1. Introduction
A clean, energy-based transportation is now globally required as a major step to hold back climate change and the greenhouse effect. Electric vehicles (EVs) impose themselves as a promising alternative to the conventional diesel engine vehicles. Nowadays, extensive investments are focusing on developing EV-based technologies and their components, such as electric motor design, converter design, innovative control techniques, batteries, and battery chargers [
1]. However, one of the major challenges that has curbed the use of EVs widely is the limited range that car can go on one charge [
2]. This, in turn, sheds light on developing different charging technologies of EVs, starting from battery design and ending up with charger types. In this context, EV chargers are classified into two main categories: off-board and on-board chargers [
3].
Albeit off-board chargers are distinguished by their safety and fast charging competence, this option entails dedicated resources and infrastructure [
4]. On the other hand, on-board chargers offer a simple charging solution thanks to their capability of charging directly from AC plugs. However, the charging time is relatively slow due to onboard weight, volume, and cost constraints.
Lately, the idea of integrated on-board chargers has emerged as an alternative solution to overcome the limitations of on-board chargers [
5]. IOBCs employ propulsion components, namely, the converter and motor, in the charging process. Thus, the power flows from grid to the battery through the converter, while the motor acts as a smoothing filter. Examples of some single-phase IOBCs are reviewed in [
4]. Due to the limited power range of single-phase-based IOBCs, the three-phase IOBCs have shown accelerating potentials in recent literature [
6,
7]. The main control challenge of this technology is to ensure zero torque production under charging. From the machine point of view, based on the comprehensive review of EVs given in [
8], the permanent magnet and induction machines are likely the most common types employed in EVs [
9].
Recently, multiphase machines are being favored for EV drivelines over their three-phase counterparts. The fault-tolerance and reduced converter per-phase current/voltage ratings are the main merits of multiphase machines [
10,
11]. Different multiphase-based IOBC topologies have been proposed in the available literature [
10,
12,
13]. Currently, the six-phase induction machine (SPIM) has been preferred in recent literature to be a reasonable/compromised alternative for three-phase motors. Moreover, SPIM offers less complexity, is cost-effective, and is a more reliable solution compared to other phase orders. The SPIM can easily be rewound using the same standard three-phase stator frames with, theoretically, no practical constraints, besides its capability of being driven using off-the-shelf three-phase converters [
14,
15]. In the literature, six-phase machines have been proposed with three different winding layouts, namely, dual three-phase (D3P), asymmetrical six-phase (A6P), and symmetrical six-phase (S6P) [
16]. Another novel winding layout for six-phase machines, known as pseudo six-phase, has proved to offer a 5% enhancement in the torque density over conventional six-phase winding [
17].
Most of the up-to-date literature has emphasized controlling the SPIM under propulsion mode. However, considering SPIM in an IOBC system raises more challenges when standard current controllers are to be preserved. The control technique of a SPIM-based IOBC system should control the machine phase currents in a manner that ensures zero torque production during charging mode. To this end, literature has suggested different solutions to ensure zero torque production. For instance, the concept of phase transformation represents one of the proposed solutions that has been applied to symmetrical and asymmetrical SPIM-based IOBCs to nullify the torque production during battery pack charging [
13,
18]. In this latter technique, the machine stator is connected to the gird using a two-secondary winding transformer, while the converter is controlled in such a way as to ensure zero fundamental (αβ) current components using conventional PI controllers. In [
18], an alternative topology has been proposed and applied to either A6P or S6P machines, which enables fast-charging up to 100% of the traction power rating. The so-called vector PI resonant controller has been employed to control the system under either propulsion or charging modes. Another non-isolated IOBC topology that achieves 100% charging/propulsion power ratio has been proposed in [
19]. Even though this latter topology can successfully cancel out the average torque production, a notable pulsating torque component still exists. An attempt to reduce the converter complexity was suggested in [
20] by employing a nine-switch converter to drive a symmetrical SPIM in both charging and traction with a simple hardware reconfiguration.
Although most of the conducted research related to multiphase-based IOBC has been done under healthy conditions, [
10] has taken the initiative to control a nine-phase machine-based IOBC under postfault cases. The same objective has also been introduced in [
21] for a SPIM-based IOBC under postfault operation. However, this technique has only been able to cancel out the average torque production with a significant torque component due to the generated pulsating fundamental flux component.
Some recent studies have compared the symmetrical and asymmetrical winding configurations under both healthy as well as fault conditions [
22,
23]. A thorough comparative study between the three variations of six-phase winding configurations by investigating their air gap flux distributions under different excitations is provided by [
24]. The study showed that the D3P and S6P connections are very similar, whereas the equivalent reactance of an A6P connected winding is slightly higher due to the effect of leakage mutual inductance of a double layer winding design [
24]. The effect of stator winding connection on the harmonic mapping was also investigated by plotting the MMF distributions and their harmonic spectra under different excitations [
24].
To the best of the authors’ knowledge, literature has not investigated the effect of stator winding design as well as winding configuration of a SPIM-based non-isolated IOBC system on the induced low order harmonic currents and the line current quality under charging mode. All available literature has regarded the machine as a pure series inductance, while it has completely ignored the possible induced back emf harmonic voltage components due to phase-belt low order space harmonics. To this end, this paper investigates a SPIM-based IOBC with the three available winding configurations, namely, D3P, ASP, and S6P, under both healthy case (HC) and single open phase fault (1OPF) case. The effect of winding chording on the induced low order MMF space harmonics is first investigated to clarify the possible sources of these harmonic current components under charging. Hence, a general current controller structure with harmonic compensation (HC) for a general six-phase-based winding topology is then proposed for both healthy and postfault operation.
The paper is organized as follows.
Section 2 discusses the proposed winding connection with the grid.
Section 3 depicts the MMF harmonic spectra due to different sequence current excitations related to each winding layout. The required optimum set of phase currents under both healthy and 1OPF case are derived in
Section 4 for the three possible connections. The proposed controller structure that ensures the main objectives while respecting the imposed constraints under charging is then introduced in
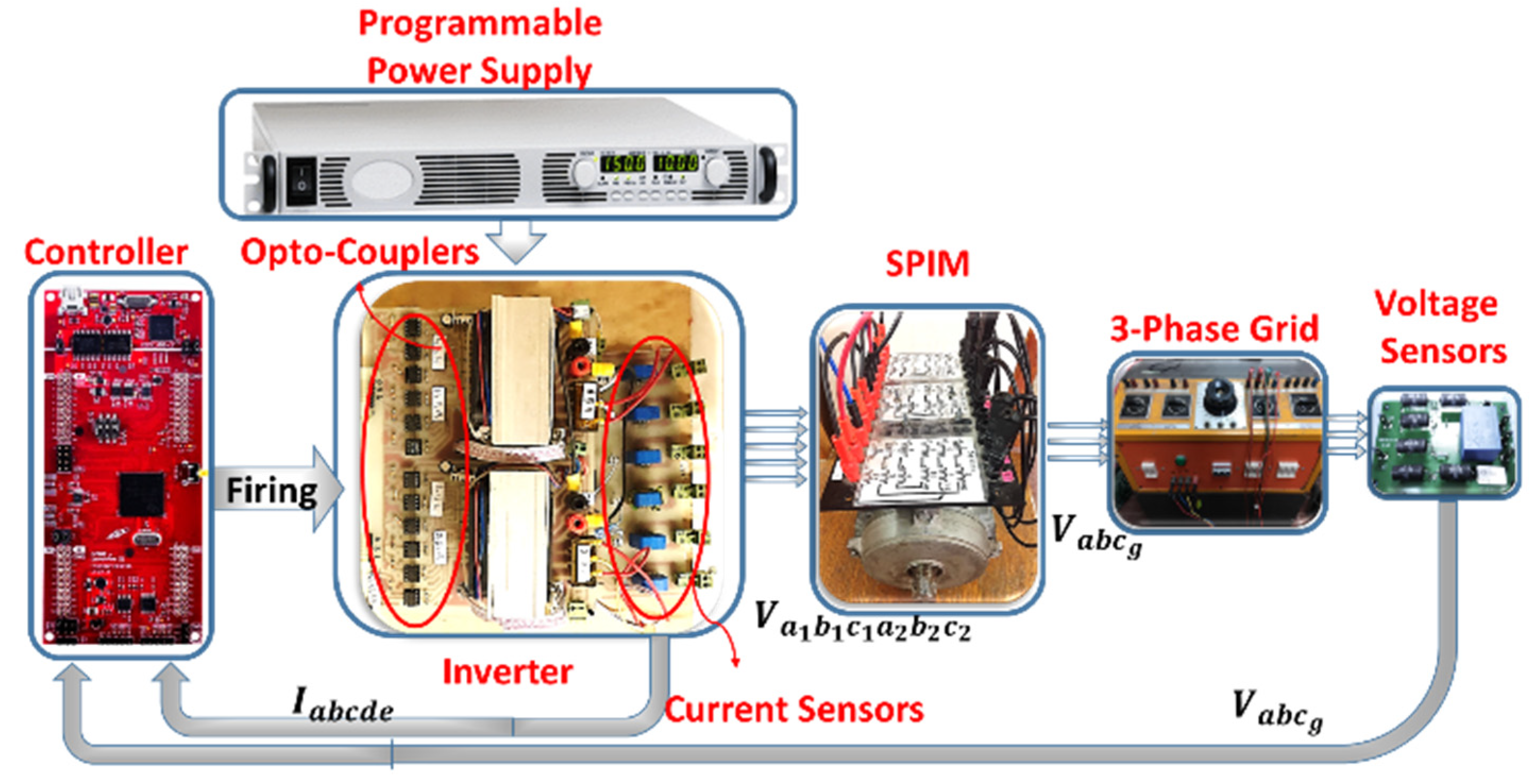
Section 5. The experimental validation is discussed in
Section 6. Finally, the paper is summarized in
Section 7.
2. Six-Phase-Based IOBC Connection with Grid
This section discusses the required connection of the stator winding to integrate a general SPIM-based non-isolated IOBC with the grid. When non-isolated IOBC topologies are employed, the machine acts as a single neutral (1N) SPIM; therefore, the nonavoidable circulating current component should be properly controlled to ensure high-quality phase currents. The IOBC connection will be evaluated for the three winding layouts (D3P, A6P, and S6P) with and without winding chording employed.
For the three winding configurations of a SPIM, namely, D3P, A6P and S6P, the corresponding arbitrary spatial phase-shift angle
between the two three-phase winding sets are
, and
, respectively. The six-phase machine has three main subspaces, namely, the fundamental subspace (
), secondary subspace (
), and zero subspace (
). The vector space decomposition (VSD) [
24] matrix that correlates the sequence components (i.e.,
and the phase quantity components (current or voltage) with a general arbitrary angle,
, is given by (1).
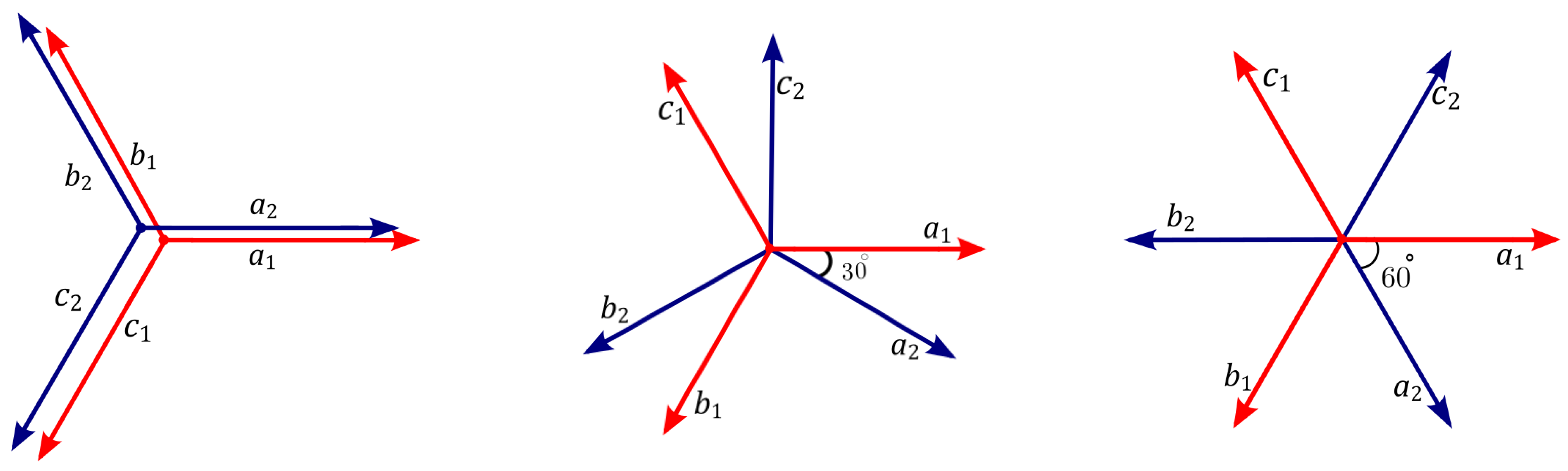
Under propulsion mode, the fundamental subspace current components,
, are exclusively utilized for torque production, while other sequence currents are controlled to zero to ensure a ripple-free torque production with high quality phase currents. On the other hand, the charging mode utilizes the secondary subspace current components,
, only, while other sequence currents are controlled to zero. Under propulsion mode, and by setting the
current components to
and
, the resultant phase currents from the inverse of (2) will yield a phase shift angle between the three-phase sets of
, and for the D3P, A6P, and S6P machines, respectively, as clarified in
Figure 1. Meanwhile, under charging mode, setting the
current components to
and
results in set of phase currents with a phase shift angle between the two three-phase sets of
, and
for the D3P, A6P, and S6P machines, respectively, as shown in
Figure 1.
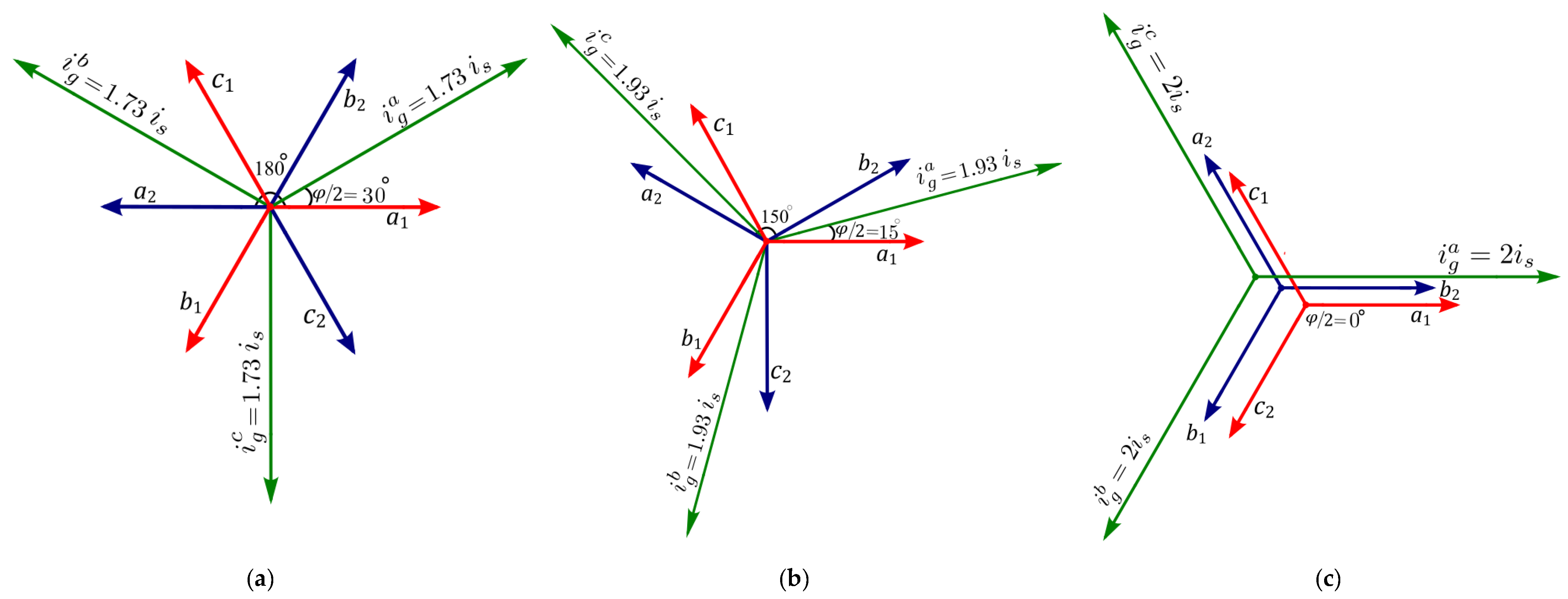
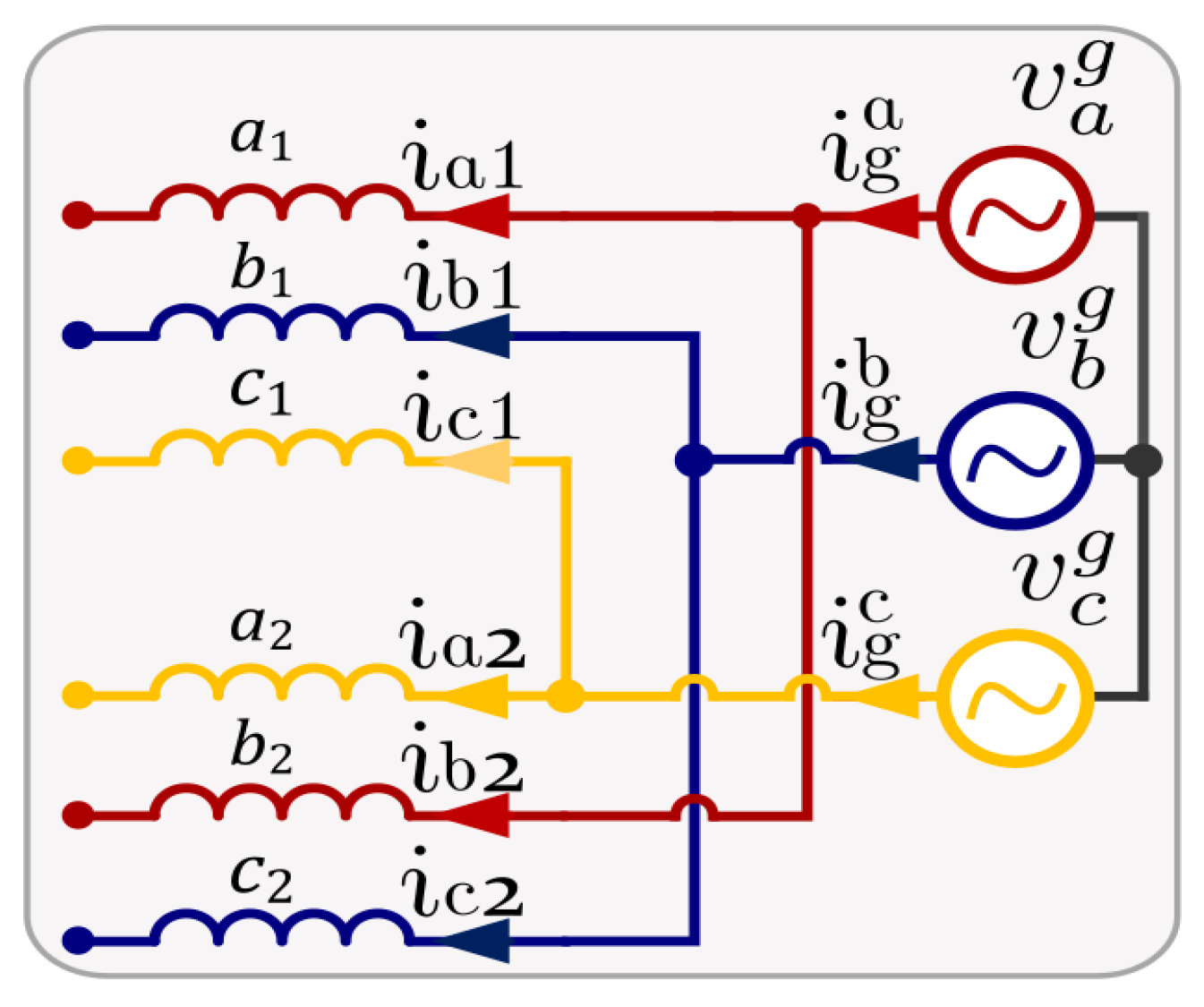
Based on the current phasors under charging given in
Figure 1, the suggested external connection of the three available configurations to integrate the six-phase machine with the grid are shown in
Figure 2. This connection maximizes the charging line current while nullifying the torque production inside the machine. By looking at the current phasor diagram under
excitation shown in
Figure 1, adding (
and
), (
and
), and (
and
) together result in a line current magnitude equal to
, and
times the phase current for the three connections, respectively. Therefore, connecting the end terminals (
a1 and
b2), (
b1 and
c2), and (
c1 and
a2) of the six-phase stator together with the grid lines (
), while exciting the
subspace only, will maximize the charging line currents and ensure zero torque production.
3. MMF Spectra of Different Winding Layouts
In AC winding, coil chording is usually employed to obtain a high-quality flux distribution under fundamental
excitation. In all available literature, the flux distributions under non-fundamental subspace excitations (i.e.,
and
) were ideally assumed to be zero. This assumption was recently found to be rather ideal, especially when winding chording is applied to improve the fundamental flux [
24]. In this section, the effect of winding chording on the stator MMF spectra is investigated and compared with fully pitched stators for the three available configurations. Since the IOBC control algorithm utilizes only the
subspace in the charging process, the focus will be directed to the MMF spectra under
excitation. A 24-slot, 4-pole stator is employed for this comparison. It has been shown in [
24] that a 24-slot with 12 phases can be used to construct any of the 3 6-phase winding layouts by externally connecting certain pairs of phases in such a way as to produce 6 terminals only. In the available literature, a 5/6 coil pitch is commonly employed in practical six-phase induction machines [
24], which will also be used for the chorded winding case in this study.
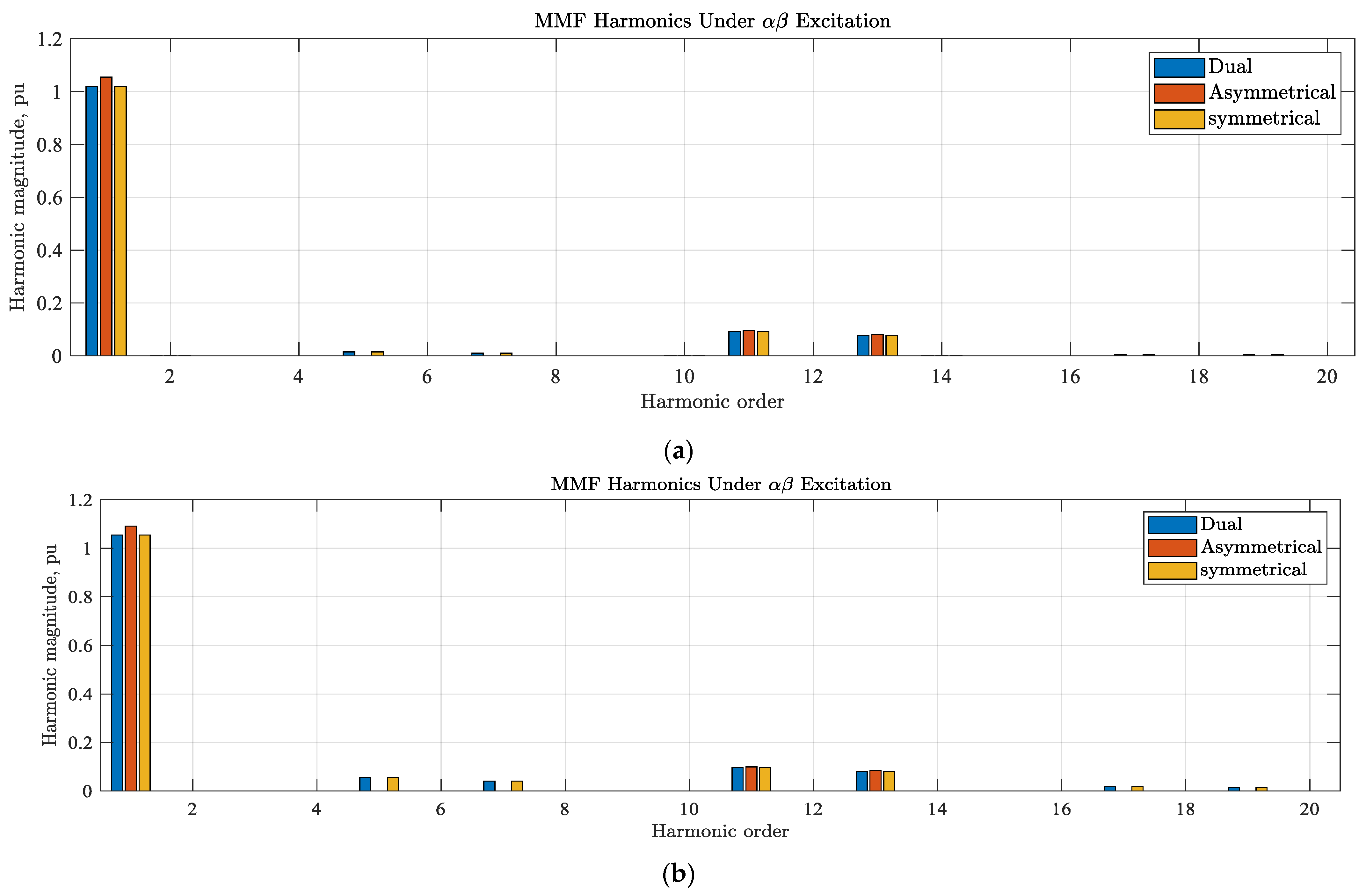
Figure 3 shows the MMF spectra under αβ excitation (propulsion mode). It is clear that chording the stator winding with one slot is essential under D3P and S6P to minimize the 5th and 7th low order space harmonics; however, it affects the fundamental component, when compared with the A6P case.
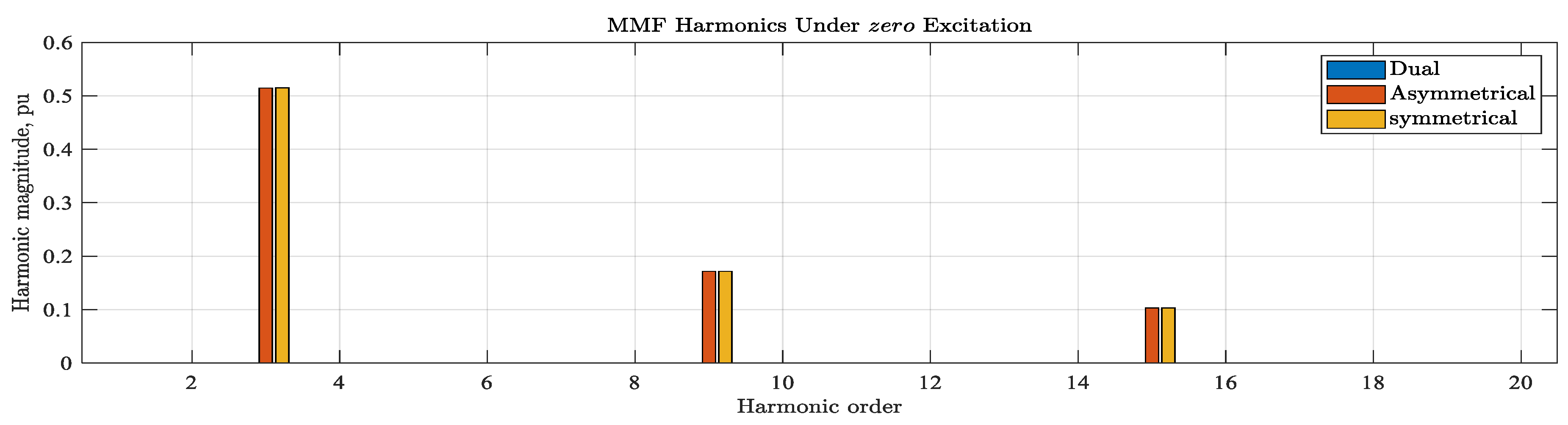
On the other hand,
Figure 4 illustrates the MMF spectra under
excitation (charging mode). It is obvious that both D3P and S6P have the same MMF spectra under chorded winding with clear, even harmonic components, indicating asymmetrical flux distribution under this excitation profile. Although these space harmonics will increase the leakage inductance of the
subspace [
24], which will improve current quality under charging, they are also expected to induce undesirable harmonics in the phase currents. On the other hand, the two winding layouts (D3P and S6P) correspond to zero magnetizing flux when fully pitch winding is employed.
Figure 4 also shows the MMF spectra of an A6P stator, where the 5th and 7th harmonics represent the dominate harmonics in both chorded and un-chorded windings. Clearly, the magnitude of these two harmonics are larger under un-chorded winding, and thus, the
inductance is expected to be larger for the un-chorded A6P machine [
24].
In the available literature [
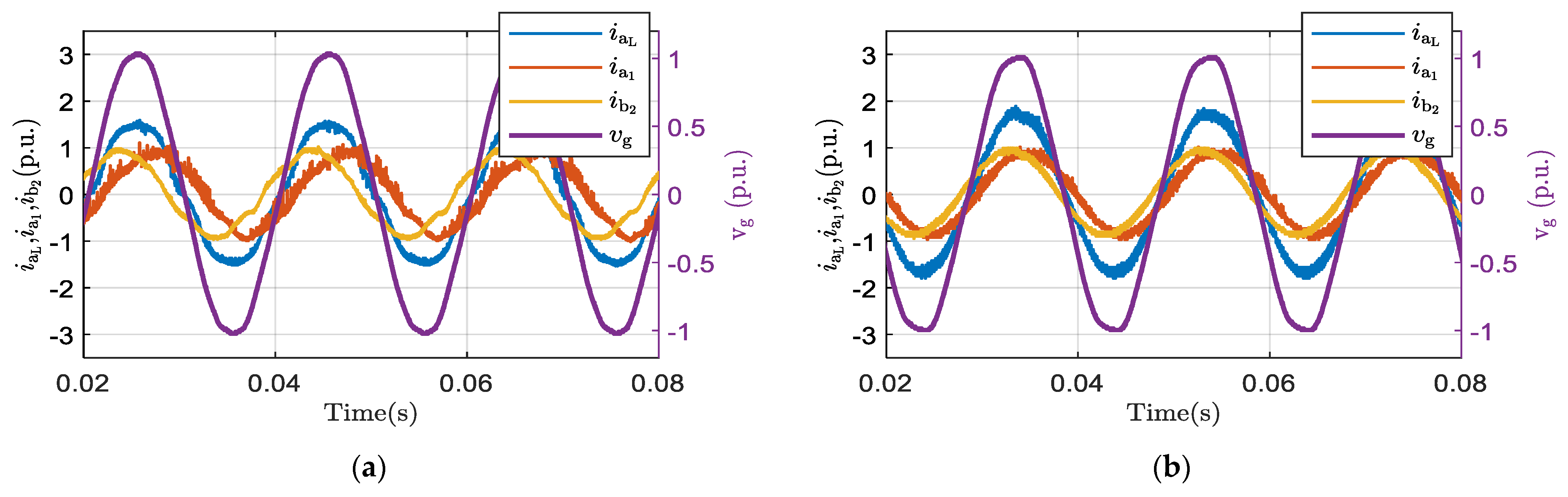
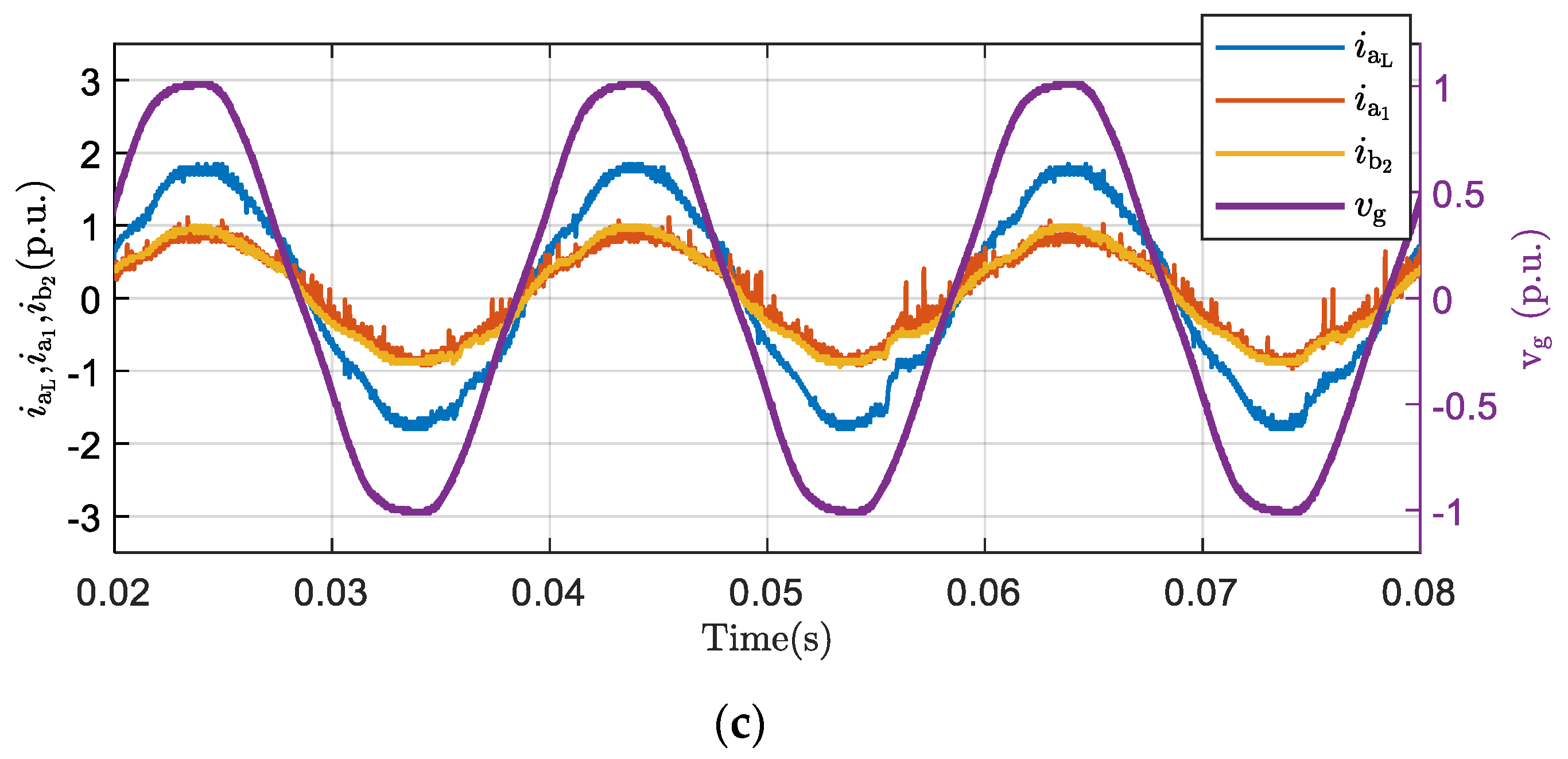
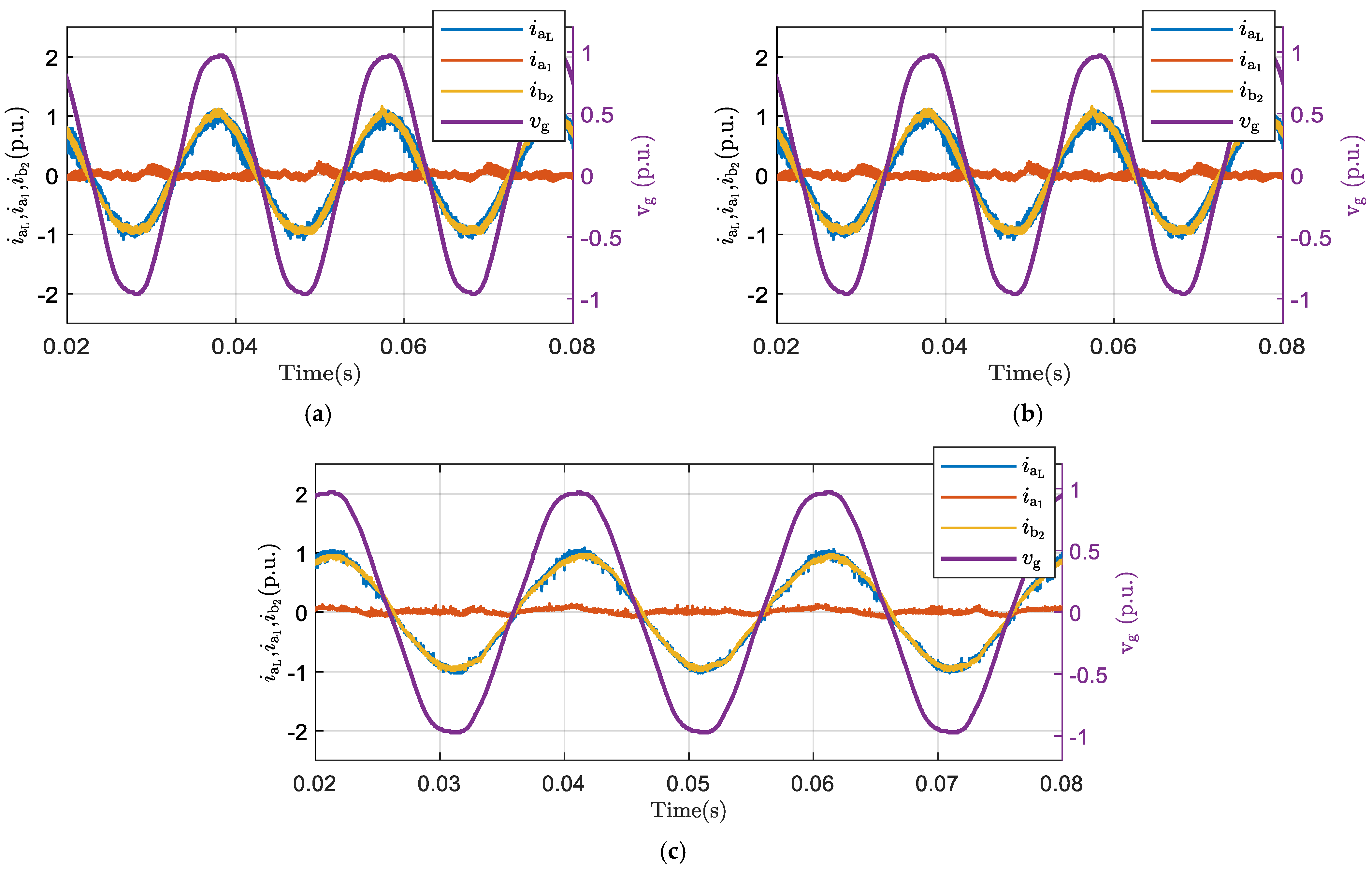
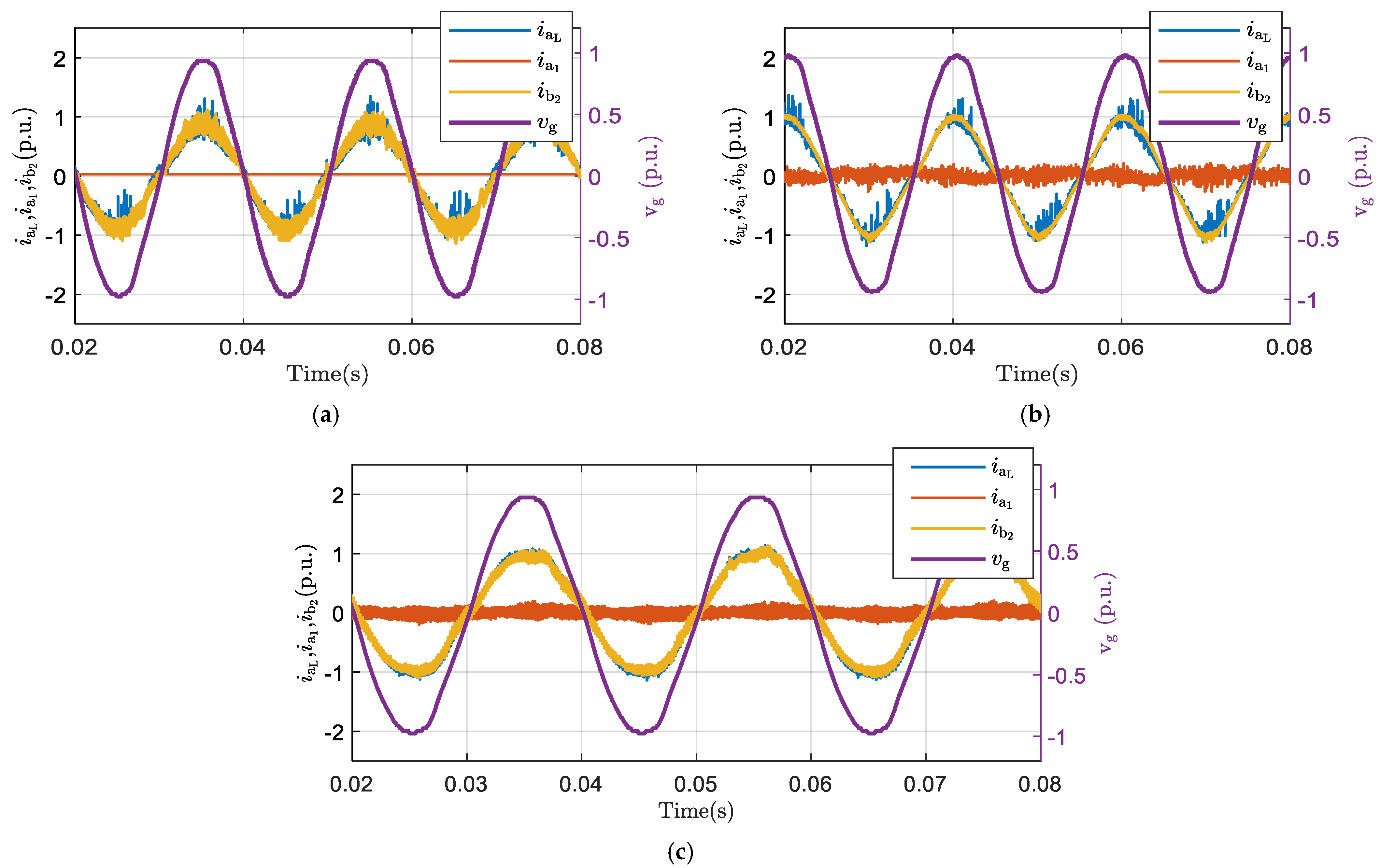
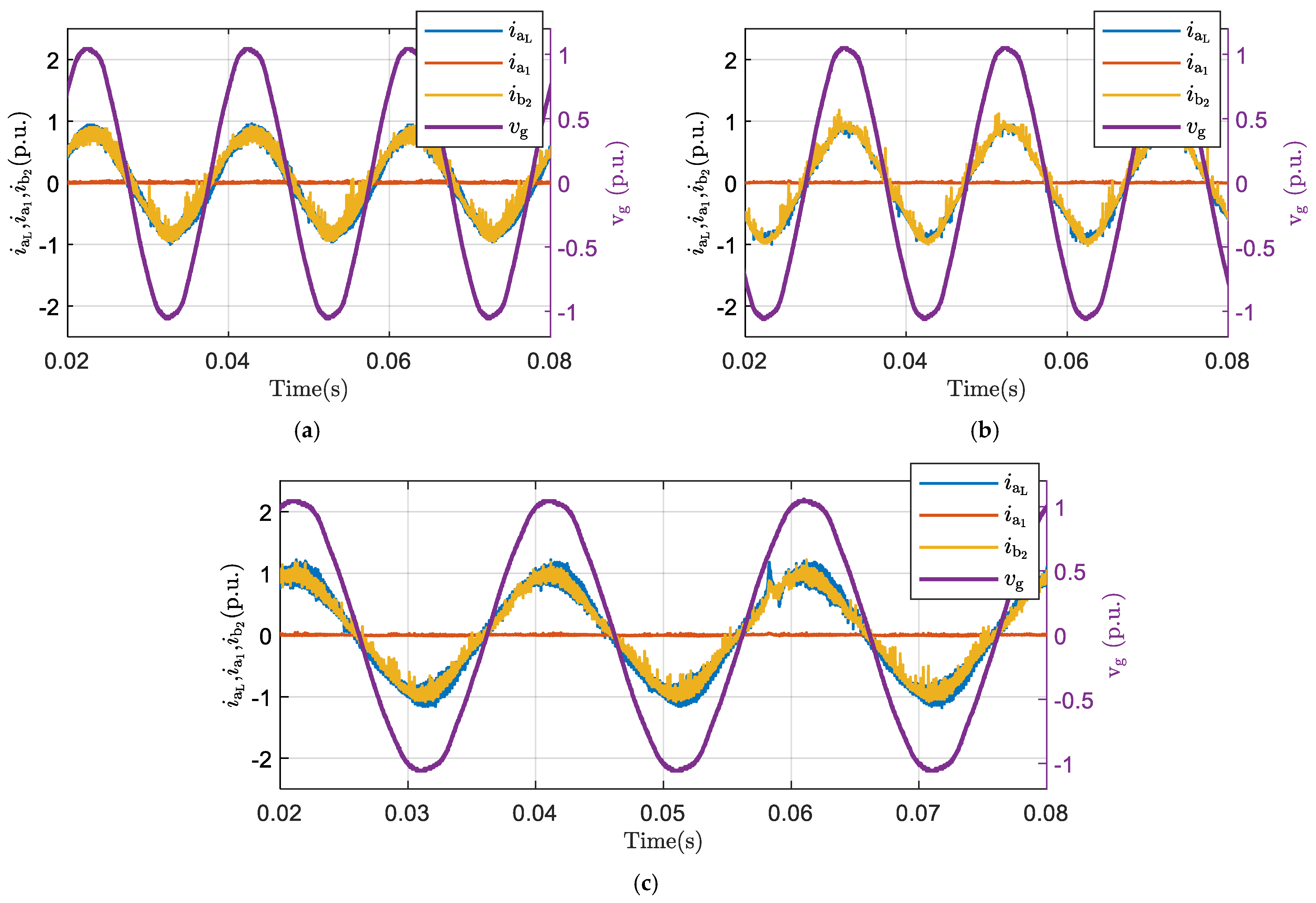
19], harmonic current compensation was proposed to suppress the induced harmonic current due to grid distortion. However, to the best of the authors’ knowledge, literature has discarded the effect of the stator phase-belt harmonics on the current quality of the IOBC-based systems, which represents the main contribution of this study. It is expected that harmonic current compensation will be essential when even space harmonics are presenting in the stator airgap, which is the case for both D3P and S6P with chorded winding. Since no even harmonics are likely to present in the A6P stator, harmonics current compensation is not essential.
Under healthy operation, the
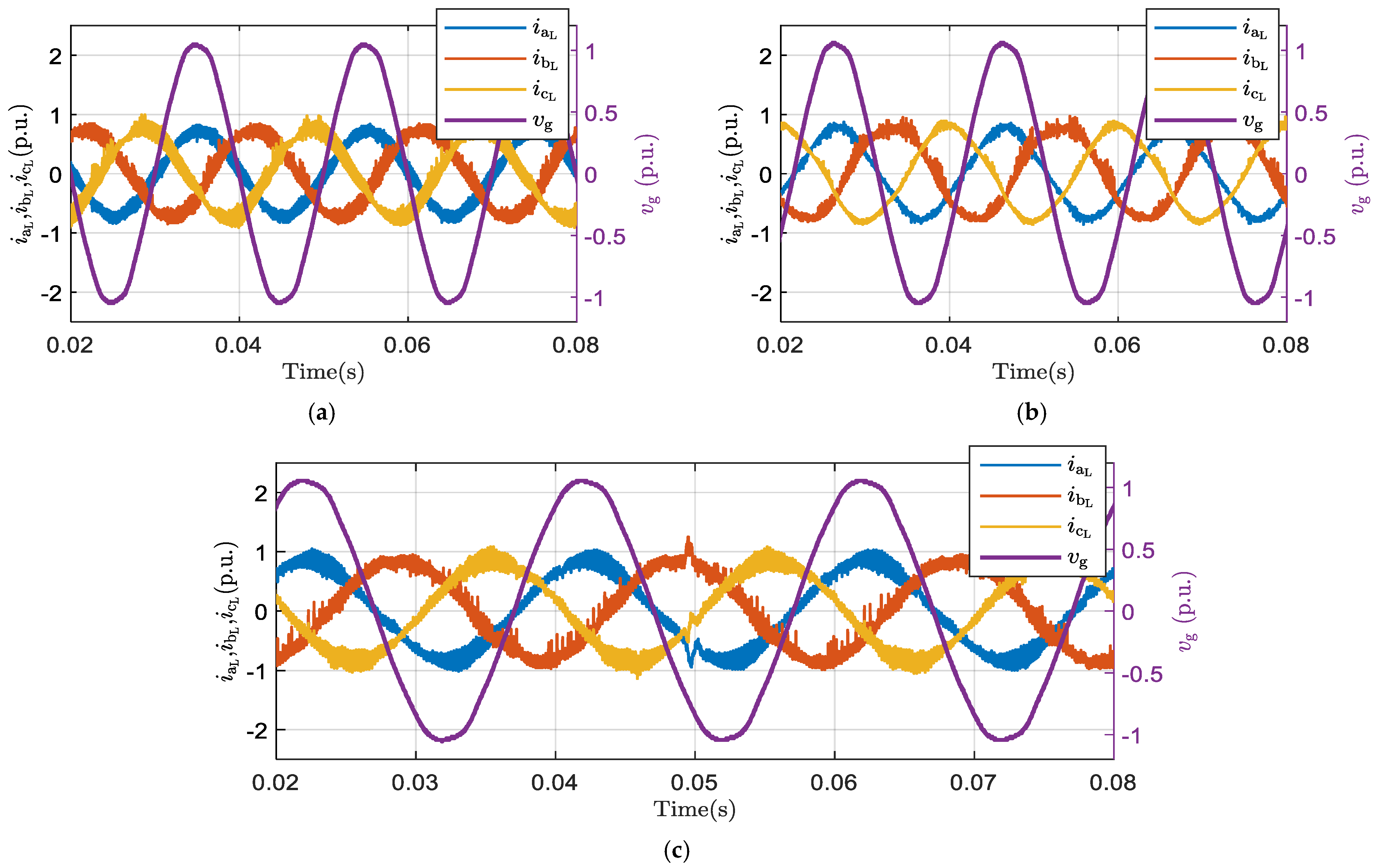
sequence components are controlled to zero, hence, their effect may be discarded. However, under postfault operation with one phase open,
components are used to ensure balanced, three-phase line currents, as shown in the next section. Under this latter case, the produced space harmonics due to this subspace should be taken into consideration.
Figure 5 shows the MMF spectra under
sequence excitation. Under this excitation profile, the spectra of the three winding layouts seem to be the same for both chorded/un-chorded machines.
5. Proposed General Current Proportional Resonant-Based Controller
In most available literature, conventional PR or synchronous PI controllers are shown to be suitable in grid connection and drive applications [
25,
26]. The same current controller structure can be preserved under both propulsion and charging modes through exciting the proper subspace according to the desired mode of operation. Hence, a PR current controller will be employed in this study.
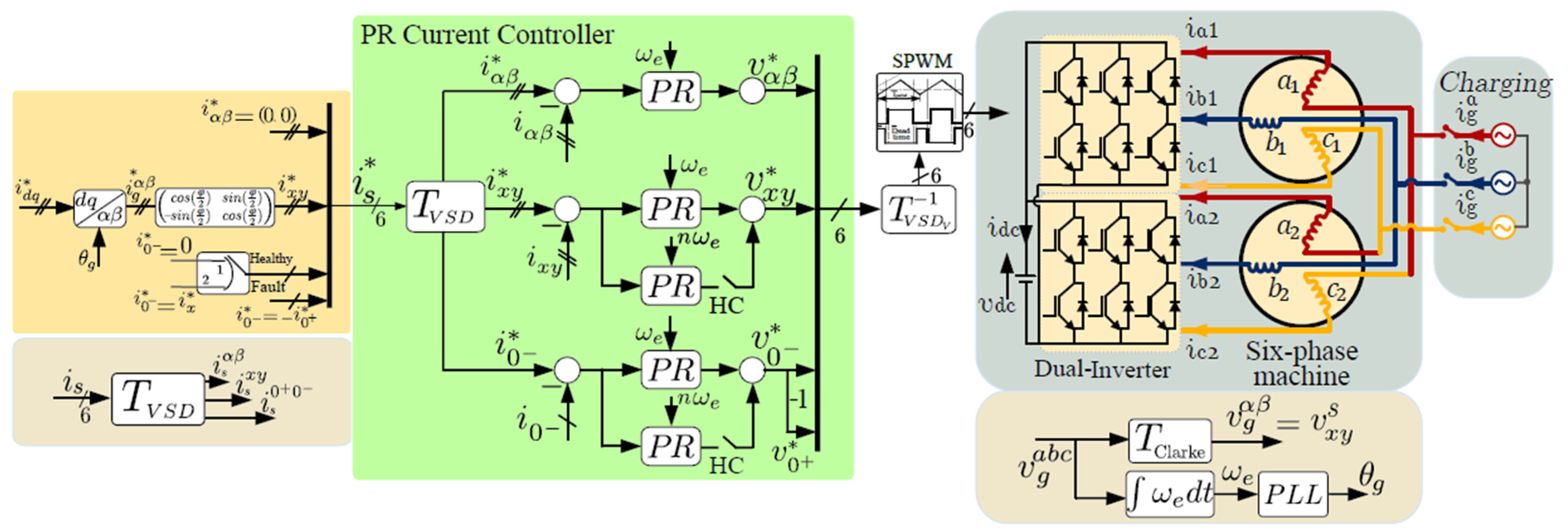
Figure 6 shows the block diagram of the proposed PR-based general current controller. Although the control algorithm is the same for all the three configurations, the harmonic compensating (HC) voltage terms depend on the machine winding layout. The proposed controller consists of three main stages. In the first stage, the reference sequence current components are derived based on the reference
grid current components, where the reference
component controls the charging level, while
is set to zero to ensure unity power factor. The corresponding reference
grid currents,
, are then obtained using the inverse Park’s transformation, while synchronization with the grid is simply done using a phase-locked loop. The stator
reference currents are set equal to the
grid currents,
. It is noteworthy from
Figure 1 that any grid line current is leading the corresponding phase current of the first three-phase set by an angle
. Therefore, in order to achieve a unity power factor charging,
should be aligned with the grid voltage by rotating the machine reference
current components by the same angle,
. The fundamental subspace sequence currents,
, of the SPIM are set to zero to ensure zero torque production. Finally,
components are set to zero under healthy conditions, whereas the reference values of this subspace are derived based on (7) under 1OPF.
The second stage represents the PR-based current controllers, where a pair of PR controllers are used to control each subspace. Since
, a single PR controller is used to derive the
sequence voltage components (
). In both the
and
subspaces, additional pairs of PR controllers are also used to compensate for the dominant low order harmonic current component induced in these subspaces. The harmonic compensation is enabled via HC switches shown in
Figure 6. According to experimentation, the 5th and 3rd harmonics are the dominant harmonics in the
and
subspaces, respectively.
In the third controller stage, the output voltage components of the PR controllers are transformed to their phase quantities using the inverse transformation given by (1). Conventional SPWM is then used to derive the six-phase inverter.
Under postfault operation, the same controller structure is used, which represents the main advantage of the proposed PR current controller. Referring to the analysis given in
Section 4, only the reference value of the
subspace is changed to be
instead of zero under healthy case.
7. Conclusions
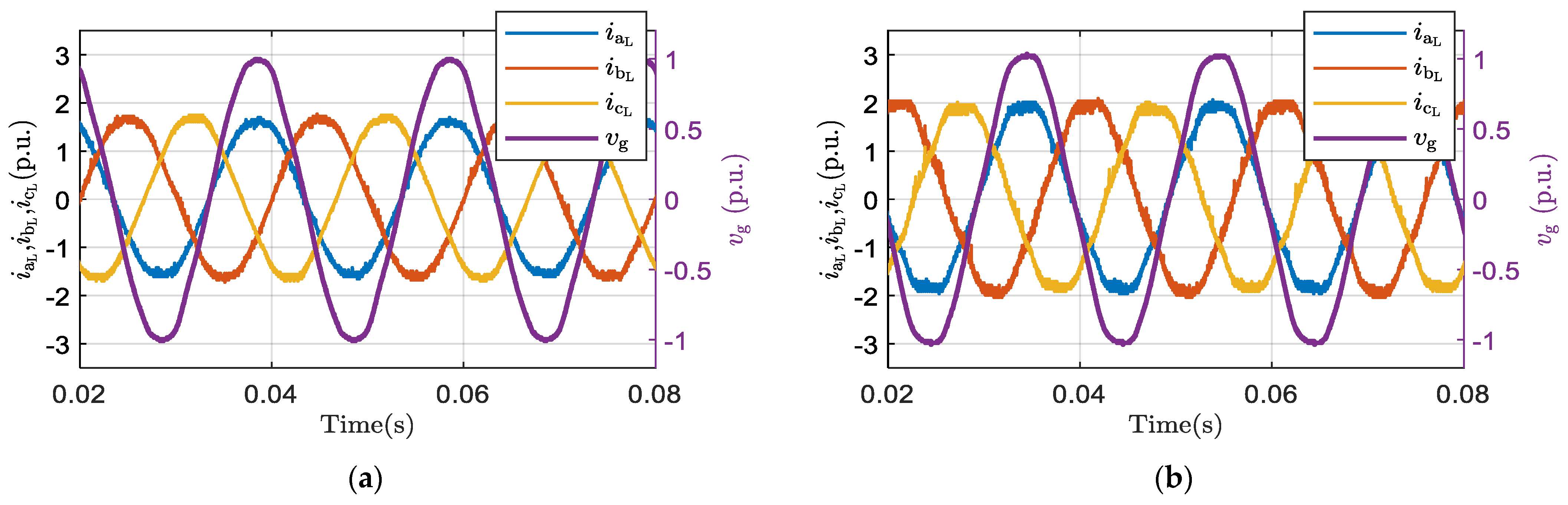
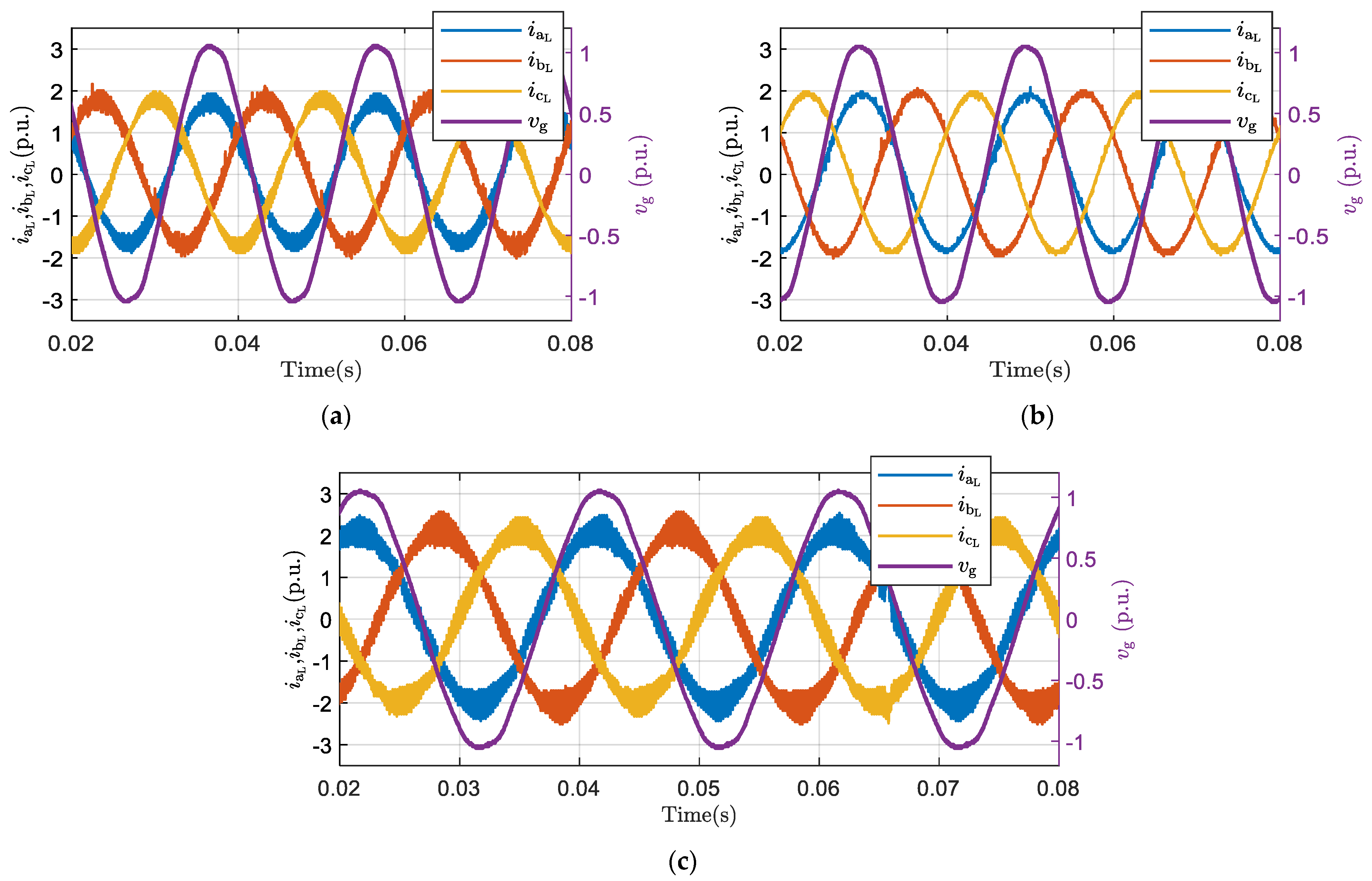
This paper investigated the effect of winding configuration on the performance of a SPIM-based non-isolated IOBC. The required stator connections to the grid were also suggested, which ensure minimum winding reconfigurations, maximum possible line to phase current magnitude ratio, and zero torque production. The maximum charging power percentages were therefore 86.6%, 96.5%, and 100% of the rated machine power for the D3P, A6P, and S6P configurations, respectively. The effect of the winding design (chorded or un-chorded designs) on the induced space harmonics was also clarified. Upon which, the required general current controller was derived that ensures high quality current waveforms. In the case of the chorded six-phase machine, the even low order space harmonics cause a notable current distortion and induce a notable 5th order harmonic current with the D3P and S6P cases. Whereas, although employing fully pitched coils cancels out all even order MMF space harmonics, the correspondent inductance of the xy subspace is significantly reduced, which increases the ripple content in the current waveform for the same switching frequency. The MMF spectrum of the A6P machine showed that in the case of either chorded or un-chorded six-phase machines, there is odd low order space harmonics which does not affect the machine current quality. The optimal phase currents and the required percentage derating under 1OPF has also been derived for the three possible connections. Under post-fault operation, 3rd harmonic compensation was needed in the A6P and S6P cases due to circulating components. A comparative case study has been carried out based on experiments to validate the theoretical findings. Furthermore, the low order harmonic current compensation has been introduced using additional pairs of PR controllers for each harmonic component (3rd and 5th). In conclusion, the results showed that the S6P configuration with un-chorded winding represents the best compromise in terms of line current magnitude and quality.


 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}