1. Introduction
Since its appearance in 2019, the COVID-19 pandemic has provoked a huge behavior change in the way people travel. A modal shift from public transport to personal cars or bicycles has been observed [
1]. While this shift may help to reduce crowdedness in public transportation and thereafter decrease the virus expansion, it may lead to higher carbon emission [
1]. Whereas, with the climate emergency, it is crucial to provide sustainable mobility solutions that satisfy the pandemic requirements.
In this context, shared autonomous vehicles have been proposed as a solution to reduce car ownership and provide a personal travel experience [
2]. In recent years, we have witnessed a progressive automation of vehicles (especially cars) [
3], which has increased research interest in autonomous mobility solutions. This knowledge of autonomous driving has also been transferred to micro-vehicles as they reduce street congestion by using sidewalks [
4]. As a type of micro-vehicles, Assmann et al. [
5] suggested the use of a shared fleet of autonomous cargo bikes to improve city sustainability. Autonomous bikes can be used as a means for a transportation service as well as for last mile delivery.
In this work, we introduce the “On-demand Shared-use Autonomous Bike-sharing Service” (OSABS) which is a novel on-demand mobility option that is environmentally friendly and COVID safe. Passengers can book a bike via a smartphone application. The bike drives autonomously to its location within the given service time (10 min). The customer will ride it manually to the desired destination and release it after usage. Then, the bike drives to either the next customer, a waiting station (to park close to prospective demands), or a charging station (for battery refueling). This service allows a door-to-door mobility solution with zero human contact. In addition, the use of a shared autonomous cargo-bike fleet enhances the city’s sustainability as it reinforces the multi-usage of streets and thus helps reduce congestion and pollution [
5].
However, one major challenge to the success of this new mode of transport is the optimization of the vehicle’s fleet. To guarantee the economic viability of this service, it is important to operate the fleet as efficiently as possible by reducing the unnecessary operational costs and satisfying the customer demand with the minimum fleet size. With an autonomous fleet, the management opportunities are enormous. Using self-driving technologies, idle vehicles can be relocated proactively according to the upcoming demand to prevent their accumulation in low-demand areas and to better satisfy customer requests. In addition, self-driving vehicles enable relocation to be executed centrally by a fleet operator that controls the state of all the vehicles and analyses the demand, rather than locally by individual drivers.
Given this expansion of fleet management options, there are endless possible relocation strategies that could be implemented. This paper aims to explore the implication of different rebalancing parameters on OSABS performance. Such an evaluation study will help decision makers determine the suitable strategy for this new service. The remainder of the paper is as follows: In
Section 2, we present an overview of related research and publications. In
Section 3, we describe the research methodology and the data used in this work. In
Section 4, we present and analyze the simulation results and discuss them in
Section 5. We conclude with fleet management insights in
Section 6.
3. Methodology
As OSABS is an entirely new service and still under development, our methodology of choice is simulation. The simulation study provides fundamental knowledge about the interaction of various elements in complex real-world systems and enables the evaluation of system performance. According to [
38], agent-based models (ABMs) are better than other simulation methods for simulating a complex system with interdependent entities such as mobility systems involving self-driving vehicles. A significant number of studies have used agent-based simulation to study autonomous vehicle fleet management and provide decision support to decision makers [
38]. One of the main advantages of ABM is the ability to define the behavior of different system components at a detailed level through the use of state charts [
39].
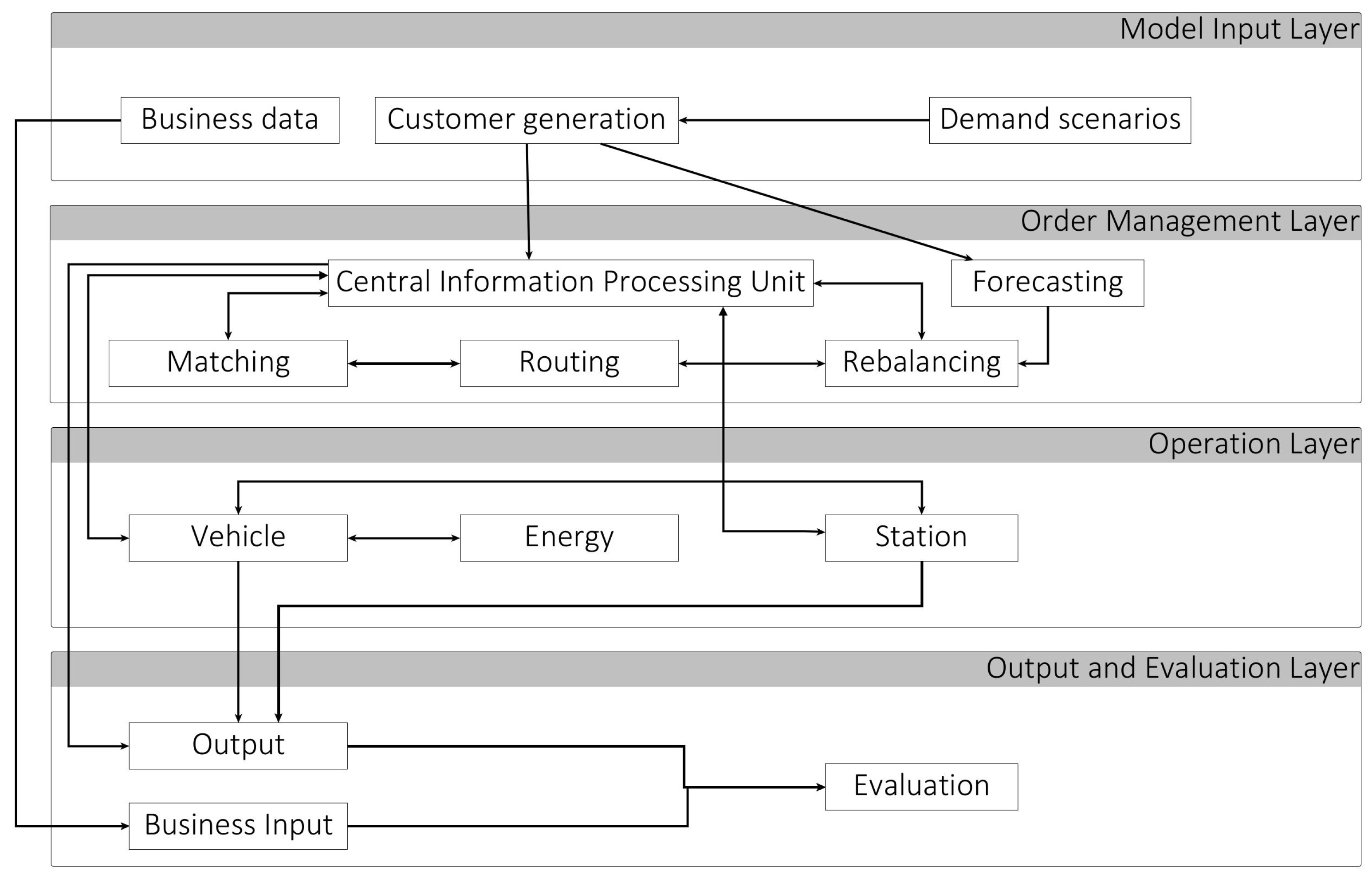
In this work, we used agent-based simulation to study OSABS because it allows incorporating different agents with different characteristics and preferences. An overview of the conceptual model is presented in
Figure 1. The reader can refer to [
40] for a detailed description of the conceptual model. As can be seen in the overview, the main components of the model are customers (created based on demand scenarios), bikes, and stations (waiting and charging stations). The interaction between the different components is handled by the management operator mainly through two algorithms: the matching algorithm that allows the assignment of bikes to customer requests and the rebalancing algorithm that redistributes the bikes among the different stations. Both algorithms use the output of the routing algorithm for optimization. The structure of the simulation model was developed to represent the real-world components of the system. As input, we provide the system with business data (such as capital costs and user fees) and demand scenarios in the form of an OD statistical distribution. On the output side, we can collect performance indicators (including service level, mileage traveled for rebalancing, and energy consumed for relocation) and statistics that allow us to evaluate the efficiency and profitability of the system.
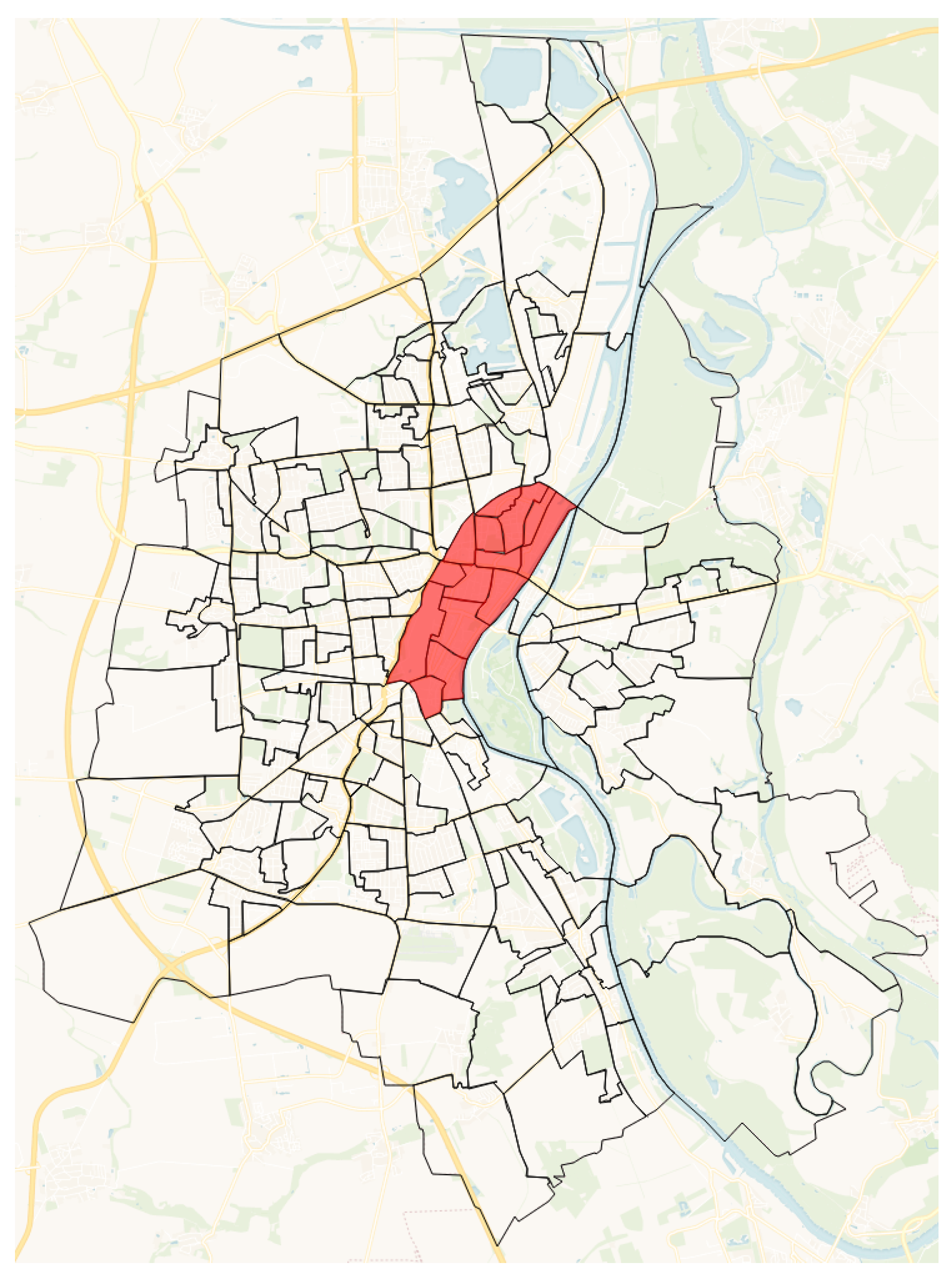
As an operational area for the simulation model, we considered two different options as shown in
Figure 2:
The inner city of Magdeburg, which contains 14 regions (only regions colored in red in
Figure 2).
The complete city of Magdeburg, which contains 182 regions (all the regions presented in
Figure 2).
In the following parts, we will describe in detail the input (mainly demand generation), the bike operation, and the fleet management of our simulation model.
3.1. Demand Generation
In the literature, several approaches are providing a framework for creating demand scenarios for conventional bike-sharing systems (e.g., [
41,
42,
43]). However, most of them aim at predicting demand in already existing systems. Although some approaches can be used to model demand in urban areas where no bike-sharing system has yet been implemented (e.g., [
44]), they cannot be transferred due to the differences between conventional bike-sharing systems and OSABS. We, therefore, provide an approach to determine the demand for the new mobility concept in a temporally and spatially disaggregated manner and apply this to the city of Magdeburg. In the first step, a survey on mobility needs in Magdeburg (n = 781) is evaluated by an interdisciplinary team of environmental psychologists and engineers concerning the city-wide usage potential of autonomous cargo bikes. Secondly, the resulting usage likelihood per average traffic day is disaggregated both spatially and temporally. For spatial disaggregation, we use existing traffic data provided by the municipality of Magdeburg in the form of origin-destination pairs (OD pairs) for four different modes of transport. The resulting demand is then temporally disaggregated, to enable the prediction of usage to the hour. For this purpose, we derive usage patterns from existing conventional bike-sharing systems and transfer them to the new system.
3.2. Bike Operation
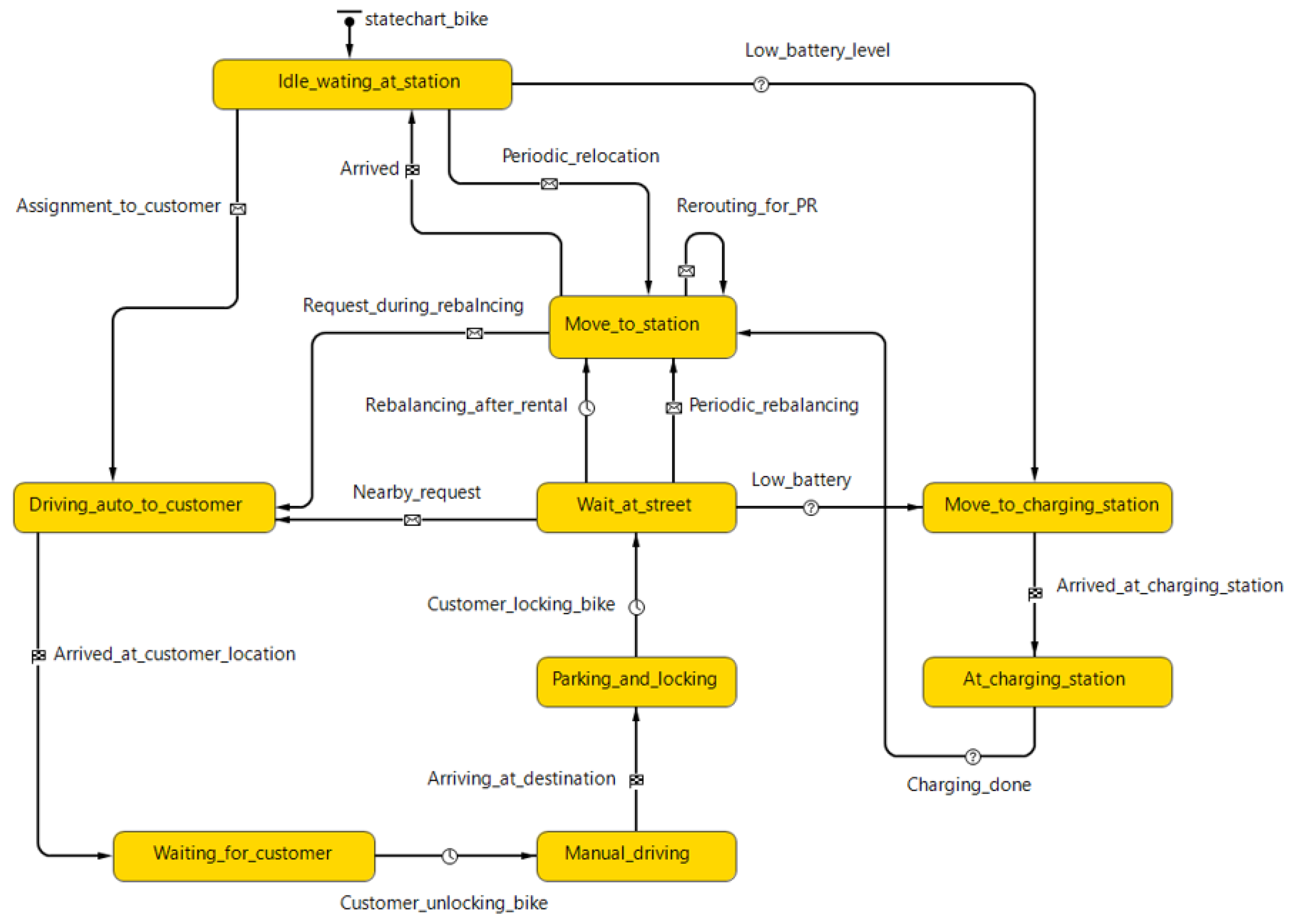
The behavior of the bike is simulated according to the state chart shown in
Figure 3. Each bike has several states that it should go through. Each state is activated when the previous transition is verified. At the beginning of the simulation, all the bikes are parked in the waiting station with full batteries. During the simulation, the bike can go through the following transitions and states:
Customer requests are generated based on an origin-destination schedule. The customer appears at a random location in the origin region, and a random location is assigned to the request in the destination region. The matching algorithm will assign the appropriate bike based on the energy consumption of the route ensuring a waiting time of less than 10 min. When a bike is assigned to the request, it travels autonomously to the customer.
When the bike reaches the origin location, it waits for the customer to arrive.
The customer picks up the bike and drives manually to the destination location using the manual mode.
Arriving at the destination, the customer parks the bike and locks it. Now, the bike is available again. The bike waits for one minute in the street to check if there are requests in the surrounding. If no request appears, the rebalancing after rental strategy sends the bike to a waiting station according to the upcoming demand. It is necessary to mention that we prioritize serving current requests over bike relocation. That means when the bike is in-route to the waiting station but a request appears nearby, then the bike is assigned to the customer request.
After each served request and when the bike is at the waiting station, we check the battery level. If it is below 20%, the bike should go for charging.
When the charging is done, we move the bike according to the rebalancing after rental strategy.
Each period T, the periodic rebalancing algorithm will check the imbalance between regions and move available bikes (at the street, in the waiting station, or on their way to a waiting station) according to the upcoming demand.
3.3. Fleet Management Strategies
The fleet management includes the assignment of bikes to customer requests and the relocation of idle bikes throughout the network. The matching algorithm works on a first-come-first-served (FCFS) basis. It checks for available bikes able to satisfy the customer’s request in less than 10 min. It assigns a suitable bike with less travel (energy consumption) costs. If there is no idle bike in the 10 min area, the request is rejected. In this section, we focus on the rebalancing algorithm. We differentiate between three relocation strategies:
“To any” strategy: It consists of calculating the imbalance of each region (the difference between the available bikes at the beginning of the period and the estimated number of required bikes to serve the demand for the next period) and then relocating idle bikes to regions with a negative imbalance from the nearest regions with positive imbalance.
“To vicinity” strategy: In this strategy, the idle bikes move only from regions with a positive imbalance to neighboring regions with a negative imbalance.
“Mixed” strategy: this strategy is a combination of the “to vicinity” and “to any” strategies. For regions with a significant imbalance (imbalance ≥ 5), we allow rebalancing from any region. However, for regions with a moderate imbalance (imbalance < 5), only rebalancing from neighboring regions is allowed.
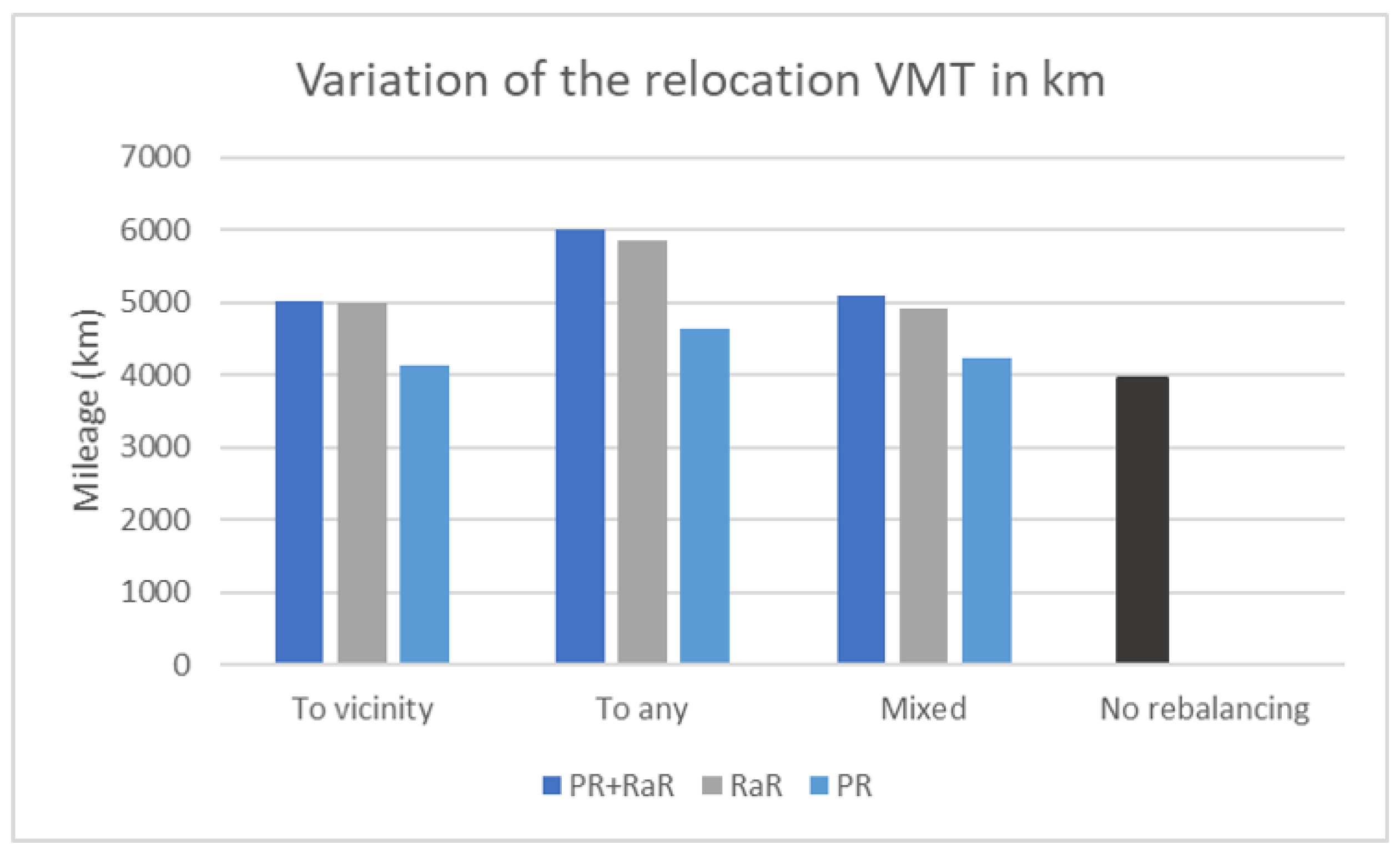
For each rebalancing strategy, we can also differentiate between two types of relocation:
Periodic rebalancing (PR): it is performed periodically (for example, each 1 h). It consists of relocating idle bikes from a region with oversupply to undersupplied regions in its vicinity only. The priority is given to the region with the highest deficit in the neighborhood.
Rebalancing after rental (RaR): this relocation operation is performed after the customer leaves the bike. The bike remains in the customer destination region if it already has a negative imbalance. Otherwise, it moves to the region with the highest deficit in the vicinity. If no region in the neighborhood has a deficit, the bike is assigned to the waiting station of the destination region.
The objective of this paper is to compare these two rebalancing types by answering the following questions: Are they both necessary for the optimal functioning of the system or one type is sufficient? Which one performs better and on which frequency should it be done? What is the best rebalancing schema for each operational area? To answer these questions, we perform simulation tests and analyze the results.
5. Discussion
This paper addresses the rebalancing problem for OSABS specifically and for AMoD services in general. We investigated how the rebalancing performance is affected by the operational area, the relocation type, and the frequency applied. The results collected with numerical experiments for the city of Magdeburg, Germany, provide detailed insights into how the fleet size, operational costs, and service levels develop under scenarios of different rebalancing configurations.
First, we show that the optimal choice of the fleet rebalancing strategy is strongly associated with the service area. For the inner city, the service operates in a small area and the demand imbalance between the different regions is low. Therefore, the “to vicinity” strategy has proved to ensure the best system performance with the lowest resource use. However, when we consider the complete city, we have a significant demand imbalance between the regions, and the service area is large. Thus, relocating bikes only from the vicinity could not allow adjusting the imbalance. These results confirm the fact that rebalancing operation is more crucial for suburban areas. It allows a considerable reduction in the fleet size reducing by this the investment and operations costs. Therefore, OSABS is presented as an innovative solution for connecting suburban areas to the inner city. One disadvantage of conventional bike-sharing is that it mainly operates in the inner city because of the inefficiency of the service for the rural areas. The major barriers to the use of CBS in suburban areas are the high prices of a bike rent (as a result of high rebalancing efforts), the need to transport children, and the unavailability of bike stations which results in a long distance between the customer location and a station [
47]. Thanks to autonomous driving, OSABS bikes could drive to the customer location and perform proactive rebalancing allowing a high system efficiency with minimal costs. In addition, users can transport their children on the cargo bike. We believe that OSABS could present a viable mobility solution in suburban areas. Considering that people who live in rural areas are more likely to decrease car usage than those living in urban areas [
48], the introduction of autonomous cargo bikes in suburban and rural areas could boost a modal shift from cars to bikes.
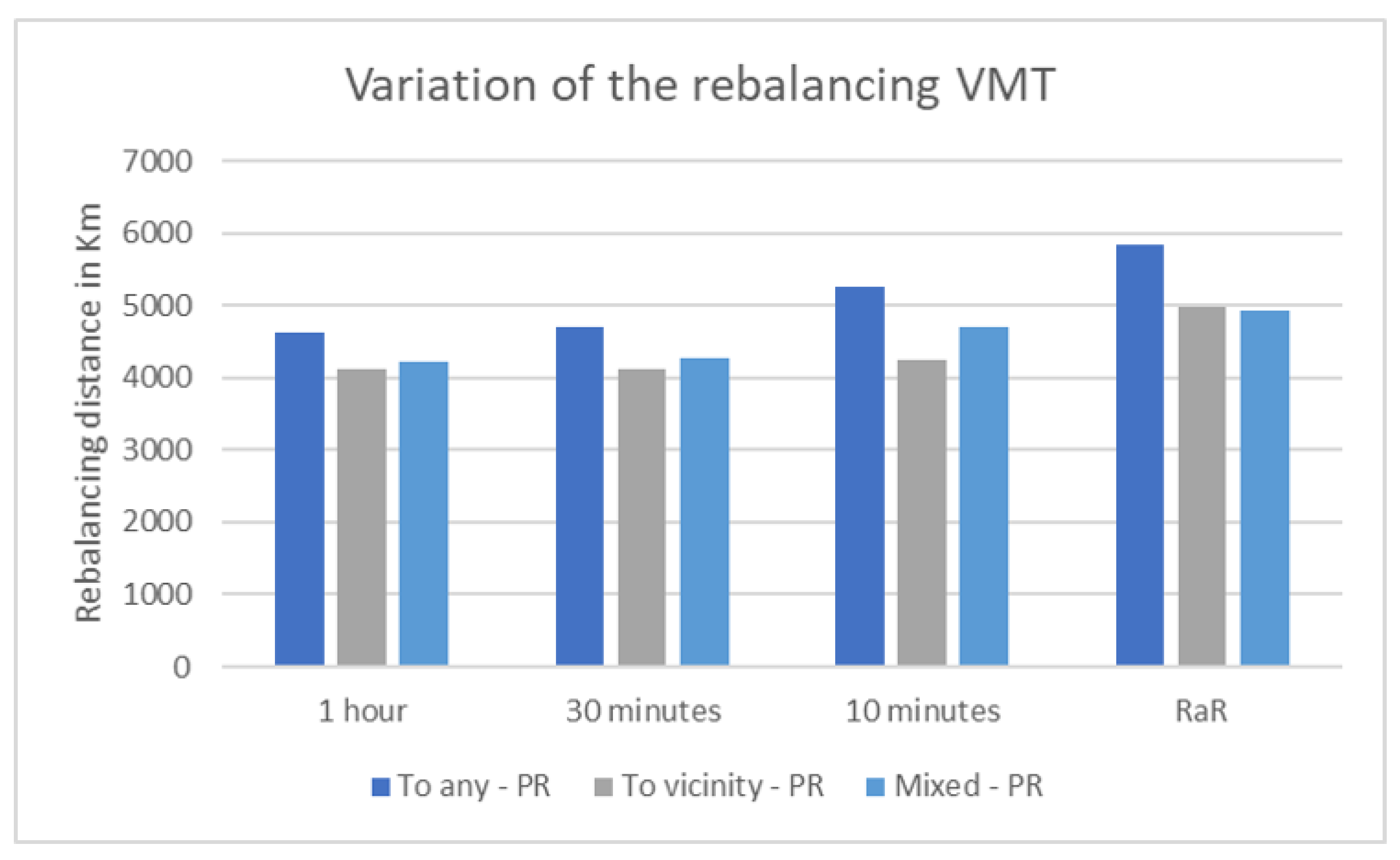
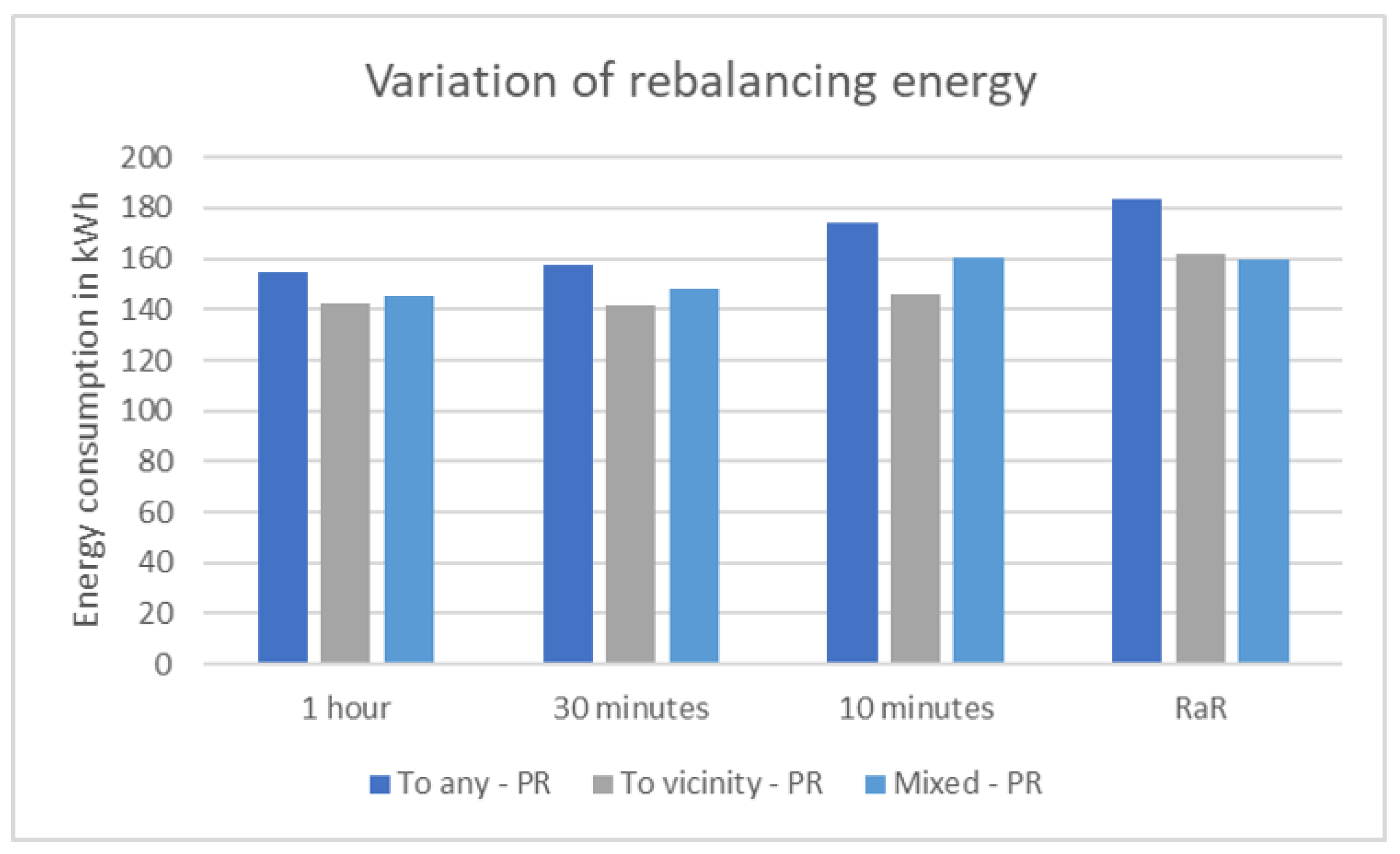
Second, we can conclude that, in most cases, (RaR) performs better than (PR). As we do not include the customer destination prediction in our rebalancing problem, it is hard to relocate bikes efficiently for 1 h or 30 min intervals. Considering a 10 min average rent duration, the bikes will move unpredictably around the network just after 10 min of the periodic rebalancing, canceling the relocation effect. However, the prediction of the customer destination will add more uncertainty to the model and could not be completely reliable. Therefore, (RaR) remains a better solution than (PR) because it allows real-time rebalancing and adjusts continuously the imbalance value after each customer request. Nevertheless, (PR) could help in moving bikes from areas where demand is rare or irregular. Therefore, we found that combining (PR) with (RaR) leads to system efficiency improvement for the complete city scenario. Unlike the results of [
35] where (PR) was found unnecessary for autonomous cars, these results recommend adding (PR), especially for a large area where the imbalance between the different regions is significant.
Third, a conclusion that we can suggest is that our system outperforms the rebalancing of CBSS. The periodic rebalancing could be compared to the operator-based relocation done by the trucks. While this relocation is not frequent (generally static or only during peak hours), it is not efficient compared to the rebalancing after rental. Thus, with the autonomous driving option, our system improves considerably the system efficiency by decreasing the required number of bikes in the system. From a life cycle perspective, the embodied emissions and energy consumption in bike production should not be neglected. Producing an excessive number of bikes leads to a large waste of energy and generates enormous GHG emissions [
49]. Therefore, it is important to reduce the number of bikes in the system and ensure optimized use of the fleet. In addition, the use of trucks for rebalancing in CBS leads to fuel consumption and gas emissions [
50]. With OSABS, there is no need for trucks to relocate bikes. This way, the bike rebalancing operation becomes more sustainable, with no gas emissions and less congestion compared to conventional systems. The assessment of OSABS benefits and the evaluation of rebalancing strategy need to be assessed by life cycle assessment (LCA) in future work [
51,
52] for a better comparison between OSABS and CBS.
Fourth, the experiment’s results indicate that excessive rebalancing does not necessarily lead to better system performance. An overuse of bikes for relocation could lead to frequent battery charging and reduce the bikes’ availability. These results highlight the importance of jointly optimizing the rebalancing and the charging operation. Implementing an adequate charging strategy has a high impact on the performance of the system [
29]. More research is needed to develop an advanced model integrating rebalancing with a charging policy.
Fifth, we believe that these results could be better evaluated if we consider the costs associated with the bike investment and energy consumption. While it is hard to give precise values at this stage of research, we will evaluate the results according to first estimations based on our talks with industry experts and our best knowledge of the market price [
37].
Table 5 presents the cost assumptions of our study.
Using the above costs, we calculate the energy and investment costs for the two scenarios “mixed (RaR)” and “mixed (PR + RaR)”. We obtained the following results presented in
Table 6.
As we can see, the total costs for the combined case are less than the (RaR) case. In fact, for OSABS, the major costs are related to the investment costs. Therefore, reducing the number of bikes leads to fewer costs even if it is associated with a slight increase in energy consumption. In addition, considering that the service level of the combined scenario is higher, then it leads absolutely to higher profits. Nevertheless, in this work, we do not take into account the impact of demand uncertainty on the rebalancing performances as in [
53]. A system with a small increase in the number of bikes could lead to more stable results in an uncertain environment.
6. Conclusions
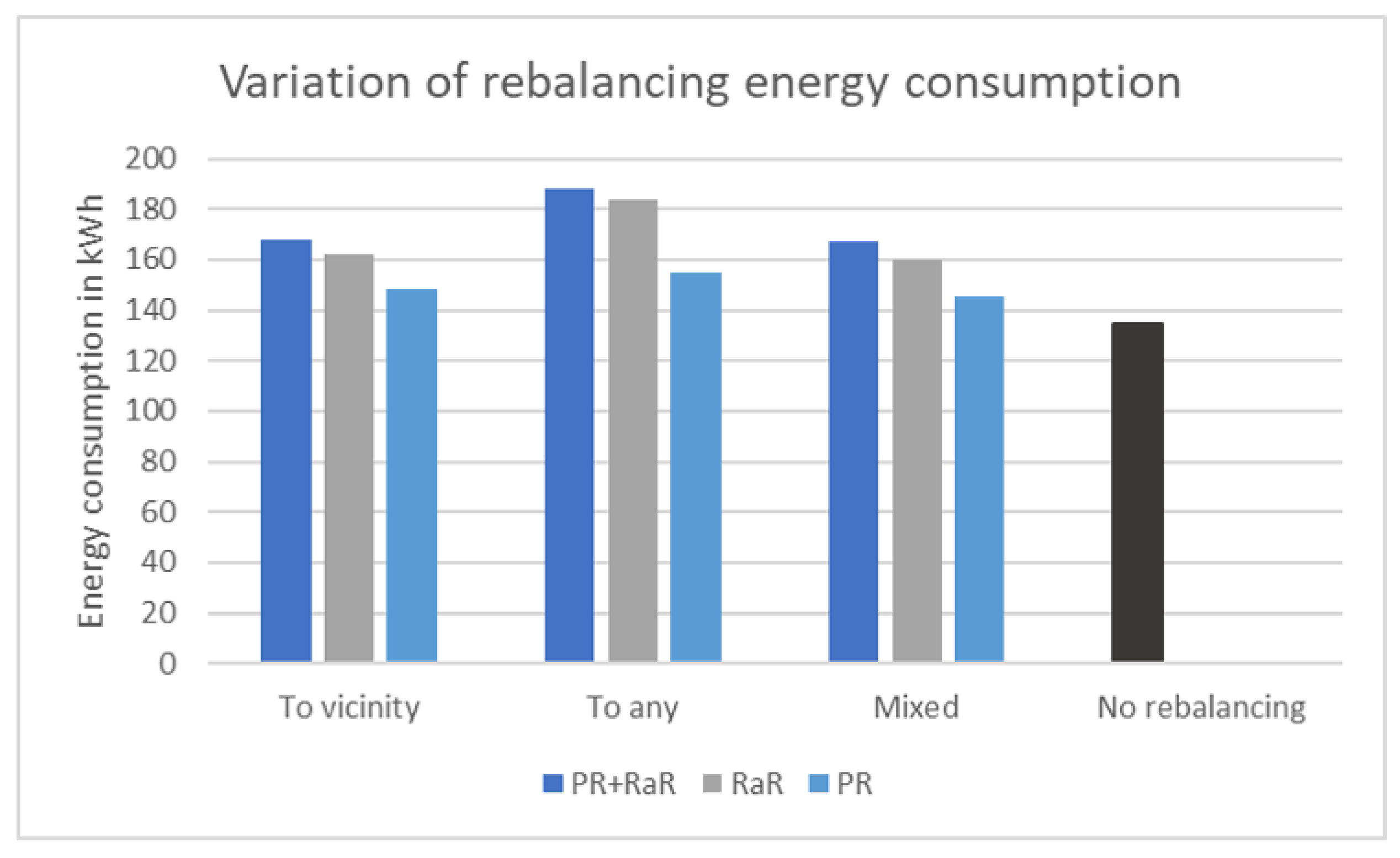
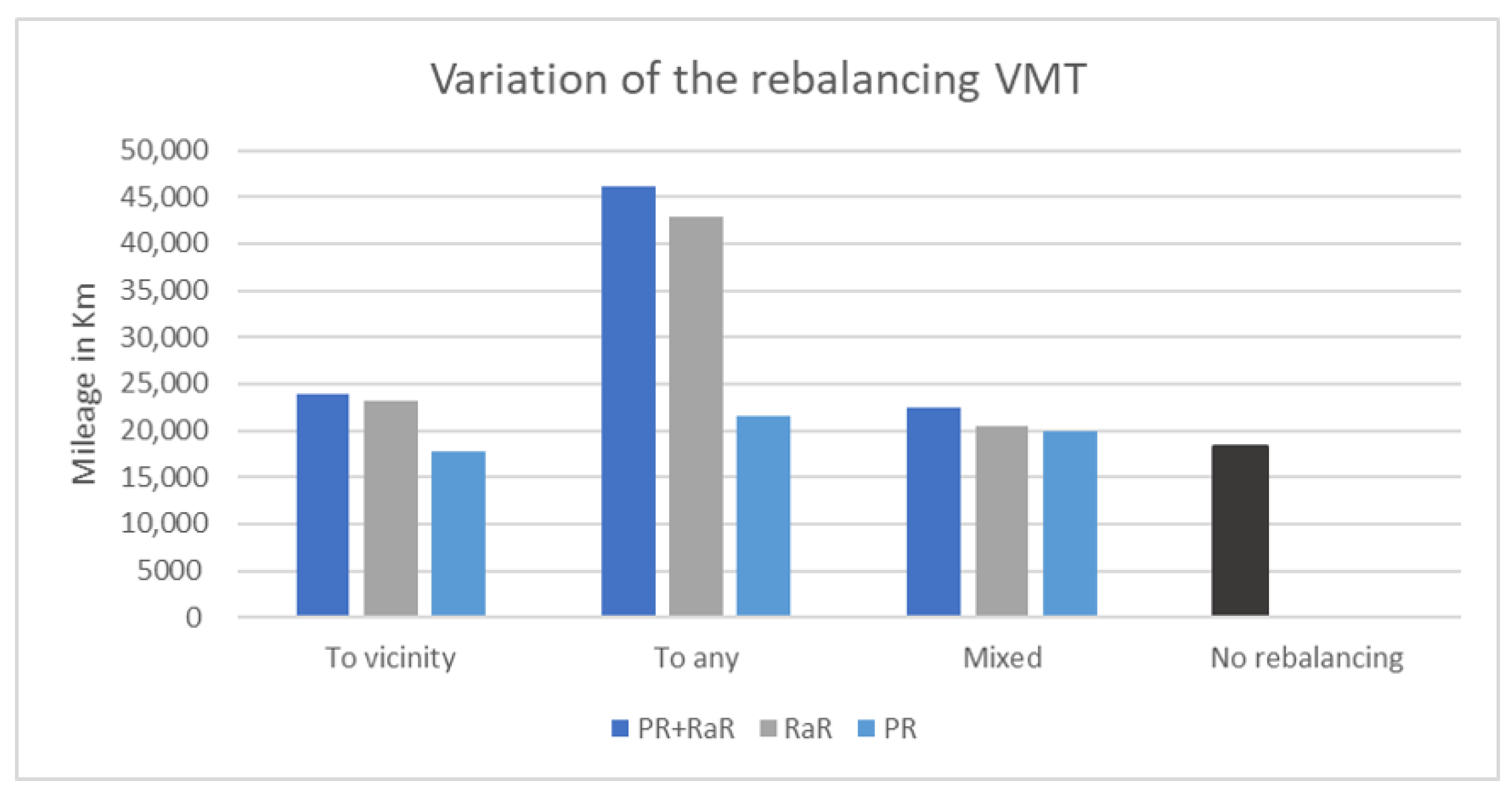
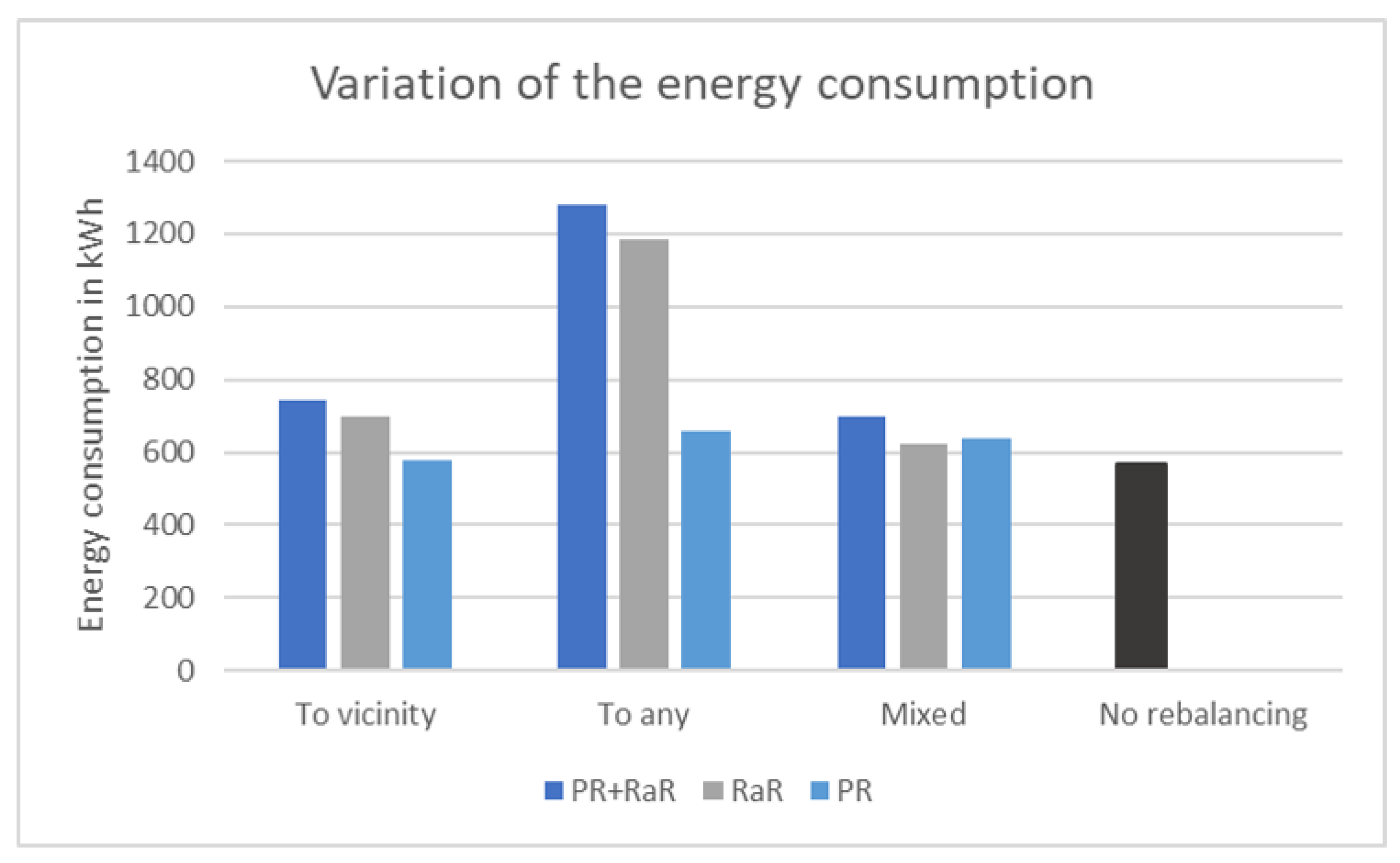
This paper investigates the influence of rebalancing type, frequency, and service area on the performance indicators of an autonomous on-demand mobility system. Autonomous vehicles allow for two rebalancing options: periodic rebalancing and rebalancing after rental. The results reveal the trade-offs between decreasing fleet size and increasing energy consumption. Although the combined strategy ensures a minimal number of bikes in the system, it results in an increase in idle mileage and energy consumption. However, the reduction in fleet size results in significant financial benefits through lower capital investment, lower overall energy consumption, and reduced maintenance costs. Periodic relocation uses few resources and could yield satisfactory results if implemented with adequate frequency, as is the case for the 10-min “to any” scenario. The relationship between fleet size and energy consumption is not linear and cannot be specified by a ratio. The model has various constraints that make the interaction between the different elements unpredictable. The main constraint is that we use batteries for our bicycles, and excessive use of the bicycles could lead to their unavailability during peak hours and thus deteriorate the performance of the system (as is the case for the “to any (PR + RaR)” strategy). In addition, we have the 10 min constraint for assigning bikes to requests. Furthermore, the trade-off depends heavily on the rebalancing strategy implemented. While a 9.79% increase in rebalancing energy compared to the “no rebalancing” case decreased the fleet size by 39.46% for the “mixed (RaR)” strategy, it took a 108.97% increase in rebalancing energy to decrease the fleet size by 38.38% for the “to any (RaR)” strategy. These results show that some rebalancing operations can use high resources for little improvement in system efficiency and service level. Therefore, it would be recommended to use a dynamic pricing scheme for OSABS, where requests that require more rebalancing miles are penalized.
As a recommendation for decision makers, we could suggest implementing the mixed rebalancing strategy for relocation after rental and periodic relocation considering a frequency of one hour. The mixed strategy performed best for the full city scenario. For the inner city area, it is very close to the “to vicinity” strategy in terms of energy consumption and service level and requires exactly the same number of bikes. Therefore, the mixed strategy is the best strategy to implement for both scenarios by providing efficient system rebalancing with minimized costs.
The results of this work should be considered with caution due to a set of limitations that merit improvement in future works. We are simulating only one demand scenario for one day and we are missing the impact of the demand variation on rebalancing performance. Further research aims to investigate the likelihood of results with other cities and various magnitude demands. The design of an extended model with a one-year simulation and different demand scenarios (from low to high) is under development.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}