
Early Wildfire Detection Technologies in Practice—A Review


Abstract
:1. Introduction
1.1. Environmental Impact
1.2. Health Impact
1.3. Sociological Impact
1.4. Economic Impact
2. Literature Review
2.1. Review Methods
2.2. Discussion
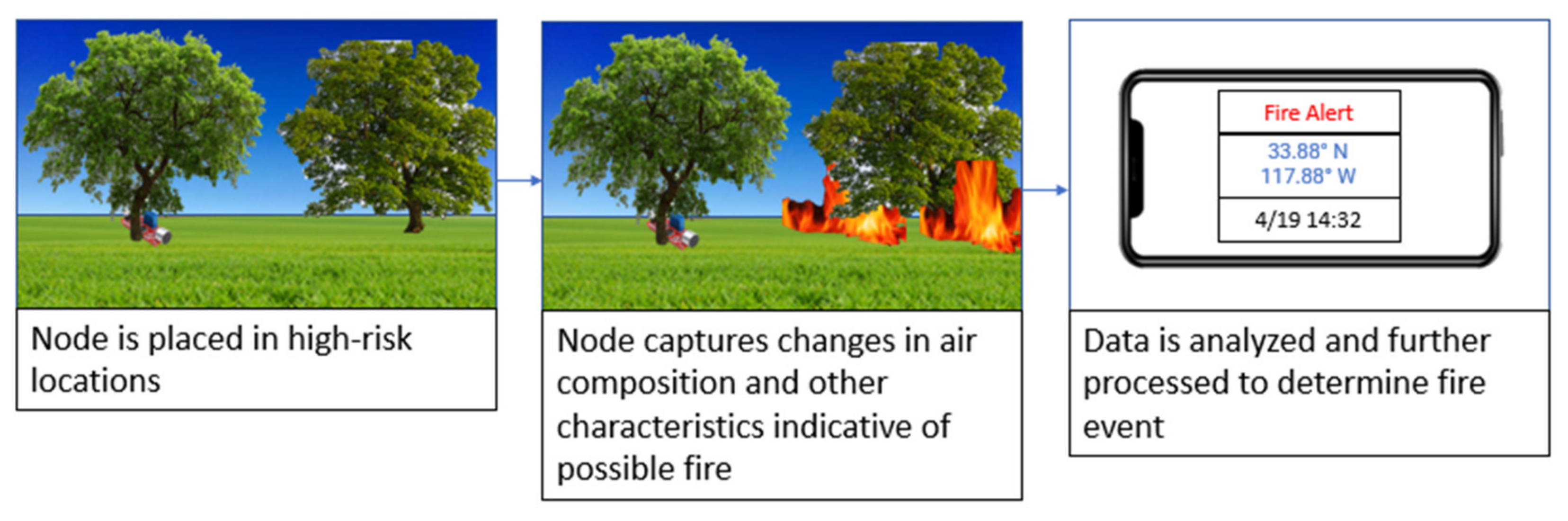
2.2.1. Sensor Nodes
- Advantages:
- Challenges:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Prototype/Reference | Location | Sensor Types | Range | Communication Type | Processing | Power Source | Year |
|---|---|---|---|---|---|---|---|
| FireWxNet [39] | USA | Temperature, relative humidity, wind speed and direction | 138–393 m | 900–930 MHz radio | ATmega128 | Solar (two panel, 24 V and 12 V) and four batteries (12 V) | 2006 |
| Bayo et al. [40] | Spain | Temperature (NTC), relative humidity (H25K5A, SHT11), pressure (MS5540B), soil moisture (Decagon EC5), light intensity (S8265) | 100 m (comm) | XBee/LR-WPAN | ATmega1281 | Two AA batteries | 2010 |
| Firoxio [41] | Lebanon | Relative humidity and temperature (SHT10), smoke, carbon monoxide (MQ-5) | Unknown | Zigbee | PIC16F877A | Solar (17.26 V), 700 mAh lithium-ion battery | 2014 |
| Yan et al. [32] | China | Relative humidity and temperature (SHT11), smoke (MS5100), carbon monoxide (EC805-CO), carbon dioxide (S-100) | 20 m | Zigbee | 8051 (included in CC2430) | Solar (12 V 7 W) | 2016 |
| Molina-Pico et al. [42] | Spain | Relative humidity and temperature (SHT75), gas (carbon monoxide, carbon dioxide) | 25 m (SN), 1.6 km (CN) | 433 MHz ISM between SN and GW, 868–870 MHz and GSM/GPRS between GW and CN | PIC24FJ256GB110 for CN, MSP430 for SN | 600 mAh Lithium coin battery | 2016 |
| Lutakamale and Kaijage [43] | Tanzania | Temperature (LM35DZ), smoke (MQ-2), relative humidity and temperature (DHT22) | 100–120 m (SN to GW) | Zigbee between SN and GW, GSM/GPS between GW and CN | Arduino Uno | Two 3.7 V rechargeable batteries | 2017 |
| SISVIA Vigilancia y Sequimiento Ambiental [44] | Spain | Waspmote gas board (temperature, humidity, light intensity, carbon monoxide, carbon dioxide) | 70 m | ZigBee | ATmega1281 | Rechargeable AA and solar panel | 2017 |
| Smart Forests [45] | Brazil | Temperature, relative humidity | 100 m | WPAN, Bluetooth Low Energy | N/A | Batteries | 2018 |
| Kadir [46] | Indonesia | Temperature, humidity, smoke, carbon dioxide | Unknown | ZigBee | Unknown | Direct power supply | 2018 |
| LADSensors [47] | Portugal | Temperature, humidity, air pressure, carbon dioxide | 300 m (SN) | LoRa | Unknown | Solar | 2018 |
| Silvanet (Dryad) [48] | Germany | Temperature, humidity, air pressure, gases (hydrogen, carbon monoxide, etc.) (BME 688) | 100 m | LoRaWAN | STM microcontroller | Solar and supercapacitors for energy storage | 2019 |
| Khalid [28] | Turkey | IR flame (760–1100 nm), smoke (MQ-2), light, temperature and humidity (DHT-22) | 250 m | NRF24L01+ (2.4 GHz RF) | ATmega328p | Two Iithium-ion cells (3.7 V) | 2019 |
| Knotifire [49] | Canada | Unknown | Surface fire | Internet | Unknown | Energy harvested from fire | 2020 |
| BurnMonitor [50] | France and US | Humidity, temperature | 50 m | 3G | Unknown | Unknown | 2020 |
| Benzekri et al. [51] | Morocco | Temperature, humidity, air pressure (BME280), particulates (Nova SDS011), carbon dioxide (MH-Z14A-CO2), carbon monoxide (ZE07-CO) | Unknown | LoRa | Lora32u4 (ATmega32u4-based) | Solar, lithium-polymer and lithium-ion batteries | 2020 |
| U. Dampage et al. [31] | Sri Lanka | Temperature, humidity (DHT22), light intensity (LDR), carbon monoxide (MQ9) | 5 m | 2.4–2.5 GHz ISM | Arduino Nano | Solar panel and rechargeable lithium-ion cell | 2022 |
| N5 sensors [52] | USA | Proprietary nanowire-based gas sensor array, IR camera, particulate matter detector | Unknown | LoRa | Unknown | Solar panel and rechargeable 30,000 mAh battery | 2022 |
2.2.2. Unmanned Aerial Vehicles (UAV)
- Advantages:
- Challenges:
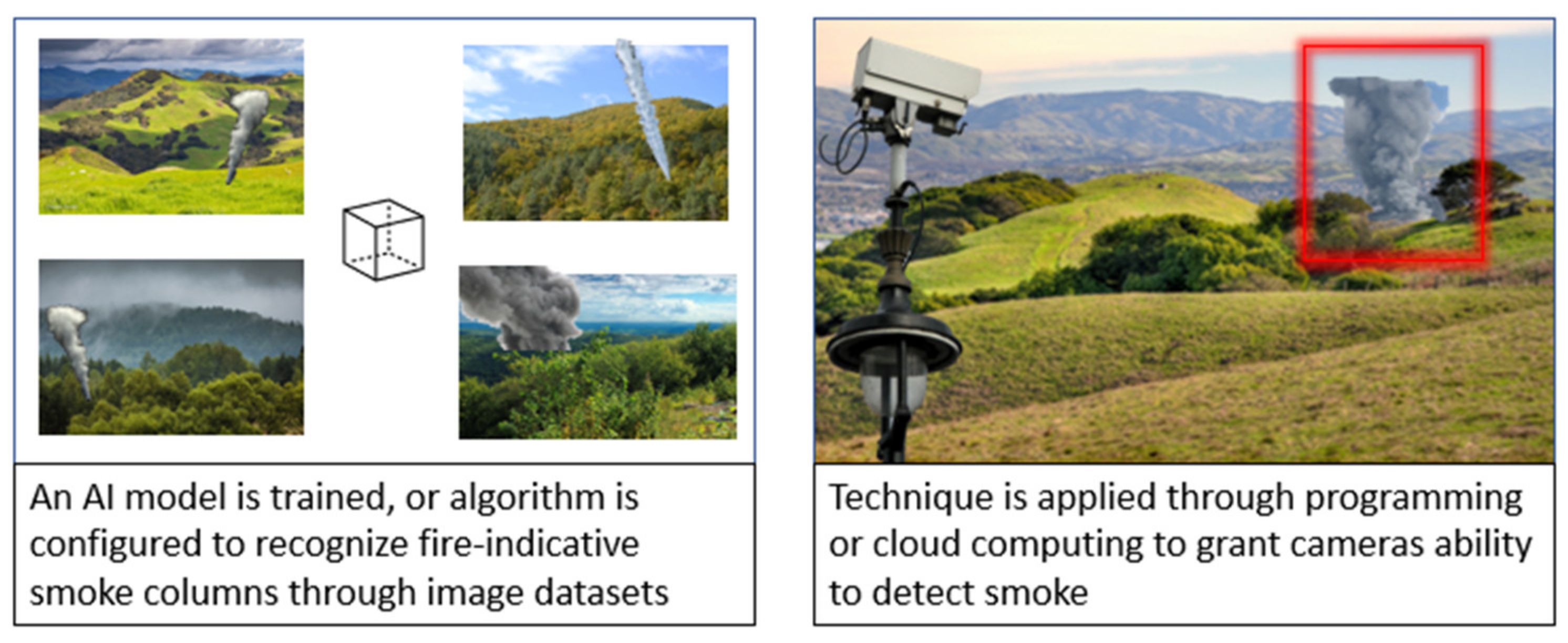
2.2.3. Stationary Camera Networks
- Advantages:
- Challenges:
2.2.4. Satellite Surveillance
- Advantages:
- Challenges:
| Instrument | Notes | Launch Date |
|---|---|---|
| Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) [100] |
| 1987 |
| Advanced Very High-Resolution Radiometer (AVHRR) (NOAA) [101] |
| 1978–1994 |
| Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) [102] |
| 18 December 1999 |
| Moderate Resolution Imaging Spectroradiometer (MODIS) [103] |
| Dec 1999 (Terra); May 2002 (Aqua) |
| Multi-angle Imaging SpectroRadiometer (MISR) [104] |
| 18 December 1999 |
| Measurement of Pollution in the Troposphere (MOPITT) [105] |
| 18 December 1999 |
| Atmospheric Infrared Sounder (AIRS) [106] |
| 4 May 2002 |
| Cloud Aerosol Lidar with Orthogonal Polarization (CALIOP) [107] |
| 28 April 2006 |
| Visible Infrared Imaging Radiometer Suite (VIIRS) [108] |
| 28 October 2011 |
| Hyperspectual Thermal Emission Spectrometer (HyTES) [109] |
| July 2012 |
| Landsat 8 [110] |
| 2013 |
| ECOsystem Spaceborne Thermal Radiometer Experiment on Space Station (ECOSTRESS) [111] |
| 29 June 2018 |
3. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pausas, J.G.; Keeley, J.E. Wildfires as an ecosystem service. Front. Ecol. Environ. 2019, 17, 289–295. [Google Scholar] [CrossRef]
- The European Space Agency. New Long-Term Dataset to Analyse Global Fire Trends; The European Space Agency: Paris, France, 2021. [Google Scholar]
- National Fire News: National Preparedness Level 2; National Interagency Fire Center: Boise, ID, USA, 2022.
- Available online: https://www.fire.ca.gov/incidents/ (accessed on 25 July 2022).
- California Department of Fish and Wildlife. 2022. Available online: https://wildlife.ca.gov/Science-Institute/Wildfire-Impacts (accessed on 29 June 2022).
- Steel, Z.L.; Collins, B.M.; Sapsis, D.B.; Stephens, S.L. Quantifying pyrodiversity and its drivers. R. Soc. Publ. 2021, 288, 20203202. [Google Scholar] [CrossRef] [PubMed]
- Erb, W.M.; Barrow, E.J.; Hofner, A.N.; Utami-Atmoko, S.S.; Vogel, E.R. Wildfire smoke impacts activity and energetics of wild Bornean orangutans. Sci. Rep. 2018, 8, 7606. [Google Scholar] [CrossRef] [PubMed]
- Wintle, B.A.; Legge, S.; Woinarski, J.C.Z. After the Megafires: What Next for Australian Wildlife? Trends Ecol. Evol. 2020, 35, 753–757. [Google Scholar] [CrossRef] [PubMed]
- Godfree, R.C.; Knerr, N.; Encinas-Viso, F.; Albrecht, D.; Bush, D.; Cargill, D.C.; Clements, M.; Gueidan, C.; Guja, L.K.; Harwood, T.; et al. Implications of the 2019–2020 megafires for the biogeography and conservation of Australian vegetation. Nat. Commun. 2021, 1023, 12. [Google Scholar] [CrossRef] [PubMed]
- California Air Resources Board. 2020. Available online: https://ww2.arb.ca.gov/ghg-inventory-data (accessed on 29 July 2022).
- Geng, G.; Murray, N.L.; Tong, D.; Fu, J.S.; Hu, X.; Lee, P.; Meng, X.; Chang, H.H.; Liu, Y. Satellite-Based Daily PM2.5 Estimates During Fire Seasons in Colorado. JGR Atmos. 2018, 123, 8159–8171. [Google Scholar] [CrossRef]
- Stowell, J.D.; Yang, C.-E.; Fu, J.S.; Scovronick, N.C.; Strickland, M.J.; Liu, Y. Asthma exacerbation due to climate change-induced wildfire smoke in the Western US. Environ. Res. Lett. 2021, 17, 014023. [Google Scholar] [CrossRef]
- Stowell, J.D.; Geng, G.; Saikawa, E.; Chang, H.H.; Fu, J.; Yang, C.-E.; Zhu, Q.; Liu, Y.; Strickland, M.J. Associations of wildfire smoke PM2.5 exposure with cardiorespiratory events in Colorado 2011–2014. Environ. Int. 2019, 133, 105151. [Google Scholar] [CrossRef]
- Reid, C.E.; Brauer, M.; Johnston, F.H.; Jerrett, M.; Balmes, J.R.; Elliott, C.T. Critical Review of Health Impacts of Wildfire Smoke Exposure. Env. Health Perspect 2016, 124, 1334–1343. [Google Scholar] [CrossRef]
- Holm, S.M.; Miller, M.D.; Balmes, J.R. Health effects of wildfire smoke in children and public health tools: A narrative review. J. Expo. Sci. Environ. Epidemiol. 2021, 31, 1–20. [Google Scholar] [CrossRef]
- Rundle, A.; Hoepner, L.; Hassoun, A.; Oberfield, S.; Freyer, G.; Holmes, D.; Reyes, M.; Quinn, J.; Camann, D.; Perera, F.; et al. Association of Childhood Obesity With Maternal Exposure to Ambient Air Polycyclic Aromatic Hydrocarbons During Pregnancy. Am. J. Epidemiol. 2012, 175, 1163–1172. [Google Scholar] [CrossRef]
- Rosa, M.J.; Hair, G.M.; Just, A.C.; Kloog, I.; Svensson, K.; Pizano-Zárate, M.L.; Pantic, I.; Schnaas, L.; Tamayo-Ortiz, M.; Baccarelli, A.A.; et al. Identifying critical windows of prenatal particulate matter (PM 2.5) exposure and early childhood blood pressure. Environ. Res. 2020, 182, 109073. [Google Scholar]
- Johnston, F.H.; Henderson, S.B.; Chen, Y.; Randerson, J.T.; Marlier, M.; Defries, R.S.; Kinney, P.; Bowman, D.M.J.S.; Brauer, M. Estimated Global Mortality Attributable to Smoke from Landscape Fires. Environ. Health Perspect 2012, 120, 695–701. [Google Scholar] [CrossRef]
- US Fire Administration. Administration, Socioeconomic Factors and the Incidence of Fire; National Fire Data Center: Washington, DC, USA, 2017.
- Masri, S.; Scaduto, E.; Jin, Y.; Wu, J. Disproportionate Impacts of Wildfires among Elderly and Low-Income Communities in California from 2000–2020. Int. J. Environ. Res. Public Health 2021, 18, 3921. [Google Scholar] [CrossRef]
- Gin, J.L.; Balut, M.D.; Der-Martirosian, C.; Dobalian, A. Managing the unexpected: The role of homeless service providers during the 2017–2018 California wildfires. J. Community Psychol. 2021, 49, 2532–2547. [Google Scholar] [CrossRef]
- Ma, A.L.; Loughland, M.E.D.; Lapcharoensap, W.; Dukhovny, D.; Lee, H.C. California and Oregon NICU Wildfire Disaster Preparedness Tools. Children 2021, 8, 465. [Google Scholar] [CrossRef]
- Robinne, F.-N.; Hallem, D.W.; Bladon, K.D.; Flannigan, M.D.; Boisramé, G.; Bréthaut, C.M.; Doerr, S.H.; Baldassarre, G.D.; Gallagher, L.A.; Hohner, A.K.; et al. Scientists’ warning on extreme wildfire risks to water supply. Hydrol. Process. 2021, 35, e14086. [Google Scholar] [CrossRef]
- Barbosa, J.V.; Nunes, R.A.O.; Alvim-Ferraz, M.C.M.; Martins, F.G.; Sousa, S.I.V. Health and Economic Burden of the 2017 Portuguese Extreme Wildland Fires on Children. Int. J. Environ. Res. Public Health 2022, 1, 19. [Google Scholar] [CrossRef]
- Reiff, N. How Fire Season Affects the Economy, Investopedia, 28 February 2022. Available online: https://www.investopedia.com/how-fire-season-affects-the-economy-5194059#:~:text=As%20wildfires%20become%20a%20more,about%200.04%25%20over%20two%20years (accessed on 5 July 2022).
- Creative Commons Legal Code. Available online: https://creativecommons.org/licenses/by/3.0/legalcode (accessed on 21 July 2022).
- Varela, N.; Diaz-Martinez, L.J.; Ospino, A.; Zelaya, N.A.L. Wireless Sensor Network for Forest Fire Detection. Procedia Comput. Sci. 2020, 175, 435–440. [Google Scholar] [CrossRef]
- Khalid, W.; Sattar, A.; Qureshi, M.; Amin, A.; Malik, M.A.; Memon, K.H. A smart wireless sensor network mode for fire detection. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 2541–2556. [Google Scholar] [CrossRef]
- Ammar, M.B.; Souissi, R. A New Approach based on Wireless Sensor Network and Fuzzy Logic for Forest Fire Detection. Int. J. Comput. Appl. 2014, 89, 0975–8887. [Google Scholar]
- Bolourchi, P.; Uysal, S. Forest Fire Detection in Wireless Sensor Network Using Fuzzy Logic. In Proceedings of the Fifth International Conference on Computational Intelligence, Communication Systems and Networks, Riga, Latvia, 3–5 June 2013. [Google Scholar]
- Dampage, U.; Bandaranayake; Wanasinghe, R.; Kottahachchi, K.; Jayasanka, B. Fire detection system using wireless sensor networks and machine learning. Sci. Rep. 2022, 12, 46. [Google Scholar] [CrossRef]
- Yan, X.; Cheng, H.; Zhao, Y.; Yu, W.; Huang, H.; Zheng, X. Real-Time Identification of Smoldering and Flaming Combustion Phases in Forest Using a Wireless Sensor Network-Based Multi-Sensor System and Artificial Neural Network. Sensors 2016, 16, 1228. [Google Scholar] [CrossRef]
- Abbassi, M.A.E.; Jilbab, A.; Bourouhou, A. Efficient Forest Fire Detection System Based on Data Fusion Applied in Wireless Sensor Networks. Int. J. Electr. Eng. Inform. 2020, 12, 1–18. [Google Scholar] [CrossRef]
- Cruz, M.G.; Alexander, M.E. The 10% wind speed rule of thumb for estimating a wildfire’s forward rate of spread in forests and shrublands. Ann. For. Sci. 2019, 76, 44. [Google Scholar] [CrossRef]
- Natural Resources Canada. Canadian Forest Fire Weather Index (FWI) System. Available online: https://cwfis.cfs.nrcan.gc.ca/background/summary/fwi (accessed on 9 July 2022).
- Poulakis, M.I.; Vassaki, S.; Panagopoulos, A.D. Satellite-Based Wireless Sensor Networks: Radio Communication Link Design. In Proceedings of the 2013 7th European Conference on Antennas and Propagation (EuCAP), Gothenburg, Sweden, 8–12 April 2013. [Google Scholar]
- Nguyen, M.T.; Nguyen, C.V.; Do, H.T.; Hua, H.T.; Tran, T.A.; Nguyen, A.D.; Ala, G.; Viola, F. UAV-Assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey. Electronics 2021, 10, 2603. [Google Scholar] [CrossRef]
- News Release: DHS S&T Successfully Evaluates Wildfire Sensors with California Emergency Responders, 10 Jun 2021. Available online: https://www.dhs.gov/science-and-technology/news/2021/06/10/news-release-st-successfully-evaluates-wildfire-sensors (accessed on 28 July 2022).
- Hartung, C.; Han, R.; Seielstad, C.; Holbrook, S. FireWxNet: A multi-tiered portable wireless system for monitoring weather conditions in wildland fire environments. In Proceedings of the 4th International Conference on Mobile Systems, Applications, and Services (MobiSys 2006), Uppsala, Sweden, 19–22 June 2006. [Google Scholar]
- Bayo, A.; Antolin, D.; Medrano, N.; Calvo, B.; Celma, S. Development of a Wireless Sensor Network System for Early Forest Fire Detection. In Proceedings of the ITG-Fachbericht 224-RFID Systech, Ciudad, Spain, 15–16 June 2010. [Google Scholar]
- Owayjan, M.; Freiha, G.; Achkar, R.; Abdo, E.; Mallah, S. Firoxio: Forest Fire Detection and Alerting System. In Proceedings of the 17th IEEE Mediterranean Electrotechnical Conference, Beirut, Lebanon, 13–16 April 2014. [Google Scholar]
- Molina-Pico, A.; Cuesta-Frau, D.; Araujo, A.; Alejandre, J.; Rozas, A. Forest Monitoring and Wildland Early Fire Detection by a Heirarchical Wireless Sensor Network. J. Sens. 2016, 2016, 8325845. [Google Scholar] [CrossRef]
- Lutakamale, A.S.; Kaijage, S. Wildfire Monitoring and Detection System Using Wireless Sensor Network: A Case Study of Tanzania. Wirel. Sens. Netw. 2017, 9, 274–289. [Google Scholar] [CrossRef]
- Teixeira, J. Wireless Sensor Network for Forest Fire Detection; Universidade Do Porto: Porto, Portugal, 2017. [Google Scholar]
- Neumann, G.B.; de Almeida, V.P.; Endler, M. Smart Forests: Fire Detection Service. In Proceedings of the IEEE Symposium on Computers and Communications, Natal, Brazil, 25–28 June 2018. [Google Scholar]
- Kadir, E.A.; Rosa, S.L.; Yulianti, A. Application of WSNs for Detection Land and Forest Fire in Riau Province Indonesia. In Proceedings of the International Conference on Electrical Engineering and Computer Science, Pangkal, Indonesia, 2–4 October 2018. [Google Scholar]
- LADSensors—Firest Supervisor Early Wildfire Detection System. 2018. Available online: https://www.ladsensors.com/ (accessed on 23 July 2022).
- Silvanet Wildfire Detection. 2019. Available online: https://www.dryad.net/silvanet (accessed on 28 July 2022).
- Knotifire. 2020. Available online: https://www.knotifire.com/ (accessed on 28 July 2022).
- BurnMonitor: An Early Wildfire Detection IoT Solution, Inria. 2020. Available online: https://project.inria.fr/siliconvalley/2021/05/04/burnmonitor-an-early-wildfire-detection-iot-solution/ (accessed on 28 July 2022).
- Benzekri, W.; Moussati, A.E.; Moussaoui, O.; Berrajaa, M. Early Forest Fire Detection System using Wireless Sensor Network and Deep Learning. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 5. [Google Scholar] [CrossRef]
- ChemNode—N5 Sensors. 2022. Available online: https://secureservercdn.net/166.62.114.250/3xl.d5a.myftpupload.com/wp-content/uploads/2022/02/N5-ChemNode-Data-Sheet.pdf (accessed on 28 July 2022).
- National Wildfire Coordinating Group. NWCG Standards for Fire Unmanned Aircraft Systems Operations; National Wildfire Coordinating Group: Washington, DC, USA, 2019.
- Zhao, X.; Zhou, Z.; Zhu, X.; Guo, A. Design of a Hand-Launched Solar-Powered Unmanned Aerial Vehicle (UAV) System for Plateau. Appl. Sci. 2020, 10, 1300. [Google Scholar] [CrossRef]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne Optical and Thermal Remote Sensing for Wildfire Detection and Monitoring. Sensors 2016, 16, 1310. [Google Scholar]
- FOTOKITE, The Fotokite Sigma. A Situational Awareness System for First Responders, Perspective Robotics AG. 2022. Available online: https://fotokite.com/situational-awareness-system/ (accessed on 9 July 2022).
- Yuan, C.; Liu, Z.; Zhang, Y. UAV-based forest fire detection and tracking using image processing techniques. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; p. 640. [Google Scholar]
- Ball, M. Forest Fire Monitoring with Drones and Wind Sensors, Unmanned Systems Technology, 25 January 2021. Available online: https://www.unmannedsystemstechnology.com/2021/01/forest-fire-monitoring-with-drones-and-wind-sensors/ (accessed on 9 July 2022).
- Drone Amplified, Fight Fire with Fire, Drone Amplified. Available online: https://droneamplified.com/ignis/?v=7516fd43adaa (accessed on 9 July 2022).
- Lin, Z.; Liu, H.H.T.; Wotton, M. Kalman Filter-Based Large-Scale Wildfire Monitoring With a System of UAVs. IEEE Trans. Ind. Electron. 2019, 66, 606–615. [Google Scholar] [CrossRef]
- Bushnaq, O.M.; Chaaban, A.; Al-Naffouri, T.Y. The Role of UAV-IoT Networks in Future Wildfire Detection. IEEE Internet Things J. 2021, 8, 16984–16999. [Google Scholar] [CrossRef]
- Lewicki, T.; Liu, K. Multimodal Wildfire Surveillance with UAV. In Proceedings of the IEEE Global Communications Conference, Madrid, Spain, 7–11 December 2021. [Google Scholar]
- Jiao, Z.; Zhang, Y.; Mu, L.; Xin, J.; Jiao, S.; Liu, H.; Liu, D. A YOLOv3-based Learning Strategy for Real-time UAV-based Forest Fire Detection. In Proceedings of the IEEE Chinese Control and Decision Conference, Changsha, China, 22–24 August 2020. [Google Scholar]
- Tahir, H.U.A.; Waqar, A.; Khalid, S.; Usman, S.M. Wildfire Detection in Aerial Images Using Deep Learning. In Proceedings of the 2nd International Conference on Digital Futures and Transformative Technlogies, Rawalpindi, Pakistan, 24–26 May 2022. [Google Scholar]
- Bouguettaya, A.; Zarzour, H.; Taberkit, A.M.; Kechida, A. A review on early wildfire detection from unmanned aerial vehicles using deep learning-based computer vision algorithms. Signal Processing 2020, 190, 108309. [Google Scholar] [CrossRef]
- Barmputis, P.; Papaioanou, P.; Dimitropoulos, K.; Grammalidis, N. A Review on Early Forest Fire Detection Systems Using Optical Remote Sensing. Sensors 2020, 20, 6442. [Google Scholar] [CrossRef]
- Han, B.; Zhou, Y.; Deveerasetty, K.K.; Hu, C. A Review of Control Algorithms for Quadrotor. In Proceedings of the International Conference on Information and Automation, Wuyishan, China, 11–13 August 2018. [Google Scholar]
- Pham, H.X.; La, H.M.; Feil-Seifer, D.; Deans, M.C. A Distributed Control Framework of Multiple Unmanned Aerial Vehicles for Dynamic Wildfire Tracking. IEEE Trans. Syst. Man Cybern. 2020, 50, 1537–1548. [Google Scholar] [CrossRef]
- Mawanza, J.T.; Agee, J.T.; Bhero, E. Adaptive Finite-Time Time-Varying Elliptical Formation Control for a Group of Quadrotors UAVs for Cooperative Wildfire Monitoring. In Proceedings of the 30th Southern African Universities Power Engineering, Durban, South Africa, 25–27 January 2022. [Google Scholar]
- Shrestha, K.; Dubey, R.; Singandhupe, A.; Louis, S.; La, H. Multi Objective UAV Network Deployment for Dynamic Fire Coverage. In Proceedings of the IEEE Congress on Evolutionary Computation, Kraków, Poland, 28 June–1 July 2021. [Google Scholar]
- Kim, J.; Gadsden, A.A.; Wilkerson, S.A. A Comprehensive Survey of Control Strategies for Autonomous Quadrotors. Can. J. Electr. Comput. Eng. 2020, 43, 3–16. [Google Scholar] [CrossRef]
- Kangunde, V.; Jamisola, R.S., Jr.; Theophilus, E.K. A review on drones controlled in real-time. Int. J. Dyn. Control. 2021, 9, 1832–1846. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.A.; Rudin, K.; Lotz, R.; Siebenmann, D.; Leutenegger, S.; Alexis, K.; Siegwart, R. A solar-powered hand-launchable UAV for low-altitude multi-day continuous flight. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26 May 2015; pp. 3986–3993. [Google Scholar]
- Jung, S.; Jo, Y.; Kim, Y. Aerial Surveillance with Low-Altitude Long-Endurance Tethered Multirotor UAVs Using Photovoltaic Power Management System. Energies 2019, 12, 1323. [Google Scholar] [CrossRef]
- SolarXOne: Autonomous, Long Range and Solar Drone, XSun. 2019. Available online: https://xsun.fr/autonomous-drone/ (accessed on 22 July 2022).
- Shi, J.; Wang, W.; Gao, Y.; Yu, N. Optimal Placement and Intelligent Smoke Detection Algorithm for Wildfire-Monitoring Cameras; IEEE: Piscataway, NJ, USA, 2020; Volume 8, pp. 3–4. [Google Scholar]
- SmokeD, Automatic Fire and Smoke Detection System, SmokeD. Available online: https://smokedsystem.com/ (accessed on 10 July 2022).
- Alert Wildfire. 2014. Available online: https://www.alertwildfire.org/ (accessed on 27 July 2022).
- News Releases, Pacific Gas and Electric, 18 November 2021. Available online: https://www.pge.com/en_US/about-pge/media-newsroom/news-details.page?pageID=0553327b-df9e-4321-9b19-92b9297ec2d4&ts=1642273313274 (accessed on 27 July 2022).
- Pano AI. 2019. Available online: https://www.pano.ai/ (accessed on 27 July 2022).
- IQ FireWatch, IQ FireWatch Technology, IQ Firewatch. Available online: https://www.iq-firewatch.com/technology#arg3 (accessed on 10 July 2022).
- Planet, Linking Ground and Space Systems to Autonomously Assess Wildfires, Planet, 25 August 2020. Available online: https://learn.planet.com/rs/997-CHH-265/images/2020-08-25_Moore_MOFD_Case%20Study_Letter.pdf (accessed on 10 July 2022).
- Stipaničev, D.; Šerić, L.; Braović, M.; Krstinić, D.; Jakovčević, T.; Štula, M.; Bugarić, M.; Maras, J. Vision Based Wildfire and Natural Risk Observers; IEEE: Piscataway, NJ, USA, 2012; p. 6. [Google Scholar]
- He, K. Single Image Haze Removal Using Dark Channel Prior; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Agirman, K.T.A.K. BLSTM based night-time wildfire detection from video. PLoS ONE 2022, 17, e0269161. [Google Scholar] [CrossRef]
- Gutro, R. NASA Covers Wildfires Using Many Sources, NASA Goddard Space Flight Center, 9 December 2021. Available online: https://www.nasa.gov/mission_pages/fires/main/missions/index.html (accessed on 10 July 2022).
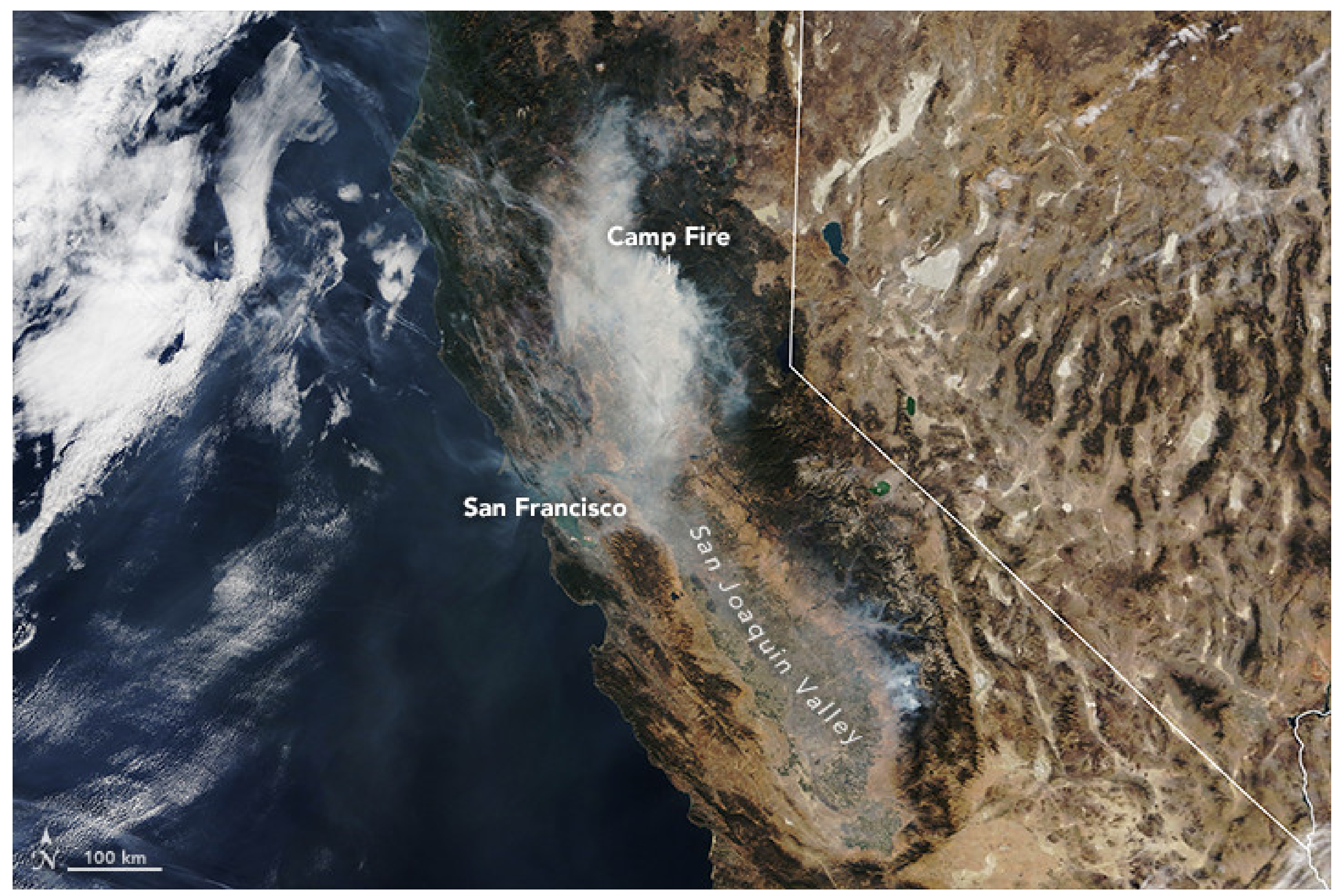
- Stevens, J. Smoke from Camp Fire Billows Across California, 14 November 2018. Available online: https://earthobservatory.nasa.gov/images/144252/smoke-from-camp-fire-billows-across-california (accessed on 13 July 2022).
- Matson, M.; Dozier, J. Identification of Subresolution High Temperature Sources Using a Thermal IR Sensor. Photogramm. Eng. Remote Sens. 1981, 47, 1311–1318. [Google Scholar]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 1789, 31–41. [Google Scholar] [CrossRef]
- Pereira, G.H.A.; Fusioka, A.M.; Nassu, B.T.; Minetto, R. Active Fire Detection in Landsat-8 Imagery: A Large-Scale Dataset and a Deep-Learning Study. J. Photogramm. Remote Sens. 2021, 178, 171–186. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Quayle, B.; Lorenz, E.; Morelli, F. Active fire detection using Landsat-8/OLI data. Remote Sens. Environ. 2016, 185, 210–220. [Google Scholar] [CrossRef] [Green Version]
- Rostami, A.; Shah-Hosseini, R.; Asgari, S.; Zarei, A.; Adhdami-Nia, M.; Homayouni, S. Acrive Fire Detection from Landsat-8 Imagery Using Multiple Kernel Learning. Remote Sens. 2022, 14, 992. [Google Scholar] [CrossRef]
- Johnstone, A. CubeSat Design Specification (1U-12U) rev 14.1, February 2022. Available online: https://static1.squarespace.com/static/5418c831e4b0fa4ecac1bacd/t/5f24997b6deea10cc52bb016/1596234122437/CDS+REV14+2020-07-31+DRAFT.pdf (accessed on 24 July 2022).
- Gangestad, J.W.; Rowen, D.W.; Hardy, B.S. Forest fires, sunglint, and a solar eclipse: Responsive remote sensing with AeroCube-4. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2014; pp. 3622–3625. [Google Scholar]
- Azami, M.H.; Orger, N.C.; Schulz, V.H.; Cho, M. Demonstration of Wildfire Detection Using Image Classification Onboard CubeSat. In Proceedings of the International Symposium on Geoscience and Remote Sensing, Brussels, Belgium, 11–16 July 2021. [Google Scholar]
- Azami, M.H.; Orger, N.C.; Schulz, V.H.; Oshiro, T.; Cho, M. Earth Observation Mission of a 6U CubeSat with a 5-meter Resolution for Wildfire Image Classification Using Convolutional Neural Network Approach. Remote Sens. 2022, 14, 1874. [Google Scholar] [CrossRef]
- OroraTech Home Page. 2018. Available online: https://ororatech.com/ (accessed on 24 July 2022).
- Interorbital Systems. 2022. Available online: https://www.interorbital.com/ (accessed on 24 July 2022).
- AVIRIS Airborne Visible/Infrared Imaging Spectrometer. Available online: https://aviris.jpl.nasa.gov/ (accessed on 28 July 2022).
- Advanced Very High Resolution Radiometer. Available online: https://www.eumetsat.int/avhrr (accessed on 28 July 2022).
- NASA. ASTER|Terra. Available online: https://terra.nasa.gov/about/terra-instruments/aster (accessed on 28 July 2022).
- NASA. MODIS Web. Available online: https://modis.gsfc.nasa.gov/ (accessed on 28 July 2022).
- NASA. Multi-Angle Imaging SpectroRadiometer. Available online: https://www.jpl.nasa.gov/missions/multi-angle-imaging-spectroradiometer-misr (accessed on 28 July 2022).
- NASA. MOPITT|Terra. Available online: https://terra.nasa.gov/about/terra-instruments/mopitt (accessed on 28 July 2022).
- NASA. AIRS. Available online: https://airs.jpl.nasa.gov/ (accessed on 28 July 2022).
- NASA. CALIPSO. Available online: https://www-calipso.larc.nasa.gov/about/payload.php#CALIOP (accessed on 28 June 2022).
- NOAA. Visible Infrared Imaging Radiometer Suite (VIIRS). Available online: https://www.nesdis.noaa.gov/current-satellite-missions/currently-flying/joint-polar-satellite-system/jpss-mission-and-2 (accessed on 28 June 2022).
- NASA. Welcome to Hyperspectral Thermal Emission Spectrometer Website. Available online: https://hytes.jpl.nasa.gov/ (accessed on 28 June 2022).
- NASA. Landsat 8|Landsat Science. Available online: https://landsat.gsfc.nasa.gov/satellites/landsat-8/ (accessed on 28 June 2022).
- NASA. Welcome to ECOSTRESS. Available online: https://ecostress.jpl.nasa.gov/ (accessed on 28 June 2022).






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohapatra, A.; Trinh, T. Early Wildfire Detection Technologies in Practice—A Review. Sustainability 2022, 14, 12270. https://doi.org/10.3390/su141912270
Mohapatra A, Trinh T. Early Wildfire Detection Technologies in Practice—A Review. Sustainability. 2022; 14(19):12270. https://doi.org/10.3390/su141912270
Chicago/Turabian StyleMohapatra, Ankita, and Timothy Trinh. 2022. "Early Wildfire Detection Technologies in Practice—A Review" Sustainability 14, no. 19: 12270. https://doi.org/10.3390/su141912270
APA StyleMohapatra, A., & Trinh, T. (2022). Early Wildfire Detection Technologies in Practice—A Review. Sustainability, 14(19), 12270. https://doi.org/10.3390/su141912270