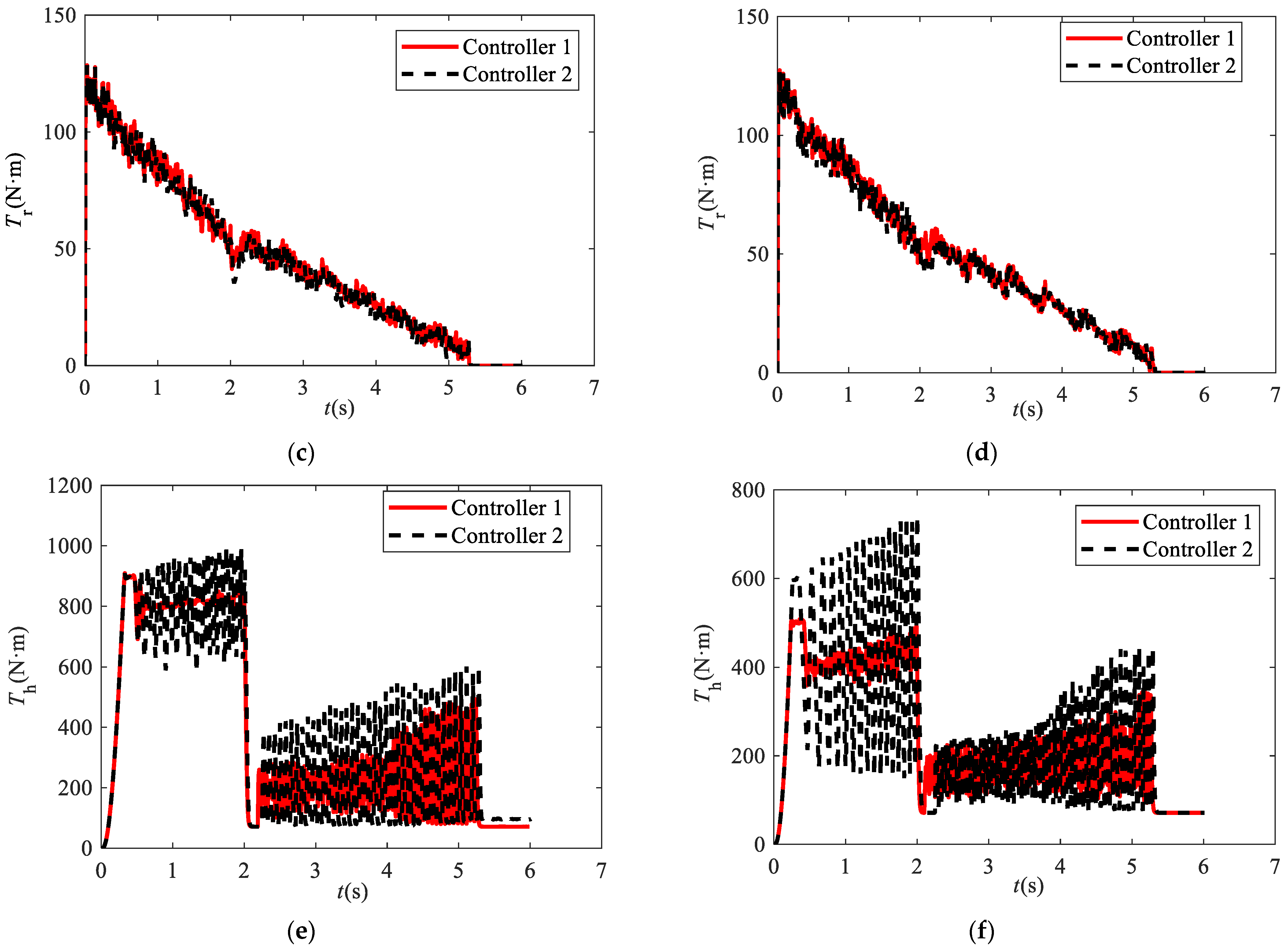
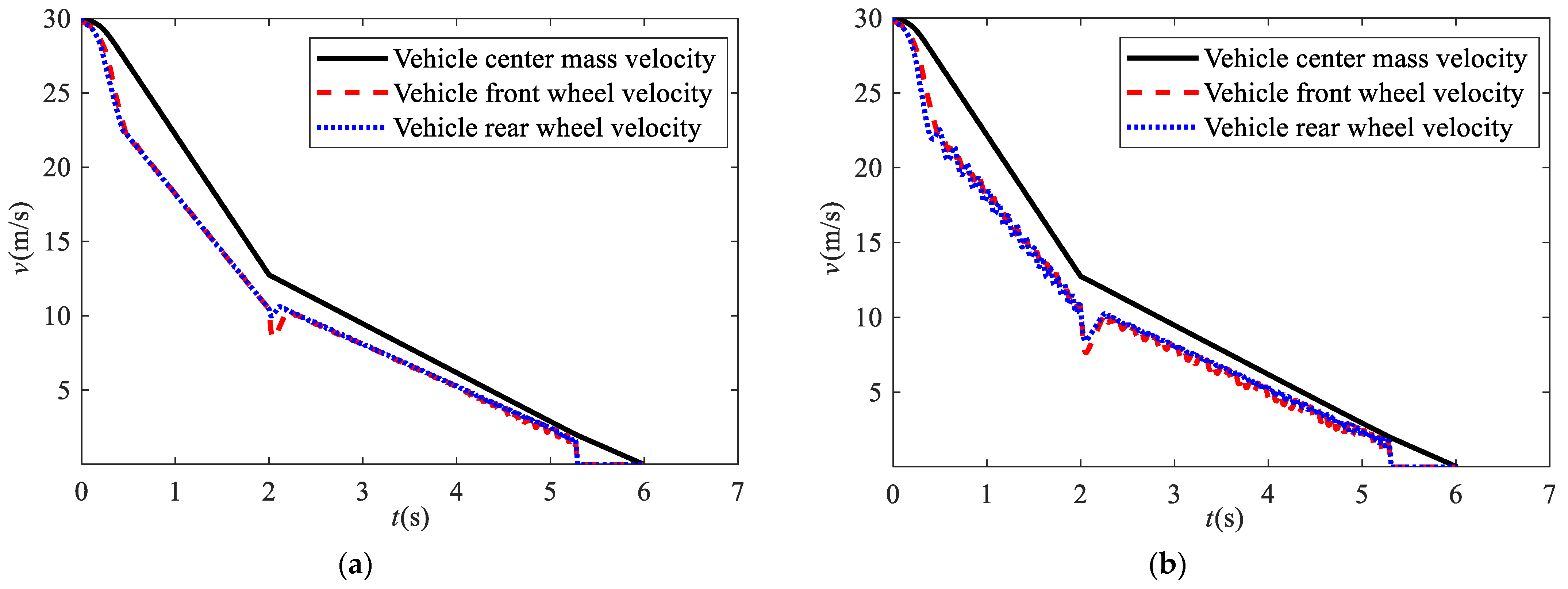
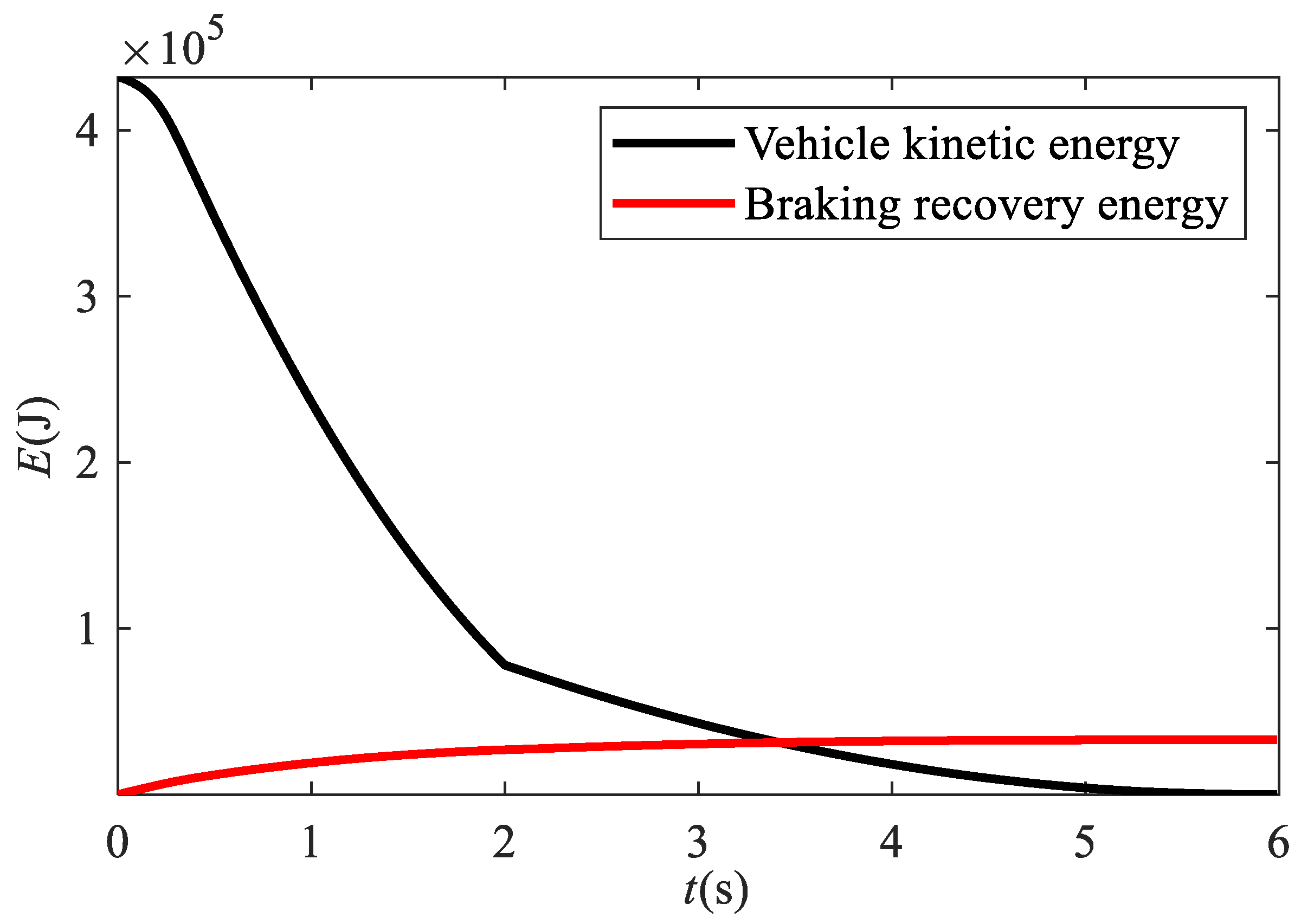
4.1. Braking Performance Comparison under the Joint-μ Road Surface
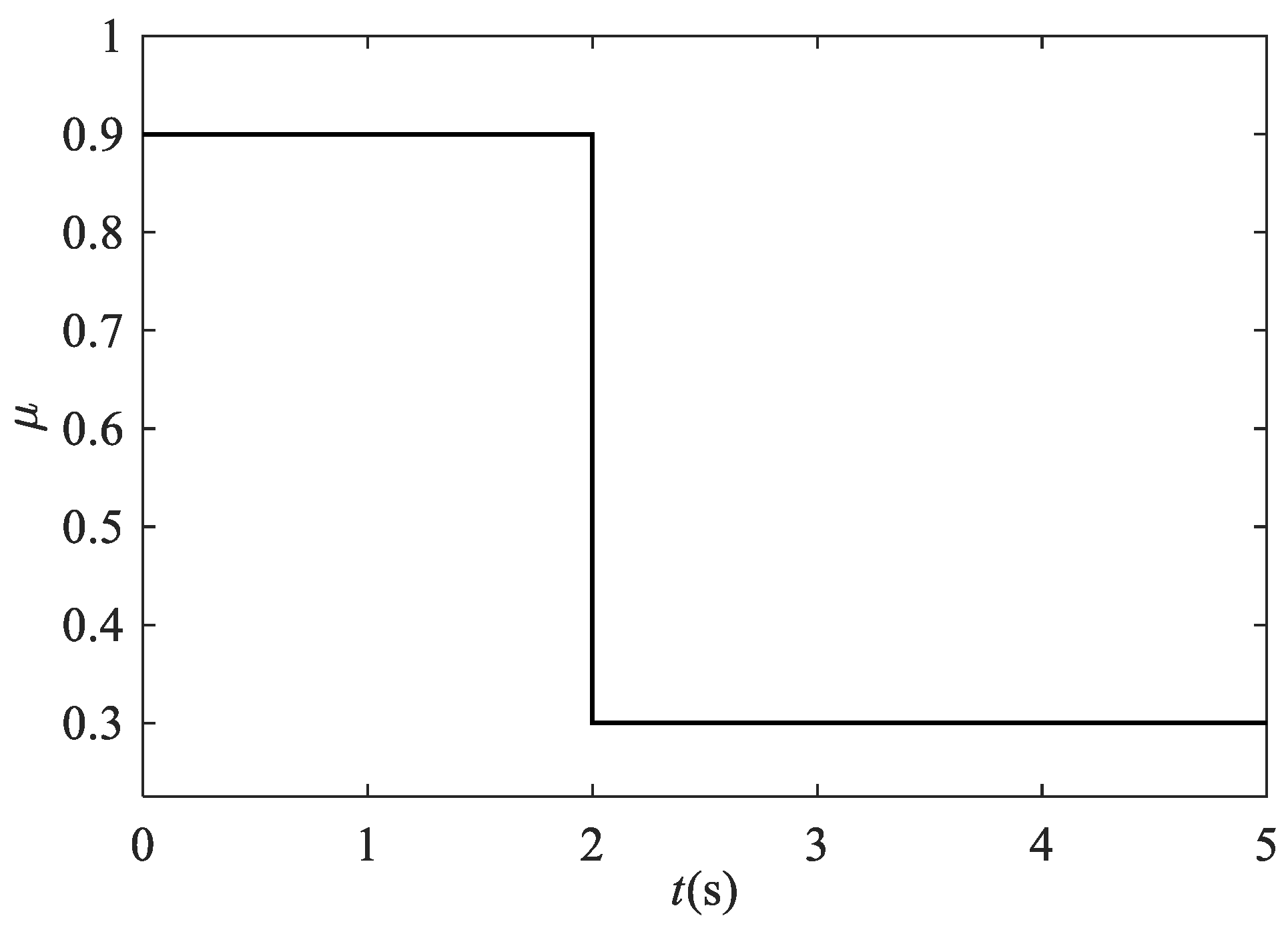
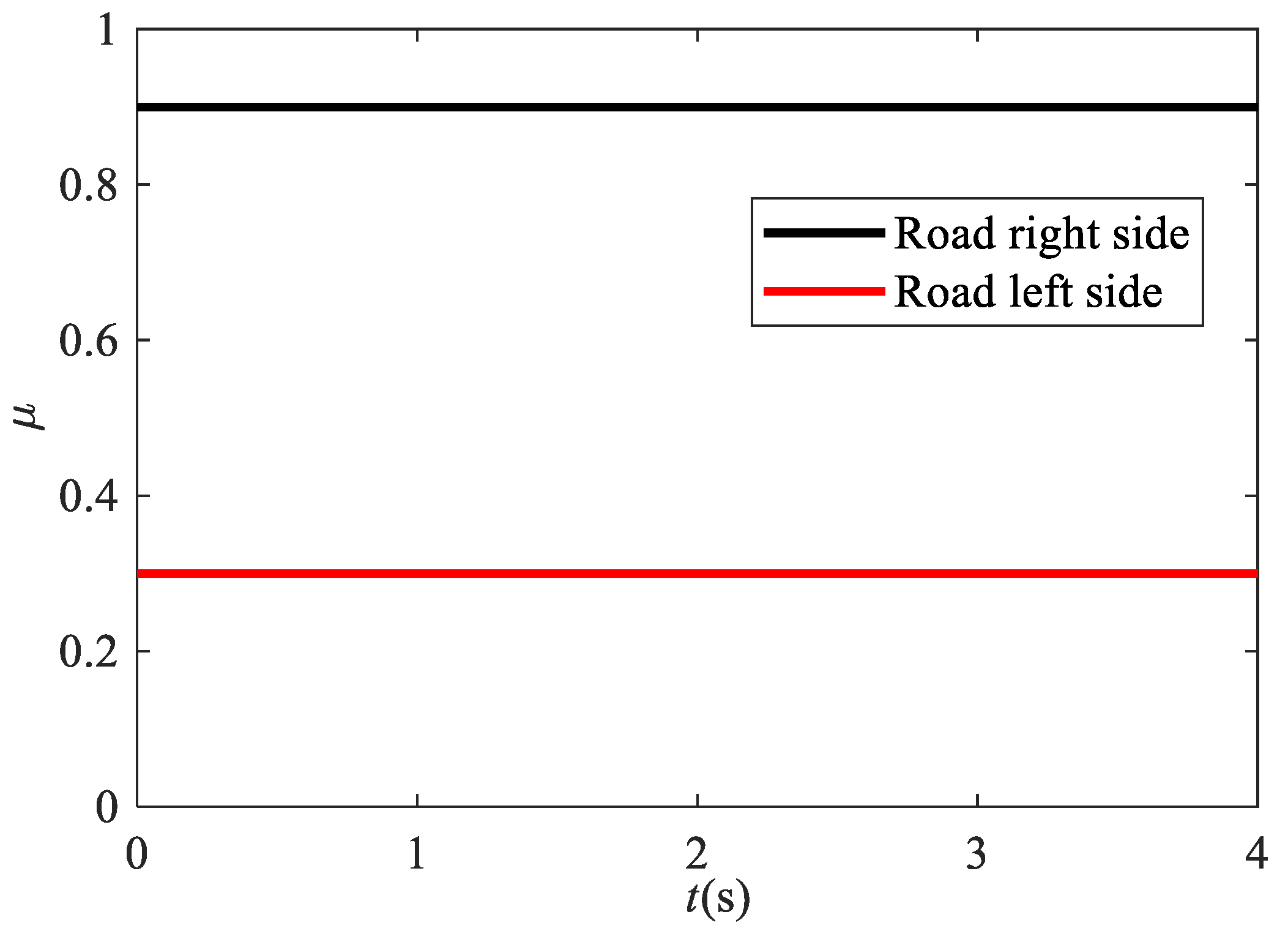
4.2. Braking Performance Comparison under the Spilt-μ Road Surface
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| A | windward area of vehicle | Rω | rolling radius of wheel |
| type-2 fuzzy set of e | RΩ | internal resistance of motor | |
| Af | area of brake wheel cylinder piston | SH | horizontal bias of Magic Formula tire model |
| B | stiffness coefficient of Magic Formula tire model | SV | vertical bias of Magic Formula tire model |
| type-2 fuzzy set of | Tb | braking torque | |
| C | shape coefficient of Magic Formula tire model | Tb_i | ideal anti-lock braking torque |
| type-2 fuzzy set of Tb_i | Tb_il | left endpoint of the interval type-2 fuzzy set output | |
| Ce | equivalent liquid capacity characteristic coefficient of the pipeline and wheel cylinder | Tb_ir | right endpoint of the interval type-2 fuzzy set output |
| c | the center position of the membership function | Tb_r | real anti-lock braking torque |
| D | peak value of Magic Formula tire model | Td | driving torque |
| d | d-axis of permanent magnet synchronous motor | Tf | rolling resistance torque |
| E | curvature coefficient of Magic Formula tire model | Th | hydraulic braking torque |
| e | difference value of wheel slip rate and the ideal slip rate | Th_i | ideal hydraulic braking torque |
| change rate of e | Th_r | real hydraulic braking torque | |
| slip rate error | Tr | regenerative braking torque | |
| Fx | longitudinal force | Tr_i | ideal regenerative braking torque |
| Fy | lateral force | Tr_r | real regenerative braking torque |
| FD | air resistance force | Tri_max | maximum energy recovery regenerative braking torque |
| Ff | rolling resistance force | tf | front wheelbase |
| Fmn | activation degree interval of mn rule | tr | rear wheelbase |
| f | upper bound of the interval type-2 fuzzy output interval | u | second variables of type-2 fuzzy set |
| g | lower bound of the interval type-2 fuzzy output interval | ud | voltage motor d-axis |
| Iz | vehicle’s moment of inertia around the z-axis | uq | voltage motor q-axis |
| ia | actual current of phase a | vx | velocity of electric vehicle along the x-axis |
| ib | actual current of phase b | vy | velocity of electric vehicle along the y-axis |
| ic | actual current of phase c | acceleration of electric vehicle along the x-axis | |
| iai | expected current of phase a | acceleration of electric vehicle along the y-axis | |
| ibi | expected current of phase b | X | fuzzy domain |
| ici | expected current of phase c | x | first variable of type-2 fuzzy set |
| id | current of motor d-axis | Y | output variable of Magic Formula tire model |
| iq | current of motor q-axis | β | angle between the air resistance and the driving direction |
| idi | expected current of motor d-axis | γ | vehicle yaw angle |
| iqi | expected current of motor q-axis | yaw angular velocity | |
| Jx | primary membership degree | steering angle of the wheel | |
| Jw | wheel’s moment of inertia | η | wheel cylinder efficiency |
| L | left transition point | θ | rotation angle of rotor |
| Ld | inductor of motor d-axis | λ | slip rate |
| Lq | inductor of motor q-axis | λd | ideal slip rate |
| la | distances between the mass center of the vehicle and the front axle | μ | road peak adhesion coefficient |
| lb | distances between the mass center of the vehicle and the rear axle | μb | friction coefficient of brake |
| m | the mass of the electric vehicle | secondary membership degree | |
| Pm | pressure of the main cylinder | ψf | motor magnetic chain |
| Pr | pressure of low-pressure accumulator | τ | time delay of brake |
| Pw | pressure of the wheel cylinder | transmission lag time of solenoid valve and pipeline during pressurization | |
| p | number of pole-pairs | transmission lag time of solenoid valve and pipeline during decompression | |
| q | q-axis of permanent magnet synchronous motor | ω | angular velocity of wheel |
| R | the right transition point | angular acceleration of the wheel | |
| Rb | brake effective radius of friction | ωd | rotor angular velocity of motor |
| Re | equivalent liquid resistance characteristic coefficient of the pipeline and wheel cylinder when the pressure is increased | lower edge of the activate interval for number mn rule | |
| equivalent liquid resistance characteristic coefficient of the pipeline and wheel cylinder when the pressure is reduced | upper edge of the activate interval for number mn rule |
References
- Hu, D.H.; Wang, Y.T.; Li, J.W.; Yang, Q.Q.; Wang, J. Investigation of optimal operating temperature for the PEMFC and its tracking control for energy saving in vehicle applications. Energy Convers. Manag. 2021, 249, 114842. [Google Scholar] [CrossRef]
- Liu, B.H.; Li, L.; Wang, X.Y.; Cheng, S. Hybrid electric vehicle downshifting strategy based on stochastic dynamic programming during regenerative braking process. IEEE Trans. Veh. Technol. 2018, 67, 4716–4727. [Google Scholar] [CrossRef]
- Ko, S.; Song, C.; Kim, H. Cooperative control of the motor and the electric booster braking to improve the stability of an in-wheel electric vehicle. Int. J. Automot. Technol. 2016, 17, 447–456. [Google Scholar] [CrossRef]
- Pretagostini, F.; Ferranti, L.; Berardo, G.; Ivanov, V.; Shyrokau, B. Survey on wheel slip control design strategies, evaluation and application to antilock braking systems. IEEE Access 2020, 8, 10951–10970. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, J.Z.; Li, Y.T.; Li, C. A novel regenerative electrohydraulic brake system: Development and hardware-in-loop tests. IEEE Trans. Veh. Technol. 2018, 67, 11440–11452. [Google Scholar] [CrossRef]
- Rajendran, S.; Spurgeon, S.K.; Tsampardoukas, G.; Hampson, R. Estimation of road frictional force and wheel slip for effective anti-lock braking system (ABS) control. Int. J. Robust Nonlinear Control 2019, 29, 736–765. [Google Scholar] [CrossRef] [Green Version]
- Chiang, W.P.; Yin, D.J.; Shimizu, H. Slip-based regenerative ABS control for in-wheel-motor drive EV. J. Chin. Inst. Eng. 2015, 38, 220–231. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, Q.S.; Bolin, L.; Fu, C.Y. Dynamic coordinated control for regenerative braking system and anti-lock braking system for electrified vehicles under emergency braking conditions. IEEE Access 2020, 8, 172664–172667. [Google Scholar] [CrossRef]
- Feng, X.L.; Hu, J. Discrete fuzzy adaptive PID control algorithm for automotive anti-lock braking system. J. Ambient. Intell. Humaniz. Comput. 2021, 1–10. [Google Scholar] [CrossRef]
- Sun, J.H.; Xue, X.D.; Cheng, K.W.E. Fuzzy sliding mode wheel slip ratio control for smart vehicle anti-lock braking system. Energies 2019, 12, 2501. [Google Scholar] [CrossRef] [Green Version]
- Verma, R.; Ginoya, D.; Shendge, P.D.; Phadke, S.B. Slip regulation for anti-lock braking system using multiple surface sliding controller combined with inertial delay control. Veh. Syst. Dyn. 2015, 53, 1150–1171. [Google Scholar] [CrossRef]
- Nguyen, A.-T.; Taniguchi, T.; Eciolaza, L.; Campos, V.; Palhares, R.; Sugeno, M. Fuzzy control systems: Past, present and future. IEEE Comput. Intell. Mag. 2019, 14, 56–58. [Google Scholar] [CrossRef]
- Wang, T.C.; Sui, S.; Tong, S.C. Data-based adaptive neural network optimal output feedback control for nonlinear systems with actuator saturation. Neurocomputing 2017, 247, 192–201. [Google Scholar] [CrossRef]
- Banaei, A.; Alamatian, J. New genetic algorithm for structural active control by considering the effect of time delay. J. Vib. Control 2021, 27, 743–758. [Google Scholar] [CrossRef]
- Fargione, G.; Tringali, D.; Risitano, G. A fuzzy-genetic control system in the ABS for the control of semi-active vehicle suspensions. Mechatronics 2016, 3, 89–102. [Google Scholar] [CrossRef]
- Aksjonov, A.; Vodovozov, V.; Augsburg, K.; Petlenkov, E. Design of regenerative anti-lock braking system controller for 4 in-wheel-motor drive electric vehicle with road surface estimation. Int. J. Automot. Technol. 2018, 19, 727–742. [Google Scholar] [CrossRef] [Green Version]
- Mokarram, M.; Khoei, A.; Hadidi, K. A fuzzy Anti-lock braking system (ABS) controller using CMOS circuits. Microprocess. Microsyst. 2019, 70, 47–52. [Google Scholar] [CrossRef]
- Castillo, O.; Amador-Angulo, L.; Castro, J.R.; Garcia-Valdez, M. A comparative study of type-1 fuzzy logic systems, interval type-2 fuzzy logic systems and generalized type-2 fuzzy logic systems in control problems. Inf. Sci. 2016, 354, 257–274. [Google Scholar] [CrossRef]
- Hailemichael, A.; Salaken, S.M.; Karimoddini, A.; Homaifar, A.; Abbas, K.; Nahavandi, S. Developing a computationally effective interval type-2 TSK fuzzy logic controller. J. Intell. Fuzzy Syst. 2020, 38, 1915–1928. [Google Scholar] [CrossRef]
- Gonzalez, C.I.; Melin, P.; Castro, J.R.; Mendoza, O.; Castillo, O. An improved sobel edge detection method based on generalized type-2 fuzzy logic. Soft Comput. 2016, 20, 773–784. [Google Scholar] [CrossRef]
- Zhang, Z.M. Trapezoidal interval type-2 fuzzy aggregation operators and their application to multiple attribute group decision making. Neural Comput. Appl. 2018, 29, 1039–1054. [Google Scholar] [CrossRef]
- Gaxiola, F.; Melin, P.; Valdez, F.; Castro, J.R.; Castillo, O. Optimization of type-2 fuzzy weights in backpropagation learning for neural networks using Gas and PSO. Appl. Soft Comput. 2016, 38, 860–871. [Google Scholar] [CrossRef]
- Sanchez, M.A.; Castillo, O.; Castro, J.R. Generalized type-2 fuzzy systems for controlling a mobile robot and a performance comparison with interval type-2 and type-1 fuzzy systems. Expert Syst. Appl. 2015, 42, 5904–5914. [Google Scholar] [CrossRef]
- Bin Peeie, M.H.; Ogino, H.; Oshinoya, Y. Skid control of a small electric vehicle with two in-wheel motors: Simulation model of ABS and regenerative brake control. Int. J. Crashworthiness 2016, 21, 396–406. [Google Scholar] [CrossRef] [Green Version]
- Yu, D.L.; Wang, W.S.; Zhang, H.B. Research on Anti-Lock Braking Control Strategy of Distributed-Driven Electric Vehicle. IEEE Access 2020, 8, 162467–162478. [Google Scholar] [CrossRef]
- Vignati, M.; Sabbioni, E. Force-based braking control algorithm for vehicles with electric motors. Veh. Syst. Dyn. 2020, 58, 1348–1366. [Google Scholar] [CrossRef]
- Wang, J.C.; He, R.; Kim, Y.-B. Optimal Anti-Lock Braking Control with Nonlinear Variable Voltage Charging Scheme for an Electric Vehicle. IEEE Trans. Veh. Technol. 2020, 69, 7211–7222. [Google Scholar] [CrossRef]
- Zhao, X.M.; Mo, H.; Yan, K.F.; Li, L.X. Type-2 fuzzy control for driving state and behavioral decisions of unmanned vehicle. IEEE-CAA J. Autom. Sin. 2020, 7, 178–186. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M.; Liang, Q.L. Type-2 fuzzy logic system. IEEE Trans. Fuzzy Syst. 1999, 7, 643–658. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.C.; Lv, L.F.; Ren, J.Y.; Chen, S.A. Time delay compensation using a Taylor series compound robust scheme for a semi-active suspension with magneto rheological damper. Asian J. Control. 2021. [CrossRef]
- Wang, J.C.; He, R.; Kim, Y.-B. Optimal control of regenerative hydraulic composite braking system based on a voltage variable charging control scheme. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2020, 234, 536–551. [Google Scholar] [CrossRef]
- Aksjonov, A.; Augsburg, K.; Vodovozov, V. Design and simulation of the robust ABS and ESP fuzzy logic controller on the complex braking maneuvers. Appl. Sci. 2016, 6, 382. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tb_i | ||||||
|---|---|---|---|---|---|---|
| NB | NS | ZE | PS | PM | ||
| e | NB | BR | BR | BR | BR | BR |
| NS | BI | BI | BI | BI | BI | |
| ZE | MI | MI | MI | MI | MI | |
| PS | SM | SM | SM | SM | SM | |
| PB | SR | SR | SR | SR | SR | |
| Variables | Values | Variables | Values |
|---|---|---|---|
| m (kg) | 960 | δ | 0 |
| A (m2) | 2.57 | Pr (MPa) | 0.375 |
| Iz (m·kg2) | 1600 | Rω (m) | 0.29 |
| Pm (MPa) | 15 | Jω (m·kg2) | 2.1 |
| Road Condition | Slip Rate (Optimal) | Coefficient (Maximum) | Coefficient (Slip Rate = 1) |
|---|---|---|---|
| Dry | 0.18 | 0.90 | 0.80 |
| Snow | 0.14 | 0.30 | 0.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, L.; Wang, J.; Long, J. Interval Type-2 Fuzzy Logic Anti-Lock Braking Control for Electric Vehicles under Complex Road Conditions. Sustainability 2021, 13, 11531. https://doi.org/10.3390/su132011531
Lv L, Wang J, Long J. Interval Type-2 Fuzzy Logic Anti-Lock Braking Control for Electric Vehicles under Complex Road Conditions. Sustainability. 2021; 13(20):11531. https://doi.org/10.3390/su132011531
Chicago/Turabian StyleLv, Linfeng, Juncheng Wang, and Jiangqi Long. 2021. "Interval Type-2 Fuzzy Logic Anti-Lock Braking Control for Electric Vehicles under Complex Road Conditions" Sustainability 13, no. 20: 11531. https://doi.org/10.3390/su132011531
APA StyleLv, L., Wang, J., & Long, J. (2021). Interval Type-2 Fuzzy Logic Anti-Lock Braking Control for Electric Vehicles under Complex Road Conditions. Sustainability, 13(20), 11531. https://doi.org/10.3390/su132011531