


Load Frequency Control and Automatic Voltage Regulation in a Multi-Area Interconnected Power System Using Nature-Inspired Computation-Based Control Methodology
 , ,
, ,  , , and
, , and 
Abstract
:1. Introduction
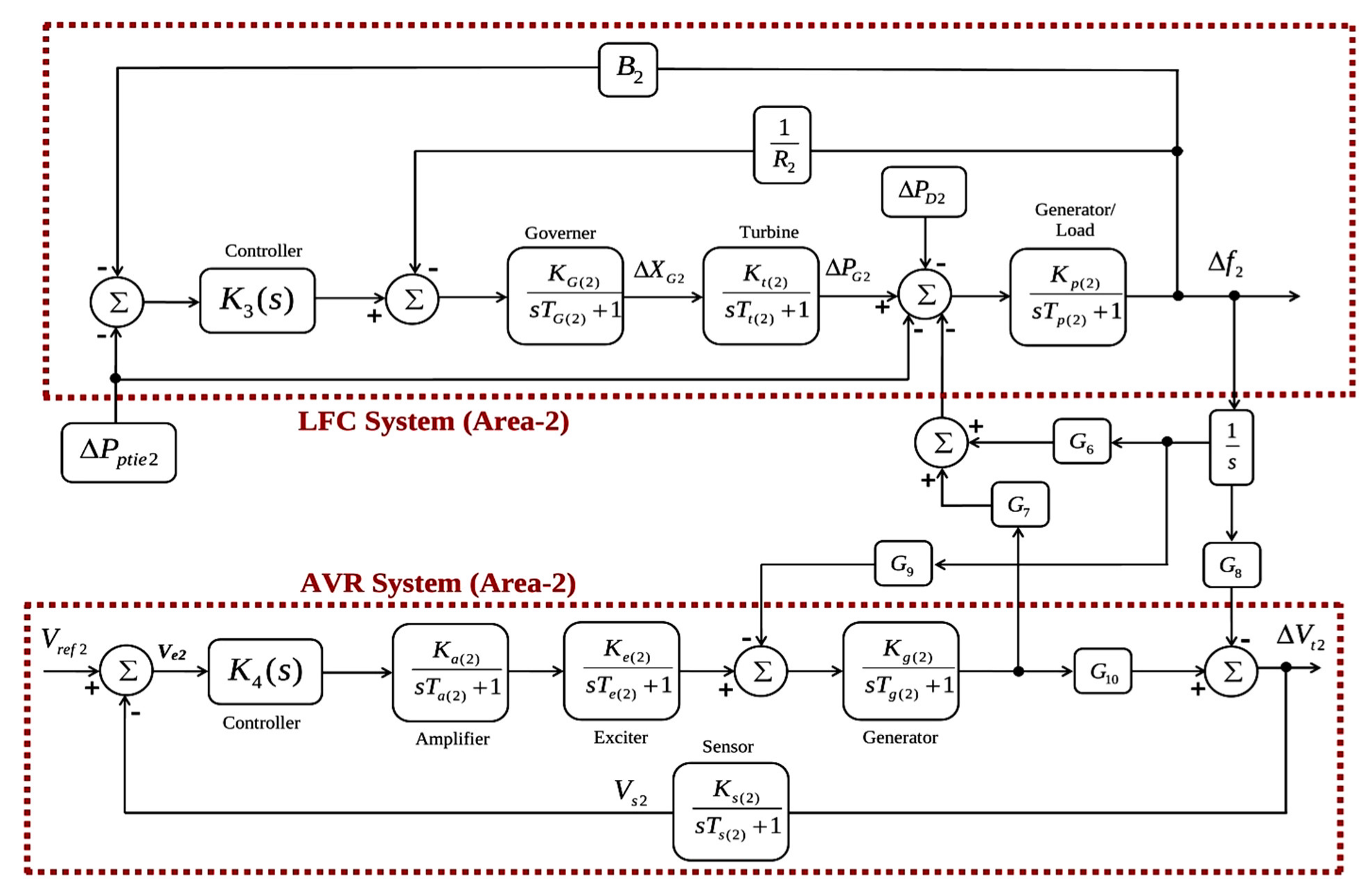
- The modeling of combined AVR-LFC for two-area and three-area IPS;
- The modeling of the PI-PD control scheme and its optimization using the Archimedes optimization algorithm (AOA), learner performance-based behavior optimization (LPBO), and modified particle swarm optimization (MPSO);
- The formulation of fitness functions for the optimization of proposed controller;
- Further, a comprehensive performance comparison is carried out between LPBO-PI-PD, AOA-PI-PD, and MPSO-PI-PD in two-area IPS. Moreover, the efficacy of the proposed control schemes has been tested in a three-area IPS with a combined LFC-AVR problem;
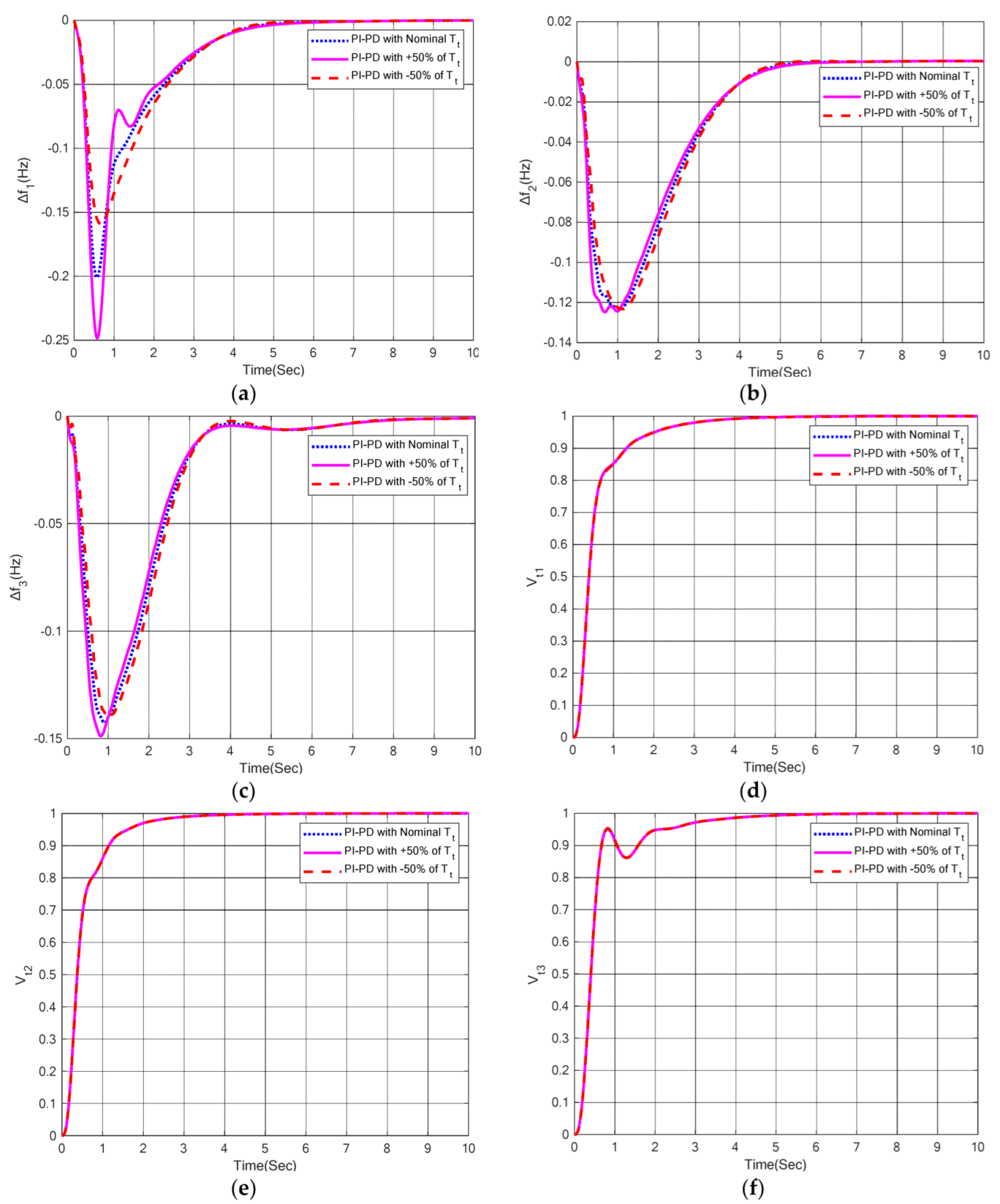
- The reliability of the proposed control methodology has been illustrated by altering the system parameters of three-area IPS over a range of  ± 50%.
2. Power System Model
3. Proposed Control Methodology
4. Nature-Inspired Computation Algorithms
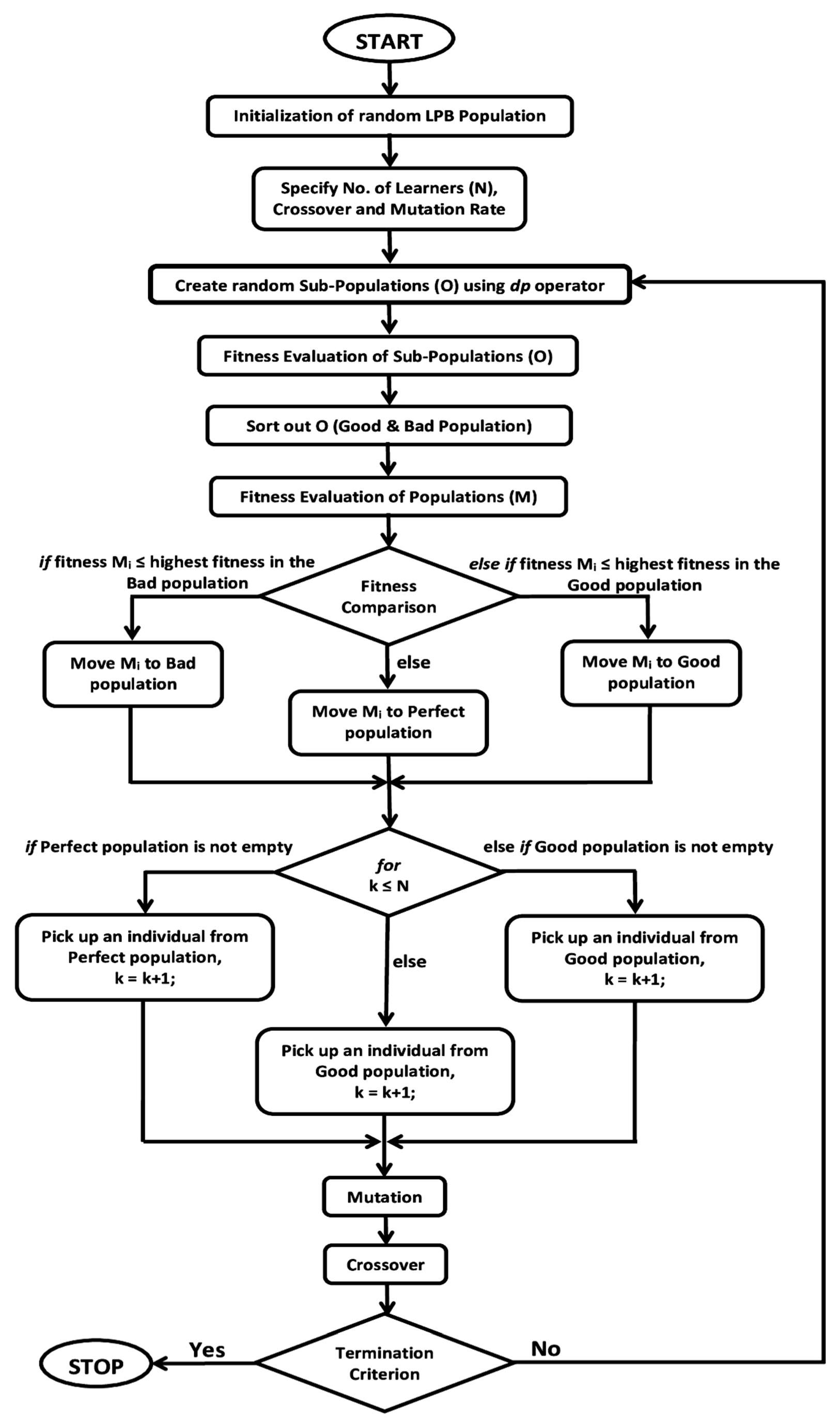
4.1. Learner Performance-Based Behavior Optimization
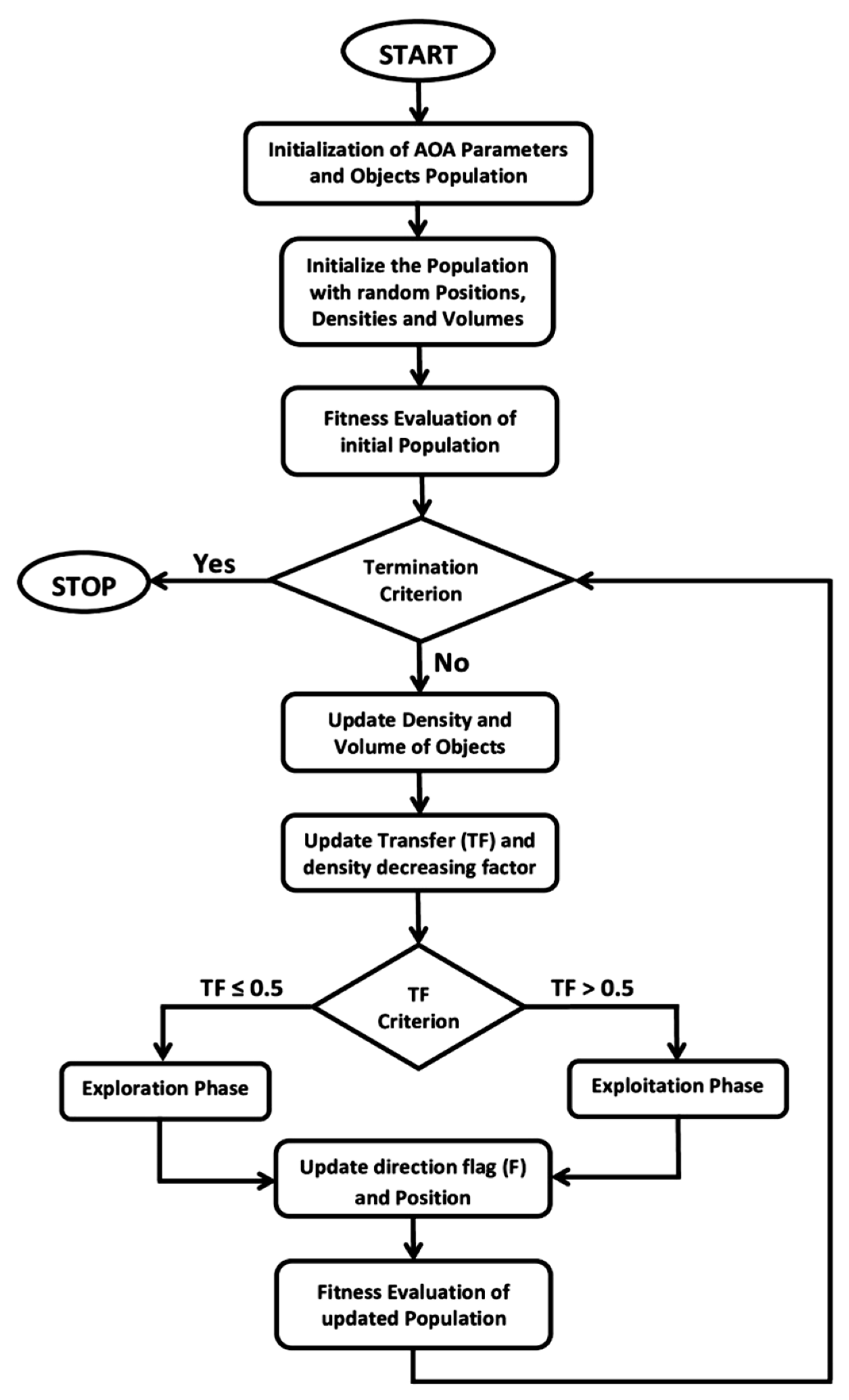
4.2. Archimedes Optimization Algorithm
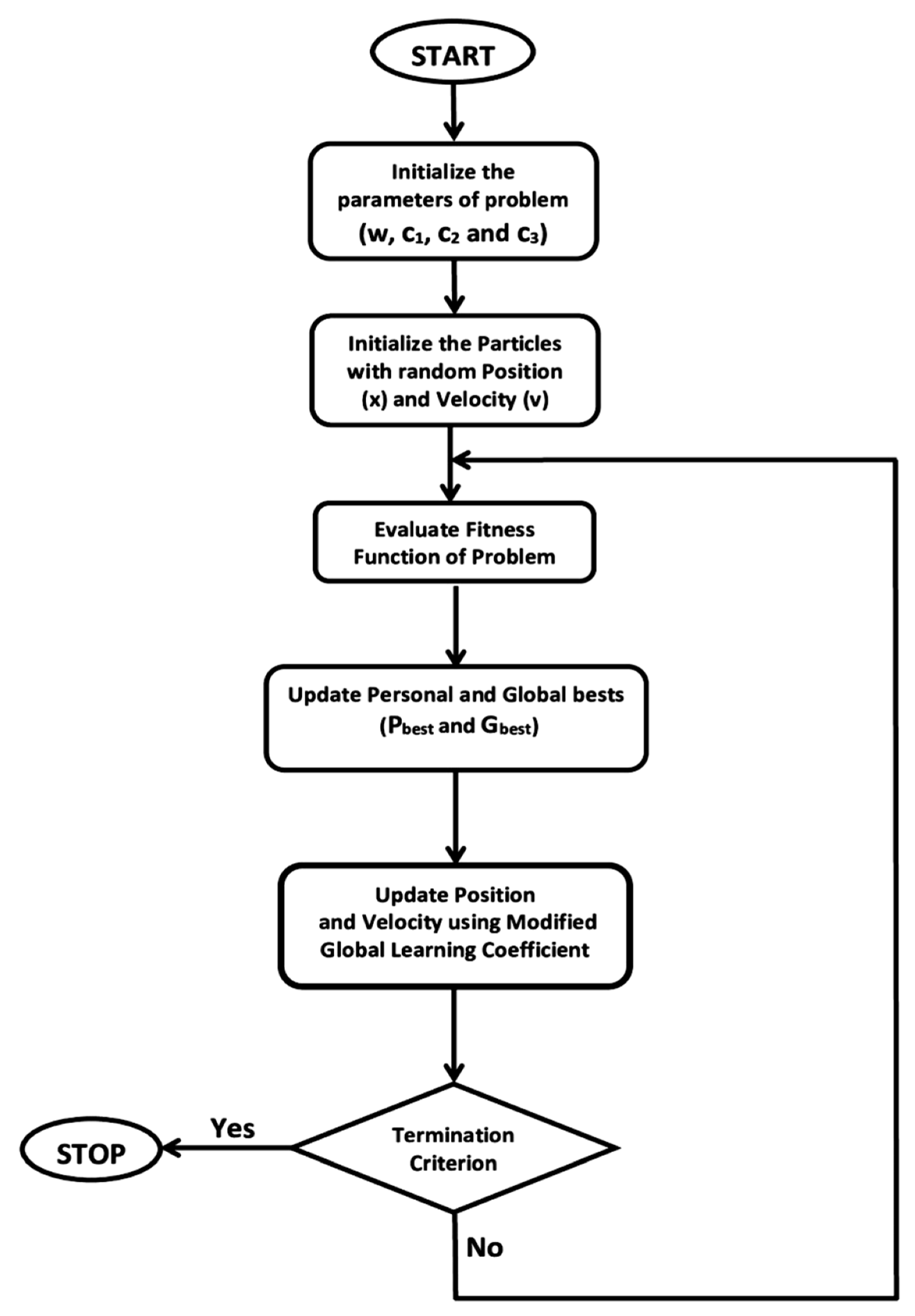
4.3. Modified Particle Swarm Optimization (PSO)
5. Implementation and Results Discussion
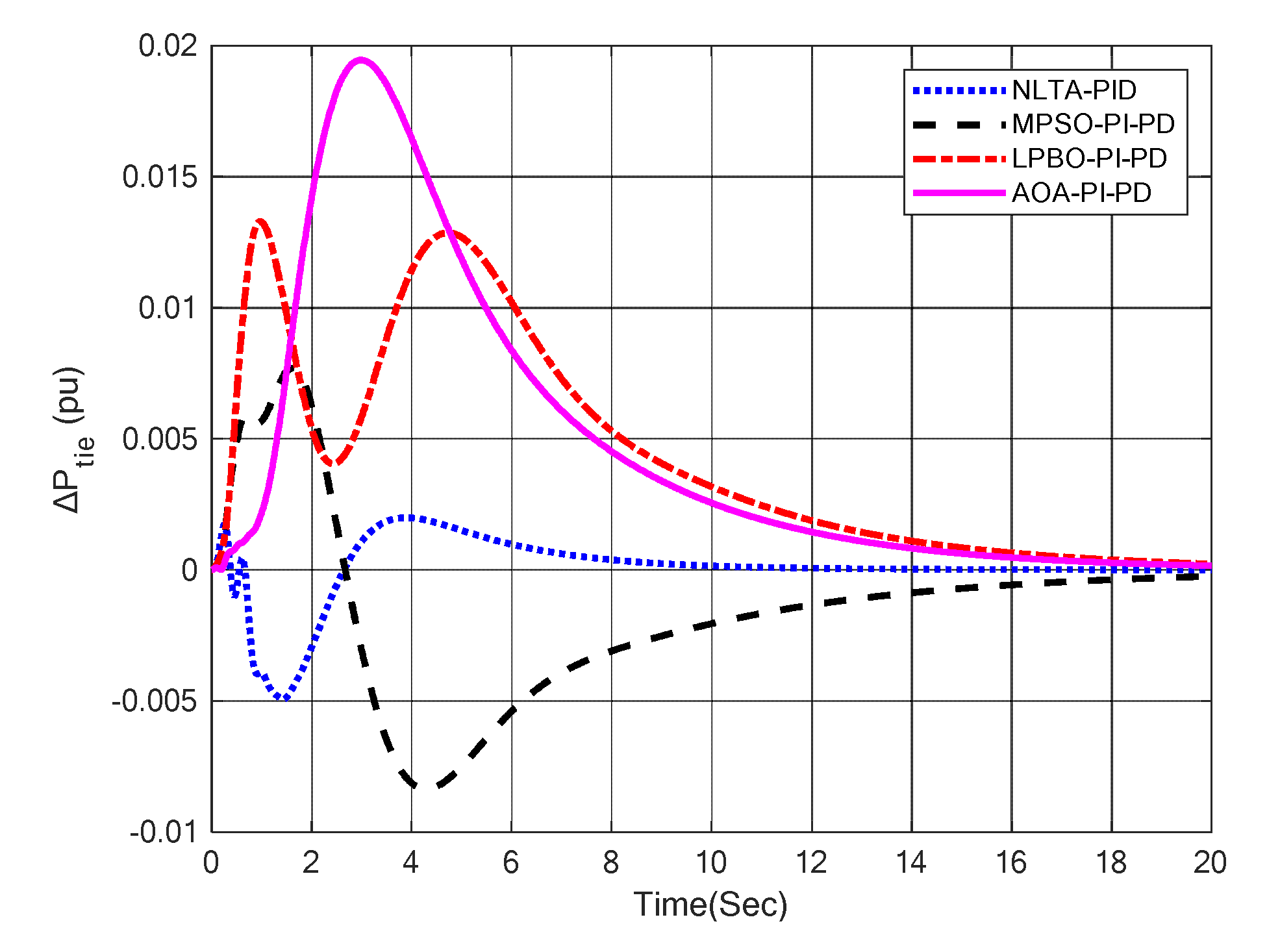
5.1. Optimization of Two-Area Interconnected Power System
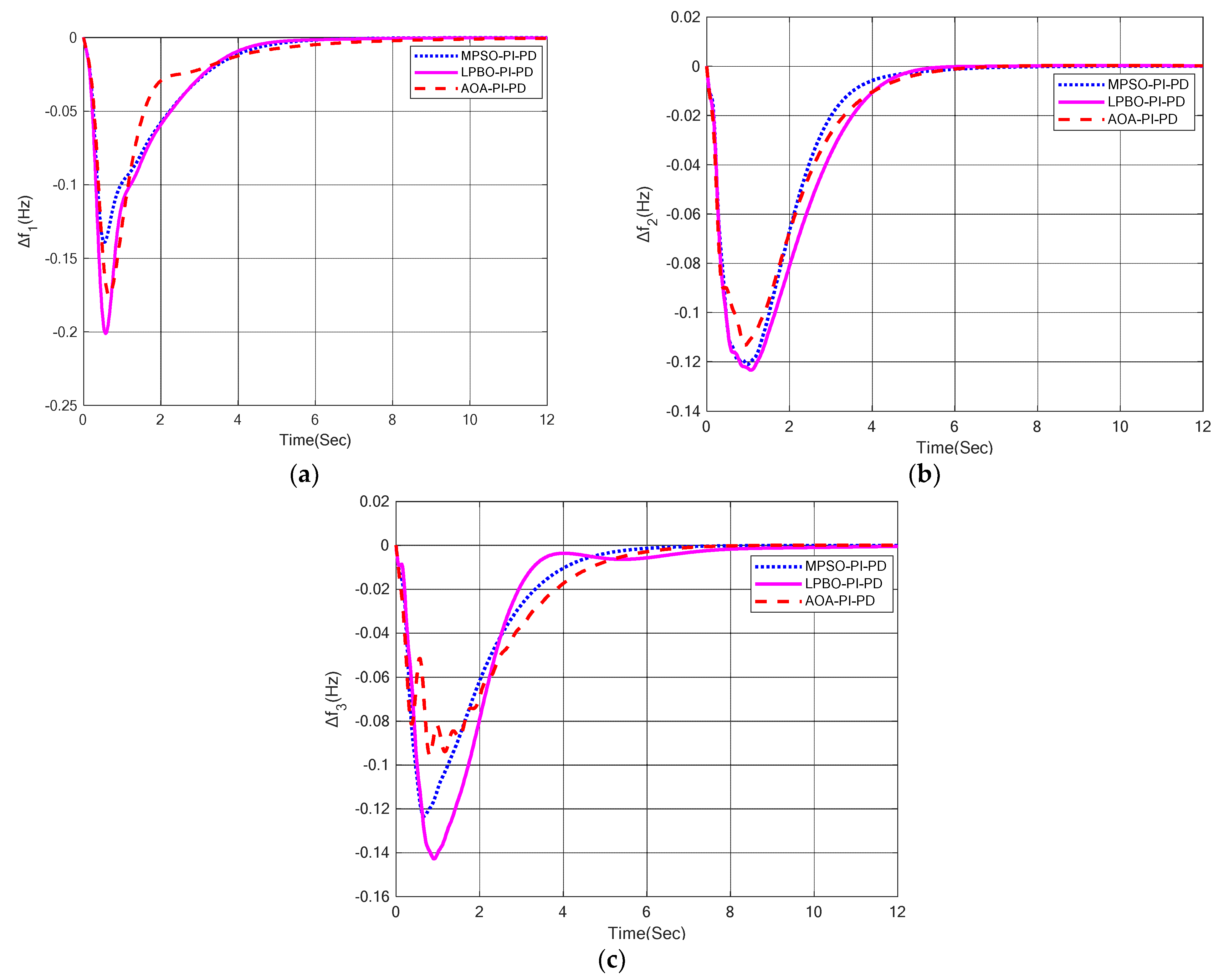
5.2. Three-Area, Three-Source System
5.3. Sensitivity Analysis
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sr. No. | Area-1 | Area-2 | ||
|---|---|---|---|---|
| System’s Parameter | Value | System’s Parameter | Value | |
| 1 | B1 | 1 | B2 | 1 |
| 2 | R1 | 2.4 | R2 | 1.2 |
| 3 | KG1 | 1 | KG2 | 1 |
| 4 | TG1 | 0.08 | TG2 | 0.12 |
| 5 | Kt1 | 1 | Kt2 | 1 |
| 6 | Tt1 | 0.3 | Tt2 | 0.15 |
| 7 | ΔPD1 | 0.02 | ΔPD2 | 0.02 |
| 8 | Kp1 | 120 | Kp2 | 100 |
| 9 | Tp1 | 20 | Tp2 | 10 |
| 10 | Ka1 | 10 | Ka2 | 10 |
| 11 | Ta1 | 0.1 | Ta2 | 0.1 |
| 12 | Ke1 | 1 | Ke2 | 1.5 |
| 13 | Te1 | 0.4 | Te2 | 0.6 |
| 14 | Kg1 | 1 | Kg2 | 1.5 |
| 15 | Tg1 | 1 | Tg2 | 1.5 |
| 16 | Ks1 | 1 | Ks2 | 1 |
| 17 | Ts1 | 0.01 | Ts2 | 0.01 |
| 18 | G1 | 1.5 | G6 | 1.5 |
| 19 | G2 | 0.3 | G7 | 0.3 |
| 20 | G3 | 0.1 | G8 | 0.1 |
| 21 | G4 | 1.4 | G9 | 1.4 |
| 22 | G5 | 0.5 | G10 | 0.5 |
| 23 | T12 | 0.545 | T21 | 0.545 |
Appendix B
| Sr. No. | Area-1 | Area-2 | Area-3 | |||
|---|---|---|---|---|---|---|
| System’s Parameter | Value | System’s Parameter | Value | System’s Parameter | Value | |
| 1 | B1 | 1 | B2 | 1 | B3 | 1 |
| 2 | R1 | 2.4 | R2 | 1.20 | R3 | 1.20 |
| 3 | KG1 | 1 | KG2 | 1 | KG3 | 1 |
| 4 | TG1 | 0.08 | TG2 | 0.12 | TG3 | 0.12 |
| 5 | Kt1 | 1 | Kt2 | 1 | Kt3 | 1 |
| 6 | Tt1 | 0.3 | Tt2 | 0.15 | Tt3 | 0.15 |
| 7 | ΔPD1 | 0.02 | ΔPD2 | 0.02 | ΔPD3 | 0.02 |
| 8 | Kp1 | 120 | Kp2 | 100 | Kp3 | 100 |
| 9 | Tp1 | 20 | Tp2 | 10 | Tp3 | 10 |
| 10 | Ka1 | 10 | Ka2 | 10 | Ka3 | 10 |
| 11 | Ta1 | 0.1 | Ta2 | 0.1 | Ta3 | 0.1 |
| 12 | Ke1 | 1 | Ke2 | 1.5 | Ke3 | 1.8 |
| 13 | Te1 | 0.4 | Te2 | 0.6 | Te3 | 0.8 |
| 14 | Kg1 | 1 | Kg2 | 1.5 | Kg3 | 1.8 |
| 15 | Tg1 | 1 | Tg2 | 1.5 | Tg3 | 1.8 |
| 16 | Ks1 | 1 | Ks2 | 1 | Ks3 | 1 |
| 17 | Ts1 | 0.01 | Ts2 | 0.01 | Ts3 | 0.01 |
| 18 | G1 | 1.5 | G6 | 1.5 | G11 | 1.5 |
| 19 | G2 | 0.3 | G7 | 0.3 | G12 | 0.3 |
| 20 | G3 | 0.1 | G8 | 0.1 | G13 | 0.1 |
| 21 | G4 | 1.4 | G9 | 1.4 | G14 | 1.4 |
| 22 | G5 | 0.5 | G10 | 0.5 | G15 | 0.5 |
| 23 | T12 | 0.545 | T21 | 0.545 | T31 | 0.545 |
| 24 | T13 | 0.545 | T23 | 0.545 | T32 | 0.545 |
| Sr. No. | Area-1 | Area-2 | Area-3 | |||
|---|---|---|---|---|---|---|
| System’s Parameter | Value | System’s Parameter | Value | System’s Parameter | Value | |
| 1 | Tg1 (+50%) | 1.5 | Tg2 (+50%) | 2.25 | Tg3 (+50%) | 2.7 |
| Tg1 (Nominal) | 1 | Tg2 (Nominal) | 1.5 | Tg3 (Nominal) | 1.8 | |
| Tg1 (−50%) | 0.5 | Tg2 (−50%) | 0.75 | Tg3 (−50%) | 0.9 | |
| 2 | Tt1 (+50%) | 0.45 | Tt2 (+50%) | 0.225 | Tt3 (+50%) | 0.225 |
| Tt1 (Nominal) | 0.3 | Tt2 (Nominal) | 0.15 | Tt3 (Nominal) | 0.15 | |
| Tt1 (−50%) | 0.15 | Tt2 (−50%) | 0.075 | Tt3 (−50%) | 0.075 | |
References
- Kalyan, C.N.S.; Goud, B.S.; Reddy, C.R.; Bajaj, M.; Sharma, N.K.; Alhelou, H.H.; Siano, P.; Kamel, S. Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System. Energies 2022, 15, 629. [Google Scholar] [CrossRef]
- Ghosh, A.; Ray, A.K.; Nurujjaman; Jamshidi, M. Voltage and frequency control in conventional and PV integrated power systems by a particle swarm optimized Ziegler–Nichols based PID controller. SN Appl. Sci. 2021, 3, 1–13. [Google Scholar] [CrossRef]
- Prakash, A.; Parida, S.K. Combined Frequency and Voltage Stabilization of Thermal-Thermal System with UPFC and RFB. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Fayek, H.H.; Rusu, E. Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids. Sustainability 2022, 14, 9428. [Google Scholar] [CrossRef]
- Nahas, N.; Abouheaf, M.; Sharaf, A.M.; Gueaieb, W. A Self-Adjusting Adaptive AVR-LFC Scheme for Synchronous Generators. IEEE Trans. Power Syst. 2019, 34, 5073–5075. [Google Scholar] [CrossRef]
- Gupta, A.; Chauhan, A.; Khanna, R. Design of AVR and ALFC for single area power system including damping control. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS 2014), Chandigarh, India, 6–8 March 2014; pp. 6–8. [Google Scholar] [CrossRef]
- Chandrashekar, M.J.; Jayapal, R. AGC and AVR implementation in a deregulated power system using optimized controller with Renewable integrated DC link. In Proceedings of the 2019 1st International Conference on Advanced Technologies in Intelligent Control, Environment, Computing & Communication Engineering (ICATIECE 2019), Bangalore, India, 19–20 March 2019; pp. 355–364. [Google Scholar] [CrossRef]
- Rajbongshi, R.; Saikia, L.C. Coordinated performance of interline power flow controller and superconducting magnetic energy storage in combined ALFC and AVR system under deregulated environment. J. Renew. Sustain. Energy 2018, 10, 044102. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Combined frequency and voltage stabilisation of multi-area multisource system by DE-AEFA optimised PID controller with coordinated performance of IPFC and RFBs. Int. J. Ambient Energy 2020, 1–17. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Frequency and voltage stabilisation in combined load frequency control and automatic voltage regulation of multiarea system with hybrid generation utilities by AC/DC links. Int. J. Sustain. Energy 2020, 39, 1009–1029. [Google Scholar] [CrossRef]
- Sahani, A.K.; Raj, U.; Shankar, R.; Mandal, R.K. Firefly Optimization Based Control Strategies for Combined Load Frequency Control and Automatic Voltage Regulation for Two-Area Interconnected Power System. Int. J. Electr. Eng. Inform. 2019, 11, 747–758. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K. Combined load frequency and terminal voltage control of power systems using moth flame optimization algorithm. J. Electr. Syst. Inf. Technol. 2019, 6, 1–24. [Google Scholar] [CrossRef]
- Grover, H.; Verma, A.; Bhatti, T.S. Load frequency control & automatic voltage regulation for a single area power system. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON 2020), Sonepat, India, 28 February–1 March 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Salman, G.; Jafar, A.S.; Ismael, A.I. Application of artificial intelligence techniques for LFC and AVR systems using PID controller. Int. J. Power Electron. Drive Syst. (IJPEDS) 2019, 10, 1694–1704. [Google Scholar] [CrossRef]
- Kouba, N.E.Y.; Menaa, M.; Hasni, M.; Boudour, M. Optimal control of frequency and voltage variations using PID controller based on Particle Swarm Optimization. In Proceedings of the 2015 4th International Conference on Systems and Control (ICSC), Sousse, Tunisia, 28–30 April 2015; pp. 424–429. [Google Scholar] [CrossRef]
- Safiullah, S.; Rahman, A.; Lone, S.A. State-observer based IDD controller for concurrent frequency-voltage control of a hybrid power system with electric vehicle uncertainties. Int. Trans. Electr. Energy Syst. 2021, 31, e13083. [Google Scholar] [CrossRef]
- Mohammadikia, R.; Nikoofard, A.; Tavakoli-Kakhki, M. Application of MPC for an automatic voltage regulator and load frequency control of interconnected power system. In Proceedings of the 2020 28th Iranian Conference on Electrical Engineering (ICEE), Tabriz, Iran, 4–6 August 2020. [Google Scholar] [CrossRef]
- Eke, I.; Saka, M.; Gozde, H.; Arya, Y.; Taplamacioglu, M.C. Heuristic optimization based dynamic weighted state feedback approach for 2DOF PI-controller in automatic voltage regulator. Eng. Sci. Technol. Int. J. 2021, 24, 899–910. [Google Scholar] [CrossRef]
- Wagle, R.; Sharma, P.; Sharma, C.; Gjengedal, T.; Pradhan, C. Bio-inspired hybrid BFOA-PSO algorithm-based reactive power controller in a standalone wind-diesel power system. Int. Trans. Electr. Energy Syst. 2021, 31. [Google Scholar] [CrossRef]
- Prasad, S.; Purwar, S.; Kishor, N. Load frequency regulation using observer based non-linear sliding mode control. Int. J. Electr. Power Energy Syst. 2018, 104, 178–193. [Google Scholar] [CrossRef]
- Panigrahi, N.; Nayak, A.; Mishra, S.R. Morphology of the Alumina Nanoparticles for the Arrangement of the KF Stacked Nano–γ–Al2O3 as Catalyst for Conversion of Biomass to Fuel. In Advances in Energy Technology; Springer: Berlin/Heidelberg, Germany, 2021; pp. 125–132. [Google Scholar]
- Daraqz, A.; Malik, S.A.; Waseem, A.; Azar, A.T.; Haq, I.U.; Ullah, Z.; Aslam, S. Automatic generation control of multi-source interconnected power system using FOI-TD controller. Energies 2021, 14, 5867. [Google Scholar] [CrossRef]
- Guo, J. Application of a novel adaptive sliding mode control method to the load frequency control. Eur. J. Control 2020, 57, 172–178. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. Design and analysis of BFOA-optimized fuzzy PI/PID controller for AGC of multi-area traditional/restructured electrical power systems. Soft Comput. 2016, 21, 6435–6452. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Mokhlis, H.; Haq, I.U.; Laghari, G.F.; Mansor, N.N. Fitness Dependent Optimizer-Based Automatic Generation Control of Multi-Source Interconnected Power System with Non-Linearities. IEEE Access 2020, 8, 100989–101003. [Google Scholar] [CrossRef]
- Raj, U.; Shankar, R. Deregulated Automatic Generation Control using Novel Opposition-based Interactive Search Algorithm Cascade Controller Including Distributed Generation and Electric Vehicle. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 1233–1251. [Google Scholar] [CrossRef]
- Kose, E. Optimal Control of AVR System with Tree Seed Algorithm-Based PID Controller. IEEE Access 2020, 8, 89457–89467. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Goud, B.S.; Reddy, C.R.; Ramadan, H.S.; Bajaj, M.; Ali, Z.M. Water Cycle Algorithm Optimized Type II Fuzzy Controller for Load Frequency Control of a Multi-Area, Multi-Fuel System with Communication Time Delays. Energies 2021, 14, 5387. [Google Scholar] [CrossRef]
- Tripathy, S.; Debnath, M.K.; Kar, S.K. Optimal Design of Fractional Order 2DOF-PID Controller for Frequency Control in Interconnected System. In Green Technology for Smart City and Society; Springer: Singapore, 2020; pp. 23–33. [Google Scholar] [CrossRef]
- Sahu, P.C.; Prusty, R.C.; Sahoo, B.K. Modified sine cosine algorithm-based fuzzy-aided PID controller for automatic generation control of multiarea power systems. Soft Comput. 2020, 24, 12919–12936. [Google Scholar] [CrossRef]
- Ajithapriyadarsini, S.; Mary, P.M.; Iruthayarajan, M.W. Automatic generation control of a multi-area power system with renewable energy source under deregulated environment: Adaptive fuzzy logic-based differential evolution (DE) algorithm. Soft Comput. 2019, 23, 12087–12101. [Google Scholar] [CrossRef]
- Çelik, E. Design of new fractional order PI–fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems. Soft Comput. 2020, 25, 1193–1217. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Mokhlis, H.; Haq, I.U.; Zafar, F.; Mansor, N.N. Improved-Fitness Dependent Optimizer Based FOI-PD Controller for Automatic Generation Control of Multi-Source Interconnected Power System in Deregulated Environment. IEEE Access 2020, 8, 197757–197775. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Haq, I.U.; Khan, K.B.; Laghari, G.F.; Zafar, F. Modified PID controller for automatic generation control of multi-source interconnected power system using fitness dependent optimizer algorithm. PLoS ONE 2020, 15, e0242428. [Google Scholar] [CrossRef] [PubMed]
- Biswas, S.; Roy, P.K.; Chatterjee, K. FACTS-based 3DOF-PID Controller for LFC of Renewable Power System Under Deregulation Using GOA. IETE J. Res. 2021, 1–14. [Google Scholar] [CrossRef]
- Fathy, A.; Kassem, A.M.; Abdelaziz, A.Y. Optimal design of fuzzy PID controller for deregulated LFC of multi-area power system via mine blast algorithm. Neural Comput. Appl. 2018, 32, 4531–4551. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Azar, A.T.; Aslam, S.; Alkhalifah, T.; Alturise, F. Optimized Fractional Order Integral-Tilt Derivative Controller for Frequency Regulation of Interconnected Diverse Renewable Energy Resources. IEEE Access 2022, 10, 43514–43527. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, T.; Ma, S.; Chen, M. Dandelion Optimizer: A nature-inspired metaheuristic algorithm for engineering applications. Eng. Appl. Artif. Intell. 2022, 114. [Google Scholar] [CrossRef]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2019, 53, 2237–2264. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Transient search optimization: A new meta-heuristic optimization algorithm. Appl. Intell. 2020, 50, 3926–3941. [Google Scholar] [CrossRef]
- Rahman, C.M.; Rashid, T.A. A new evolutionary algorithm: Learner performance based behavior algorithm. Egypt. Inform. J. 2020, 22, 213–223. [Google Scholar] [CrossRef]
- Fathy, A.; Alharbi, A.G.; Alshammari, S.; Hasanien, H.M. Archimedes optimization algorithm based maximum power point tracker for wind energy generation system. Ain Shams Eng. J. 2021, 13, 101548. [Google Scholar] [CrossRef]
- Zou, H.; Li, H. Tuning of PI–PD controller using extended non-minimal state space model predictive control for the stabilized gasoline vapor pressure in a stabilized tower. Chemom. Intell. Lab. Syst. 2015, 142, 1–8. [Google Scholar] [CrossRef]
- Raja, G.L.; Ali, A. New PI-PD Controller Design Strategy for Industrial Unstable and Integrating Processes with Dead Time and Inverse Response. J. Control. Autom. Electr. Syst. 2021, 32, 266–280. [Google Scholar] [CrossRef]
- Kaya, I. Optimal PI–PD Controller Design for Pure Integrating Processes with Time Delay. J. Control. Autom. Electr. Syst. 2021, 32, 563–572. [Google Scholar] [CrossRef]
- Irshad, M.; Ali, A. Robust PI-PD controller design for integrating and unstable processes. IFAC-PapersOnLine 2020, 53, 135–140. [Google Scholar] [CrossRef]
- Peram, M.; Mishra, S.; Vemulapaty, M.; Verma, B.; Padhy, P.K. Optimal PI-PD and I-PD Controller Design Using Cuckoo Search Algorithm. In Proceedings of the 5th International Conference on Signal Processing and Integrated Networks, Delhi, India, 22–23 February 2018; pp. 643–646. [Google Scholar] [CrossRef]
- Deniz, F.N.; Yüce, A.; Tan, N. Tuning of PI-PD Controller Based on Standard Forms for Fractional Order Systems. J. Appl. Nonlinear Dyn. 2018, 8, 5–23. [Google Scholar] [CrossRef]
- Zheng, M.; Huang, T.; Zhang, G. A New Design Method for PI-PD Control of Unstable Fractional-Order System with Time Delay. Complexity 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Ali, T.; Adeel, M.; Malik, S.A.; Amir, M. Stability Control of Ball and Beam System Using Heuristic Computation Based PI-D and PI-PD Controller. Tech. J. Univ. Eng. Technol. 2019, 24, 21–29. [Google Scholar]
- Tian, D.; Shi, Z. MPSO: Modified particle swarm optimization and its applications. Swarm Evol. Comput. 2018, 41, 49–68. [Google Scholar] [CrossRef]























| Reference | Year | Research Area | Controller | Tuning Schemes | Area/System | Nonlinearities | Additional Incorporation |
|---|---|---|---|---|---|---|---|
| [2] | 2021 | AVR-LFC | PID | PSO-ZN | Two Area | - | - |
| [3] | 2020 | AVR-LFC | PI, PIDF | CSA | Two Area | - | RFBs, UPFC |
| [4] | 2022 | AVR-LFC | PIDA | DPO | Two Area | - | |
| [5] | 2019 | AVR-LFC | PID | NLTA | Single Area | - | - |
| [6] | 2014 | AVR-LFC | PI | Not given | Single Area | - | Damper Winding |
| [7] | 2019 | AVR-LFC | PID, FLC | Fuzzy Logic | Two Area | - | DC Link, Deregulated Environment |
| [8] | 2018 | AVR-LFC | PIDF, PIDµF | LSA | Two Area | GDB, GRC | SMES, IPFC, Deregulated Environment |
| [9] | 2020 | AVR-LFC | PID | DE-AEFA | Two Area | GRC | IPFC and RFBs |
| [10] | 2020 | AVR-LFC | PID | DE-AEFA | Two Area | GRC | HVDC link with the existing AC tie-line |
| [11] | 2019 | AVR-LFC | PID | FO | Two Area | - | - |
| [12] | 2019 | AVR-LFC | FO-PID | MFO | Two Area | GDB, BD | - |
| [13] | 2020 | AVR-LFC | PI | HIL Strategy | Single Area | - | - |
| [14] | 2019 | AVR-LFC | PID | FA, GA, PSO | Single Area | - | - |
| [15] | 2015 | AVR-LFC | PID | PSO | Two Area | - | - |
| [16] | 2018 | AVR-LFC | SO-IDD | MBO | Two Area | GRC, GDB | - |
| [17] | 2020 | AVR-LFC | MPC | MPC | Two Area | - | - |
| [18] | 2020 | AVR | 2DOF state-feedback PI control | VSA, WOA, SCA GWO, SSA, WCA | AVR for Synchronous Generator | - | - |
| [19] | 2021 | AVR | PI | Hybrid BFOA-PSO | Standalone Wind–Diesel Power System | - | STATCOM |
| [20] | 2019 | LFC | Observer-based nonlinear sliding mode control | LMI | Two Area | GRC, GDB | - |
| [21] | 2021 | LFC | PID | MOL | Two Area | GDB | - |
| Proposed Work | 2022 | AVR-LFC | PI-PD | AOA, LPBO, MPSO | Two Area, Three Area | - | - |
| Acronym | Definition | Acronym | Definition |
|---|---|---|---|
| AOA | Archimedes optimization algorithm | IPS | Interconnected power system |
| NLTA | Nonlinear threshold-accepting algorithm | LPBO | Learner performance-based behavior optimization |
| AVR | Automatic voltage regulator | ΔPtie | Tie-line power deviation |
| PI-PD | Proportional integral–proportional derivative | Vt | Terminal voltage |
| MPSO | Modified particle swarm optimization | LFC | Load frequency control |
| Ri | Speed regulation | Δf | Frequency deviation |
| KG | Governor gain | B | Area bias factor |
| TG | Time constant of governor | ΔPD | Load deviation |
| Ka | Amplifier gain | Kt | Turbine gain |
| Ta | Time constant of amplifier | Tt | Time constant of turbine |
| Kg | Generator gain | Ke | Exciter gain |
| Tg | Time constant of generator | Te | Time constant of exciter |
| Kp | Power system gain | ΔXG | Valve position of governor |
| Tp | Time constant of power system | ΔPG | Deviation in the output of generator |
| T12, T21 | Tie-line synchronizing time constants | Ki | Coupling coefficient of AVR-LFC loops |
| MPSO | LPBO | AOA | |||
|---|---|---|---|---|---|
| Parameter | Value | Parameter | Value | Parameter | Value |
| Population size | 20 | Population size | 20 | Population size | 20 |
| Iterations | 10 | Iterations | 10 | Iterations | 10 |
| Inertia Weight Damping Ratio | 1 | Crossover Percentage | 0.7 | C1 (constant) | 2 |
| Personal Learning Coefficient | 2.74 | Mutation Percentage | 0.3 | C2 (constant) | 6 |
| Global Learning Coefficient | 2.88 | Mutation Rate | 0.03 | C3 (constant) | 2 |
| Max. Velocity Limit | 0.2 | Number of Mutants | 6 | C4 (constant) | 0.5 |
| Min. Velocity Limit | −0.2 | Number of Offspring | 14 | Range of Normalization (u,l) | 0.9, 0.1 |
| Area | Controller Parameters | NLTA-PID [5] | Controller Parameters | Proposed Control Schemes | ||
|---|---|---|---|---|---|---|
| MPSO-PI-PD | LPBO-PI-PD | AOA-PI-PD | ||||
| Area-1 | Kp1 | 1.995 | Kp1 | 1.061 | 1.064 | 1.61 |
| Ki1 | 1.943 | Ki1 | 0.630 | 1.396 | 1.512 | |
| Kd1 | 1.079 | Kp2 | 1.162 | 1.071 | 1.88 | |
| Kp2 | 1.994 | Kd1 | 1.621 | 1.795 | 1.263 | |
| Ki2 | 1.295 | Kp3 | 1.063 | 1.850 | 1.01 | |
| Kd2 | 1.107 | Ki2 | 1.419 | 0.772 | 1.68 | |
| - | - | Kp4 | 0.812 | 0.140 | 0.68 | |
| - | - | Kd2 | 0.283 | 0.483 | 0.37 | |
| Area-2 | Kp3 | 1.956 | Kp5 | 0.564 | 0.965 | 0.90 |
| Ki3 | 1.919 | Ki3 | 0.792 | 0.667 | 0.67 | |
| Kd3 | 0.655 | Kp6 | 0.775 | 0.670 | 1.44 | |
| Kp4 | 1.283 | Kd3 | 1.106 | 0.616 | 1.60 | |
| Ki4 | 0.586 | Kp7 | 1.903 | 1.522 | 1.50 | |
| Kd4 | 0.819 | Ki4 | 1.376 | 1.325 | 1.85 | |
| - | - | Kp8 | 0.799 | 0.507 | 0.74 | |
| - | - | Kd4 | 0.822 | 0.526 | 0.52 | |
| ITSE | 2.84 | ITSE | 0.250 | 0.164 | 0.1892 | |
| Area-1 | Area-2 | |||||||
|---|---|---|---|---|---|---|---|---|
| Control Scheme | Settling Time | % Overshoot | Undershoot | s-s Error | Settling Time | % Overshoot | Undershoot | s-s Error |
| NLTA-PID [5] | 2.1204 | 0.0005 | −0.285 | 0 | 2.592 | 0 | −0.275 | 0 |
| MPSO-PI-PD | 4.5407 | 0 | −0.13 | 0 | 4.92 | 0 | −0.135 | 0 |
| LPBO-PI-PD | 6.9478 | 0.005 | −0.135 | 0 | 4.043 | 0 | −0.17 | 0 |
| AOA-PI-PD | 6.6752 | 0 | −0.115 | 0 | 4.69 | 0 | −0.12 | 0 |
| Control Scheme | Area-1 | Area-2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Rise Time | Settling Time | % Overshoot | s-s Error | Rise Time | Settling Time | % Overshoot | s-s Error | |
| NLTA-PID [5] | 0.1287 | 1.24 | 18.80 | 0 | 0.154 | 0.887 | 17.75 | 0 |
| MPSO-PI-PD | 0.6532 | 3.30 | 0 | 0 | 1.077 | 3.17 | 3.2971 × 10−4 | 0 |
| LPBO-PI-PD | 0.4546 | 1.22 | 0.28 | 0 | 0.464 | 1.381 | 0 | 0 |
| AOA-PI-PD | 0.610 | 1.23 | 0.27 | 0 | 0.435 | 1.499 | 0 | 0 |
| Area | Controller Parameters | Proposed Control Schemes | ||
|---|---|---|---|---|
| MPSO-PI-PD | LPBO-PI-PD | AOA-PI-PD | ||
| Area-1 | Kp1 | 1.0995 | 0.66 | 1.51 |
| Ki1 | 1.1028 | 0.59 | 1.29 | |
| Kp2 | 1.2737 | 0.96 | −0.38 | |
| Kd1 | 0.831 | 0.53 | 0.55 | |
| Kp3 | 1.5371 | 1.56 | 0.88 | |
| Ki2 | 1.965 | 1.62 | 1.91 | |
| Kp4 | 1.2543 | 0.85 | 1.13 | |
| Kd2 | 0.5936 | 0.56 | 0.5 | |
| Area-2 | Kp5 | 1.1106 | 0.77 | 0.86 |
| Ki3 | 0.9076 | 0.61 | 0.71 | |
| Kp6 | 0.8639 | 1.48 | 1.55 | |
| Kd3 | 1.3118 | 1.03 | 0.86 | |
| Kp7 | 1.7917 | 1.68 | 1.91 | |
| Ki4 | 1.8286 | 1.57 | 1.97 | |
| Kp8 | 0.9068 | 0.83 | 1.074 | |
| Kd4 | 0.6882 | 0.73 | 1.071 | |
| Area-3 | Kp9 | 0.7914 | 0.78 | 1.9 |
| Ki5 | 1.0795 | 1.12 | 1.26 | |
| Kp10 | 1.2741 | 0.66 | 1.64 | |
| Kd5 | 0.8581 | 1.56 | 0.42 | |
| Kp11 | 1.2282 | 1.29 | 1.63 | |
| Ki6 | 1.4326 | 1.3 | 1.69 | |
| Kp12 | 0.9527 | 0.77 | 1.43 | |
| Kd6 | 0.5874 | 0.45 | 1.33 | |
| ITSE | 0.3507 | 0.34485 | 0.4853 | |
| Area | Control Scheme | Settling Time | % Overshoot | Undershoot | s-s Error |
|---|---|---|---|---|---|
| Area-1 | MPSO-PI-PD | 5.43 | 0 | −0.14 | 0 |
| LPBO-PI-PD | 4.65 | 0 | −0.20 | 0 | |
| AOA-PI-PD | 6.73 | 0 | −0.175 | 0 | |
| Area-2 | MPSO-PI-PD | 5.04 | 0 | −0.120 | 0 |
| LPBO-PI-PD | 4.87 | 0 | −0.122 | 0 | |
| AOA-PI-PD | 5.46 | 0 | −0.115 | 0 | |
| Area-3 | PSO-PI-PD | 5.40 | 0 | −0.122 | 0 |
| LPBO-PI-PD | 7.16 | 0 | −0.143 | 0 | |
| AOA-PI-PD | 6.40 | 0 | −0.095 | 0 |
| Area | Control Scheme | Rise Time | Settling Time | % Overshoot | s-s Error |
|---|---|---|---|---|---|
| Area-1 | MPSO-PI-PD | 1.53 | 3.48 | 5.8225 × 10−6 | 0 |
| LPBO-PI-PD | 1.15 | 3.01 | 4.5973 × 10−4 | 0 | |
| AOA-PI-PD | 1.13 | 2.15 | 0.083 | 0 | |
| Area-2 | MPSO-PI-PD | 0.95 | 2.44 | 0 | 0 |
| LPBO-PI-PD | 0.98 | 2.37 | 0 | 0 | |
| AOA-PI-PD | 1.09 | 1.92 | 0.37 | 0 | |
| Area-3 | MPSO-PI-PD | 1.32 | 3.30 | 0 | 0 |
| LPBO-PI-PD | 0.48 | 3.48 | 0.001 | 0 | |
| AOA-PI-PD | 1.75 | 3.29 | 0 | 0 |
| Parameters/Variation | Settling Time (LFC and AVR) | |||||
|---|---|---|---|---|---|---|
| Δf1 | Δf2 | Δf3 | Vt1 | Vt2 | Vt3 | |
| Nominal Tg, Tt | 4.65 | 4.87 | 7.16 | 3.01 | 2.37 | 3.48 |
| Tg1, Tg2, Tg3/+50% | 4.60 | 4.76 | 7.02 | 2.74 | 2.11 | 3.56 |
| Tg1, Tg2, Tg3/−50% | 4.71 | 4.95 | 7.32 | 3.25 | 2.59 | 3.56 |
| Tt1, Tt2, Tt3/+50% | 4.63 | 5.01 | 7.18 | 3.03 | 2.38 | 3.48 |
| Tt1, Tt2, Tt3/−50% | 4.60 | 4.71 | 7.11 | 2.99 | 2.36 | 3.48 |
| Parameters/Variation | %Overshoot (LFC and AVR) | %Undershoot (LFC) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Δf1 | Δf2 | Δf3 | Vt1 | Vt2 | Vt3 | Δf1 | Δf2 | Δf3 | |
| Nominal Tg, Tt | 0 | 0 | 0 | 0 | 0 | 0 | −0.2 | −0.122 | −0.143 |
| Tg1, Tg2, Tg3/+50% | 0 | 0 | 0 | 0 | 0 | 3.4 | −0.185 | −0.13 | −0.155 |
| Tg1, Tg2, Tg3/−50% | 0 | 0 | 0 | 0 | 0 | 0 | −0.215 | −0.125 | −0.13 |
| Tt1, Tt2, Tt3/+50% | 0 | 0 | 0 | 0 | 0 | 0 | −0.245 | −0.125 | −0.15 |
| Tt1, Tt2, Tt3/−50% | 0 | 0 | 0 | 0 | 0 | 0 | −0.16 | −0.125 | −0.135 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, T.; Malik, S.A.; Hameed, I.A.; Daraz, A.; Mujlid, H.; Azar, A.T. Load Frequency Control and Automatic Voltage Regulation in a Multi-Area Interconnected Power System Using Nature-Inspired Computation-Based Control Methodology. Sustainability 2022, 14, 12162. https://doi.org/10.3390/su141912162
Ali T, Malik SA, Hameed IA, Daraz A, Mujlid H, Azar AT. Load Frequency Control and Automatic Voltage Regulation in a Multi-Area Interconnected Power System Using Nature-Inspired Computation-Based Control Methodology. Sustainability. 2022; 14(19):12162. https://doi.org/10.3390/su141912162
Chicago/Turabian StyleAli, Tayyab, Suheel Abdullah Malik, Ibrahim A. Hameed, Amil Daraz, Hana Mujlid, and Ahmad Taher Azar. 2022. "Load Frequency Control and Automatic Voltage Regulation in a Multi-Area Interconnected Power System Using Nature-Inspired Computation-Based Control Methodology" Sustainability 14, no. 19: 12162. https://doi.org/10.3390/su141912162
APA StyleAli, T., Malik, S. A., Hameed, I. A., Daraz, A., Mujlid, H., & Azar, A. T. (2022). Load Frequency Control and Automatic Voltage Regulation in a Multi-Area Interconnected Power System Using Nature-Inspired Computation-Based Control Methodology. Sustainability, 14(19), 12162. https://doi.org/10.3390/su141912162