
Indoor Distance Measurement System COPS (COVID-19 Prevention System)


Abstract
:1. Introduction
2. Related Work
2.1. Object Detection
2.2. Multiple Object Tracking
2.3. Indoor Object Distance Measurement
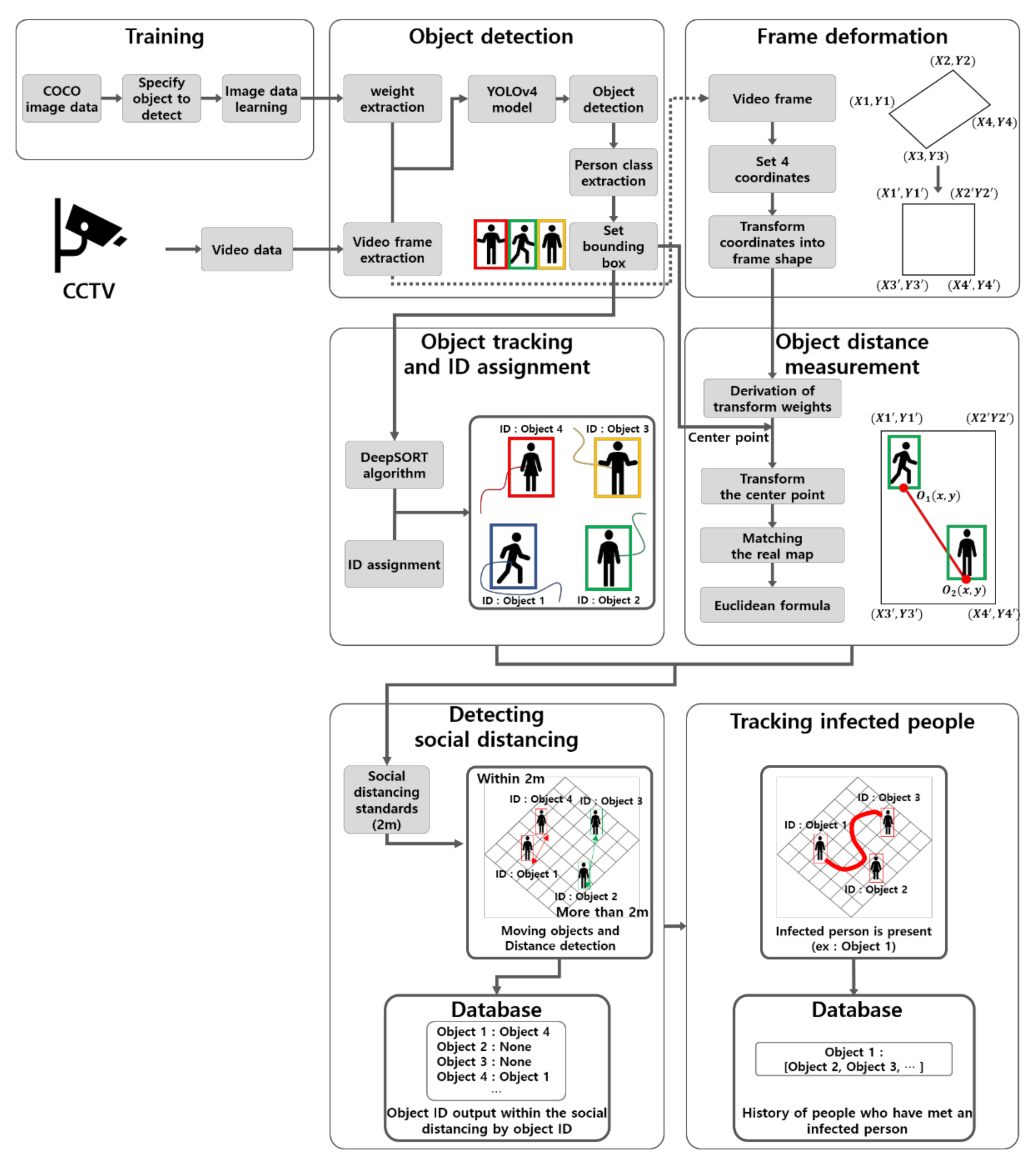
3. System Overview
4. System Implementation Method
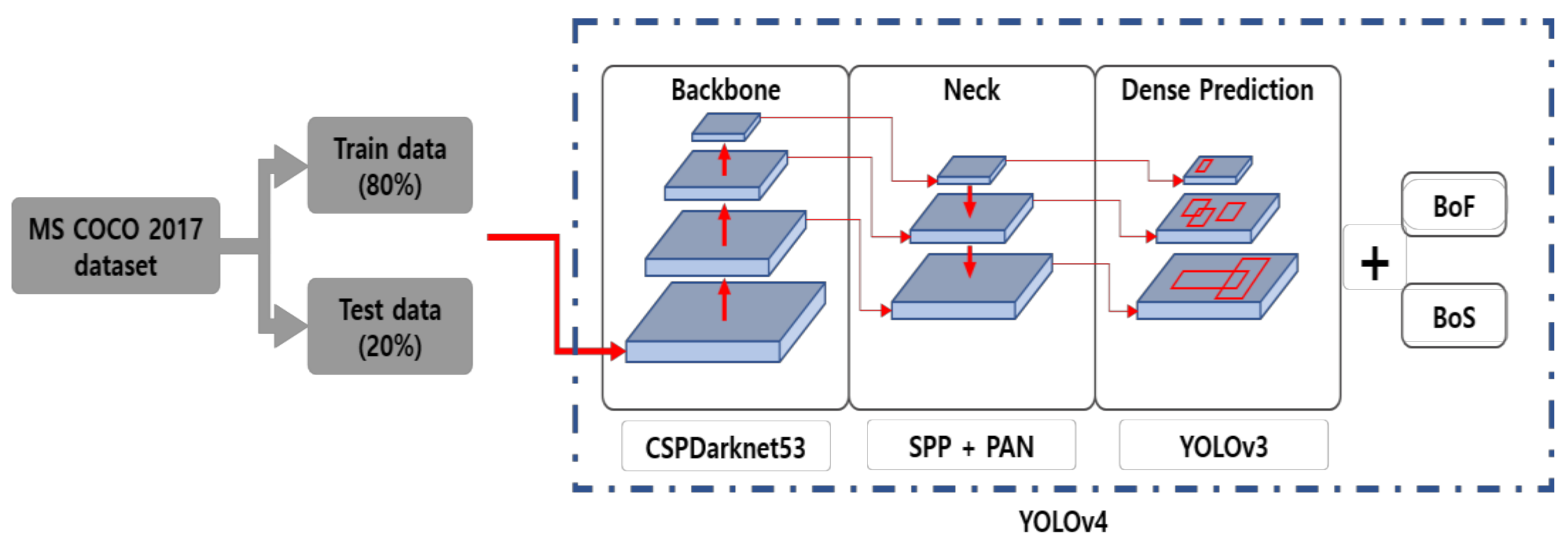
4.1. Image Data Training
4.2. Object Detection
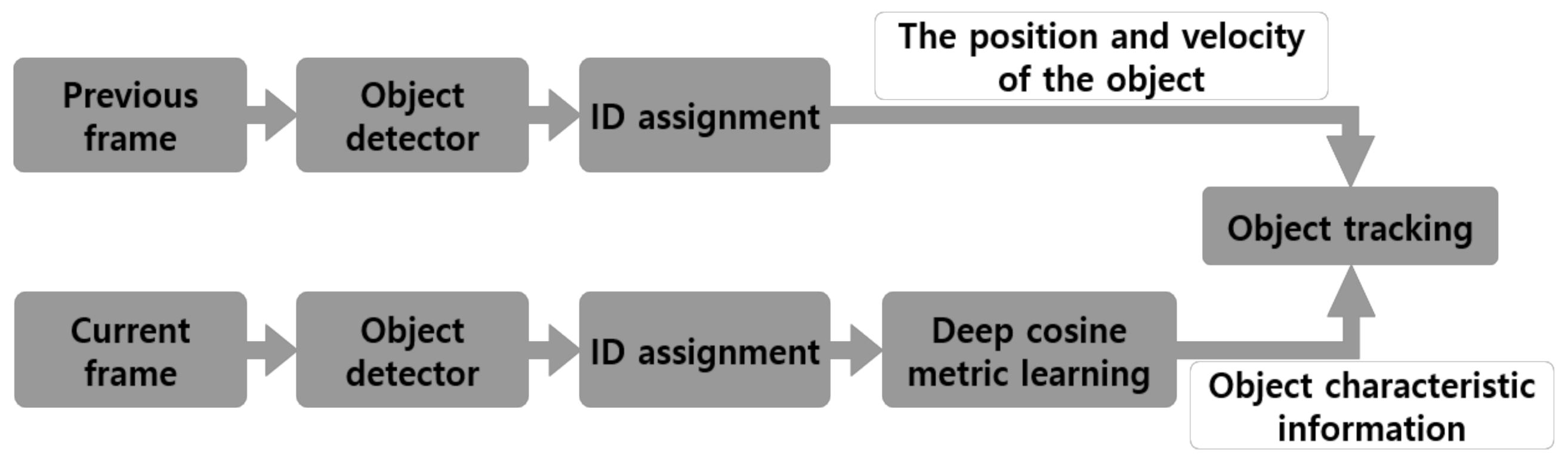
4.3. Multiple Object Tracking and ID Assignment
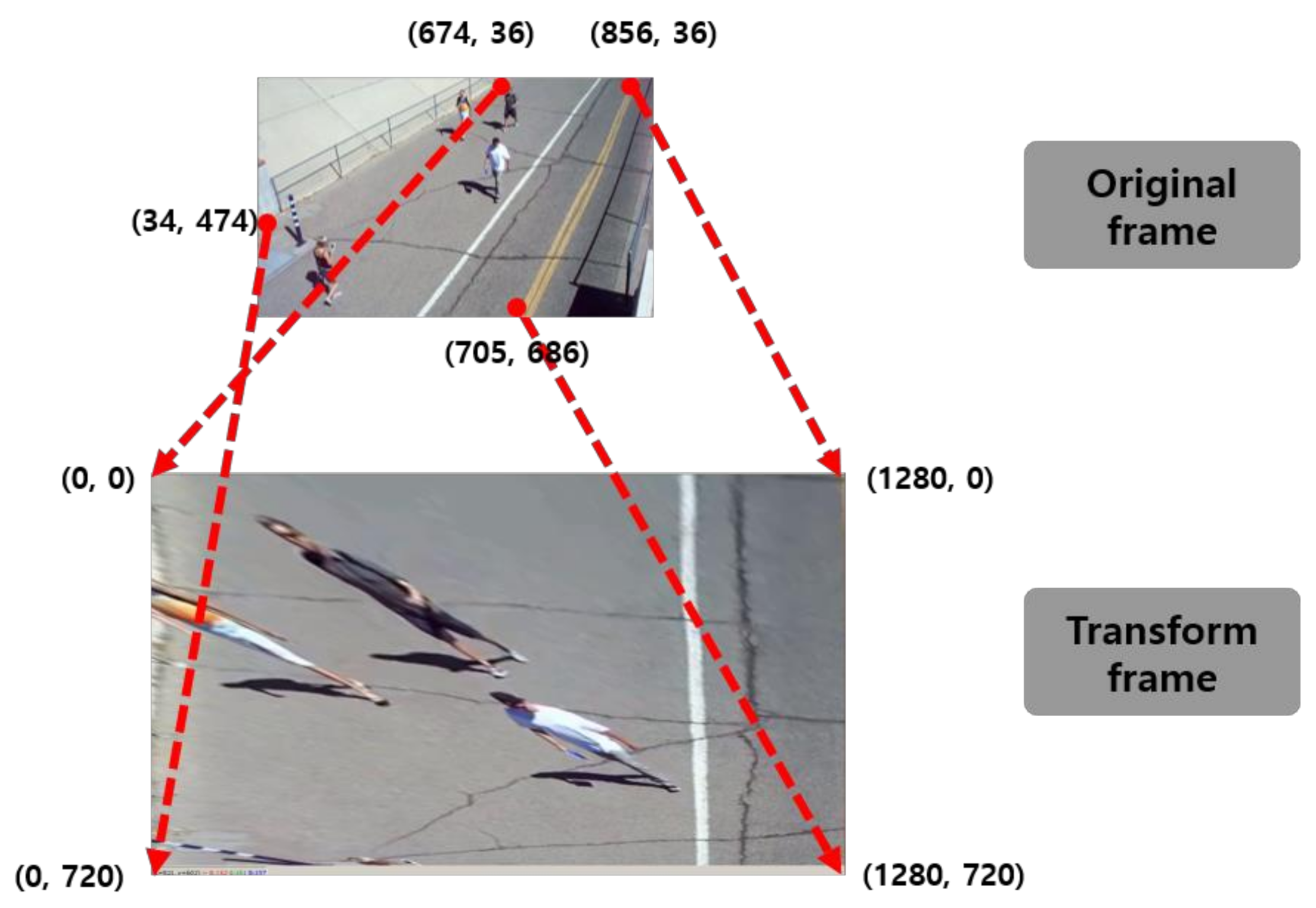
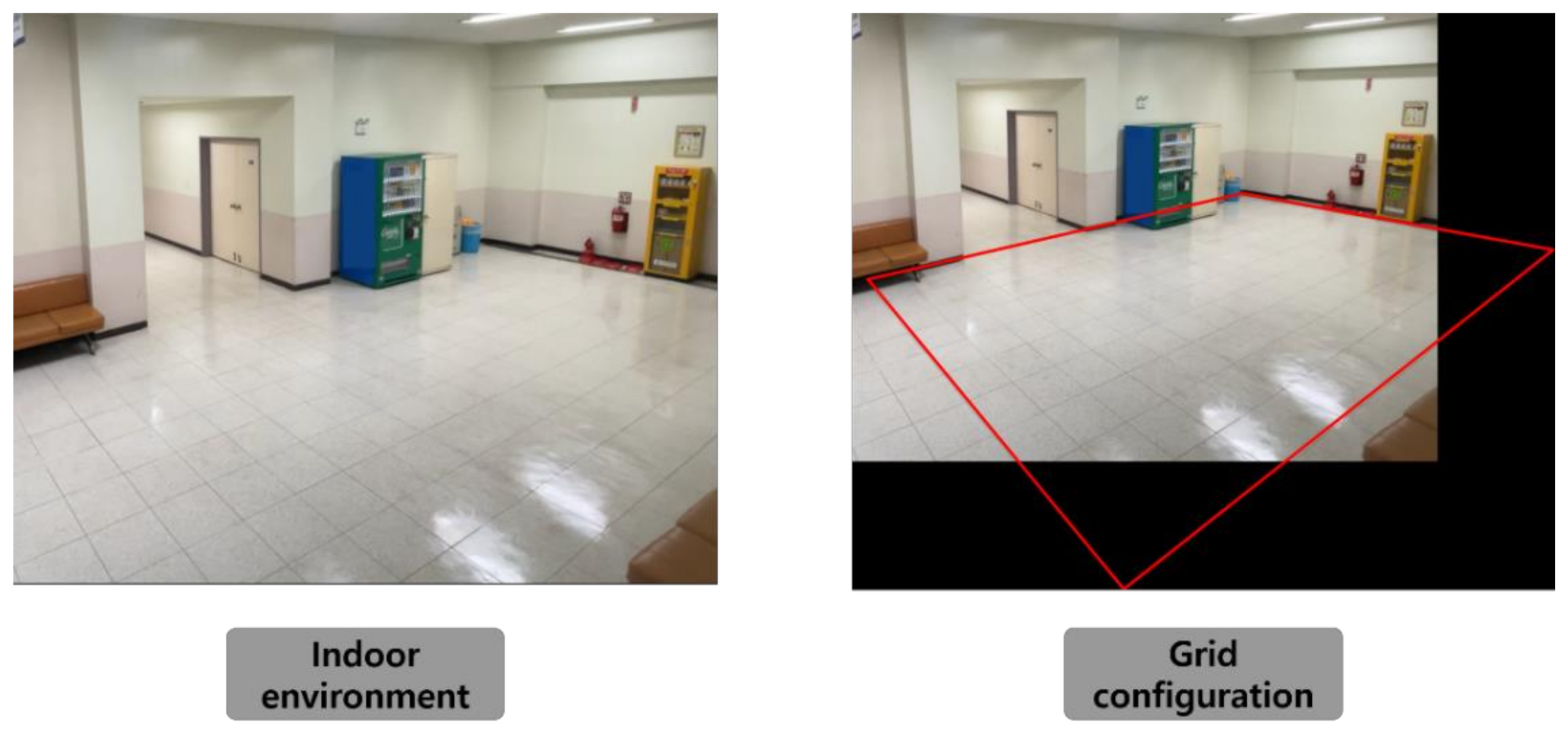
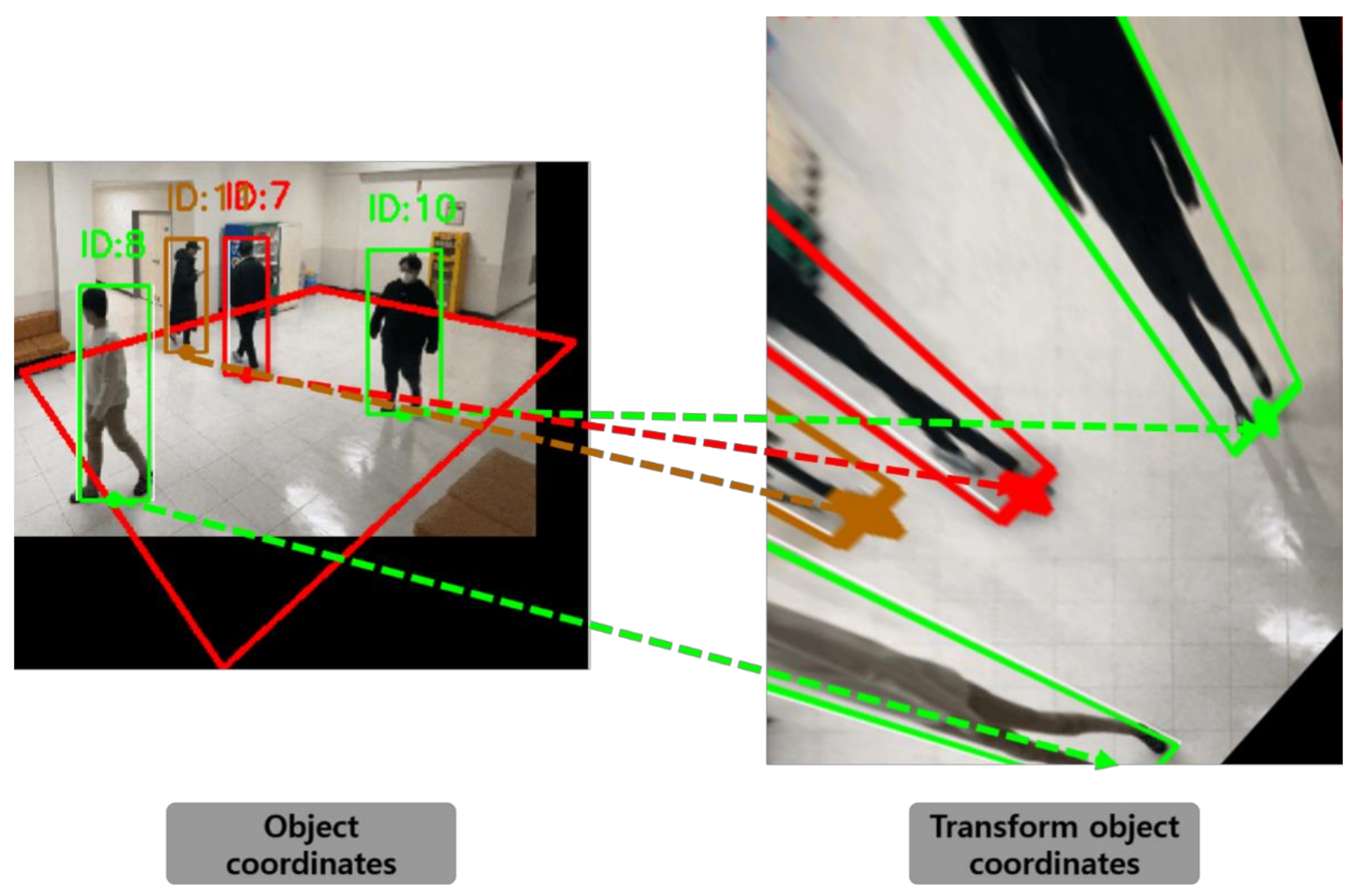
4.4. Video Frame Transformation
4.5. Object Distance Measurement
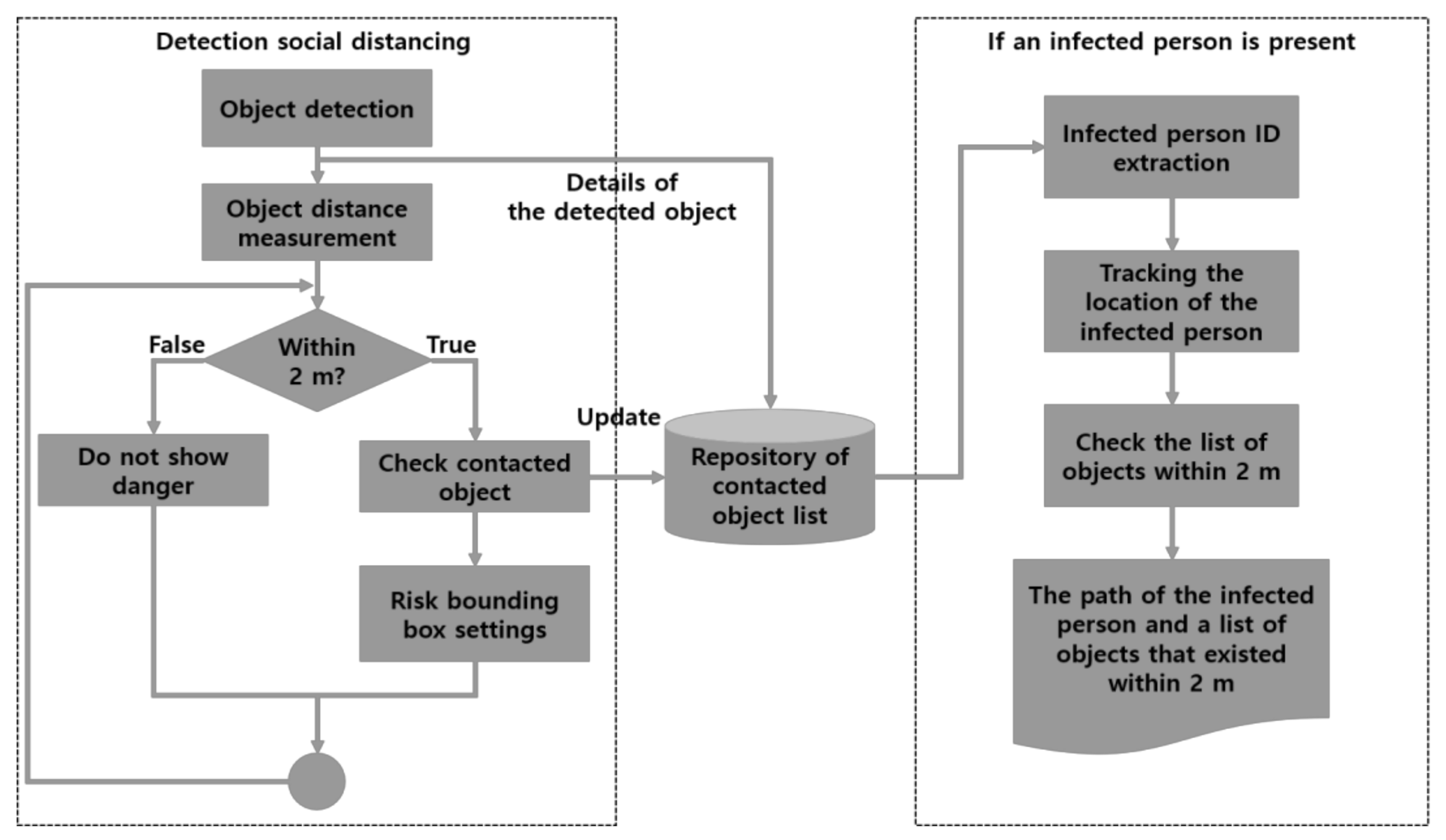
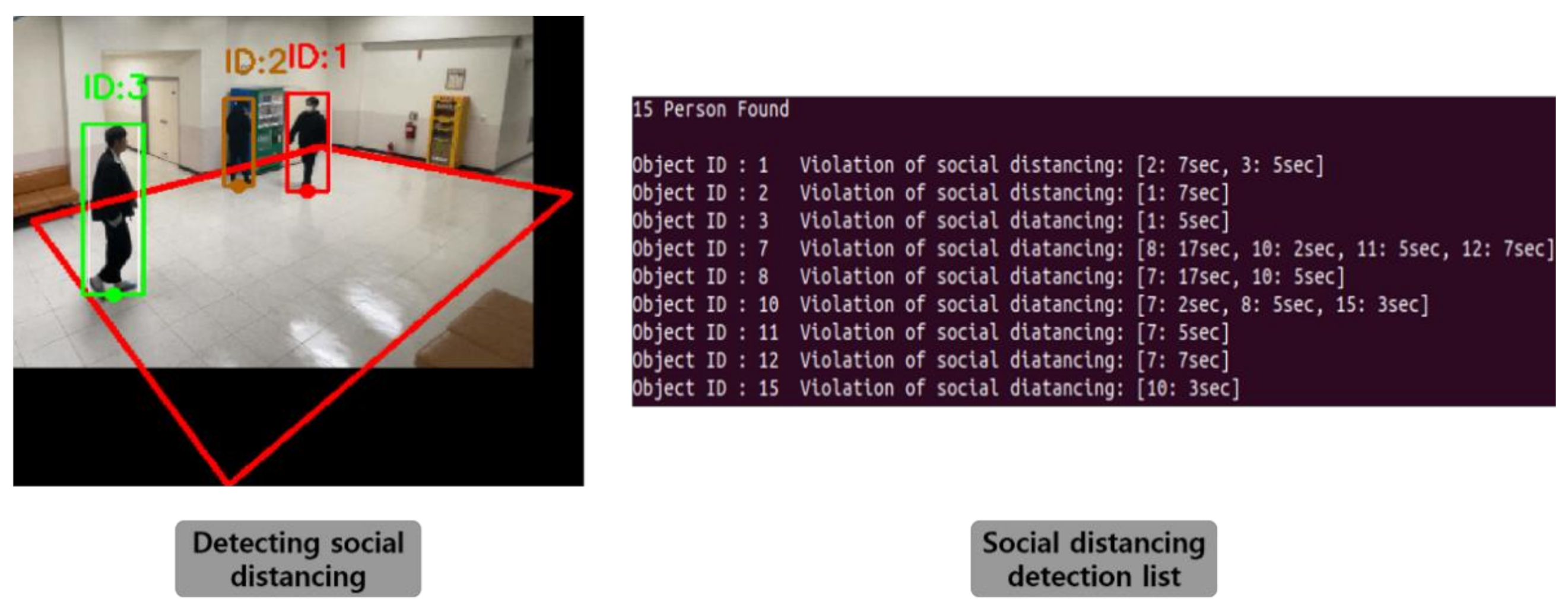
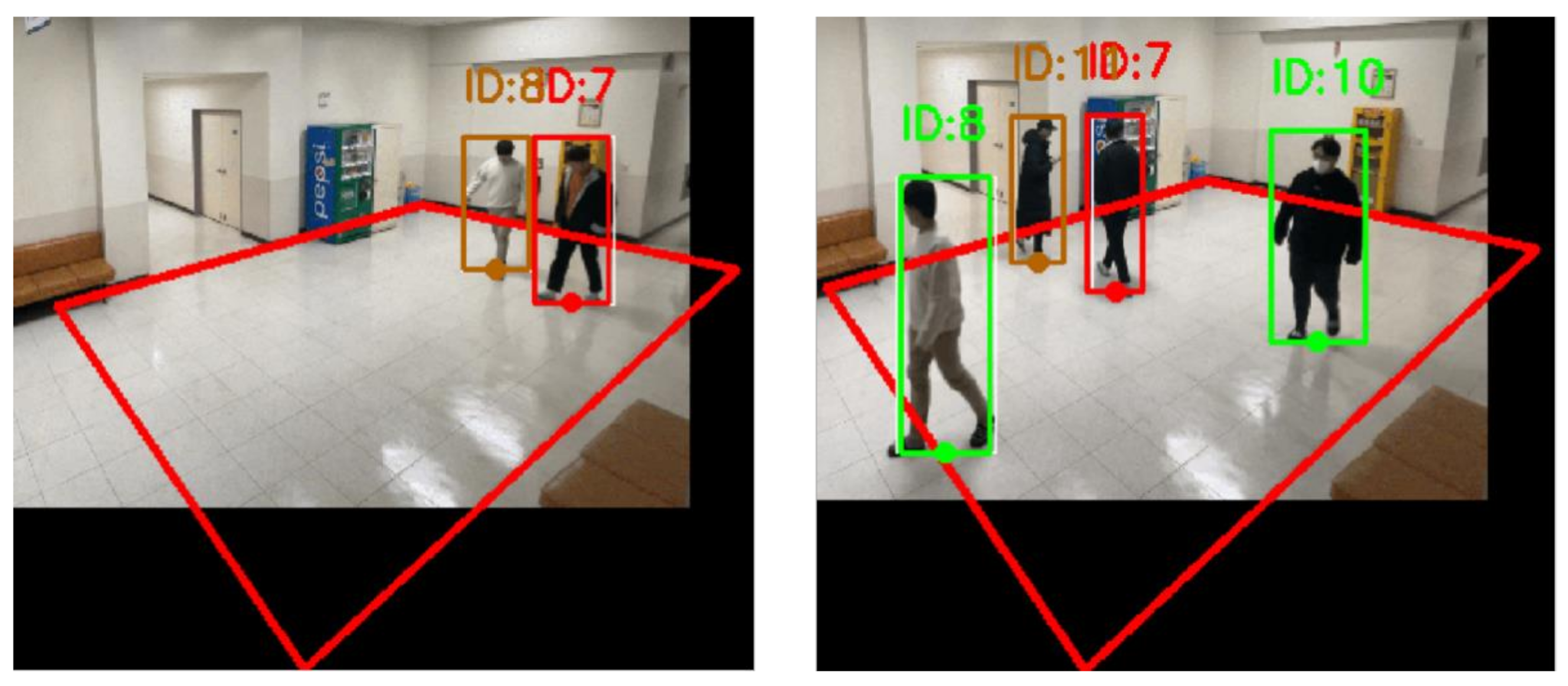
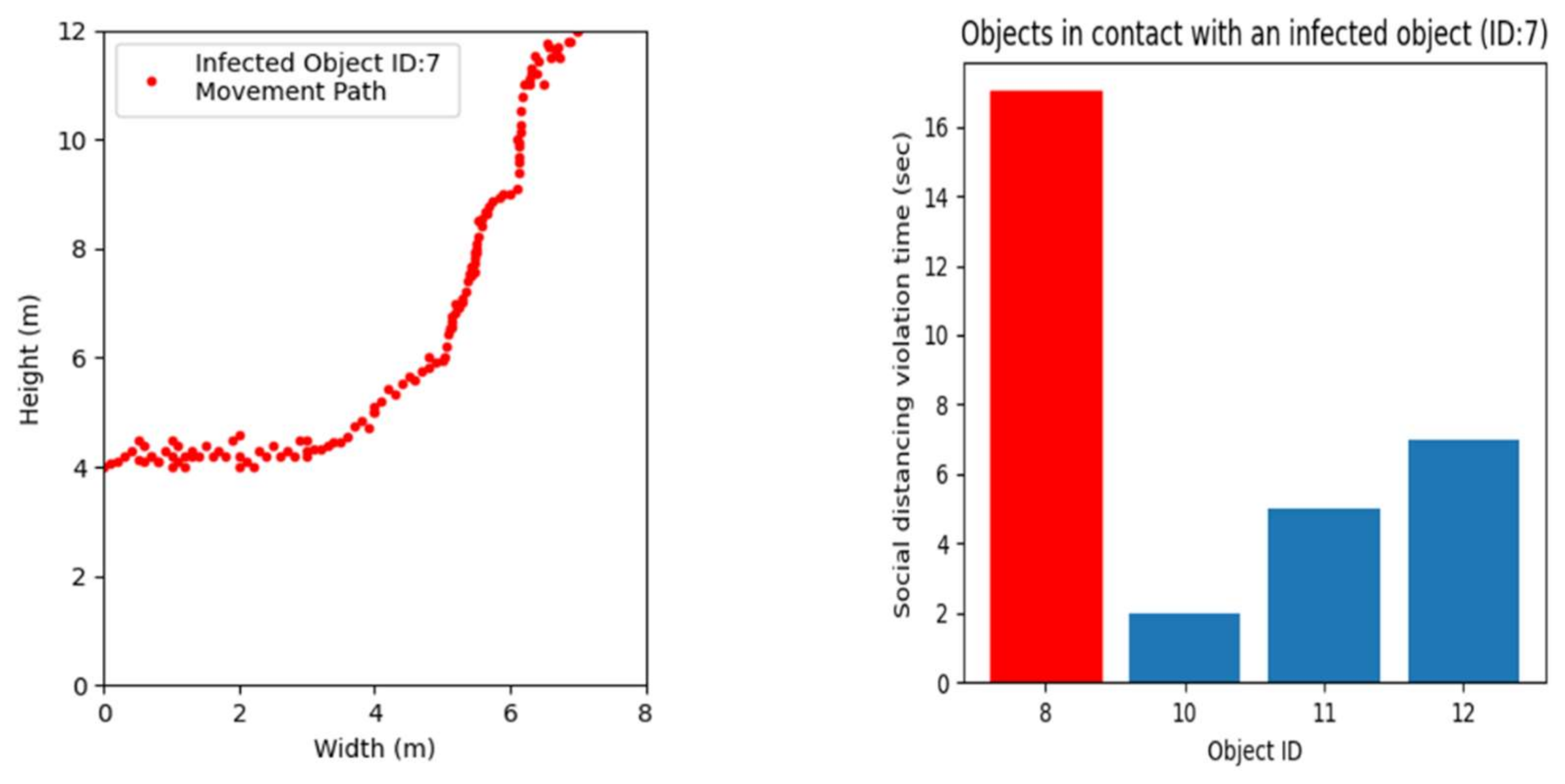
4.6. Detecting Social Distancing and Infected Person Tracking
5. Experiment
5.1. Environment
5.2. Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Velavan, T.P.; Meyer, C.G. The COVID-19 epidemic. Trop. Med. Int. Health 2020, 25, 278. [Google Scholar] [CrossRef] [Green Version]
- Zu, Z.Y.; Di Jiang, M.; Xu, P.P.; Chen, W.; Ni, Q.Q.; Lu, G.M.; Zhang, L.J. Coronavirus Disease 2019 (COVID-19): A Perspective from China. Radiology 2020, 296, E15–E25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lewnard, A.J.; Lo, N.C. Scientific and ethical basis for social-distancing interventions against COVID-19. Lancet Infect. Dis. 2020, 20, 631–633. [Google Scholar] [CrossRef] [Green Version]
- Thu, T.P.B.; Ngoc, P.N.H.; Hai, N.M.; Tuan, L.A. Effect of the social distancing measures on the spread of COVID-19 in 10 highly infected countries. Sci. Total. Environ. 2020, 742, 140430. [Google Scholar] [CrossRef] [PubMed]
- McGrail, D.J.; Dai, J.; McAndrews, K.M.; Kalluri, R. Enacting national social distancing policies corresponds with dramatic reduction in COVID19 infection rates. PLoS ONE 2020, 15, e0236619. [Google Scholar] [CrossRef] [PubMed]
- Mittal, R.; Meneveau, C.; Wu, W. A mathematical framework for estimating risk of airborne transmission of COVID-19 with application to face mask use and social distancing. Phys. Fluids 2020, 32, 101903. [Google Scholar] [CrossRef]
- Du, W.; Wang, G. Indoor Air Pollution was Nonnegligible during COVID-19 Lockdown. Aerosol Air Qual. Res. 2020, 20, 1851–1855. [Google Scholar] [CrossRef]
- Sun, C.; Zhai, Z. The efficacy of social distance and ventilation effectiveness in preventing COVID-19 transmission. Sustain. Cities Soc. 2020, 62, 102390. [Google Scholar] [CrossRef] [PubMed]
- Nwanaji-Enwerem, J.C.; Allen, J.G.; Beamer, P.I. Another invisible enemy indoors: COVID-19, human health, the home, and United States indoor air policy. J. Expo. Sci. Environ. Epidemiol. 2020, 30, 773–775. [Google Scholar] [CrossRef] [PubMed]
- Nishiura, H.; Oshitani, H.; Kobayashi, T.; Saito, T.; Sunagawa, T.; Matsui, T.; Wakita, T.; MHLW COVID-19 Response Team; Suzuki, M. Closed environments facilitate secondary transmission of coronavirus disease 2019 (COVID-19). MedRxiv 2020. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Hu, B.; Hu, C.; Zhu, F.; Liu, X.; Zhang, J.; Wang, B.; Xiang, H.; Cheng, Z.; Xiong, Y.; et al. Clinical Characteristics of 138 Hospitalized Patients With 2019 Novel Coronavirus–Infected Pneumonia in Wuhan, China. JAMA 2020, 323, 1061–1069. [Google Scholar] [CrossRef] [PubMed]
- Guan, W.J.; Ni, Z.Y.; Hu, Y.; Liang, W.H.; Ou, C.Q.; He, J.X.; Liu, L.; Shan, H.; Lei, C.L.; Hui, D.S.C.; et al. Clinical Characteristics of Coronavirus Disease 2019 in China. N. Engl. J. Med. 2020, 382, 1708–1720. [Google Scholar] [CrossRef] [PubMed]
- Benreguia, B.; Moumen, H.; Merzoug, M.A. Tracking COVID-19 by Tracking Infectious Trajectories. IEEE Access 2020, 8, 145242–145255. [Google Scholar] [CrossRef]
- Truong, M.T.N.; Kim, S. A tracking-by-detection system for pedestrian tracking using deep learning technique and color in-formation. J. Inf. Process. Syst. 2019, 15, 1017–1028. [Google Scholar]
- Gupta, S.; Thakur, K.; Kumar, M. 2D-human face recognition using SIFT and SURF descriptors of face’s feature regions. Vis. Comput. 2021, 37, 447–456. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision 2016, Amsterdam, The Netherlands, 8–16 October 2016. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Uijlings, J.R.R.; Van De Sande, K.E.A.; Gevers, T.; Smeulders, A.W.M. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef] [Green Version]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Jiang, M.; Rao, Y.; Zhang, J.; Shen, Y. Automatic behavior recognition of group-housed goats using deep learning. Comput. Electron. Agric. 2020, 177, 105706. [Google Scholar] [CrossRef]
- Juang, J.-G.; Tu, G.-T.; Liao, Y.-H.; Huang, T.-H.; Chang, S.-I. Drone patrol using thermal imaging for object detection. Infrared Sensors, Devices, and Applications X.; SPIE-Intl Soc Optical Eng. Sensors 2020, 11503, 115030U. [Google Scholar]
- Wu, D.; Lv, S.; Jiang, M.; Song, H. Using channel pruning-based YOLO v4 deep learning algorithm for the real-time and ac-curate detection of apple flowers in natural environments. Comput. Electron. Agric. 2020, 178, 105742. [Google Scholar] [CrossRef]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3464–3468. [Google Scholar]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017. [Google Scholar]
- Hou, X.; Wang, Y.; Chau, L.-P. Vehicle Tracking Using Deep SORT with Low Confidence Track Filtering. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019; pp. 1–6. [Google Scholar]
- Kapania, S.; Saini, D.; Goyal, S.; Thakur, N.; Jain, R.; Nagrath, P. Multi Object Tracking with UAVs using Deep SORT and YOLOv3 RetinaNet Detection Framework. In Proceedings of the 1st ACM Workshop on Autonomous and Intelligent Mobile Systems, Association for Computing Machinery (ACM), Bangalore, India, 1–22 November 2020; pp. 1–6. [Google Scholar]
- Wang, Q.; Cao, L.; Xia, J.; Zhang, Y. MTCNN-KCF-deepSORT: Driver Face Detection and Tracking Algorithm Based on Cascaded Kernel Correlation Filtering and Deep SORT; SAE International: Troy, MI, USA, 2020. [Google Scholar]
- Cheng, R.-S.; Hong, W.-J.; Wang, J.-S.; Lin, K.W. Seamless Guidance System Combining GPS, BLE Beacon, and NFC Technologies. Sensors 2016, 2016, 1–12. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, J.; Luo, N.; Wang, L.; Wang, W.; Wen, K. Improving Wi-Fi fingerprint positioning with a pose recognition-assisted SVM algorithm. Remote Sens. 2019, 11, 652. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Kim, J.; Moon, N. Random forest and WiFi fingerprint-based indoor location recognition system using smart watch. Hum.-Cent. Comput. Inf. Sci. 2019, 9, 6. [Google Scholar] [CrossRef]
- Yang, Q.; Zheng, S.; Liu, M.; Zhang, Y. Research on Wi-Fi indoor positioning in a smart exhibition hall based on received signal strength indication. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Khanh, T.T.; Nguyen, V.; Pham, X.-Q.; Huh, E.-N. Wi-Fi indoor positioning and navigation: A cloudlet-based cloud computing approach. Human-centric Comput. Inf. Sci. 2020, 10, 1–26. [Google Scholar] [CrossRef]
- Rahim, A.; Maqbool, A.; Rana, T. Monitoring social distancing under various low light conditions with deep learning and a single motionless time of flight camera. PLoS ONE 2021, 16, e0247440. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.; Yurtsever, E.; Renganathan, V.; Redmill, K.A.; Özgüner, Ü.A. vision-based social distancing and critical density detection system for covid-19. arXiv 2020, arXiv:2007.03578. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6 September 2014; pp. 740–755. [Google Scholar]
- Punn, N.S.; Sonbhadra, S.K.; Agarwal, S. Monitoring COVID-19 social distancing with person detection and tracking via fine-tuned YOLO v3 and Deepsort techniques. arXiv 2020, arXiv:2005.01385. [Google Scholar]
- Gupta, S.; Kapil, R.; Kanahasabai, G.; Joshi, S.S.; Joshi, A.S. SD-Measure: A Social Distancing Detector. In Proceedings of the 2020 12th International Conference on Computational Intelligence and Communication Networks (CICN), Institute of Electrical and Electronics Engineers (IEEE), Bhimtal, India, 25–26 September 2020; pp. 306–311. [Google Scholar]
- Cristani, M.; Del Bue, A.; Murino, V.; Setti, F.; Vinciarelli, A. The Visual Social Distancing Problem. IEEE Access 2020, 8, 126876–126886. [Google Scholar] [CrossRef]
- Bhambani, K.; Jain, T.; Sultanpure, K.A. Real-time Face Mask and Social Distancing Violation Detection System using YOLO. In Proceedings of the 2020 IEEE Bangalore Humanitarian Technology Conference (B-HTC), Institute of Electrical and Electronics Engineers (IEEE), Bangalore, India, 8–10 October 2020; pp. 1–6. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Element | Real-Time | Object Detection | Object Tracking | Infected Object Tracking | |
|---|---|---|---|---|---|
| Paper Author | |||||
| Yang [34] | Yes | Yes | No | No | |
| Punn [36] | Yes | Yes | No | No | |
| Gupta [37] | Yes | Yes | No | No | |
| Cristani [38] | Yes | Yes | No | No | |
| Bhambani [39] | Yes | Yes | Yes | No | |
| Proposed System | Yes | Yes | Yes | Yes | |
| Evaluation Factor | mAP | FPS | |
|---|---|---|---|
| Model | |||
| YOLOv3 | 30.4 | 30.3 | |
| YOLOv4 | 42.1 | 60.2 | |
| Object ID | Start Time | End Time | Movement Path |
|---|---|---|---|
| Object1 | 2021-04-10 13:13:02 | 2021-04-10 13:14:30 | (210, 220), (205, 216) |
| Object2 | 2021-04-10 13:13:10 | 2021-04-10 13:13:52 | (130, 150), (135, 155) |
| Object3 | 2021-04-11 08:15:10 | 2021-04-10 08:16:10 | (480, 540), (490, 530) |
| Object n | 2021-04-11 08:15:02 | 2021-04-11 08:16:35 | (504, 402), (545, 395) |
| Object ID | Object ID within 2 m | Detected Location | Time (Sec) |
|---|---|---|---|
| Object1 | Object4 | (145, 165), (139, 155) | 15 |
| Object1 | Object7 | (195, 185), (180, 175) | 20 |
| Object3 | Object n | (480, 540), (490, 530) | 10 |
| Object n | Object3 | (504, 402), (545, 395) | 10 |
| Type | Contents |
|---|---|
| Server OS | Ubuntu 18.04.5 LTS |
| Server CPU | Intel i9-9900k |
| Server GPU | Nvidia Titan RTX |
| CCTV Device | Logitech C922 Pro HD Stream Webcam |
| Python version | 3.6.9 |
| Tensorflow version | 1.14.0 |
| Keras version | 2.4.1 |
| OpenCV version | 4.2.0 |
| FPS | 10 | 24 | 35 | 50 | |
|---|---|---|---|---|---|
| Element | |||||
| Actual number of objects | 15 | 15 | 15 | 15 | |
| Number of objects detected | 24 | 16 | 19 | 18 | |
| Accuracy | 62.5 | 93.7 | 78.9 | 83.3 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, M.; Moon, N. Indoor Distance Measurement System COPS (COVID-19 Prevention System). Sustainability 2021, 13, 4738. https://doi.org/10.3390/su13094738
Shin M, Moon N. Indoor Distance Measurement System COPS (COVID-19 Prevention System). Sustainability. 2021; 13(9):4738. https://doi.org/10.3390/su13094738
Chicago/Turabian StyleShin, Minchan, and Nammee Moon. 2021. "Indoor Distance Measurement System COPS (COVID-19 Prevention System)" Sustainability 13, no. 9: 4738. https://doi.org/10.3390/su13094738
APA StyleShin, M., & Moon, N. (2021). Indoor Distance Measurement System COPS (COVID-19 Prevention System). Sustainability, 13(9), 4738. https://doi.org/10.3390/su13094738