
Prediction of Pork Supply Based on Improved Mayfly Optimization Algorithm and BP Neural Network


Abstract
:1. Introduction
- (1)
- An improved speed updating formula is proposed to overcome the disadvantage that the speed of a mayfly in the mayfly optimization algorithm cannot be updated due to the large distance between individuals;
- (2)
- An adaptive visibility coefficient is introduced to balance the global search ability and local search ability of the algorithm;
- (3)
- An improved mating operator is proposed to increase the probability of producing more potential offspring mayflies;
- (4)
- AVC-IMOA is used to optimize the initial weights and thresholds of the BPNN, which improves the fitting accuracy of the network;
- (5)
- AVC-IMOA_BP is used to forecast the pork supply in Heilongjiang Province, China, laying a foundation for studying the fluctuation law of the pork price and the balance of pork supply and demand.
2. Material and Methods
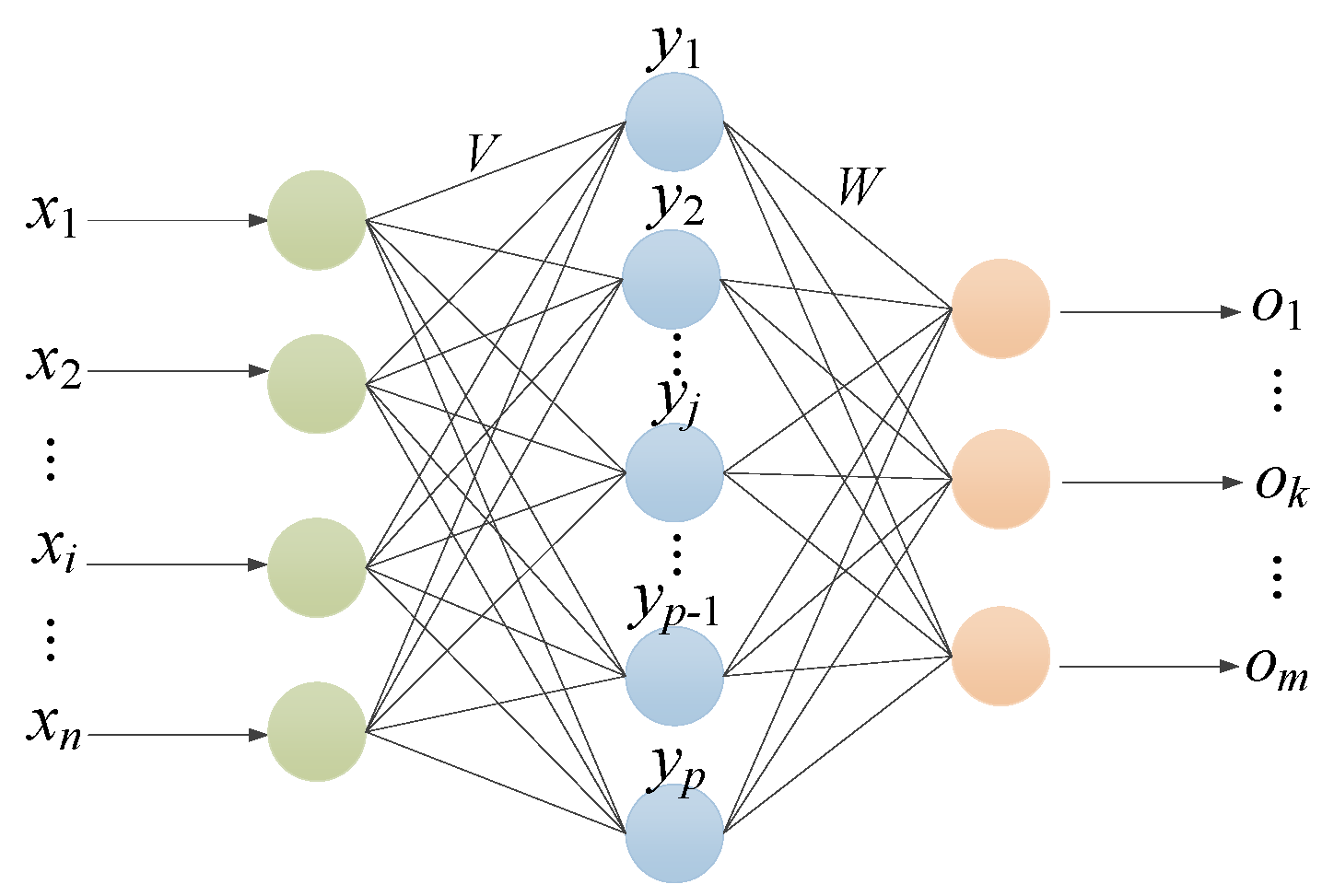
2.1. BPANN
2.2. MOA
2.2.1. Position and Velocity Updates of Male Mayflies
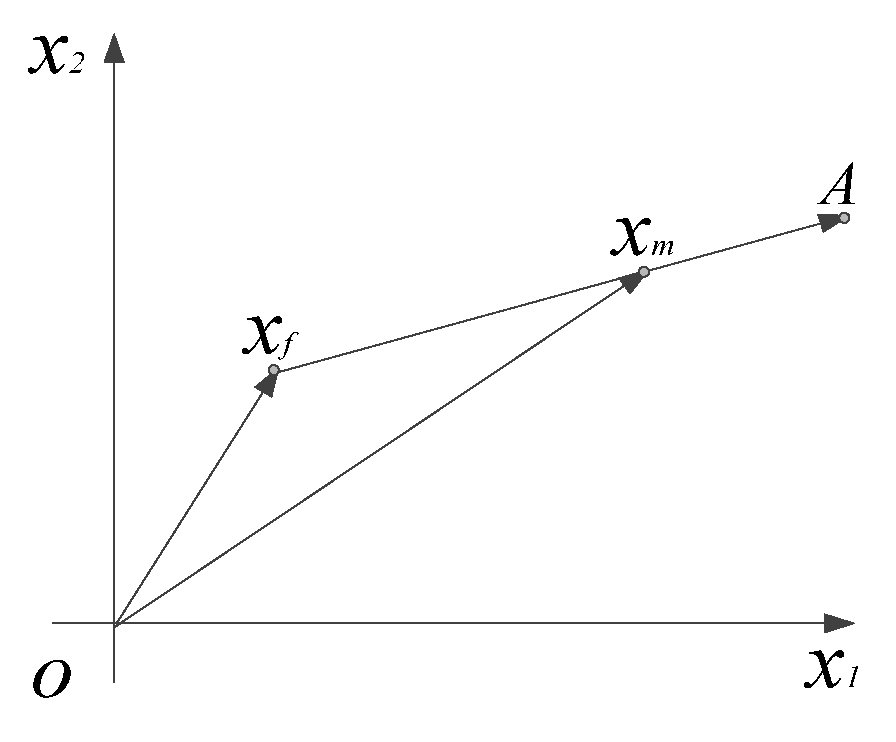
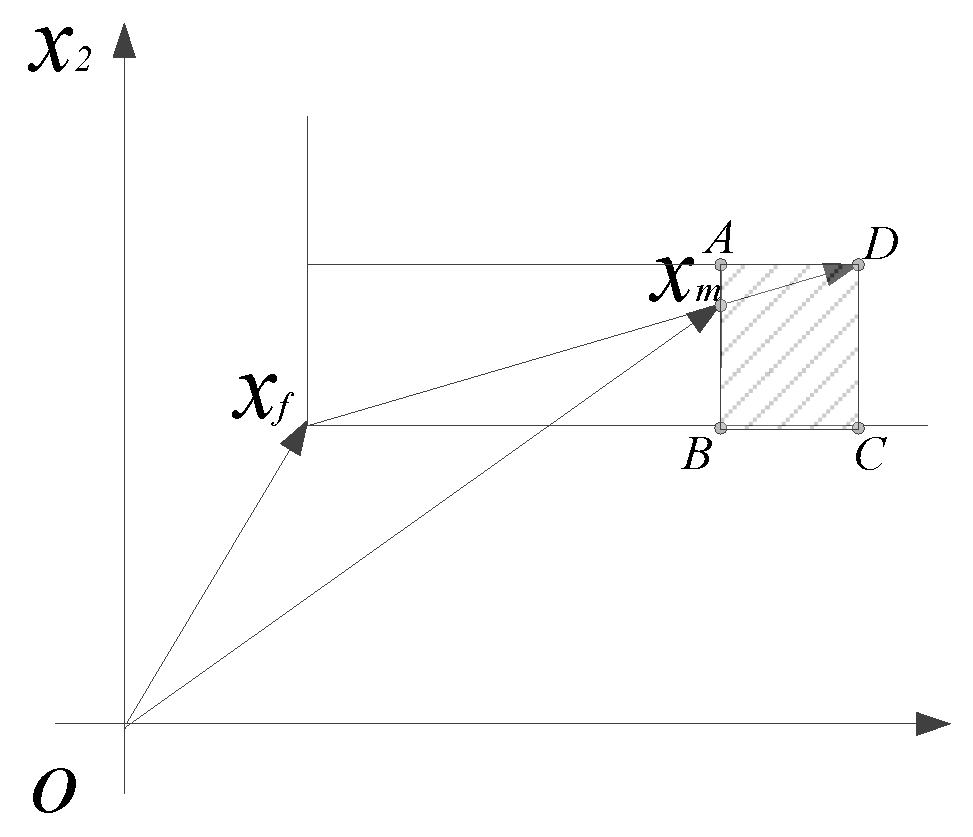
2.2.2. Position and Velocity Updates of Female Mayflies
2.2.3. Mating of Mayflies
3. Improved Mayfly Optimization Algorithm with Adaptive Visibility Coefficient
3.1. Improved Velocity Update Formula
- (a)
- Improved velocity update formula of male mayflies:where a1 is the individual cognitive coefficient, and a2 is the social contribution coefficient; usually, a1 = 1, while a2 = 1.5. rp is the Euclidean distance between the i-th mayfly and pbest, while rg is the Euclidean distance between the i-th mayfly and gbest. The best male mayfly in the population still updates its velocity according to Equation (14).
- (b)
- Improved velocity update formula of female mayflies:where rm is the Euclidean distance between female mayflies and their spouses, and fl is the random walk coefficient; usually, fl = 0.1, and r is a D-dimensional random vector evenly distributed between [−1,1].
3.2. Adaptive Visibility Coefficient
3.3. Improved Mayflies Mating Operator
3.4. Time Complexity Analysis
3.5. Flow Chart of AVC-IMOA
3.6. Pseudocode of AVC-IMOA
| Algorithm 1: Improved mayfly optimization algorithm with adaptive visibility coefficient (AVC-IMOA) |
| Begin |
| Randomly generate an initial population with size n and calculate the fitness values of all individuals. |
| The global optimal position gbest of all mayflies and the optimal position pbest of male mayflies were recorded. Runtime = 0 |
| Whileruntime ≤ Maxtime do |
| Update the position and velocity of male mayflies according to Equations (12), (14), (19) and (21). |
| Update the position and velocity of female mayflies according to Equations (15), (20) and (21). |
| Male and female mayflies mate according to Equations (22) and (23) to produce offspring. |
| Process the individuals beyond the search scope. |
| Recalculate the fitness values of all mayflies and retain n better individuals. |
| Update gbest and pbest. |
| End while |
| Output the optimal solution and the optimal value. |
| End |
4. Numerical Experiments and Analysis
4.1. Algorithm Performance Evaluation Indicator
- Mean
- 2.
- Std
- 3.
- w/t/l
- 4.
- Friedman rank ranking
- (1)
- Each algorithm runs R times independently on each test function and retains the optimal value for each run.
- (2)
- According to Equation (24), the average value of the optimal value obtained from R runs is calculated.where m is the number of algorithms involved in the comparison, k is the number of test functions, R is the number of independent runs, and meanfij is the average value of the optimal value obtained by the i-th algorithm independently running R times on the j-th test function.
- (3)
- For each test function, m algorithms are sorted in accordance with the meanfij from small to large and given the rankij(i = 1, 2,…, m; j = 1, 2,…, k) of each algorithm. Sometimes there will be cases where the algorithms involved in the comparison obtain the same meanfij; in this case, the average value of the ranking position is taken as the rank ranking.
- (4)
- According to Equation (27), the Averanki of each algorithm is calculated.
- (5)
- After sorting by the Averanki of each algorithm from small to large, the sorting result is the final ranking of the various algorithms.
4.2. Parameter Setting
4.3. Test Results and Analysis
4.3.1. Test Results
4.3.2. Result Analysis
- (1)
- Result analysis of test function
- (2)
- Convergence curve analysis
4.4. AVC-IMOA to Optimize BPANN
5. Prediction of Pork Supply
5.1. Sample Data
5.2. Prediction of Pork Supply
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shen, Z.; Zhang, Y.; Lu, J.; Xu, J.; Xiao, G. A novel time series forecasting model with deep learning. Neurocomputing 2019, 396, 302–313. [Google Scholar] [CrossRef]
- Kadiyala, A.; Kumar, A. Vector-time-series-based back propagation neural network modeling of air quality inside a public transportation bus using available software. Environ. Prog. Sustain. Energy 2015, 35, 7–13. [Google Scholar] [CrossRef]
- Che, Z.-G.; Chiang, T.-A.; Che, Z. Feed-forward neural networks training: A comparison between genetic algorithm and back-propagation learning algorithm. Int. J. Innov. Comput. Inf. Control 2011, 7, 5839–5850. [Google Scholar]
- Jie, Z.; Qiurui, M. Establishing a Genetic Algorithm-Back Propagation model to predict the pressure of girdles and to determine the model function. Text. Res. J. 2020, 90, 2564–2578. [Google Scholar] [CrossRef]
- Cheng, P.; Chen, D.; Wang, J. Clustering of the body shape of the adult male by using principal component analysis and genetic algorithm–BP neural network. Soft Comput. 2020, 24, 13219–13237. [Google Scholar] [CrossRef]
- Guo, K.; Cheng, X.; Shi, J. Accuracy Improvement of Short-Term Photovoltaic Power Forecasting Based on PCA and PSO-BP. In Proceedings of the 2021 3rd Asia Energy and Electrical Engineering Symposium (AEEES), Chendu, China, 26–29 March 2021; pp. 893–897. [Google Scholar]
- Zhuo, W.; Jia, L.-M.; Yong, Q.; Wang, Y.-H. Railway passenger traffic volume prediction based on neural network. Appl. Artif. Intell. 2007, 21, 1–10. [Google Scholar] [CrossRef]
- Han, W.; Nan, L.; Su, M.; Chen, Y.; Li, R.; Zhang, X. Research on the Prediction Method of Centrifugal Pump Performance Based on a Double Hidden Layer BP Neural Network. Energies 2019, 12, 2709. [Google Scholar] [CrossRef] [Green Version]
- Cheng, P.; Chen, D.; Wang, J. Research on underwear pressure prediction based on improved GA-BP algorithm. Int. J. Cloth. Sci. Technol. 2021, 33, 619–642. [Google Scholar] [CrossRef]
- Meng, C.; Wu, D.; Lei, Y. Neural Network Satellite Clock Bias Prediction Based on the Whale Optimization Algorithm. In Advances in Natural Computation, Fuzzy Systems and Knowledge Discovery. Proceedings of the 2021 17th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD 2021), Guiyang, China, 24–26 July 2021; Xie, Q., Zhao, L., Li, K., Yadav, A., Wang, L., Eds.; Springer International Publishing: Cham, Switzerland, 2022; Volume 89, pp. 1152–1160. [Google Scholar]
- Song, L.; Liu, W.; Bo, L. Prediction of Short-Term Traffic Flow Based on PSO-Optimized Chaotic BP Neural Network. In Proceedings of the 2013 International Conference on Computer Sciences and Applications, Wuhan, China, 14–15 December 2013; pp. 292–295. [Google Scholar]
- Zhao, G.; Liu, D.; Wang, J.J. Cloud security situation prediction method based on grey wolf optimization and BP neural network. J. China Univ. Posts Telecommun. 2020, 27, 30–41. [Google Scholar]
- Zervoudakis, K.; Tsafarakis, S. A mayfly optimization algorithm. Comput. Ind. Eng. 2020, 145, 106559. [Google Scholar] [CrossRef]
- Elaziz, M.A.; Senthilraja, S.; Zayed, M.E.; Elsheikh, A.H.; Mostafa, R.R.; Lu, S. A new random vector functional link integrated with mayfly optimization algorithm for performance prediction of solar photovoltaic thermal collector combined with electrolytic hydrogen production system. Appl. Therm. Eng. 2021, 193, 117055. [Google Scholar] [CrossRef]
- Shaheen, M.A.M.; Hasanien, H.M.; El Moursi, M.S.; El-Fergany, A.A. Precise modeling of PEM fuel cell using improved chaotic MayFly optimization algorithm. Int. J. Energy Res. 2021, 45, 18754–18769. [Google Scholar] [CrossRef]
- Liu, Y.; Chai, Y.; Liu, B.; Wang, Y. Bearing Fault Diagnosis Based on Energy Spectrum Statistics and Modified Mayfly Optimization Algorithm. Sensors 2021, 21, 2245. [Google Scholar] [CrossRef] [PubMed]
- Farki, A.; Salekshahrezaee, Z.; Tofigh, A.M.; Ghanavati, R.; Arandian, B.; Chapnevis, A.J. COVID-19 Diagnosis Using Capsule Network and Fuzzy C-Means and Mayfly Optimization Algorithm. BioMed Res. Int. 2021, 2021, 2295920. [Google Scholar] [CrossRef]
- Gao, Z.-M.; Zhao, J.; Li, S.-R.; Hu, Y.-R. The improved mayfly optimization algorithm. J. Phys. Conf. Ser. 2020, 1684, 012077. [Google Scholar] [CrossRef]
- Gao, Z.-M.; Zhao, J.; Li, S.-R.; Hu, Y.-R. The improved mayfly optimization algorithm with opposition based learning rules. J. Phys. Conf. Ser. 2020, 1693, 012117. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, Z.-M. The improved mayfly optimization algorithm with Chebyshev map. J. Phys. Conf. Ser. 2020, 1684, 012075. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, Z.-M. The negative mayfly optimization algorithm. J. Phys. Conf. Ser. 2020, 1693, 012098. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, J.; Xie, X.; Lin, Z.; Li, H. Mayfly sparrow search hybrid algorithm for RFID Network Planning. IEEE Sens. J. 2022, 22, 16673–16686. [Google Scholar] [CrossRef]
- Zhou, D.; Kang, Z.; Su, X.; Yang, C. An enhanced Mayfly optimization algorithm based on orthogonal learning and chaotic exploitation strategy. Int. J. Mach. Learn. Cybern. 2022, 13, 3625–3643. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, F.; Sun, T.; Xu, B. A constrained optimization method based on BP neural network. Neural Comput. Appl. 2016, 29, 413–421. [Google Scholar] [CrossRef]
- Wu, G.; Mallipeddi, R.; Suganthan, P.N. Problem Definitions and Evaluation Criteria for the CEC 2017 Competition and Special Session on Constrained Single Objective Real-Parameter Optimization; Technical Report for National University of Defense Technology: Changsha, China; Kyungpook National University: Daegu, Republic of Korea; Nanyang Technological University: Singapore, 2017. [Google Scholar]
- Cheng, Z.; Song, H.; Wang, J.; Zhang, H.; Chang, T.; Zhang, M. Hybrid firefly algorithm with grouping attraction for constrained optimization problem. Knowledge-Based Syst. 2021, 220, 106937. [Google Scholar] [CrossRef]
- Zhou, M.; Zhao, Z.; Xiong, C.; Kang, Q. An opposition-based particle swarm optimization algorithm for noisy environments. In Proceedings of the 2018 IEEE 15th International Conference on Networking, Sensing and Control (ICNSC), Zhuhai, China, 27–29 March 2018; pp. 1–6. [Google Scholar]
- Song, H.; Wang, J.; Song, L.; Zhang, H.; Bei, J.; Ni, J.; Ye, B. Improvement and application of hybrid real-coded genetic algorithm. Appl. Intell. 2022, 52, 17410–17448. [Google Scholar] [CrossRef]
- Wang, C.; Li, M.; Wang, R.; Yu, H.; Wang, S. An image denoising method based on BP neural network optimized by improved whale optimization algorithm. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 141. [Google Scholar] [CrossRef]
- Karaboga, D.; Akay, B. A comparative study of Artificial Bee Colony algorithm. Appl. Math. Comput. 2009, 214, 108–132. [Google Scholar] [CrossRef]
- Shi, L.; Ding, X.; Li, M.; Liu, Y. Research on the Capability Maturity Evaluation of Intelligent Manufacturing Based on Firefly Algorithm, Sparrow Search Algorithm, and BP Neural Network. Complexity 2021, 2021, 5554215. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Names of Various Operators | ① | ② | ③ | ④ | AVC-IMOA |
|---|---|---|---|---|---|
| Time complexity | O(n) | O(n/2) | O(n/2) | O(n/2) | O(n) + O(n/2) + O(n/2) + O(n/2) = O(n) |
| Algorithm | Year | Parameters |
|---|---|---|
| MOA | 2020 | α1 = 1, α2 = 1.5, β = 2, d = 0.1, fl = 0.1 |
| VGMOA | 2020 | α1 = 1, α2 = 1.5, β = 2, d = 0.1, fl = 0.1, gmax = 0.9, gmin = 0.5 |
| IMOA | 2020 | α1 = 1, α2 = 1.5, β = 2, d = 0.1, fl = 0.1 |
| OBL_MO | 2020 | α1 = 1, α2 = 1.5, β = 2, d = 0.1, fl = 0.1 |
| OBLPSOGD | 2018 | wmin = 0.4, wmax = 0.9, P0 = 0.3, α = 3.2, k = 15, σ =0.3 |
| SSA | 2020 | PD = 0.2NP, SD = 0.1NP, ST = 0.8 |
| AVC-IMOA | 2022 | α1 = 1, α2 = 1.5, d = 0.1. fl = 0.1 |
| Problem | Statistical Indicators | Algorithm | ||||||
|---|---|---|---|---|---|---|---|---|
| MOA | VGMOA | IMOA | OBL_MO | SSA | OBLPSOGD | AVC-IMOA | ||
| C01 | Mean | 1.36 × 10-2 | 8.05 × 10-3 | 1.69 × 10-1 | 2.89 × 10-2 | 1.44 × 105 | 7.88 × 102 | 2.22 × 10-13 |
| Std | 5.09 × 10-3 | 3.21 × 10-3 | 4.16 × 10-2 | 1.55 × 10-2 | 4.01 × 104 | 3.37 × 102 | 7.81 × 10-13 | |
| C02 | Mean | 2.53 × 10-2 | 1.16 × 10-2 | 2.12 × 10-1 | 2.80 × 10-2 | 5.32 × 104 | 1.61 × 103 | 3.99 × 10-10 |
| Std | 8.39 × 10-3 | 4.15 × 10-3 | 3.28 × 10-2 | 1.18 × 10-2 | 1.51 × 104 | 7.26 × 102 | 1.54 × 10-9 | |
| C03 | Mean | 2.94 × 105 | 1.02 × 106 | 3.81 × 106 | 1.80 × 106 | 9.21 × 107 | 6.45 × 104 | 6.53 × 105 |
| Std | 6.49 × 105 | 1.48 × 106 | 3.20 × 106 | 3.13 × 106 | 3.32 × 107 | 2.94 × 104 | 1.07 × 106 | |
| C04 | Mean | 8.79 × 102 | 9.16 × 102 | 9.01 × 102 | 8.81 × 102 | 6.17 × 102 | 5.67 × 102 | 6.57 × 102 |
| Std | 6.95 × 101 | 4.15 × 101 | 5.67 × 101 | 6.55 × 101 | 2.71 × 101 | 6.27 × 101 | 1.92 × 101 | |
| C05 | Mean | 3.75 × 101 | 4.18 × 101 | 5.75 × 101 | 3.87 × 101 | 6.74 × 105 | 4.98 × 102 | 1.97 × 101 |
| Std | 2.68 × 101 | 2.75 × 101 | 6.17 × 101 | 2.67 × 101 | 6.76 × 104 | 3.43 × 102 | 6.43 × 100 | |
| C06 | Mean | 1.00 × 108 | 5.30 × 107 | 6.32 × 108 | 6.70 × 107 | 1.19 × 1010 | 1.25 × 109 | 2.98 × 107 |
| Std | 1.43 × 108 | 1.07 × 108 | 1.51 × 108 | 1.44 × 108 | 4.76 × 109 | 4.43 × 109 | 1.03 × 108 | |
| C07 | Mean | 8.46 × 102 | 1.25 × 104 | 1.09 × 1012 | 3.74 × 102 | 7.67 × 1013 | −7.28 × 101 | −3.06 × 102 |
| Std | 5.25 × 103 | 6.33 × 104 | 1.70 × 1011 | 2.20 × 103 | 1.64 × 1013 | 1.41 × 102 | 1.47 × 102 | |
| C08 | Mean | 1.61 × 103 | 1.86 × 103 | 1.04 × 106 | 9.89 × 103 | 1.63 × 1017 | 1.17 × 1013 | 7.19 × 10-4 |
| Std | 9.05 × 102 | 1.41 × 103 | 4.62 × 105 | 6.80 × 103 | 5.98 × 1016 | 8.10 × 1012 | 3.31 × 104 | |
| C09 | Mean | 7.25 × 100 | 6.22 × 100 | 4.02 × 106 | 6.79 × 100 | 8.31 × 1013 | 8.91 × 1011 | 2.18 × 100 |
| Std | 2.40 × 100 | 1.88 × 100 | 1.24 × 107 | 2.31 × 100 | 4.30 × 1013 | 2.2 × 1012 | 2.97 × 100 | |
| C10 | Mean | 3.71 × 101 | 3.16 × 101 | 1.19 × 106 | 2.18 × 102 | 3.12 × 1018 | 2.23 × 1013 | 2.76 × 10-4 |
| Std | 5.08 × 101 | 2.97 × 101 | 5.67 × 105 | 2.48 × 102 | 9.28 × 1017 | 2.07 × 1013 | 8.29 × 105 | |
| C11 | Mean | 2.65 × 1012 | 4.61 × 1011 | 4.86 × 1013 | 3.93 × 1012 | 2.14 × 1017 | 8.92 × 1016 | 5.87 × 1010 |
| Std | 4.40 × 1012 | 7.24 × 1011 | 6.45 × 1013 | 5.20 × 1012 | 8.61 × 1016 | 9.96 × 1016 | 1.01 × 1011 | |
| C12 | Mean | 9.68 × 101 | 8.05 × 101 | 1.29 × 102 | 1.09 × 102 | 2.59 × 1017 | 1.40 × 1012 | 1.31 × 101 |
| Std | 3.36 × 101 | 2.83 × 101 | 2.85 × 101 | 3.88 × 101 | 4.99 × 1016 | 1.80 × 1012 | 9.76 × 100 | |
| C13 | Mean | 6.90 × 1014 | 1.78 × 1015 | 7.53 × 1015 | 1.80 × 1015 | 2.86 × 1017 | 1.57 × 1013 | 5.91 × 1014 |
| Std | 3.77 × 1014 | 8.85 × 1014 | 2.66 × 1015 | 7.15 × 1014 | 3.93 × 1016 | 1.22 × 1013 | 2.45 × 1014 | |
| C14 | Mean | 1.94 × 100 | 1.97 × 100 | 2.06 × 100 | 1.97 × 100 | 5.25 × 1017 | 2.77 × 1012 | 1.41 × 100 |
| Std | 7.63 × 10-2 | 7.50 × 10-2 | 8.48 × 10-2 | 9.82 × 10-2 | 5.42 × 1016 | 5.22 × 1012 | 2.02 × 102 | |
| C15 | Mean | 2.31 × 101 | 2.45 × 101 | 2.37 × 101 | 2.27 × 101 | 2.32 × 1017 | 1.49 × 101 | 2.57 × 101 |
| Std | 2.57 × 100 | 3.07 × 100 | 3.76 × 100 | 3.86 × 100 | 3.75 × 1016 | 1.60 × 100 | 5.37 × 100 | |
| C16 | Mean | 2.41 × 102 | 2.39 × 102 | 2.42 × 102 | 2.37 × 102 | 2.42 × 1017 | 1.34 × 102 | 1.32 × 102 |
| Std | 1.01 × 101 | 9.88 × 100 | 1.27 × 101 | 1.15 × 101 | 3.50 × 1016 | 7.55 × 100 | 1.46 × 1016 | |
| C17 | Mean | 9.61 × 1010 | 9.61 × 1010 | 9.61 × 1010 | 9.61 × 1010 | 2.86 × 1017 | 1.44 × 1012 | 9.61 × 1010 |
| Std | 7.62 × 10-3 | 3.93 × 10-3 | 9.95 × 10-3 | 5.34 × 10-3 | 3.44 × 1016 | 2.82 × 1012 | 4.44 × 102 | |
| C18 | Mean | 9.95 × 1014 | 4.78 × 1014 | 1.38 × 1015 | 6.52 × 1014 | 2.13 × 1028 | 3.80 × 1019 | 5.97 × 1010 |
| Std | 1.65 × 1015 | 8.14 × 1014 | 2.57 × 1015 | 9.78 × 1014 | 4.43 × 1027 | 4.38 × 1019 | 1.68 × 1011 | |
| C19 | Mean | 1.85 × 1017 | 1.85 × 1017 | 1.85 × 1017 | 1.85 × 1017 | 1.85 × 1017 | 1.84 × 1017 | 1.83 × 1017 |
| Std | 9.16 × 1013 | 7.14 × 1013 | 8.55 × 1013 | 7.91 × 1013 | 4.15 × 1013 | 1.84 × 1014 | 4.87 × 105 | |
| C20 | Mean | 2.89 × 100 | 3.10 × 100 | 7.61 × 100 | 2.76 × 100 | 8.27 × 100 | 8.26 × 100 | 2.50 × 100 |
| Std | 5.11 × 10-1 | 6.82 × 10-1 | 2.79 × 10-1 | 4.44 × 10-1 | 3.51 × 10-1 | 4.10 × 10-1 | 4.49 × 10-1 | |
| C21 | Mean | 1.21 × 102 | 8.53 × 101 | 1.39 × 102 | 1.05 × 102 | 1.10 × 1017 | 6.58 × 1012 | 1.10 × 101 |
| Std | 4.03 × 101 | 3.55 × 101 | 2.05 × 101 | 3.26 × 101 | 2.11 × 1016 | 6.22 × 1012 | 1.03 × 101 | |
| C22 | Mean | 7.30 × 1014 | 1.77 × 1015 | 5.77 × 1015 | 1.89 × 1015 | 1.17 × 1017 | 4.64 × 1013 | 8.46 × 1014 |
| Std | 4.40 × 1014 | 9.42 × 1014 | 2.04 × 1015 | 9.23 × 1014 | 1.72 × 1016 | 3.74 × 1013 | 5.17 × 1014 | |
| C23 | Mean | 1.97 × 100 | 1.99 × 100 | 2.04 × 100 | 1.97 × 100 | 2.00 × 1017 | 1.92 × 1013 | 1.43 × 100 |
| Std | 6.09 × 10-2 | 8.28 × 10-2 | 9.63 × 10-2 | 7.98 × 10-2 | 3.46 × 1016 | 2.80 × 1013 | 3.23 × 10-2 | |
| C24 | Mean | 2.32 × 101 | 2.17 × 101 | 2.37 × 101 | 2.36 × 101 | 9.18 × 1016 | 1.59 × 101 | 2.35 × 101 |
| Std | 4.43 × 100 | 2.51 × 100 | 2.99 × 100 | 4.08 × 100 | 1.17 × 1016 | 1.45 × 100 | 3.80 × 100 | |
| C25 | Mean | 2.42 × 102 | 2.38 × 102 | 2.43 × 102 | 2.40 × 102 | 8.46 × 1016 | 1.39 × 102 | 2.42 × 102 |
| Std | 1.09 × 101 | 9.58 × 100 | 9.05 × 100 | 1.14 × 101 | 1.72 × 1016 | 1.01 × 101 | 1.30 × 101 | |
| C26 | Mean | 9.61 × 1010 | 9.61 × 1010 | 9.61 × 1010 | 9.61 × 1010 | 1.17 × 1017 | 5.00 × 1012 | 9.61 × 1010 |
| Std | 3.42 × 10-3 | 3.14 × 10-3 | 3.05 × 10-3 | 6.69 × 10-3 | 1.71 × 1016 | 7.47 × 1012 | 4.74 × 10-2 | |
| C27 | Mean | 2.01 × 1013 | 7.94 × 1013 | 6.84 × 1014 | 2.35 × 1014 | 5.86 × 1027 | 3.99 × 1019 | 8.14 × 1012 |
| Std | 2.33 × 1013 | 2.74 × 1014 | 1.05 × 1015 | 7.13 × 1014 | 1.07 × 1027 | 5.09 × 1019 | 1.77 × 1013 | |
| C28 | Mean | 1.85 × 1017 | 1.85 × 1017 | 1.85 × 1017 | 1.85 × 1017 | 1.85 × 1017 | 1.84 × 1017 | 1.85 × 1017 |
| Std | 1.10 × 1014 | 1.12 × 1014 | 9.35 × 1013 | 8.29 × 1013 | 7.60 × 1013 | 2.42 × 1014 | 1.42 × 1014 | |
| Mean: w/t/l | 26/2/0 | 25/2/1 | 26/2/0 | 26/2/0 | 28/0/0 | 21/0/7 | - | |
| Dimension | Significance Level | Number of Algorithms | χ2 | χ2 α[k−1] | p-Value | Null Hypothesis | Alternative Hypothesis |
|---|---|---|---|---|---|---|---|
| D = 30 | α = 0.05 | 7 | 91.62 | 12.50 | 1.39345×10−17 | Reject | Accept |
| Year | Supply | Year | Supply | Year | Supply |
|---|---|---|---|---|---|
| 2000 | 89.0365 | 2007 | 101.68 | 2014 | 133.4 |
| 2001 | 87.1 | 2008 | 92.11 | 2015 | 142.6 |
| 2002 | 73.1 | 2009 | 96.6 | 2016 | 138.4 |
| 2003 | 82.4 | 2010 | 108.2 | 2017 | 138.2 |
| 2004 | 85.57 | 2011 | 114.48 | 2018 | 159.3 |
| 2005 | 93.87 | 2012 | 116.9 | 2019 | 149.9 |
| 2006 | 100.44 | 2013 | 128.4 | 2020 | 135.2 |
| Vi,j | V1,1 = 2.1204 | V2,1 = 0.2963 | V3,1 = −2.1252 | V4,1 = −1.8276 | V5,1 = −1.6392 | |||
| V1,2 = −3.4353 | V2,2 = −1.4154 | V3,2 = −3.8704 | V4,2 = −2.5717 | V5,2 = 2.9983 | ||||
| V1,3 = −2.8525 | V2,3 = −0.5859 | V3,3 = −0.8830 | V4,3 = −2.2500 | V5,3 = 2.5122 | ||||
| V1,4 = 2.0599 | V2,4 = −1.8145 | V3,4 = −2.4980 | V4,4 = 2.2324 | V5,4 = −11.4764 | ||||
| V1,5 = 0.7585 | V2,5 = 2.8209 | V3,5 = −9.8287 | V4,5 = 3.2329 | V5,5 = −3.2925 | ||||
| V1,6 = −0.5469 | V2,6 = 0.5614 | V3,6 = −0.8615 | V4,6 = 0.8089 | V5,6 = 0.3829 | ||||
| V1,7 = 1.4614 | V2,7 = −0.3741 | V3,7 = −3.5242 | V4,7 = 2.1073 | V5,7 = −0.8814 | ||||
| V1,8 = −1.6766 | V2,8 = 1.1384 | V3,8 = −1.0364 | V4,8 = −2.4203 | V5,8 = 4.0111 | ||||
| T0 | T0,1 = −1.7852 | T0,2 = 5.8729 | T0,3 = 0.2750 | T0,4 = 2.4645 | T0,5 = 1.7107 | T0,6 = 0.1905 | T0,7 = 0.6535 | T0,8 = 0.4202 |
| Wi,j | W1,1 = 3.3681 | W2,1 = 1.7397 | W3,1=−2.2738 | W4,1 = −1.9837 | W5,1 = 0.5642 | W6,1=−3.6471 | W7,1=−1.8537 | W8,1 = 0.4153 |
| T1 | T1 = 1.6062 | |||||||
| Year | Pork Supply Volume | BP (Gradient Descent) | MSWOA_BP | ABC_BP | FASSA_BP | AVC-IMOA_BP | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Predicted Value | Relative Error | Average Relative Error | Predicted Value | Relative Error | Average Relative Error | Predicted Value | Relative Error | Average Relative Error | Predicted Value | Relative Error | Average Relative Error | Predicted Value | Relative Error | Average Relative Error | ||
| 2005 | 93.87 | 94.494 | 0.66470% | 1.68000% | 95.563 | 1.80358% | 3.08207% | 95.139 | 1.35233% | 0.94325% | 93.443 | 0.45456% | 2.62584% | 93.87000 | 0.000001% | 0.000001% |
| 2006 | 100.44 | 98.744 | 1.68853% | 96.910 | 3.51436% | 99.553 | 0.88350% | 97.647 | 2.78110% | 100.44000 | 0.000000% | |||||
| 2007 | 101.68 | 99.615 | 2.03126% | 99.707 | 1.94045% | 98.698 | 2.93291% | 94.676 | 6.88786% | 101.68000 | 0.000000% | |||||
| 2008 | 92.11 | 100.342 | 8.93669% | 100.683 | 9.30729% | 96.293 | 4.54162% | 98.192 | 6.60249% | 92.11000 | 0.000001% | |||||
| 2009 | 96.6 | 95.395 | 1.24786% | 100.211 | 3.73802% | 95.592 | 1.04387% | 95.655 | 0.97802% | 96.60000 | 0.000002% | |||||
| 2010 | 108.2 | 108.451 | 0.23230% | 107.849 | 0.32455% | 107.770 | 0.39724% | 109.922 | 1.59178% | 108.20000 | 0.000001% | |||||
| 2011 | 114.48 | 113.870 | 0.53328% | 114.490 | 0.00870% | 115.334 | 0.74561% | 114.705 | 0.19661% | 114.48000 | 0.000000% | |||||
| 2012 | 116.9 | 117.822 | 0.78886% | 118.366 | 1.25445% | 116.682 | 0.18688% | 118.936 | 1.74168% | 116.90000 | 0.000000% | |||||
| 2013 | 128.4 | 122.345 | 4.71590% | 124.828 | 2.78191% | 128.478 | 0.06087% | 124.856 | 2.76015% | 128.40000 | 0.000002% | |||||
| 2014 | 133.4 | 134.844 | 1.08244% | 140.365 | 5.22096% | 133.921 | 0.39041% | 139.325 | 4.44143% | 133.40000 | 0.000000% | |||||
| 2015 | 142.6 | 140.935 | 1.16729% | 138.748 | 2.70093% | 141.679 | 0.64612% | 135.837 | 4.74294% | 142.60000 | 0.000001% | |||||
| 2016 | 138.4 | 141.139 | 1.97878% | 142.598 | 3.03344% | 138.841 | 0.31868% | 142.426 | 2.90931% | 138.40000 | 0.000000% | |||||
| 2017 | 138.2 | 138.564 | 0.26325% | 142.911 | 3.40883% | 138.966 | 0.55450% | 139.717 | 1.09803% | 138.20000 | 0.000001% | |||||
| 2018 | 159.3 | 159.562 | 0.16418% | 147.836 | 7.19677% | 158.137 | 0.73001% | 154.342 | 3.11262% | 159.30000 | 0.000002% | |||||
| 2019 | 149.9 | 149.317 | 0.38882% | 148.734 | 0.77765% | 149.890 | 0.00634% | 149.182 | 0.47915% | 149.90000 | 0.000000% | |||||
| 2020 | 135.2 | 134.840 | 0.26604% | 138.311 | 2.30117% | 134.793 | 0.30111% | 136.871 | 1.23579% | 135.20000 | 0.000000% | |||||
| 2021 | 175.821 | 141.856 | 159.113 | 150.274 | 159.92 | |||||||||||
| 2022 | 153.896 | 148.885 | 153.209 | 154.735 | 161.26 | |||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.-Q.; Zhang, H.-Y.; Song, H.-H.; Zhang, P.-L.; Bei, J.-L. Prediction of Pork Supply Based on Improved Mayfly Optimization Algorithm and BP Neural Network. Sustainability 2022, 14, 16559. https://doi.org/10.3390/su142416559
Wang J-Q, Zhang H-Y, Song H-H, Zhang P-L, Bei J-L. Prediction of Pork Supply Based on Improved Mayfly Optimization Algorithm and BP Neural Network. Sustainability. 2022; 14(24):16559. https://doi.org/10.3390/su142416559
Chicago/Turabian StyleWang, Ji-Quan, Hong-Yu Zhang, Hao-Hao Song, Pan-Li Zhang, and Jin-Ling Bei. 2022. "Prediction of Pork Supply Based on Improved Mayfly Optimization Algorithm and BP Neural Network" Sustainability 14, no. 24: 16559. https://doi.org/10.3390/su142416559
APA StyleWang, J. -Q., Zhang, H. -Y., Song, H. -H., Zhang, P. -L., & Bei, J. -L. (2022). Prediction of Pork Supply Based on Improved Mayfly Optimization Algorithm and BP Neural Network. Sustainability, 14(24), 16559. https://doi.org/10.3390/su142416559