
Signal Control Method for Through and Left-Turn Shared Lane by Setting Left-Turn Waiting Area at Signalized Intersections


Abstract
:1. Introduction
- (1)
- A LWA design and dynamic signal optimized method for the through and left-turn shared lanes is proposed herein to solve traffic conflicts and improve the traffic efficiency at signalized intersections.
- (2)
- Both stops and delays are weighted to form an integrated performance index (PI) due to increasing stops for left-turn vehicles at LWA intersection, and the PI models pertaining to all vehicles are established to calculate the delay and stops in accuracy.
2. Method
2.1. Design of LWA
2.2. Release Design
3. Optimization Models
3.1. Optimization Objective Function
3.1.1. General Constraint Conditions
3.1.2. PI Models of LWA Intersection
- (1)
- The PI model of North-South left-turn phase
- (2)
- The PI model of North-South through phase
- (3)
- The PI model of East-West phase
3.2. Solution Algorithm
4. Case Study
4.1. Basic Conditions
4.2. Simulation Design
5. Results and Discussion
5.1. Result Analysis
5.2. Sensitivity Analysis
5.2.1. Effects of Different Arrival Numbers of Left-Turn Vehicles on PI of East-West Phase
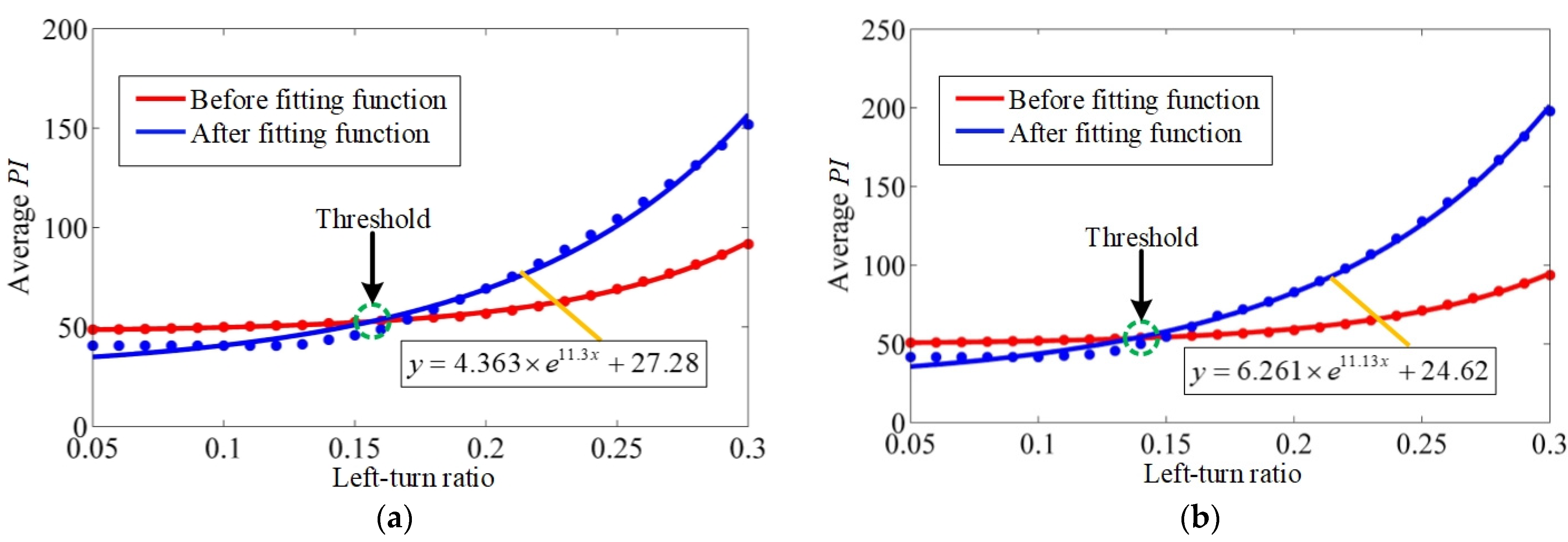
5.2.2. Effects of Different Left-Turn Ratios on PI of East-West Phase
5.2.3. Effects of Different Stop Spaces on PI of East-West Phase
6. Conclusions
- (1)
- A method to design a LWA for the through and left-turn shared lane is proposed herein, and a signal phase scheme is established to solve traffic conflicts between through and left-turn vehicles and improve the traffic efficiency at intersections.
- (2)
- Delay and stops are weighted to form an integrated PI in a real-time vehicle-to-infrastructure communication environment. The PI models, pertaining to all vehicles in the through, left-turn, and through and left-turn shared lanes are established based on the LWA intersection, and an optimized model of signal timing parameters is constructed based on minimizing the average PI per vehicle. Based on VISSIM simulation, the operational performance of the optimized model is validated using data collected at an intersection in Harbin, China.
- (3)
- Although the average PI decreases by 6.51% compared with the original layout and signal timing plan of the intersection, the delay and stop rate of the side-road left-turn vehicles increase significantly after the improvement, the resulting changes in fuel consumption and exhaust pollution are worthy of further study. Once the arrival left-turn vehicles in each cycle exceeds the stop spaces in the LWA, the through vehicle is faced with a dilemma. In this case, the issue of safety must be further investigated. In addition, the adaptability of drivers to the new traffic flow release mode needs further analysis and evaluation in application.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Z.; Liu, P.; Tian, Z.Z.; Wang, W. Evaluating the Operational Impact of Left-Turn Waiting Areas at Signalized Intersections in China. Transp. Res. Rec. J. Transp. Res. Board 2012, 2286, 12–20. [Google Scholar] [CrossRef]
- Ma, W.; Liu, Y.; Zhao, J.; Wu, N. Increasing the capacity of signalized intersections with left-turn waiting areas. Transp. Res. Part A Policy Pract. 2017, 105, 181–196. [Google Scholar] [CrossRef]
- Sun, D.Z. Using Micro-Simulation VISSIM to Study the Effectiveness of Left-Turn Waiting Area Implementation. Appl. Mech. Mater. 2018, 876, 187–191. [Google Scholar] [CrossRef]
- Yanxi, H.; Xiaoguang, Y. Research on the Delay in Signalized Intersection with Left-turn Special Phase. Procedia-Soc. Behav. Sci. 2013, 96, 2211–2218. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Zhou, Q.; Zhuang, H.; Zheng, J.; Zhang, Y. Shared-use lane assignment and signal timing optimization at intersections with wait-ing area. J. Univ. Sci. Technol. China 2020, 50, 220–235. [Google Scholar]
- Jiang, X.; Zhang, G.; Bai, W.; Fan, W. Safety evaluation of signalized intersections with left-turn waiting area in China. Accid. Anal. Prev. 2016, 95, 461–469. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, M.; Cheng, L.; Xu, G.; Zhang, G. Safety Impact Factor Analysis at Intersections with Left-Turn Waiting Areas Based on Ordered Logit Model. In CICTP 2017: Transportation Reform and Change—Equity, Inclusiveness, Sharing, and Innovation; American Society of Civil Engineers: Reston, VA, USA, 2018; pp. 4640–4649. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, P.; Chen, Y.; Yu, H. Can Left-turn Waiting Areas Improve the Capacity of Left-turn Lanes at Signalized Intersections? Procedia-Soc. Behav. Sci. 2012, 43, 192–200. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Liu, P.; Tian, Z.Z.; Wang, W. Effects of Left-Turn Waiting Areas on Capacity and Level of Service of Signalized Intersections. J. Transp. Eng. 2013, 139, 1076–1085. [Google Scholar] [CrossRef]
- Dong, S.; Yang, Z.; Xu, C.; Tian, Z.Z.; Liu, P. Multiobjective Evaluation of Left-Turn Waiting Areas at Signalized Intersections in China. Transp. Res. Rec. J. Transp. Res. Board 2016, 2553, 138–149. [Google Scholar] [CrossRef]
- Wu, J.; Liu, P.; Tian, Z.Z.; Xu, C. Operational analysis of the contraflow left-turn lane design at signalized intersections in China. Transp. Res. Part C Emerg. Technol. 2016, 69, 228–241. [Google Scholar] [CrossRef]
- Su, P.; Krause, C.; Hale, D.K.; Bared, J.; Huang, Z. Operational Advantages of Contraflow Left-turn Pockets at Signalized Inter-sections. ITE J.-Inst. Transp. Eng. 2016, 86, 44–49. [Google Scholar]
- Zhao, Y.; James, R.M.; Xiao, L.; Bared, J. A Capacity Estimation Model for a Contraflow Left-Turn Pocket Lane at Signalized Intersections. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 22–34. [Google Scholar] [CrossRef]
- Bai, Q.-W.; Chen, Y.-H.; Qu, Z.-W.; Tao, P.-F.; Cao, N.-B.; Shen, Y. Nonstrict Priority Left-Turning Maneuvers with a Permitted Phase at Signalized Intersections: Empirical Study in China. J. Transp. Eng. Part A Syst. 2017, 143, 04016009. [Google Scholar] [CrossRef]
- Rathod, J.; Rumpsa, K.; Qureshi, M. A Volume Warrant for the Permitted Phase of Protected-permitted Phasing. In Proceedings of the ITE 2007 Annual Meeting and Exhibit, Pittsburgh, PA, USA, 5–8 August 2007. [Google Scholar]
- Qu, Z.W.; Bai, Q.W.; Chen, Y.H.; Cao, N.B.; Kang, M.; Wei, F.L. Model of left-turn guide line at right-angled intersection with permitted left-turning phase. J. Jilin Univ. (Eng. Tech. Ed.) 2017, 47, 414–419. [Google Scholar]
- Yang, Q.; Shi, Z.; Yu, S.; Zhou, J. Analytical evaluation of the use of left-turn phasing for single left-turn lane only. Transp. Res. Part B Methodol. 2018, 111, 266–303. [Google Scholar] [CrossRef]
- Abou-Senna, H.; Radwan, E.; Harb, R.C.; Navarro, A.; Chalise, S. Interactive Decision Support System for Predicting Flashing Yellow Arrow Left-Turn Mode by Time of Day. Transp. Res. Rec. J. Transp. Res. Board 2014, 2463, 16–25. [Google Scholar] [CrossRef]
- Bie, Y.; Liu, Z. Evaluation of a Signalized Intersection with Hook Turns under Traffic Actuated Control Circumstance. J. Transp. Eng. 2015, 141, 04014093. [Google Scholar] [CrossRef]
- Currie, G.; Reynolds, J. Managing Trams and Traffic at Intersections with Hook Turns. Transp. Res. Rec. J. Transp. Res. Board 2011, 2219, 10–19. [Google Scholar] [CrossRef]
- Hounsell, N.B.; Yap, Y.H. Hook Turns as a Solution to the Right-Turning Traffic Problem. Transp. Sci. 2015, 49, 1–162. [Google Scholar] [CrossRef]
- Cheng, W.; Bie, Y.; Liu, Z. Signal control scheme optimization method for intersection with Hook-turn based on motor vehi-cle delay. Zhongguo Gonglu Xuebao/China J. Highw. Transp. 2015, 28, 94–101. [Google Scholar]
- Bie, Y.; Liu, Z.; Lu, L.; Cao, Y. A Signal Coordination Algorithm for Adjacent Hook-turn Intersections. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 11–15 November 2015. [Google Scholar]
- Warner, J.; Hurwitz, D.S.; Monsere, C.M.; Fleskes, K. A simulator-based analysis of engineering treatments for right-hook bicycle crashes at signalized intersections. Accid. Anal. Prev. 2017, 104, 46–57. [Google Scholar] [CrossRef]
- Bie, Y.; Cheng, S.; Liu, Z. Optimization of Signal-Timing Parameters for The Intersection With Hook Turns. Transport 2017, 32, 233–241. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Li, X.S.; Ren, Y.Y. Adaptive signal control method for intersection with hook-turn buses. J. Jilin Univ. (Eng. Tech. Ed.) 2018, 48, 423–429. [Google Scholar]
- Moridpour, S.; Falamarzi, A. Hook Turns: Implementation, Benefits, and Limitations. Int. Encycl. Transp. 2021, 203–212. [Google Scholar] [CrossRef]
- Jiang, X.; Gao, S. Signal control method and performance evaluation of an improved displaced left-turn intersection design in unsaturated traffic conditions. Transp. B Transp. Dyn. 2020, 8, 264–289. [Google Scholar] [CrossRef]
- Cai, C.; Wong, C.; Heydecker, B.G. Adaptive traffic signal control using approximate dynamic programming. Transp. Res. Part C Emerg. Technol. 2009, 17, 456–474. [Google Scholar] [CrossRef] [Green Version]
- Zhu, S.; Guo, K.; Guo, Y.; Tao, H.; Shi, Q. An Adaptive Signal Control Method with Optimal Detector Locations. Sustainability 2019, 11, 727. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | East | West | North | South | |
|---|---|---|---|---|---|
| Time | |||||
| Peak hour | 70/274/74 | 85/302/92 | 147/628/170 | 145/653/186 | |
| Scheme | North-South Left-Turn | North-South Through | East-West Left-Turn | East-West Through | All |
|---|---|---|---|---|---|
| Scheme 1 | 50.5 | 47.2 | 44.6 | 31.3 | 38.4 |
| Scheme 2 | 61.8 | 45.1 | 44.3 | 30.0 | 38.0 |
| Scheme 3 | 58.3 (↑15.45%) | 42.3 (↓10.38%) | 40.6 (↓8.97%) | 28.0 (↓10.54%) | 35.9 (↓6.51%) |
| Scheme | North-South Left-Turn | North-South Through | East-West Left-Turn | East-West Through | All |
|---|---|---|---|---|---|
| Scheme 1 | 42.8 | 39.7 | 37.4 | 26.3 | 32.6 |
| Scheme 2 | 53.2 | 37.8 | 37.1 | 25.2 | 32.2 |
| Scheme 3 | 50.1 (↑17.06%) | 35.5 (↓10.58%) | 33.9 (↓9.36%) | 23.4 (↓11.03%) | 30.1 (↓7.67%) |
| Scheme | North-South Left-Turn | North-South Through | East-West Left-Turn | East-West Through | All |
|---|---|---|---|---|---|
| Scheme 1 | 1.91 | 1.87 | 1.8 | 1.24 | 1.45 |
| Scheme 2 | 2.15 | 1.8 | 1.8 | 1.2 | 1.44 |
| Scheme 3 | 2.05 (↑7.33%) | 1.71 (↓8.56%) | 1.67 (↓7.22%) | 1.15 (↓7.26%) | 1.36 (↓6.21%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Yao, L.; Jin, Y.; Wu, R. Signal Control Method for Through and Left-Turn Shared Lane by Setting Left-Turn Waiting Area at Signalized Intersections. Sustainability 2021, 13, 13154. https://doi.org/10.3390/su132313154
Jiang X, Yao L, Jin Y, Wu R. Signal Control Method for Through and Left-Turn Shared Lane by Setting Left-Turn Waiting Area at Signalized Intersections. Sustainability. 2021; 13(23):13154. https://doi.org/10.3390/su132313154
Chicago/Turabian StyleJiang, Xiancai, Li Yao, Yao Jin, and Runting Wu. 2021. "Signal Control Method for Through and Left-Turn Shared Lane by Setting Left-Turn Waiting Area at Signalized Intersections" Sustainability 13, no. 23: 13154. https://doi.org/10.3390/su132313154
APA StyleJiang, X., Yao, L., Jin, Y., & Wu, R. (2021). Signal Control Method for Through and Left-Turn Shared Lane by Setting Left-Turn Waiting Area at Signalized Intersections. Sustainability, 13(23), 13154. https://doi.org/10.3390/su132313154