
Assessment of Three Automated Identification Methods for Ground Object Based on UAV Imagery

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
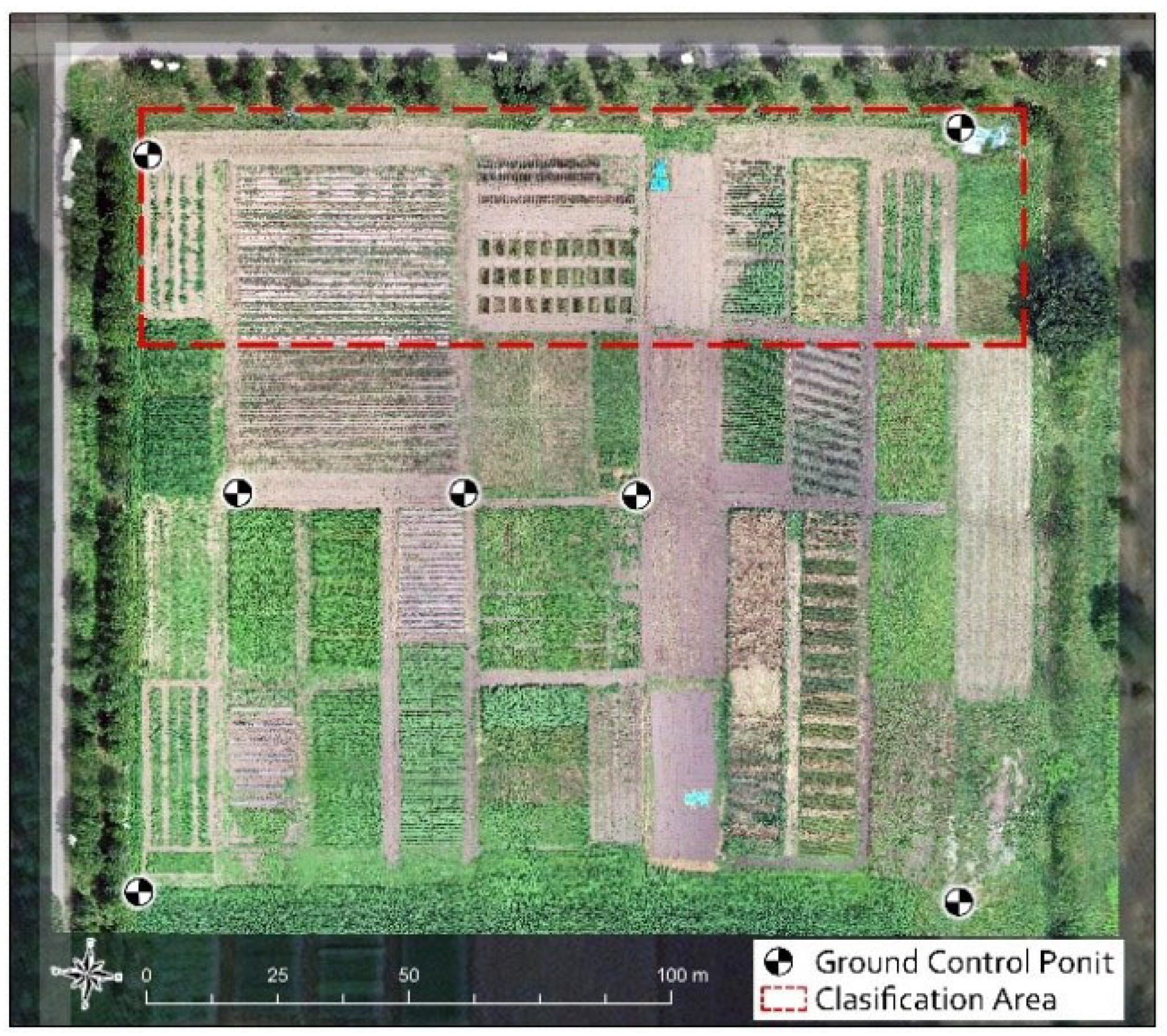
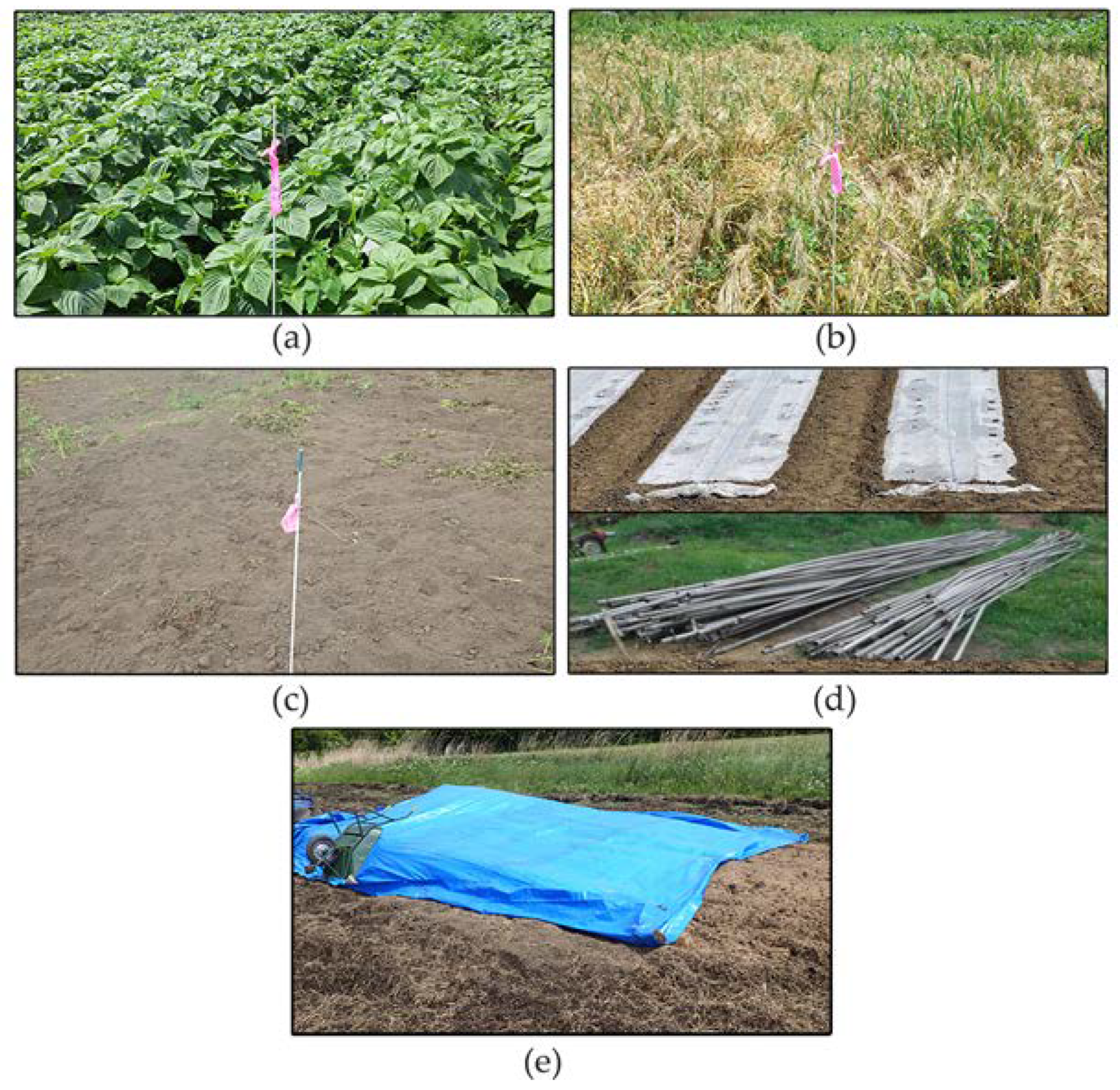
2.1. Study Site
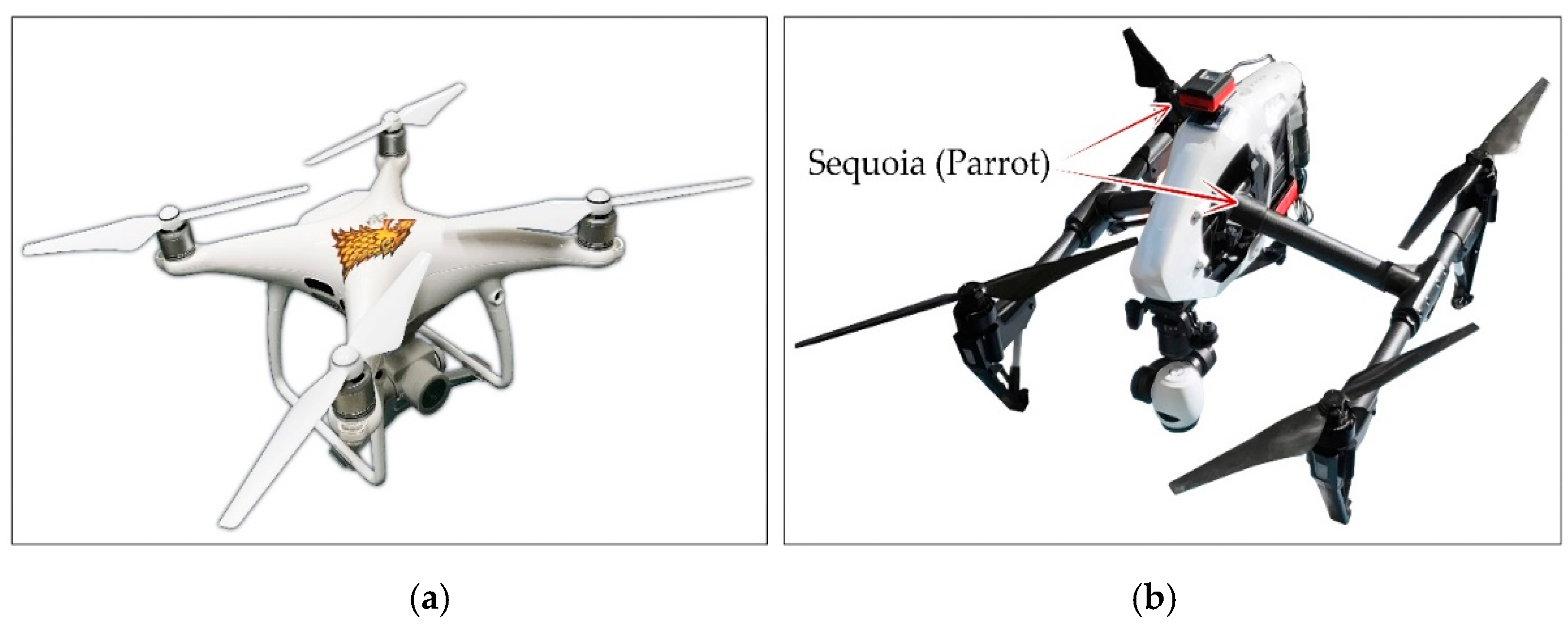
2.2. UAV Settings and Data Collection
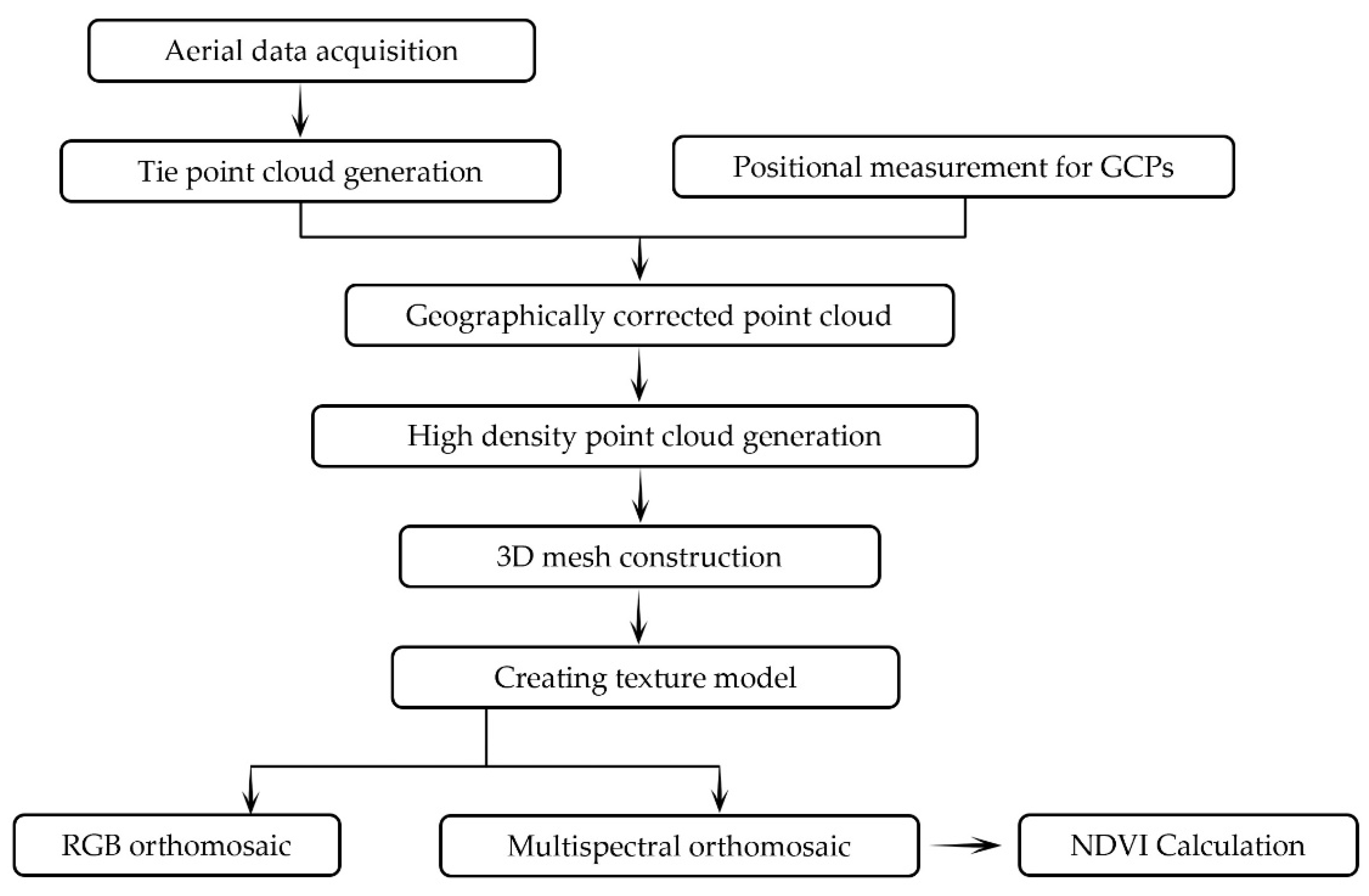
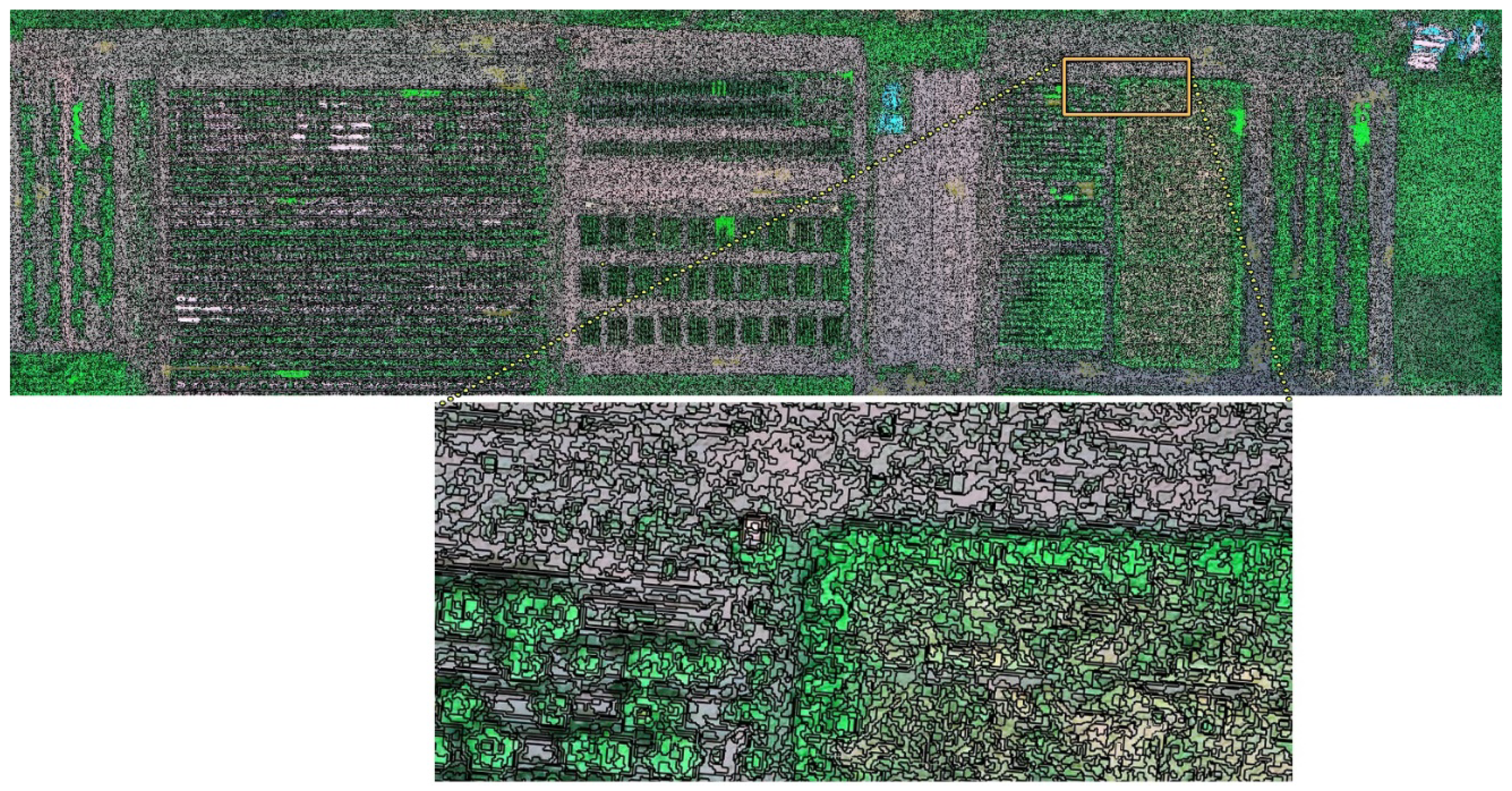
2.3. Structure from Motion Workflow
2.4. Classification Procedures
2.5. Accuracy Assessment
3. Results
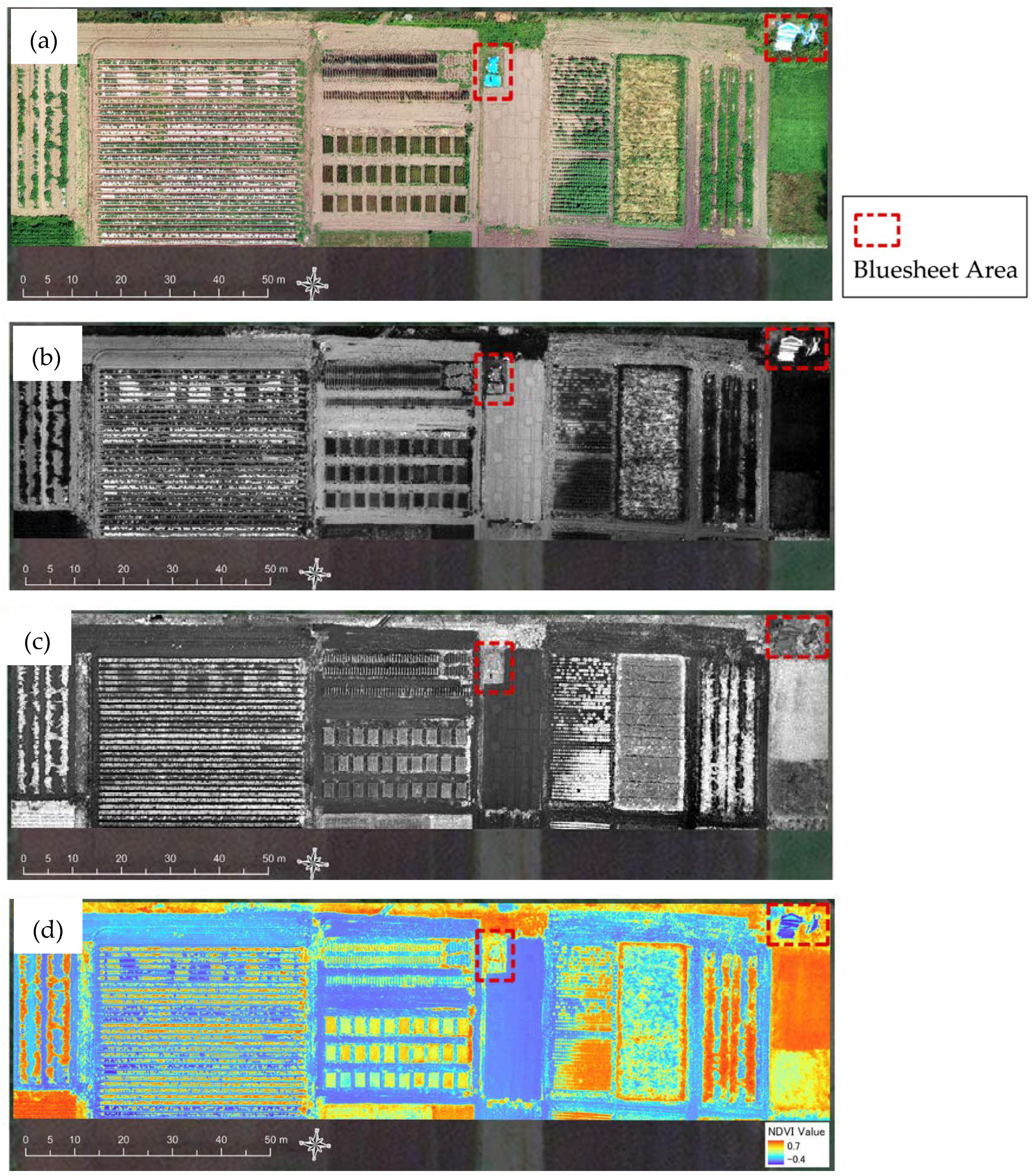
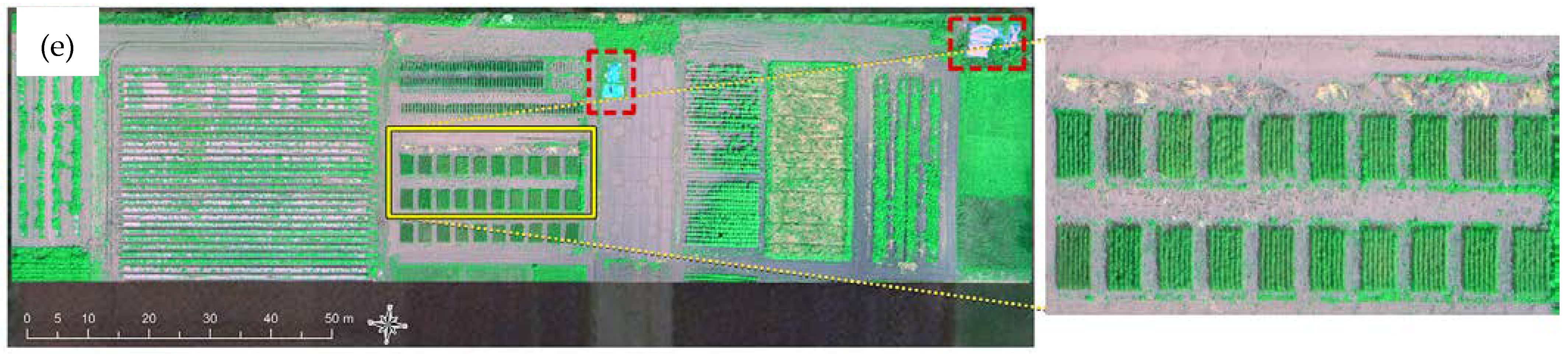
3.1. UAV Mapping Products
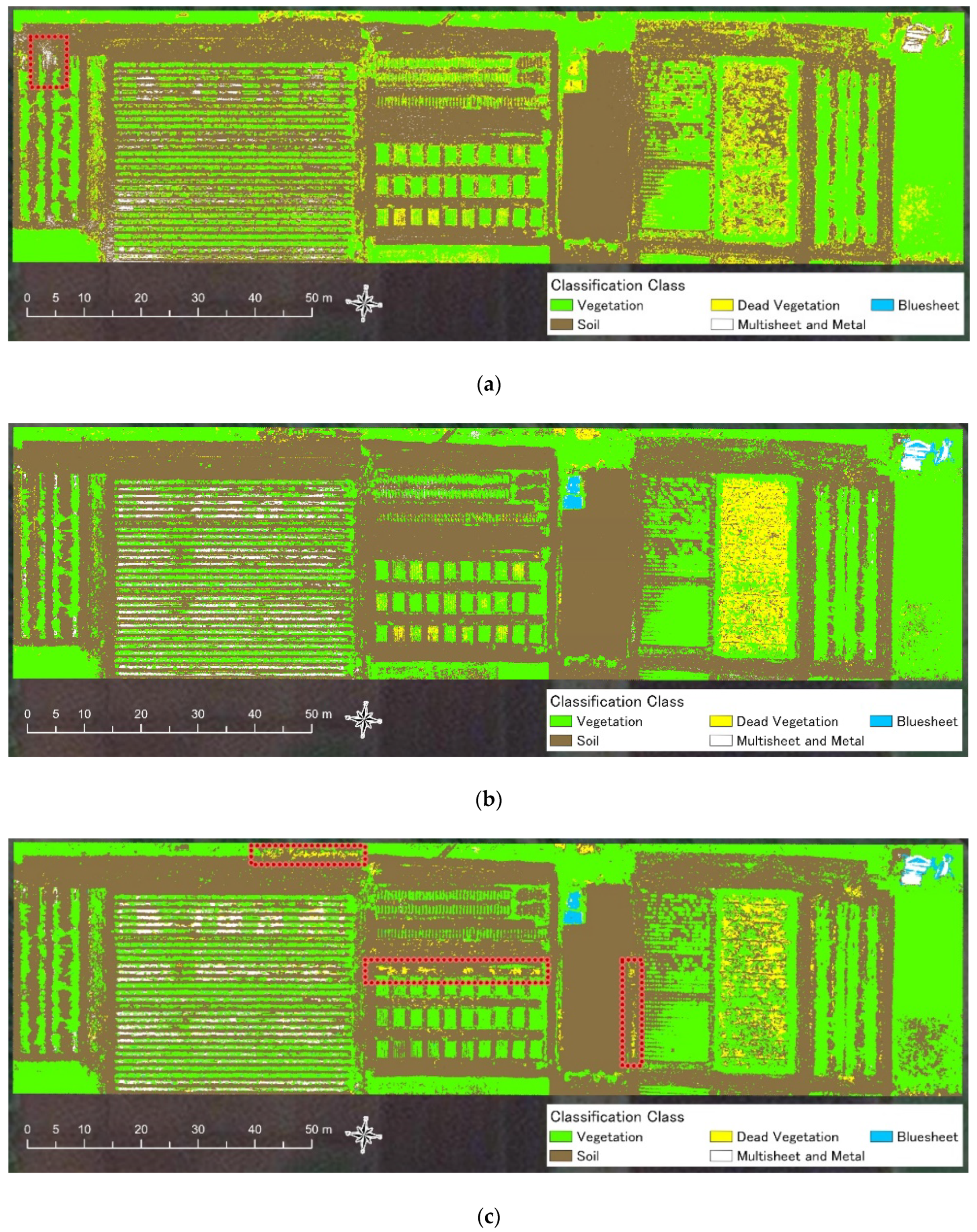
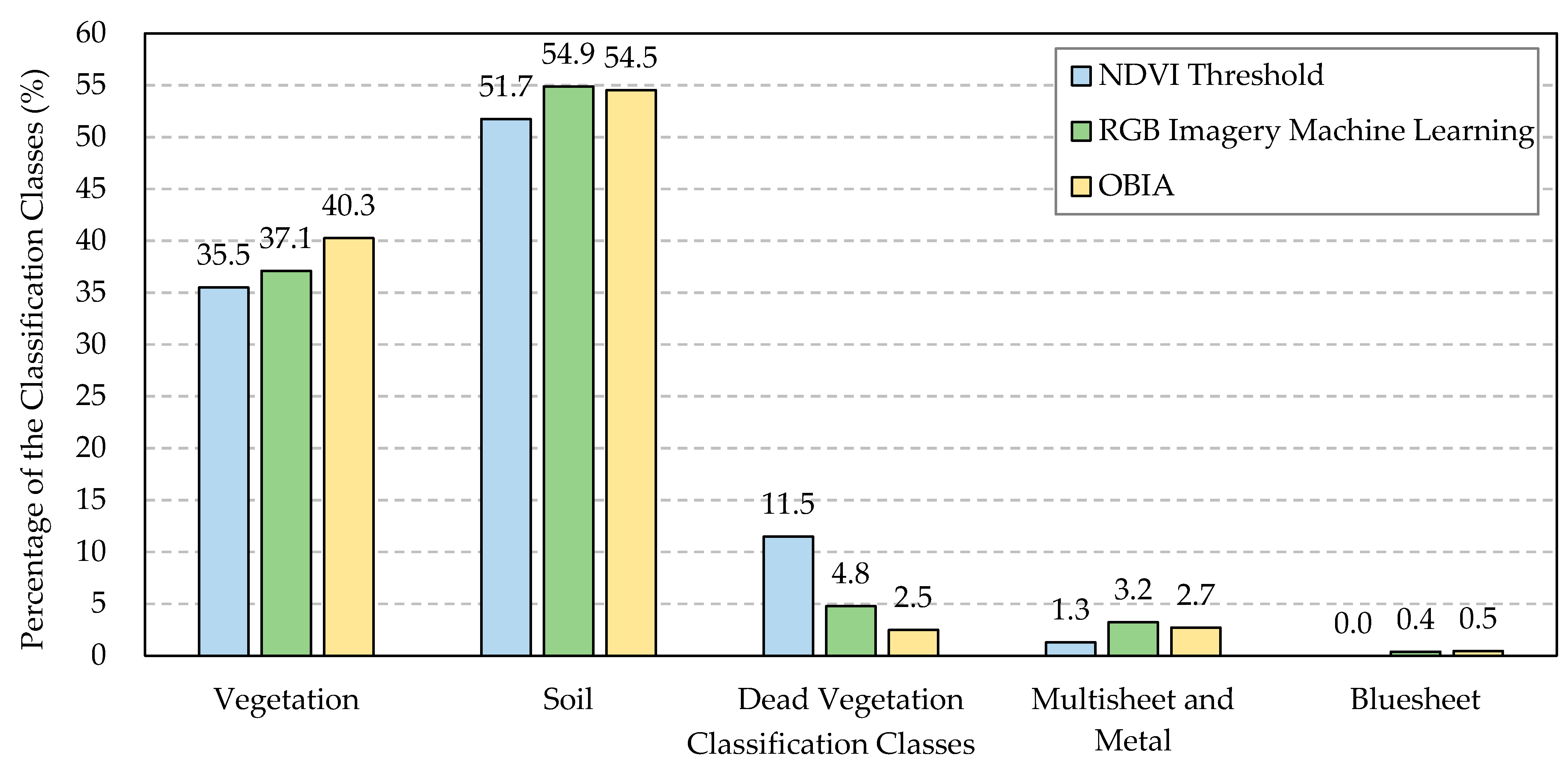
3.2. Comparison of Classification Results
3.3. Accuracy Evaluation of the Classification Methods
4. Discussion
4.1. Difference on the Performances of Mapping Products by the Three Methods
4.2. Mechanism of the Difference on the Accuracies by the Three Methods
4.3. Application Values of This Research
4.4. Limitations and Prospects
5. Conclusions
- The RGB image-based machine learning method had the best performance in classifying all types of ground objects in the study area, whereas the OBIA method had a slightly lower overall accuracy and the NDVI threshold method had the lowest accuracy among the three methods.
- The NDVI threshold method demands the least amount of input data, only requiring the NDVI raster of the field, while it was also the least time-consuming method and could provide acceptable accuracy in determining the vegetation and the metal material.
- The RGB image-based machine learning method had better performance at detecting plastic and metal materials, which had bright RGB colors.
- The OBIA method had better performance at separating objects with similar RGB characteristics but different multispectral reflectance characteristics, such as for soil and weakened vegetation.
- By verifying and comparing the performance of the existing classification methods on detecting various objects, this study unraveled the mechanism of the difference of the classification accuracies by the three methods, and made recommendations for UAV users from different fields of the optimal method, which is thought to be a contribution to transdisciplinary integration.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hunt, E.R., Jr.; Daughtry, C.S. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? Int. J. Remote Sens. 2018, 39, 5345–5376. [Google Scholar] [CrossRef] [Green Version]
- Godfrey, L.; Nahman, A.; Yonli, A.H.; Gebremedhin, F.G.; Katima, J.H.Y.; Gebremedhin, K.G.; Osman, M.A.M.; Ahmed, M.T.; Amin, M.M.; Loutfy, N.M.; et al. Africa Waste Management Outlook. 2018. Available online: https://stg-wedocs.unep.org/handle/20.500.11822/25514 (accessed on 14 February 2022).
- Vongdala, N.; Tran, H.-D.; Xuan, T.D.; Teschke, R.; Khanh, T.D. Heavy metal accumulation in water, soil, and plants of municipal solid waste landfill in Vientiane, Laos. Int. J. Environ. Res. Public Health 2018, 16, 22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wiedinmyer, C.; Yokelson, R.J.; Gullett, B.K. Global emissions of trace gases, particulate matter, and hazardous air pollutants from open burning of domestic waste. Environ. Sci. Technol. 2014, 48, 9523–9530. [Google Scholar] [CrossRef] [PubMed]
- Ferronato, N.; Torretta, V. Waste mismanagement in developing countries: A review of global issues. Int. J. Environ. Res. Public Health 2019, 16, 1060. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gutberlet, J.; Baeder, A.M. Informal recycling and occupational health in Santo André, Brazil. Int. J. Environ. Health Res. 2008, 18, 1–15. [Google Scholar] [CrossRef]
- Andrady, A.L. Microplastics in the marine environment. Mar. Pollut. Bull. 2011, 62, 1596–1605. [Google Scholar] [CrossRef]
- Scarlat, N.; Motola, V.; Dallemand, J.F.; Monforti-Ferrario, F.; Mofor, L. Evaluation of energy potential of municipal solid waste from African urban areas. Renew. Sustain. Energy Rev. 2015, 50, 1269–1286. [Google Scholar] [CrossRef]
- Wilson, D.C.; Rodic, L.; Modak, P.; Soos, R.; Rogero, A.C.; Velis, C.; Iyer, M.; Simonett, O. Global Waste Management Outlook; Wilson, D.C., Ed.; UNEP: Nairobi, Kenya, 2015; ISBN 9789280734799. [Google Scholar]
- Steduto, P.; Hsiao, T.C.; Raes, D.; Fereres, E. AquaCrop—The FAO crop model to simulate yield response to water: I. Concepts and underlying principles. Agron. J. 2009, 101, 426–437. [Google Scholar] [CrossRef] [Green Version]
- Bausch, W.C.; Neale, C.M. Crop coefficients derived from reflected canopy radiation: A concept. Trans. ASAE 1987, 30, 703–0709. [Google Scholar] [CrossRef]
- Silleos, N.G.; Alexandridis, T.K.; Gitas, I.Z.; Perakis, K. Vegetation indices: Advances made in biomass estimation and vegetation monitoring in the last 30 years. Geocarto Int. 2006, 21, 21–28. [Google Scholar] [CrossRef]
- Purevdorj, T.S.; Tateishi, R.; Ishiyama, T.; Honda, Y. Relationships between percent vegetation cover and vegetation indices. Int. J. Remote Sens. 1998, 19, 3519–3535. [Google Scholar] [CrossRef]
- Hirata, Y. Uses of high spatial resolution satellite data to forest monitoring. J. Jpn. For. Soc. 2009, 91, 136–146. [Google Scholar] [CrossRef] [Green Version]
- Corradini, F.; Bartholomeus, H.; Lwanga, E.H.; Gertsen, H.; Geissen, V. Predicting soil microplastic concentration using vis-NIR spectroscopy. Sci. Total Environ. 2019, 650, 922932. [Google Scholar] [CrossRef] [PubMed]
- Putra, I.P.W.S.; Putra, I.K.G.D.; Bayupati, I.P.A.; Sudana, O. Application of mangrove forest coverage detection in Ngurah Rai Grand Forest Park using NDVI transformation method. J. Theor. Appl. Inf. Technol. 2015, 80, 521. [Google Scholar]
- Singh, P.; Javeed, O. NDVI based assessment of land cover changes using remote sensing and GIS (A case study of Srinagar district, Kashmir). Sustain. Agric. Food Environ. Res. 2020. [Google Scholar] [CrossRef]
- Hashim, H.; Abd Latif, Z.; Adnan, N. Urban vegetation classification with NDVI threshold value method with very high resolution (VHR) Pleiades imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 237–240. [Google Scholar] [CrossRef] [Green Version]
- El-Gammal, M.I.; Ali, R.R.; Samra, R.A. NDVI threshold classification for detecting vegetation cover in Damietta governorate, Egypt. J. Am. Sci. 2014, 10, 108–113. [Google Scholar]
- Hassan, F.M.; Lim, H.S.; Jafri, M.M. CropCam UAV for land use/land cover mapping over Penang Island, Malaysia. Pertanika J. Sci. Technol. 2011, 19, 69–76. [Google Scholar]
- Hulet, A.; Roundy, B.A.; Petersen, S.L.; Jensen, R.R.; Bunting, S.C. Cover estimations using object-based image analysis rule sets developed across multiple scales in pinyon-juniper woodlands. Rangel. Ecol. Manag. 2014, 67, 318–327. [Google Scholar] [CrossRef]
- Jacquin, A.; Misakova, L.; Gay, M. A hybrid object-based classification approach for mapping urban sprawl in periurban environment. Landsc. Urban Plan. 2008, 84, 152–165. [Google Scholar] [CrossRef]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Belluscio, A.; Ardizzone, G. Mapping and classification of ecologically sensitive marine habitats using unmanned aerial vehicle (UAV) imagery and object-based image analysis (OBIA). Remote Sens. 2018, 10, 1331. [Google Scholar] [CrossRef] [Green Version]
- Hamylton, S.M.; Morris, R.H.; Carvalho, R.C.; Roder, N.; Barlow, P.; Mills, K.; Wang, L. Evaluating techniques for mapping island vegetation from unmanned aerial vehicle (UAV) images: Pixel classification, visual interpretation and machine learning approaches. Int. J. Appl. Earth Obs. Geoinf. 2020, 89, 102085. [Google Scholar] [CrossRef]
- Shin, J.I.; Seo, W.W.; Kim, T.; Park, J.; Woo, C. Using UAV multispectral images for classification of forest burn severity—A case study of the 2019 Gangneung forest fire. Forests 2019, 10, 1025. [Google Scholar] [CrossRef]
- Natesan, S.; Armenakis, C.; Benari, G.; Lee, R. Use of UAV-borne spectrometer for land cover classification. Drones 2018, 2, 16. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, O.S.; Shemrock, A.; Chabot, D.; Dillon, C.; Williams, G.; Wasson, R.; Franklin, S.E. Hierarchical land cover and vegetation classification using multispectral data acquired from an unmanned aerial vehicle. Int. J. Remote Sens. 2017, 38, 2037–2052. [Google Scholar] [CrossRef]
- Sarron, J.; Malézieux, É.; Sané, C.A.B.; Faye, É. Mango yield mapping at the orchard scale based on tree structure and land cover assessed by UAV. Remote Sens. 2018, 10, 1900. [Google Scholar] [CrossRef] [Green Version]
- Brovkina, O.; Cienciala, E.; Surový, P.; Janata, P. Unmanned aerial vehicles (UAV) for assessment of qualitative classification of Norway spruce in temperate forest stands. Geo Spat. Inf. Sci. 2018, 21, 12–20. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Hawthorne, T.L.; Torres, H.; Feinman, M. Using object-oriented classification for coastal management in the east central coast of Florida: A quantitative comparison between UAV, satellite, and aerial data. Drones 2019, 3, 60. [Google Scholar] [CrossRef] [Green Version]
- Lanthier, Y.; Bannari, A.; Haboudane, D.; Miller, J.R.; Tremblay, N. Hyperspectral data segmentation and classification in precision agriculture: A multi-scale analysis. In Proceedings of the IGARSS 2008-2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; Volume 2, pp. 585–588. [Google Scholar]
- Lebourgeois, V.; Dupuy, S.; Vintrou, É.; Ameline, M.; Butler, S.; Bégué, A. A combined random forest and OBIA classification scheme for mapping smallholder agriculture at different nomenclature levels using multisource data (simulated Sentinel-2 time series, VHRS and DEM). Remote Sens. 2017, 9, 259. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.Y.; Kong, J.L.; Jin, X.B.; Wang, X.Y.; Su, T.L.; Zuo, M. CropDeep: The crop vision dataset for deep-learning-based classification and detection in precision agriculture. Sensors 2019, 19, 1058. [Google Scholar] [CrossRef] [Green Version]
- Fleiss, J.L.; Cohen, J.; Everit, B.S. Large sample standard errors of kappa and weighted kappa. Psychol. Bull. 1969, 72, 323. [Google Scholar] [CrossRef] [Green Version]
- Sannigrahi, S.; Basu, B.; Basu, A.S.; Pilla, F. Development of automated marine floating plastic detection system using Sentinel-2 imagery and machine learning models. Mar. Pollut. Bull. 2022, 178, 113527. [Google Scholar] [CrossRef] [PubMed]
- Biermann, L.; Clewley, D.; Martinez-Vicente, V.; Topouzelis, K. Finding plastic patches in coastal waters using optical satellite data. Sci. Rep. 2020, 10, 5364. [Google Scholar] [CrossRef] [PubMed]
- Akbar, T.A.; Hassan, Q.K.; Ishaq, S.; Batool, M.; Butt, H.J.; Jabbar, H. Investigative Spatial Distribution and Modelling of Existing and Future Urban Land Changes and Its Impact on Urbanization and Economy. Remote Sens. 2019, 11, 105. [Google Scholar] [CrossRef] [Green Version]
- Yacouba, D.; Guangdao, H.; Xingping, W. Assessment of land use cover changes using NDVI and DEM in Puer and Simao counties, Yunnan Province, China. World Rural. Obs. 2009, 1, 1–11. [Google Scholar]
- Ehsan, S.; Kazem, D. Analysis of land use-land covers changes using normalized difference vegetation index (NDVI) differencing and classification methods. Afr. J. Agric. Res. 2013, 8, 4614–4622. [Google Scholar] [CrossRef] [Green Version]
- Govender, M.; Chetty, K.; Bulcock, H. A review of hyperspectral remote sensing and its application in vegetation and water resource studies. Water Sa 2007, 33, 145–151. [Google Scholar] [CrossRef] [Green Version]
- Yule, I.; Pullanagari, R. Optical sensors to assist agricultural crop and pasture management. In Smart Sensing Technology for Agriculture and Environmental Monitoring; Springer: Berlin/Heidelberg, Germany, 2012; pp. 21–32. [Google Scholar]
- Ramírez-Rincón, J.A.; Ares-Muzio, O.; Macias, J.D.; Estrella-Gutiérrez, M.A.; Lizama-Tzec, F.I.; Oskam, G.; Alvarado-Gil, J.J. On the use of photothermal techniques for the characterization of solar-selective coatings. Appl. Phys. A 2018, 124, 252. [Google Scholar] [CrossRef]
- Kelley, C.S.; Thompson, S.M.; Gilks, D.; Sizeland, J.; Lari, L.; Lazarov, V.K.; Dumas, P. Spatially resolved variations in reflectivity across iron oxide thin films. J. Magn. Magn. Mater. 2017, 441, 743–749. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RGB Imagery | Multispectral Imagery | |
|---|---|---|
| UAV model | Phantom 4 Pro (DJI) | Inspire 1 (DJI) |
| Total weight | 1375 g | 3400 g |
| Diagonal size | 350 mm | 581 mm |
| Maximum flight time | Approximately 30 min | Approximately 18 min |
| Camera type | 1 inch CMOS | Multispectral Sensor |
| Image size | 3840 × 2160 pixels | 1280 × 960 pixels |
| Angle of view | 84° | 74° |
| Top overlap rate | 80% | 80% |
| Side overlap rate | 80% | 80% |
| Camera angle | 75° from horizon | 90° degrees from horizon |
| Flight height | 50 m | 40 m |
| Ground resolution | 1.6 cm/pixel | 6.2 cm/pixel |
| Class | Multi-Sheet and Metal | Soil | Weakened Vegetation | Vegetation |
| NDVI threshold | −0.3 to −0.2 | −0.2 to 0.0 | 0.0 to 0.2 | 0.2 to 1.0 |
| (a) Confusion matrix for the normalized difference vegetation index (NDVI) threshold method | ||||||||
| Class Name | Vegetation | Soil | Weakened Vegetation | Multi- Sheet | Blue- Sheet | Total | User_ Accuracy | Kappa |
| Vegetation | 279 | 33 | 6 | 5 | 5 | 328 | 0.851 | |
| Soil | 6 | 426 | 58 | 18 | 6 | 514 | 0.829 | |
| Weakened vegetation | 32 | 59 | 29 | 2 | 23 | 145 | 0.200 | |
| Multisheet and Metal | 0 | 6 | 1 | 6 | 0 | 13 | 0.462 | |
| Bluesheet | 0 | 0 | 0 | 0 | 0 | 0 | 0.000 | |
| Total | 317 | 524 | 94 | 31 | 34 | 1000 | 0.000 | |
| Producer_accuracy | 0.880 | 0.813 | 0.309 | 0.194 | 0.000 | 0.000 | 0.740 | |
| Kappa | 0.576 | |||||||
| (b) Confusion matrix for the red-green-blue (RGB) mage-based machine learning method | ||||||||
| Class Name | Vegetation | Soil | Weakened Vegetation | Multi- Sheet | Blue- Sheet | Total | User_ Accuracy | Kappa |
| Vegetation | 300 | 27 | 5 | 0 | 0 | 332 | 0.904 | |
| Soil | 11 | 486 | 50 | 7 | 0 | 554 | 0.877 | |
| Weakened vegetation | 4 | 10 | 36 | 0 | 0 | 50 | 0.720 | |
| Multisheet and Metal | 1 | 1 | 3 | 24 | 1 | 30 | 0.800 | |
| Bluesheet | 1 | 0 | 0 | 0 | 33 | 34 | 0.971 | |
| Total | 317 | 524 | 94 | 31 | 34 | 1000 | 0.000 | |
| Producer_accuracy | 0.946 | 0.927 | 0.383 | 0.774 | 0.971 | 0.000 | 0.879 | |
| Kappa | 0.798 | |||||||
| (c) Confusion matrix for the object-based image analysis (OBIA) method | ||||||||
| Class Name | Vegetation | Soil | Weakened Vegetation | Multi- Sheet | Blue- Sheet | Total | User_ Accuracy | Kappa |
| Vegetation | 311 | 43 | 21 | 6 | 0 | 381 | 0.816 | |
| Soil | 3 | 468 | 31 | 3 | 0 | 505 | 0.927 | |
| Weakened vegetation | 0 | 6 | 41 | 0 | 0 | 47 | 0.872 | |
| Multisheet and Metal | 2 | 5 | 1 | 21 | 1 | 30 | 0.700 | |
| Bluesheet | 1 | 2 | 0 | 1 | 33 | 37 | 0.892 | |
| Total | 317 | 524 | 94 | 31 | 34 | 1000 | 0.000 | |
| Producer_accuracy | 0.981 | 0.893 | 0.436 | 0.677 | 0.971 | 0.000 | 0.874 | |
| Kappa | 0.793 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Maskey, S.; Okazawa, H.; Hayashi, K.; Hayashi, T.; Sekiyama, A.; Shimada, S.; Fiwa, L. Assessment of Three Automated Identification Methods for Ground Object Based on UAV Imagery. Sustainability 2022, 14, 14603. https://doi.org/10.3390/su142114603
Zhang K, Maskey S, Okazawa H, Hayashi K, Hayashi T, Sekiyama A, Shimada S, Fiwa L. Assessment of Three Automated Identification Methods for Ground Object Based on UAV Imagery. Sustainability. 2022; 14(21):14603. https://doi.org/10.3390/su142114603
Chicago/Turabian StyleZhang, Ke, Sarvesh Maskey, Hiromu Okazawa, Kiichiro Hayashi, Tamano Hayashi, Ayako Sekiyama, Sawahiko Shimada, and Lameck Fiwa. 2022. "Assessment of Three Automated Identification Methods for Ground Object Based on UAV Imagery" Sustainability 14, no. 21: 14603. https://doi.org/10.3390/su142114603
APA StyleZhang, K., Maskey, S., Okazawa, H., Hayashi, K., Hayashi, T., Sekiyama, A., Shimada, S., & Fiwa, L. (2022). Assessment of Three Automated Identification Methods for Ground Object Based on UAV Imagery. Sustainability, 14(21), 14603. https://doi.org/10.3390/su142114603