
Application of Artificial Neural Networks to Streamline the Process of Adaptive Cruise Control


Abstract
:1. Introduction
- design of a completely original hierarchical neural network representing the control core of adaptive cruise control;
- application of neural networks to determine the deceleration value of a vehicle in front of a static or dynamic obstacle based on traditional and non-traditional input factors that affect the braking process;
- at the same time, it is another presentation of the use of artificial neural networks and modern sensors on the way to full vehicle autonomy.
2. The Impact of New Technologies on Sustainability in Cars
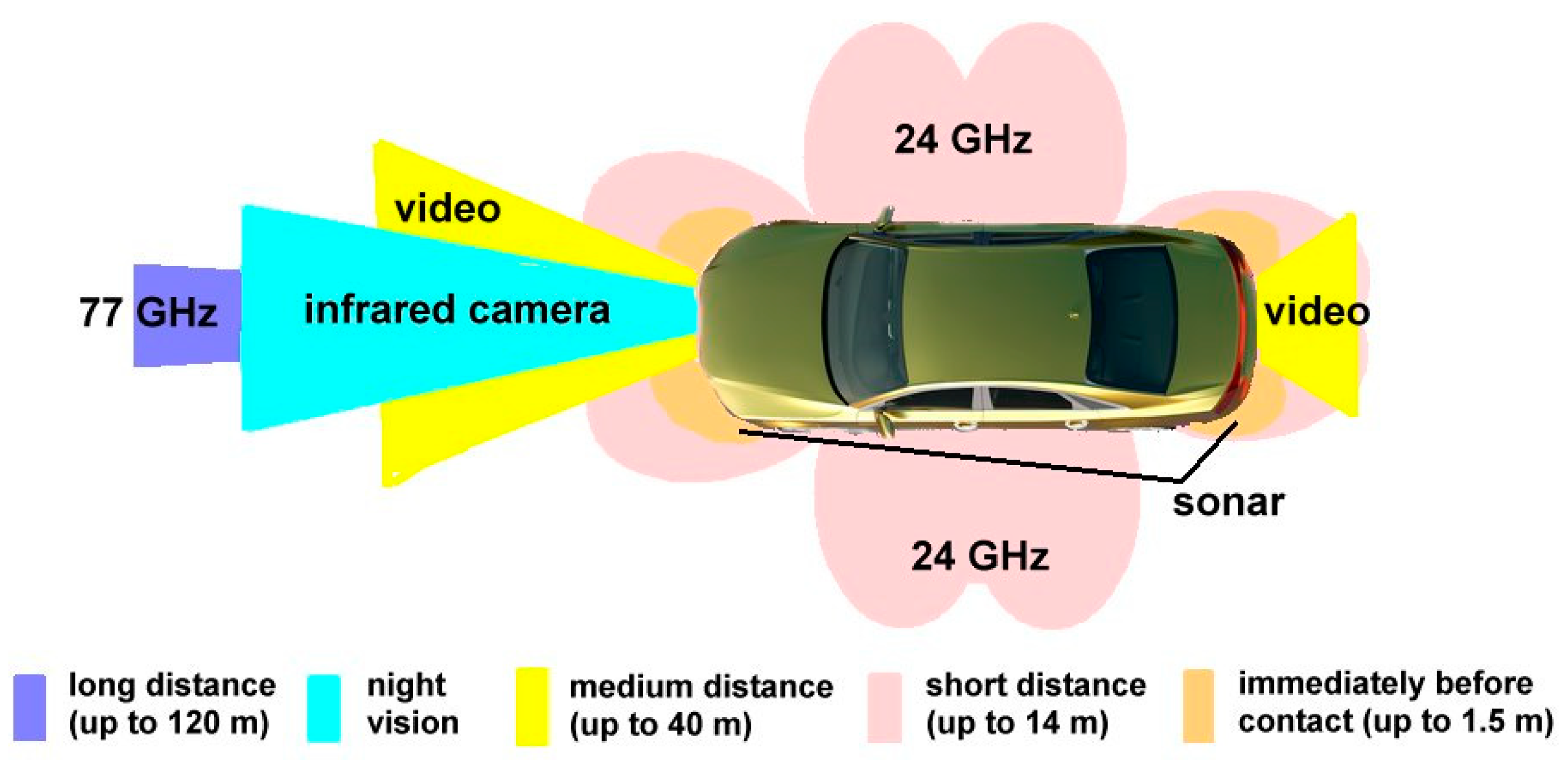
3. Assistance Systems in Cars
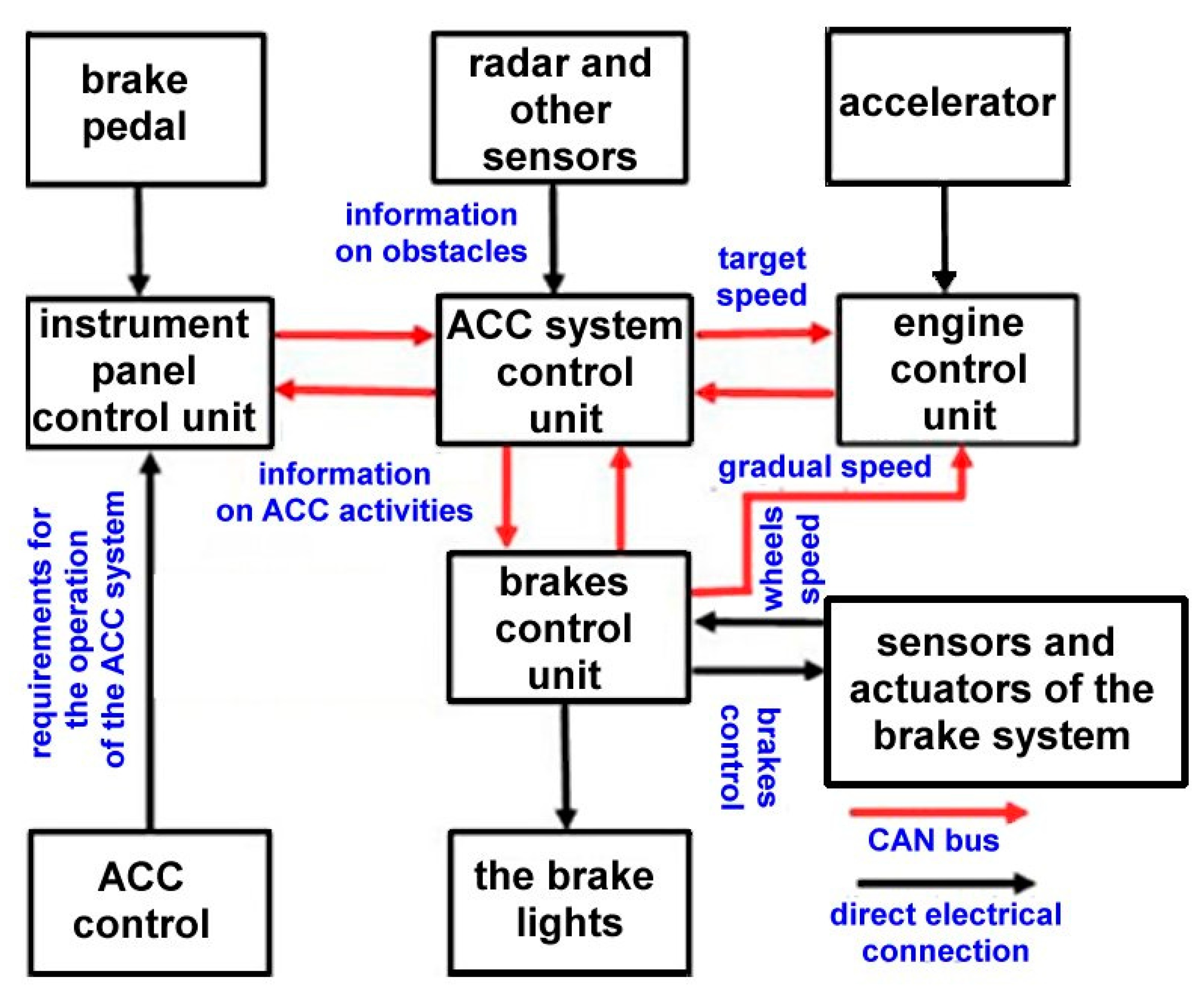
3.1. Adaptive Cruise Control
- It maintains a constant speed on empty communication. The ACC then works as a classic controller, sending a setpoint of engine speed to the engine control unit in a car with an automatic transmission.
- If a moving obstacle is identified (a car traveling in the same lane at a lower speed), the ACC moves the car to a preset distance, adapts its speed to the car in front and follows it, including in convoys and city traffic.
- In the case of identification of a stationary obstacle (parked car), the ACC system gradually decreases the speed, so it stops at the optimal distance in front of it.
- If an obstacle is identified late or suddenly appears in front of the car and the distance from it is shorter than the distance for gradual stopping, the ACC system activates anti-collision systems.
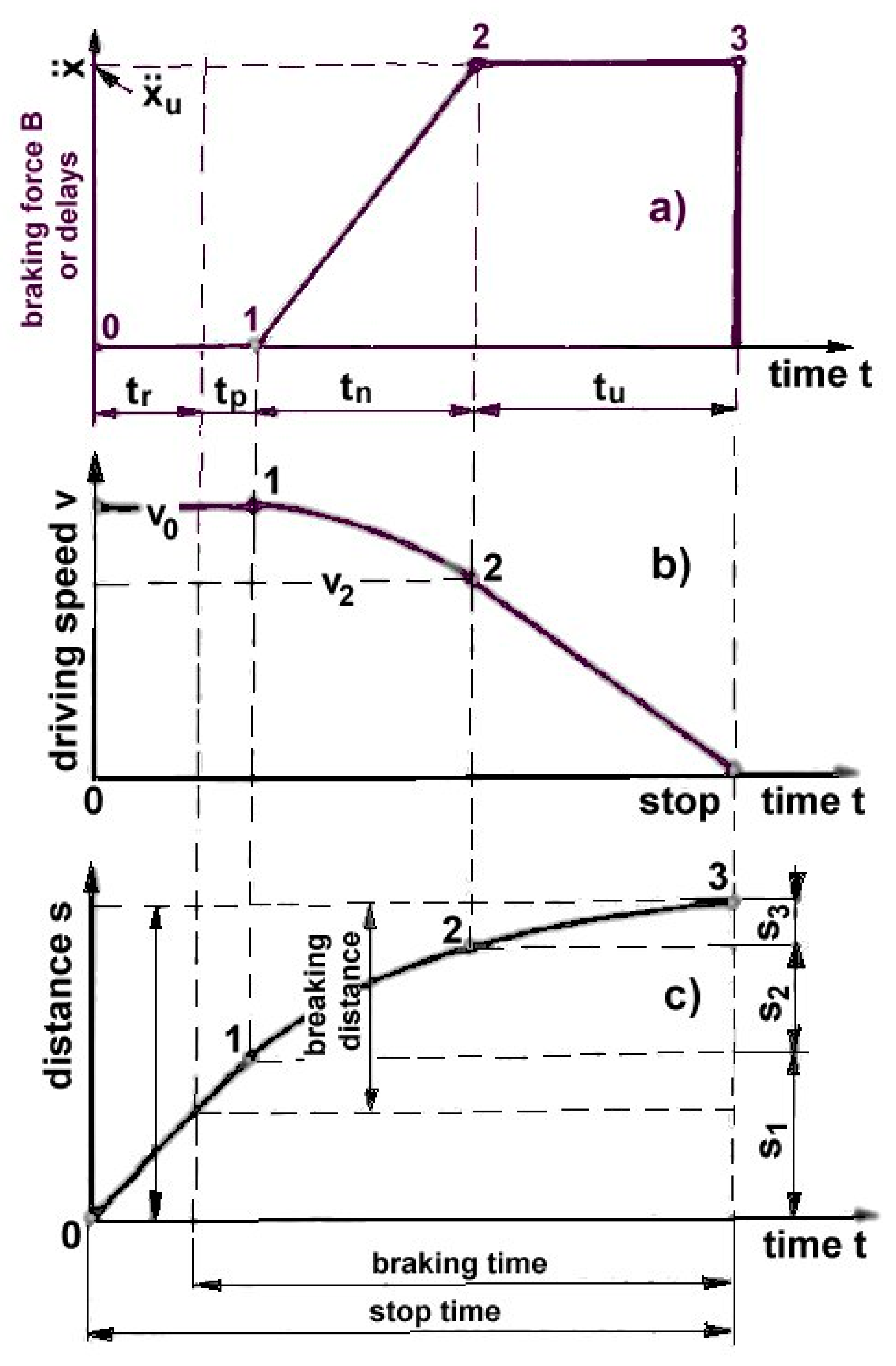
3.2. Braking
4. Mathematical Model of Vehicle Movement
- law of inertia;
- law of force;
- energy;
- momentum;
- momentum (rotation).
5. Use of Neural Networks to Support ACC Control
5.1. Adhesion
- Efficiency of vehicle brakes. Therefore, a road with extremely good anti-skid properties will make the road rougher than usual, saving nothing if the brakes are ineffective (greasy or otherwise broken) on the vehicle. In this case, the anti-slip qualities of the road surface cannot be used.
- Tire adhesion on the road. Extraordinary effectiveness of the brakes does not save anything on slippery roads (wet, extremely smooth, muddy or icy). In this case, the effectiveness of the brakes simply cannot be used, even if the passenger car has brakes from a large transport aircraft.
- adhesive requirements;
- adhesion options.
- adhesion—primary influence (molecular bonds);
- hysteresis components (tire deformation);
- viscous components (liquid layers in the contact area);
- cohesive components (loss of abrasion energy) [39].
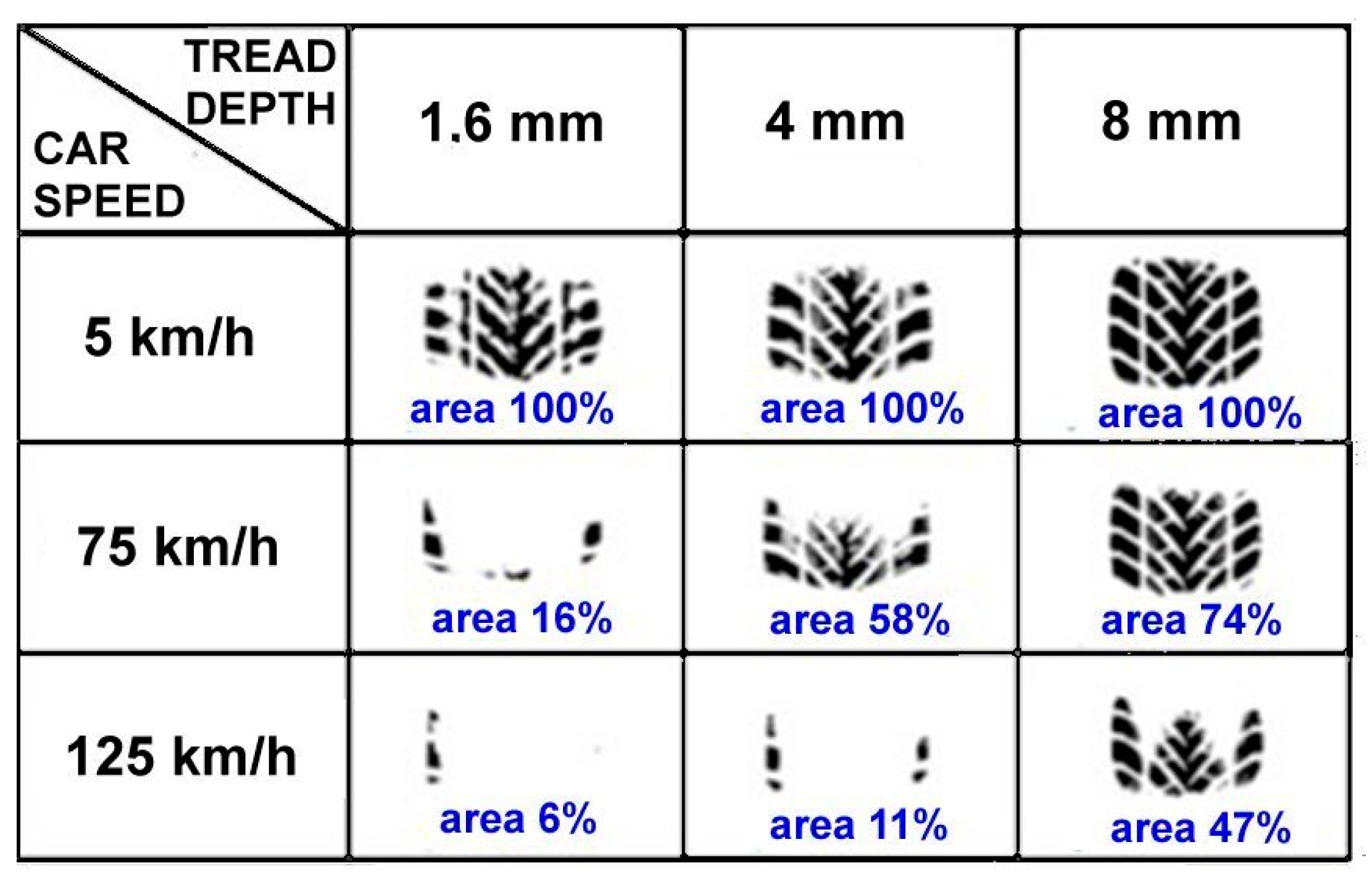
- the quality of the compound and the condition of the tire surface;
- vehicle speed;
- conditions that are in the wheel track, mainly on the slip (slip—the rotation of the wheel is slower than the corresponding actual speed of the vehicle).
- a is the achievable deceleration in m⋅s−2;
- u is the adhesion weight ratio or braking efficiency (when all wheels of the vehicle are locked u = 1.000);
- f is the coefficient of friction (adhesion), dimensionless value;
- s is the slope of the road in the direction of movement of the vehicle in percent (positive incline, negative descent);
- g is the magnitude of the gravitational acceleration g = 9.81 m⋅s−2.
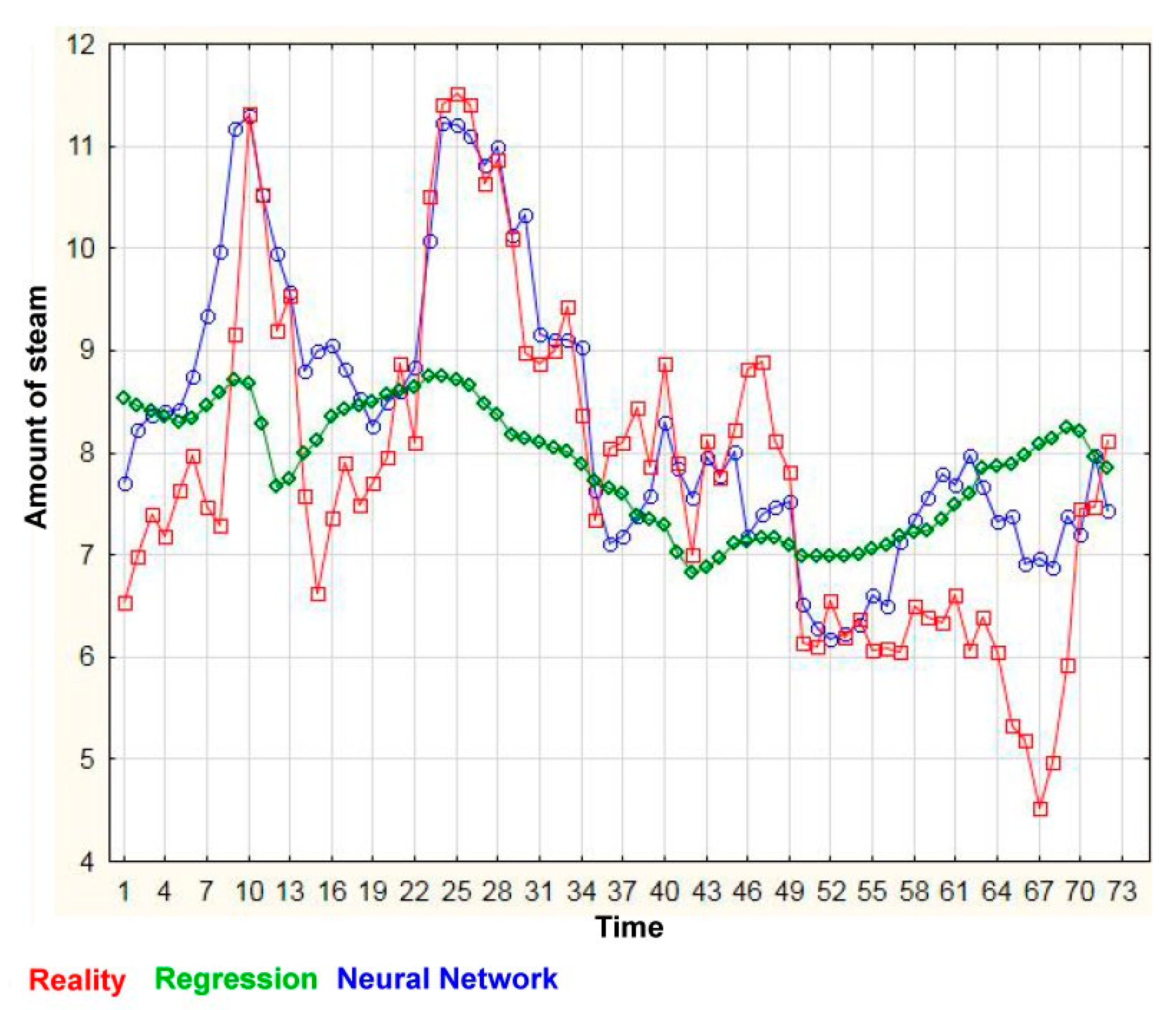
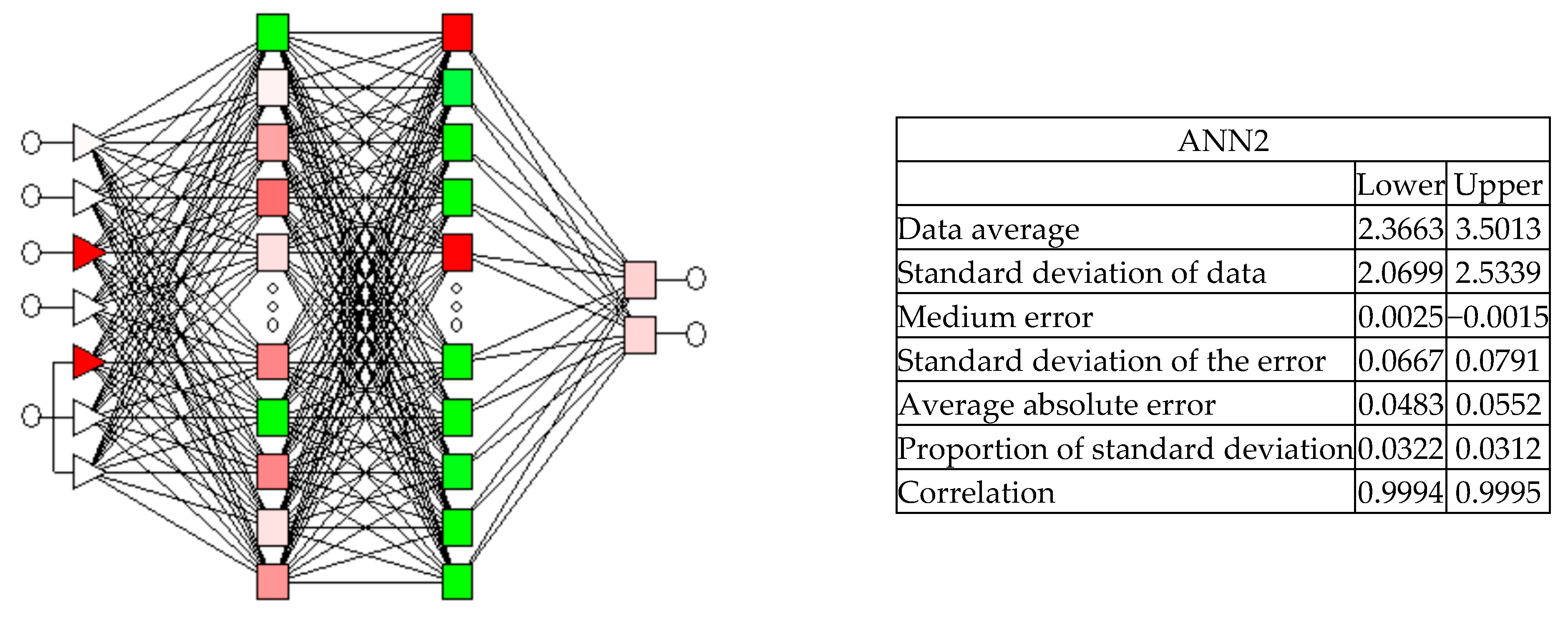
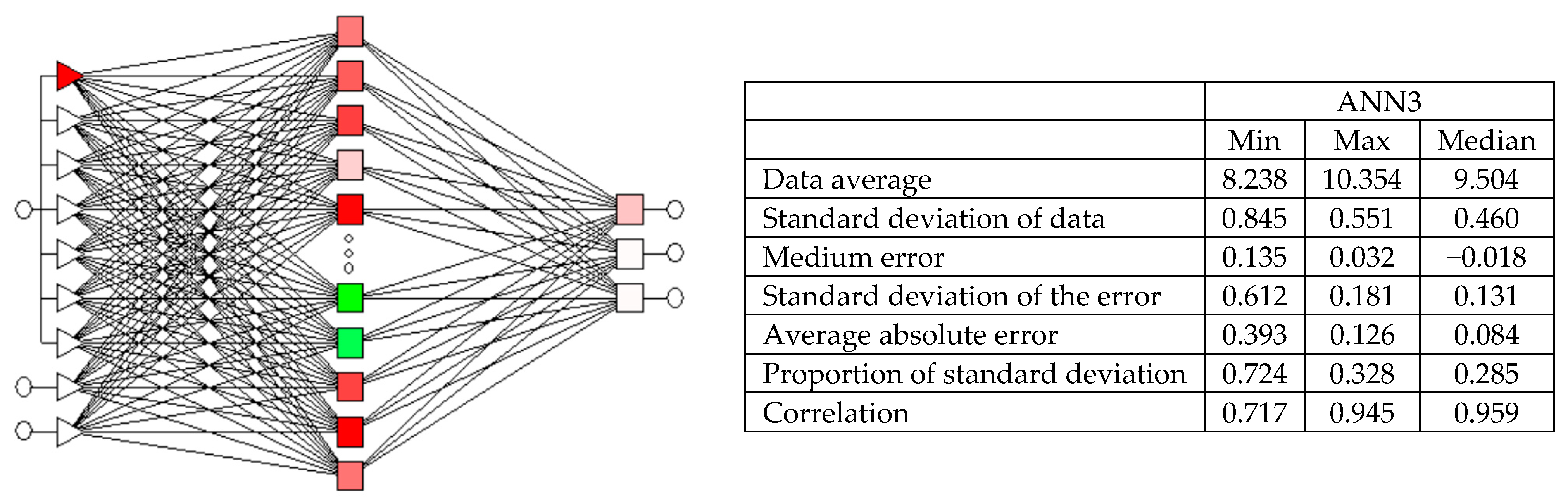
5.2. ACC Control Support Model Using Hierarchical Neural Networks
- Exceptional ease of use combined with surprising analytical performance; the automatic network finder guides the user step by step through the process of creating a group of different networks and selecting the most appropriate network with the best performance (a task that would otherwise require a lengthy “trial and error” procedure with a solid knowledge of basic theory).
- Integrated pre and post-processing including data selection, nominal coding, scaling, normalization and replacement of missing values with interpretation for classification, regression and time series issues.
- Advanced, highly optimized training algorithms, including the conjugate gradient method and the Broyden–Fletcher–Goldfarb–Shanno (BFGS) method; full control over all aspects that affect the behavior of the neural network, such as activation and error function or network complexity.
- Support for combinations of networks and network architectures of virtually unlimited size organized in sets of neural networks for creating collections.
- Comprehensive graphical and statistical feedback providing interactive exploratory analyses.
- Full integration within the STATISTICA system; all results, graphs, reports, etc. can be further modified using the graphical and analytical tools of the STATISTICA system. It is thus possible, for example, to perform further residue analyses, create annotated summary reports, etc.
- Full integration with STATISTICA automation tools; the user can use complete macros for all analyses, program his own analyses using a neural network in the STATISTICA Visual Basic environment or call the STATISTICA Automated Neural Network system from any COM-enabled application (Component Object Model). It can, for example, automatically perform analyses with neural networks in MS Excel tables or include neural network procedures in its own applications developed in C, C++, C#, Java, etc.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Šabanovič, E.; Žuraulis, V.; Prentkovskis, O.; Skrickij, V. Identification of Road-Surface Type Using Deep Neural Networks for Friction Coefficient Estimation. Sensors 2020, 20, 612. [Google Scholar] [CrossRef] [Green Version]
- Andrades, I.S.; Castillo Aguilar, J.J.; García, J.M.V.; Carrillo, J.A.C.; Lozano, M.S. Low-Cost Road-Surface Classification System Based on Self-Organizing Maps. Sensors 2020, 20, 6009. [Google Scholar] [CrossRef] [PubMed]
- Varona, B.; Monteserin, A.; Teyseyre, A. A deep learning approach to automatic road surface monitoring and pothole detection. Pers. Ubiquit. Comput. 2020, 24, 519–534. [Google Scholar] [CrossRef]
- Cach, T. Udržitelná Mobilita (1 a 2). Available online: https://auto-mat.cz/19861/udrzitelna-mobilita-13-uvod-do-udrzitelne-mobility; https://auto-mat.cz/20391/udrzitelna-mobilita-23-dopravni-indukce-a-redukce (accessed on 20 December 2020).
- Dimil, J.; Pasad, S.; Sridhar, V.G. Intelligent Vehicle Monitoring Using Global Positioning System and Cloud Computing. Procedia Comput. Sci. 2015, 50, 440–446. [Google Scholar]
- Future Structure, Government Technology. Idaho, Where Self-Driving Vehicles Aren’t Currently Allowed, Forms Committee to Study Them. Available online: https://www.govtech.com/fs/Idaho-Where-Self-Driving-Vehicles-Arent-Currently-Allowed-Forms-Committee-to-Study-Them.html (accessed on 7 January 2020).
- Pandiyan, P.; Kiruthikamani, G.; Sarany, A.B. Intelligent Driver Monitoring and Vehicle Control System. Int. J. Sci. Res. 2017, 5, 851–853. [Google Scholar]
- Jones, W.D. Keeping cars from crashing. IEEE Spectr. 2001, 38, 40–45. [Google Scholar] [CrossRef]
- Favaró, F.; Nader, N.; Eurich, S.; Tripp, M.; Varadaraju, N. Examining accident reports involving autonomous vehicles in California. PLoS ONE 2017, 12, e0184952. [Google Scholar] [CrossRef]
- Vysoký, P. Asistenční systémy v automobilech. Automa 2005, 12, 2005. [Google Scholar]
- Dusil, T. Adaptivní Tempomat: Jak Funguje? Jaké Známe Druhy? Auto.cz. 2017. Available online: https://www.auto.cz/adaptivni-tempomat-jak-funguje-a-jake-zname-druhy-104364 (accessed on 5 January 2020).
- American Automobile Association, Inc. Automatic Emergency Braking with Pedestrian Detection. AAA NewsRoom. 2019. Available online: https://www.aaa.com/AAA/common/aar/files/Research-Report-Pedestrian-Detection.pdf (accessed on 12 January 2020).
- Jansson, J.; Johansson, J.; Gustafsson, F. Decision Making for Collision Avoidance Systems . SAE Paper 2002-01-0403. 2002. Available online: https://www.sae.org/publications/technical-papers/content/2002-01-0403/ (accessed on 12 January 2020).
- Wang, B.; Zhao, D.; Cheng, J. Adaptive cruise control via adaptive dynamic programming with experience replay. Soft Comput. 2019, 23, 4131–4144. [Google Scholar] [CrossRef]
- Wan, L.; Su, Y.; Zhang, H.; Tang, Y.; Shi, B. Neural adaptive sliding mode controller for unmanned surface vehicle steering system. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhang, J. Neural Network Optimized Model Predictive Multi-Objective Adaptive Cruise Control. In Proceedings of the 2nd International Conference on Mechanical, Aeronautical and Automotive Engineering (ICMAA 2018) Book Series: MATEC Web of Conferences; Amir, H.F.A., Swee, S.K., Eds.; EDP Sciences: Paris, France, 2018; Volume 166, p. 01009. [Google Scholar]
- Lee, D.; Kwon, Y.P.; Mcmains, S.; Hedrick, J.K. Convolution Neural Network-based Lane Change Intention Prediction of Surrounding Vehicles for ACC. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Kuyumcu, A.; Sengor, N.S. Effect of Neural Controller on Adaptive Cruise Control. In Proceedings of the Artificial Neural Networks and Machine Learning—ICANN 2016, Barcelona, Spain, 6–9 September 2016; Villa, A.E.P., Masulli, P., Rivero, A.J.P., Eds.; Lecture Notes in Computer Science; Springer: New York, NY, USA, 2016; Volume 9887, pp. 515–522. [Google Scholar]
- Zhao, D.; Hu, Z.; Xia, Z.; Alippi, C.; Zhu, Y.; Wang, D. Full-range adaptive cruise control based on supervised adaptive dynamic programming. Neurocomputing 2014, 125, 57–67. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, B.; Liu, D. A supervised Actor-Critic approach for adaptive cruise control. Soft Comput. 2013, 17, 2089–2099. [Google Scholar] [CrossRef]
- Suresh, P.; Manivannan, P. Neural Network Based Hybrid Adaptive Controller for an Autonomously driving Car using Thin Plate Spline Radial Basis Activation Function. In Applied Mechanics and Materials; Balasubramanian, K.R., Sivapirakasam, S.P., Anand, R., Eds.; Dynamics of Machines and Mechanisms, Industrial Research; Trans Tech Publications: Zurich, Switzerland, 2014; Volume 592–594, pp. 2184–2188. [Google Scholar]
- Bifulco, G.; Simonelli, F.; Di Pace, R. Experiments toward an human-like Adaptive Cruise Control. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; Volume 1–3, pp. 528–533. [Google Scholar]
- Huang, S.; Tan, K.; Lee, T. Autonomous cruise control using neural networks in platooning. Adv. Robot. 2005, 19, 169–189. [Google Scholar] [CrossRef]
- Ohno, H. Analysis and modeling of human driving behaviors using adaptive cruise control. In Proceedings of the IECON 2000: 26th Annual Conference of the IEEE Industrial Electronics Society, Nagoya, Japan, 22–28 October 2000; Volume 1–4, pp. 2803–2808. [Google Scholar]
- Dong, C.; Wang, H.; Li, Y.; Shi, X.; Ni, D.; Wang, W. Application of machine learning algorithms in lane-changing model for intelligent vehicles exiting to off-ramp. Transp. A Transp. Sci. 2021, 17, 124–150. [Google Scholar] [CrossRef]
- Mahadika, P.; Subiantoro, A.; Kusumoputro, B. Neural Network Predictive Control Approach Design for Adaptive Cruise Control. Int. J. Technol. 2020, 11, 1451–1462. [Google Scholar] [CrossRef]
- Kalkkuhl, J.; Hunt, K.J.; Fritz, H. FEM-based neural-network approach to nonlinear modeling with application to longitudinal vehicle dynamics control. IEEE Trans. Neural Netw. 1999, 10, 885–897. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Zhang, D.; Li, K. An adaptive longitudinal driving assistance system based on driver characteristics. IEEE Trans. Intell. Transp. Syst. 2012, 14, 1–12. [Google Scholar] [CrossRef]
- Eski, I.; Yildirim, S. Neural network-based fuzzy inference system for speed control of heavy duty vehicles with electronic throttle control system. Neural Compu. Appl. 2017, 28, S907–S916. [Google Scholar] [CrossRef]
- Jose, D.; Nirmal, K.P.; Arfath, H.A. Fault Tolerant Adaptive Neuro-Fuzzy Based Automated Cruise Controller on FPGA. In Proceedings of the 2013 Annual IEEE India Conference (INDICON), Mumbai, India, 13–15 December 2013. [Google Scholar]
- Lu, P. Car cruising system incorporating ART-FNN man-machine interface in adaptation to various driving behaviors. Int. J. Comput. Appl. Technol. 1999, 12, 160–173. [Google Scholar] [CrossRef]
- Yan, M.; Song, J.; Zuo, L.; Yang, P. Neural Adaptive Sliding-Mode Control of a Vehicle Platoon Using Output Feedback. Energies 2017, 10, 1906. [Google Scholar]
- Zhao, D.; Xia, Z. Adaptive Optimal Control for the Uncertain Driving Habit Problem in Adaptive Cruise Control System. In Proceedings of the 2013 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Dongguan, China, 28–30 July 2013; pp. 159–164. [Google Scholar]
- Lin, Y.C.; Nguyen, H.L.; Wang, C.H. Adaptive Neuro-Fuzzy Predictive Control for Design of Adaptive Cruise Control System. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC 2017), Calabria, Italy, 16–18 May 2017; Fortino, G., Zhou, M.C., Lukszo, Z., Vasilakos, A.V., Basile, F., Palau, C., Liotta, A., Fanti, M.P., Guerrieri, A., Vinci, A., Eds.; IEEE: Calabria, Italy, 2017; pp. 767–772. [Google Scholar]
- Simonelli, F.; Bifulco, G.N.; De Martinis, V.; Punzo, V. Human-Like Adaptive Cruise Control Systems through a Learning Machine Approach. In Applications of Soft Computing: Updating the State of the Art; Avineri, E., Koppen, M., Dahal, K., Sunitiyoso, Y., Roy, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 52, pp. 240–249. [Google Scholar]
- Xing, L.; He, J.; Li, Y.; Wu, Y.; Yuan, J.; Gu, X. Comparison of different models for evaluating vehicle collision risks at upstream diverging area of toll plaza. Accid. Anal. Prev. 2020, 135, 105343. [Google Scholar] [CrossRef] [PubMed]
- Desjardins, C.; Chaib-Draa, B. Cooperative Adaptive Cruise Control: A Reinforcement Learning Approach. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1248–1260. [Google Scholar] [CrossRef]
- Kuman, U.A. Comparison of neural networks and regression analysis: A new insight. Expert Syst. Appl. 2005, 29, 424–430. [Google Scholar]
- Dreiseitla, S.; Ohno-Machado, L. Logistic regression and artificial neural network classification models: A methodology review. J. Biomed. Inform. 2002, 35, 352–359. [Google Scholar] [CrossRef] [Green Version]
- Pařízková, I. Modelování a simulace v oblasti odpadového hospodářství (Modelling and Simulation in the Field of Waste Management). Bachelor’s Thesis, VUT Brno, Brno, Czech Republic, 2014. [Google Scholar]
- Vlk, F. Elektronické systémy motorových vozidel. Soudní Inženýrství 2005, 19, 193–212. [Google Scholar]
- Semela, M. Analýza Silničních Nehod I; VUT Brno: Brno, Czech Republic, 2014. [Google Scholar]
- Toufar, P. Vliv Parametrů a Vlastností Pneumatik na Jízdní Dynamiku Vozidel; VUT Brno: Brno, Czech Republic, 2011. [Google Scholar]
- Vlk, F. Dynamika Motorových Vozidel; F. Vlk: Brno, Czech Republic, 2000; ISBN 80-238-5273-6. [Google Scholar]
- Bradáč, A. Příručka Znalce I. a II.: Analytika Silničních Nehod. PN. 60/858 A/85; Dům Techniky ČSVTS: Ostrava, Czech Republic, 1985; p. 544. [Google Scholar]
- How to Calculate Braking Distances. Available online: https://www.drivingtests.co.nz/resources/how-to-calculate-braking-distances/ (accessed on 23 March 2020).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Surface | µ | Road Surface | µ | ||
|---|---|---|---|---|---|
| Concrete | dry | 0.8–1.0 | Dirt road | dry | 0.4–0.6 |
| wet | 0.5–0.8 | wet | 0.3–0.4 | ||
| Asphalt | dry | 0.6–0.9 | Grass | dry | 0.4–0.6 |
| wet | 0.3–0.8 | wet | 0.2–0.5 | ||
| Paving | dry | 0.6–0.9 | Deep sand. snow | 0.2–0.4 | |
| wet | 0.3–0.5 | Slippery ice | 0 °C | 0.05–0.10 | |
| Macadam | dry | 0.6–0.8 | −10 °C | 0.08–0.15 | |
| wet | 0.3–0.5 | −20 °C | 0.15–0.20 | ||
| Spring | Summer | Autumn | Winter | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Month | III. | IV. | V. | VI. | VII. | VIII. | IX. | X. | XI. | XII. | I. | II. |
| Asphalt. | 0.87 | 0.88 | 0.92 | 0.98 | 1.00 | 1.00 | 0.96 | 0.90 | 0.87 | 0.86 | 0.86 | 0.87 |
| Concrete | 0.92 | 0.94 | 0.96 | 0.99 | 1.00 | 1.00 | 0.97 | 0.92 | 0.92 | 0.91 | 0.91 | 0.91 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
David, J.; Brom, P.; Starý, F.; Bradáč, J.; Dynybyl, V. Application of Artificial Neural Networks to Streamline the Process of Adaptive Cruise Control. Sustainability 2021, 13, 4572. https://doi.org/10.3390/su13084572
David J, Brom P, Starý F, Bradáč J, Dynybyl V. Application of Artificial Neural Networks to Streamline the Process of Adaptive Cruise Control. Sustainability. 2021; 13(8):4572. https://doi.org/10.3390/su13084572
Chicago/Turabian StyleDavid, Jiří, Pavel Brom, František Starý, Josef Bradáč, and Vojtěch Dynybyl. 2021. "Application of Artificial Neural Networks to Streamline the Process of Adaptive Cruise Control" Sustainability 13, no. 8: 4572. https://doi.org/10.3390/su13084572
APA StyleDavid, J., Brom, P., Starý, F., Bradáč, J., & Dynybyl, V. (2021). Application of Artificial Neural Networks to Streamline the Process of Adaptive Cruise Control. Sustainability, 13(8), 4572. https://doi.org/10.3390/su13084572