
Nonlinear Relationships between Vehicle Ownership and Household Travel Characteristics and Built Environment Attributes in the US Using the XGBT Algorithm

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Background: Employment of NHTS Dataset
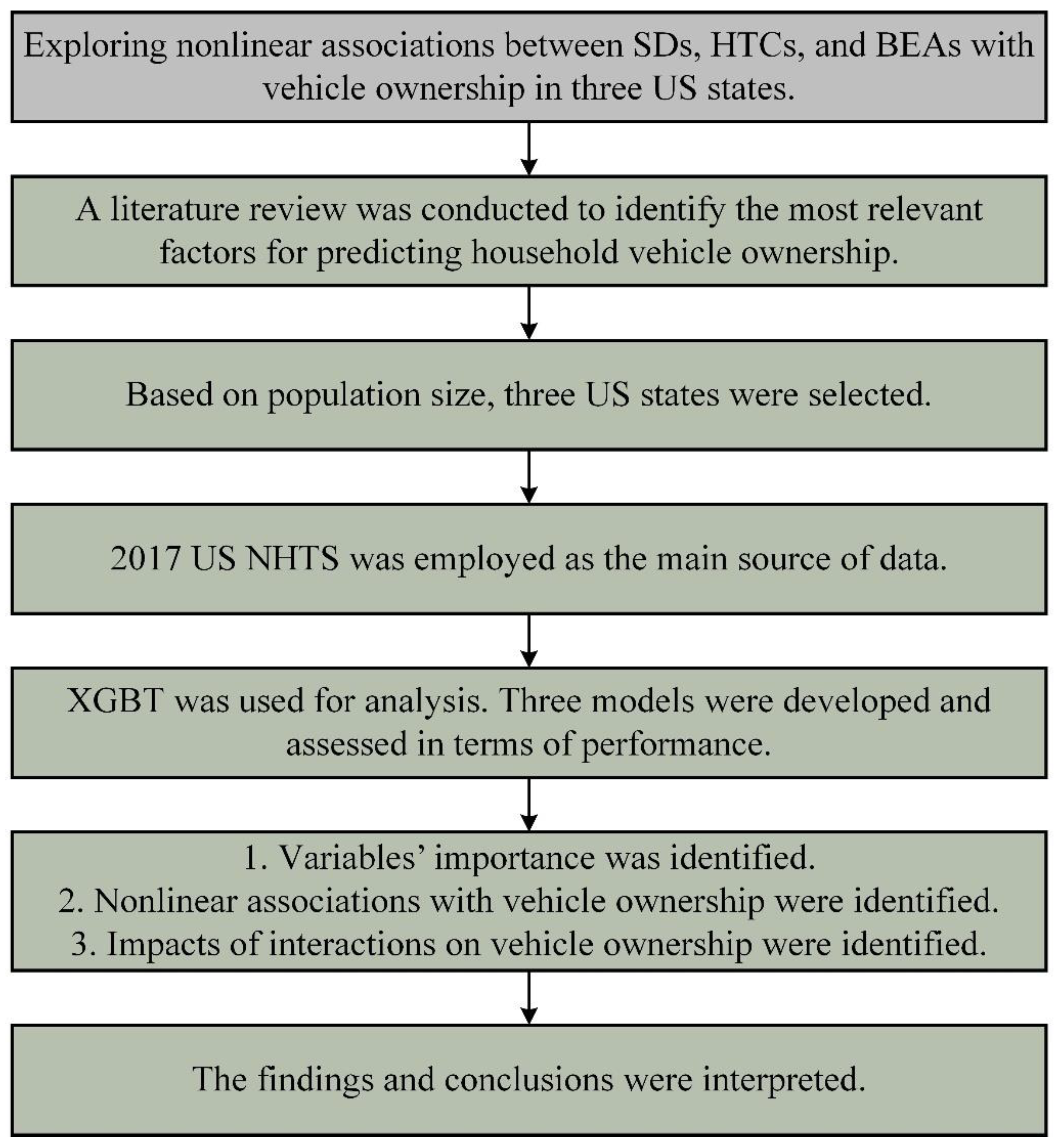
3. Methodology
3.1. Extreme Gradient Boosting (XGBT)
3.2. Data
4. Results
4.1. Nonlinear Models Development and Performance Assessment
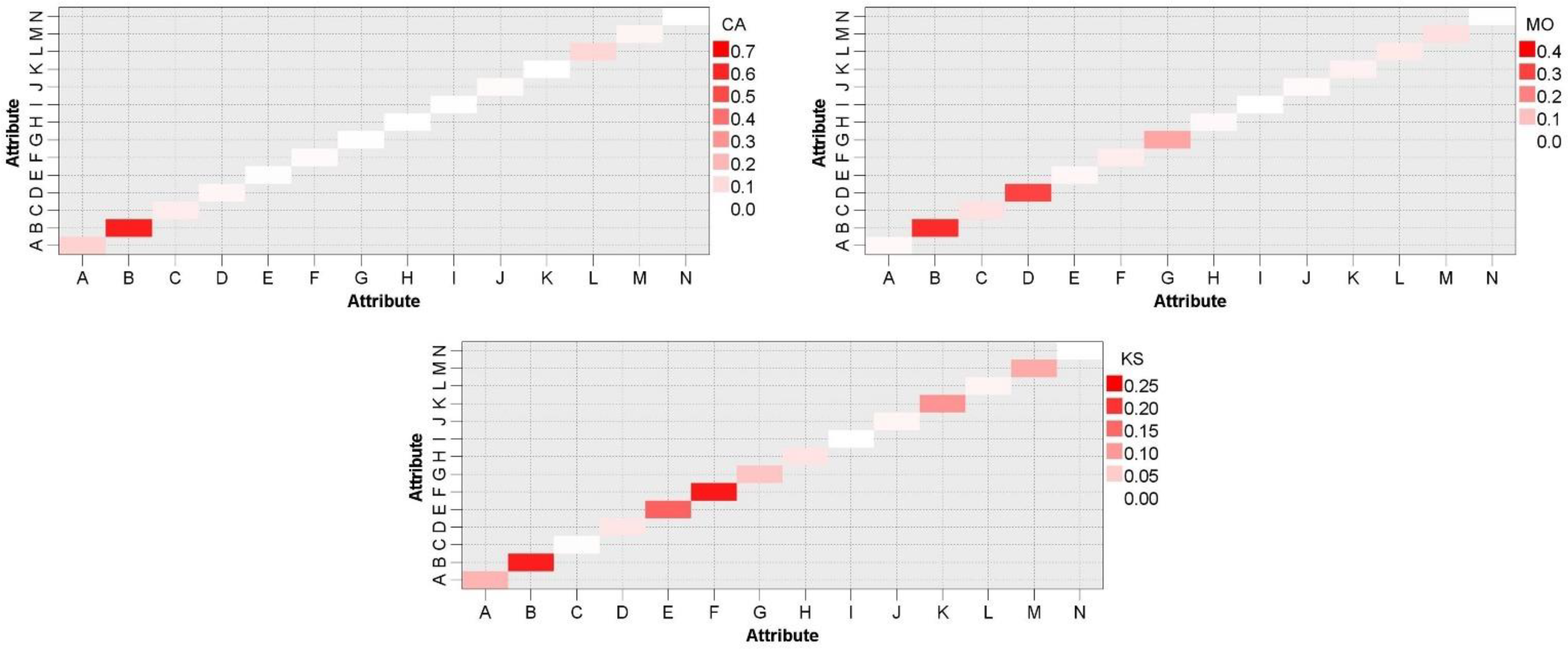
4.2. Variables’ Importance
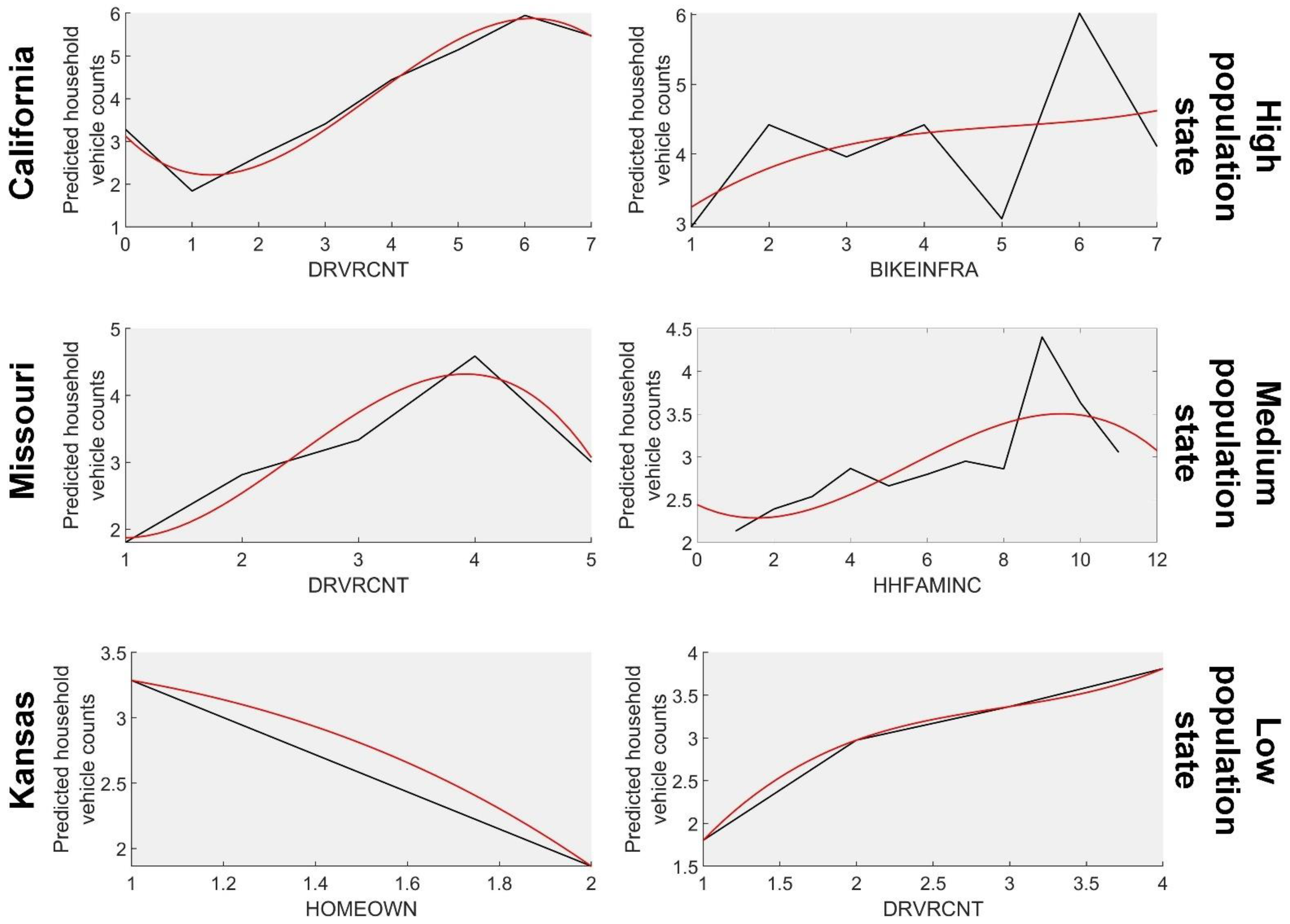
4.3. Nonlinear Associations with Car Ownership
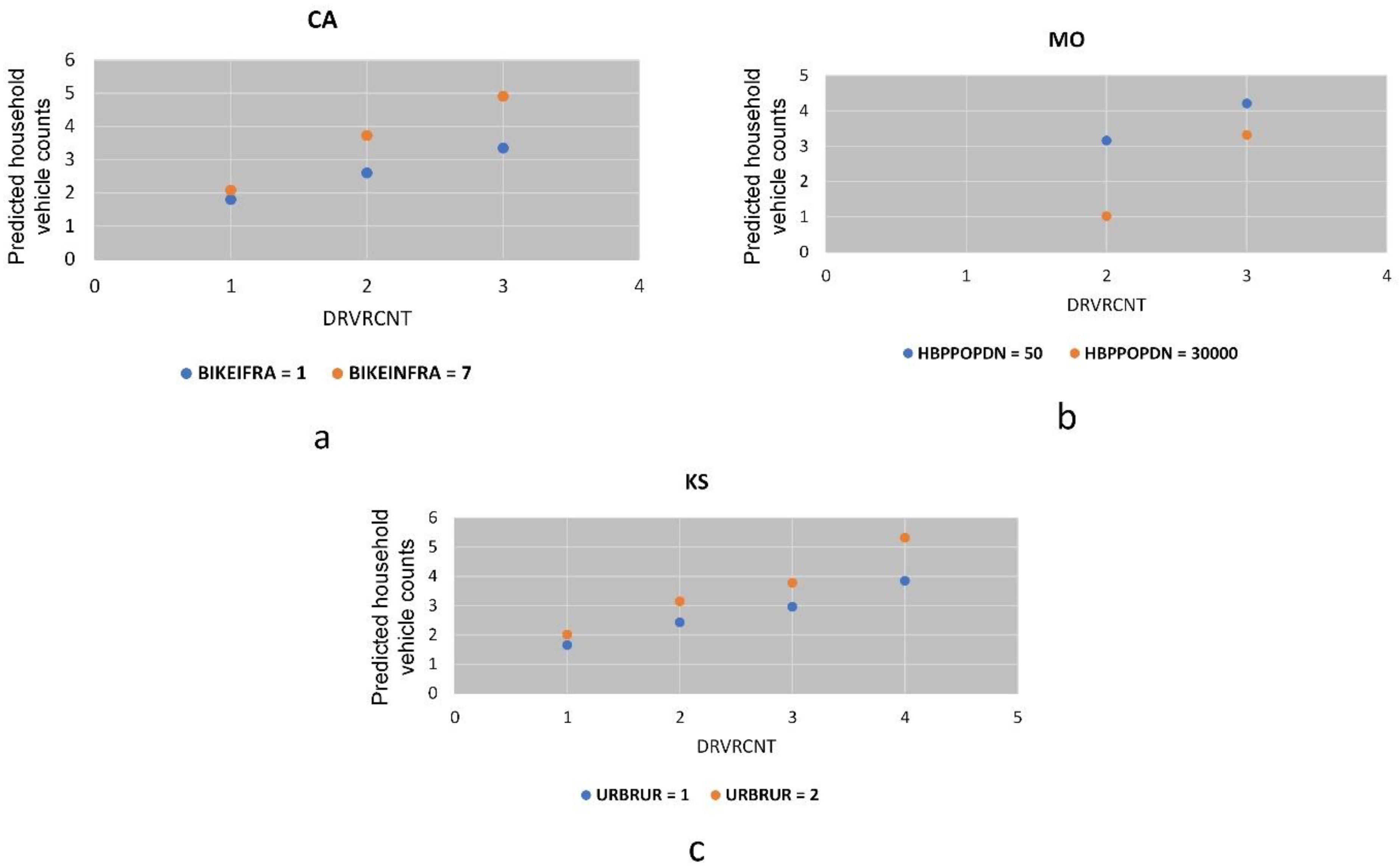
4.4. Impacts of Interactions on Vehicle Ownership
5. Discussions
5.1. Findings’ Implications
5.2. Limitations
6. Conclusions
- In California, the predictability of vehicle ownership was driven by household travel characteristics (CI: 0.62). In this state, the number of drivers in a household and the deficiencies in cycling infrastructure were the two most important factors in predicting vehicle ownership.
- In Missouri, sociodemographic factors were dominant factors in predicting vehicle ownership (CI: 0.53). The number of drivers in a household and household income were the two most important predictors of vehicle ownership in Missouri.
- In Kansas, sociodemographic factors were the most influential factors in predicting vehicle ownership (CI: 0.55). Home ownership and the number of drivers in a household were the most influential factors in vehicle ownership in Kansas.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bureau of Transportation Statistics. National Household Travel Survey Daily Travel Quick Facts. Available online: https://www.bts.gov/statistical-products/surveys/national-household-travel-survey-daily-travel-quick-facts (accessed on 1 February 2022).
- Handy, S.L.; Boarnet, M.G.; Ewing, R.; Killingsworth, R.E. How the built environment affects physical activity: Views from urban planning. Am. J. Prev. Med. 2002, 23, 64–73. [Google Scholar] [CrossRef]
- Zhao, P.; Zhang, Y. Travel behaviour and life course: Examining changes in car use after residential relocation in Beijing. J. Transp. Geogr. 2018, 73, 41–53. [Google Scholar] [CrossRef]
- Zegras, C. The built environment and motor vehicle ownership and use: Evidence from Santiago de Chile. Urban Stud. 2010, 47, 1793–1817. [Google Scholar] [CrossRef]
- Sabouri, S.; Tian, G.; Ewing, R.; Park, K.; Greene, W. The built environment and vehicle ownership modeling: Evidence from 32 diverse regions in the US. J. Transp. Geogr. 2021, 93, 103073. [Google Scholar] [CrossRef]
- Ao, Y.; Chen, C.; Yang, D.; Wang, Y. Relationship between rural built environment and household vehicle ownership: An empirical analysis in rural Sichuan, China. Sustainability 2018, 10, 1566. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.H.; Mokhtarian, P.L. Taste heterogeneity as an alternative form of endogeneity bias: Investigating the attitude-moderated effects of built environment and socio-demographics on vehicle ownership using latent class modeling. Transp. Res. Part A Policy Pract. 2018, 116, 130–150. [Google Scholar] [CrossRef]
- Rahul, T.; Verma, A. The influence of stratification by motor-vehicle ownership on the impact of built environment factors in Indian cities. J. Transp. Geogr. 2017, 58, 40–51. [Google Scholar] [CrossRef]
- Ruas, E.B. The Influence of Shared Mobility and Transportation Policies on Vehicle Ownership: Analysis of Multifamily Residents in Portland, Oregon. Ph.D. Thesis, Portland State University, Portland, OR, USA, 2019. [Google Scholar]
- Li, J.; Walker, J.L.; Srinivasan, S.; Anderson, W.P. Modeling private car ownership in China: Investigation of urban form impact across megacities. Transp. Res. Rec. 2010, 2193, 76–84. [Google Scholar] [CrossRef]
- Song, S.; Diao, M.; Feng, C.-C. Effects of pricing and infrastructure on car ownership: A pseudo-panel-based dynamic model. Transp. Res. Part A Policy Pract. 2021, 152, 115–126. [Google Scholar] [CrossRef]
- Dargay, J.M.; Madre, J.-L.; Berri, A. Car ownership dynamics seen through the follow-up of cohorts: Comparison of France and the United Kingdom. Transp. Res. Rec. 2000, 1733, 31–38. [Google Scholar] [CrossRef]
- Yang, Z.; Jia, P.; Liu, W.; Yin, H. Car ownership and urban development in Chinese cities: A panel data analysis. J. Transp. Geogr. 2017, 58, 127–134. [Google Scholar] [CrossRef]
- Ma, Z. Multi-level Probabilistic Model for Population Synthesis and Vehicle Ownership Modeling Based on Samples with Missing Values. Master’s Thesis, McGill University, Montreal, QC, Canada, 2021. [Google Scholar]
- Cirillo, C.; Liu, Y. Vehicle ownership modeling framework for the state of Maryland: Analysis and trends from 2001 and 2009 NHTS data. J. Urban Plan. Dev. 2013, 139, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Chu, M.Y.; Law, T.H.; Hamid, H.; Law, S.H.; Lee, J.C. Examining the effects of urbanization and purchasing power on the relationship between motorcycle ownership and economic development: A panel data. Int. J. Transp. Sci. Technol. 2020; in press. [Google Scholar] [CrossRef]
- Dargay, J.; Hanly, M. Volatility of car ownership, commuting mode and time in the UK. Transp. Res. Part A: Policy Pract. 2007, 41, 934–948. [Google Scholar] [CrossRef] [Green Version]
- Bhat, C.R.; Paleti, R.; Pendyala, R.M.; Lorenzini, K.; Konduri, K.C. Accommodating Immigration Status and Self-Selection Effects in a Joint Model of Household Auto Ownership and Residential Location Choice. Transp. Res. Rec. 2013, 2382, 142–150. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhao, P. Exploring car ownership and car use in neighborhoods near metro stations in Beijing: Does the neighborhood built environment matter? Transp. Res. Part D Transp. Environ. 2017, 56, 1–17. [Google Scholar] [CrossRef]
- Huang, X.; Cao, X.J.; Yin, J.; Cao, X. Effects of metro transit on the ownership of mobility instruments in Xi’an, China. Transp. Res. Part D: Transp. Environ. 2017, 52, 495–505. [Google Scholar] [CrossRef] [Green Version]
- Matas, A.; Raymond, J.-L.; Roig, J.-L. Car ownership and access to jobs in Spain. Transp. Res. Part A Policy Pract. 2009, 43, 607–617. [Google Scholar] [CrossRef] [Green Version]
- Tyrinopoulos, Y.; Antoniou, C. Factors affecting modal choice in urban mobility. Eur. Transp. Res. Rev. 2013, 5, 27–39. [Google Scholar] [CrossRef] [Green Version]
- Sabouri, S.; Brewer, S.; Ewing, R. Exploring the relationship between ride-sourcing services and vehicle ownership, using both inferential and machine learning approaches. Landsc. Urban Plan. 2020, 198, 103797. [Google Scholar] [CrossRef]
- Holtzclaw, J.; Clear, R.; Dittmar, H.; Goldstein, D.; Haas, P. Location efficiency: Neighborhood and socio-economic characteristics determine auto ownership and use-studies in Chicago, Los Angeles and San Francisco. Transp. Plan. Technol. 2002, 25, 1–27. [Google Scholar] [CrossRef]
- Shay, E.; Khattak, A.J. Household travel decision chains: Residential environment, automobile ownership, trips and mode choice. Int. J. Sustain. Transp. 2012, 6, 88–110. [Google Scholar] [CrossRef]
- Ding, C.; Cao, X.; Dong, M.; Zhang, Y.; Yang, J. Non-linear relationships between built environment characteristics and electric-bike ownership in Zhongshan, China. Transp. Res. Part D Transp. Environ. 2019, 75, 286–296. [Google Scholar] [CrossRef]
- Wang, X.; Yin, C.; Zhang, J.; Shao, C.; Wang, S. Nonlinear effects of residential and workplace built environment on car dependence. J. Transp. Geogr. 2021, 96, 103207. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, Y.; Cao, X.J.; Lu, D.; Chai, Y. Nonlinear effect of accessibility on car ownership in Beijing: Pedestrian-scale neighborhood planning. Transp. Res. Part D Transp. Environ. 2020, 86, 102445. [Google Scholar] [CrossRef]
- Bargegol, I.; Najafi Moghaddam Gilani, V.; Jamshidpour, F. Relationship between Pedestrians’ Speed, Density and Flow Rate of Crossings through Urban Intersections (Case Study: Rasht Metropolis) (RESEARCH NOTE). Int. J. Eng. 2017, 30, 1814–1821. [Google Scholar]
- Bargegol, I.; Amlashi, A.T.; Gilani, V.N.M. Estimation the Saturation Flow Rate at Far-side and Nearside Legs of Signalized Intersections—Case Study: Rasht City. Procedia Eng. 2016, 161, 226–234. [Google Scholar] [CrossRef] [Green Version]
- Zhao, T.H.; Khan, M.I.; Chu, Y.M. Artificial neural networking (ANN) analysis for heat and entropy generation in flow of non-Newtonian fluid between two rotating disks. Math. Methods Appl. Sci. 2021. Available online: https://onlinelibrary.wiley.com/doi/10.1002/mma.7310 (accessed on 1 January 2022). [CrossRef]
- Zhao, T.-H.; Shi, L.; Chu, Y.-M. Convexity and concavity of the modified Bessel functions of the first kind with respect to Hölder means. Rev. Real Acad. Cienc. Exactas Fís. Nat. Ser. A Matemáticas 2020, 114, 96. [Google Scholar] [CrossRef]
- Wang, M.-K.; Hong, M.-Y.; Xu, Y.-F.; Shen, Z.-H.; Chu, Y.-M. Inequalities for generalized trigonometric and hyperbolic functions with one parameter. J. Math. Inequal 2020, 14, 1–21. [Google Scholar] [CrossRef]
- Zha, T.-H.; Castillo, O.; Jahanshahi, H.; Yusuf, A.; Alassafi, M.O.; Alsaadi, F.E.; Chu, Y.-M. A fuzzy-based strategy to suppress the novel coronavirus (2019-NCOV) massive outbreak. Appl. Comput. Math. 2021, 20, 160–176. [Google Scholar]
- Zhao, T.-H.; Wang, M.-K.; Hai, G.-J.; Chu, Y.-M. Landen inequalities for Gaussian hypergeometric function. Rev. Real Acad. Cienc. Exactas Físicas Nat. Ser. A Matemáticas 2022, 116, 53. [Google Scholar] [CrossRef]
- Iqbal, M.A.; Wang, Y.; Miah, M.M.; Osman, M.S. Study on Date–Jimbo–Kashiwara–Miwa Equation with Conformable Derivative Dependent on Time Parameter to Find the Exact Dynamic Wave Solutions. Fractal Fract. 2022, 6, 4. [Google Scholar] [CrossRef]
- Zhao, T.-H.; Wang, M.-K.; Chu, Y.-M. Monotonicity and convexity involving generalized elliptic integral of the first kind. Rev. Real Acad. Cienc. Exactas Fís. Nat. Ser. A Matemáticas 2021, 115, 46. [Google Scholar] [CrossRef]
- Zhao, T.-H.; He, Z.-Y.; Chu, Y.-M. On some refinements for inequalities involving zero-balanced hypergeometric function. AIMS Math 2020, 5, 6479–6495. [Google Scholar] [CrossRef]
- Zhao, T.-H.; Wang, M.-K.; Chu, Y.-M. A sharp double inequality involving generalized complete elliptic integral of the first kind. AIMS Math 2020, 5, 4512–4528. [Google Scholar] [CrossRef]
- Song, Y.-Q.; Zhao, T.-H.; Chu, Y.-M.; Zhang, X.-H. Optimal evaluation of a Toader-type mean by power mean. J. Inequalities Appl. 2015, 2015, 408. [Google Scholar] [CrossRef] [Green Version]
- Conway, M.W.; Salon, D.; King, D.A. Trends in taxi use and the advent of ridehailing, 1995–2017: Evidence from the US National Household Travel Survey. Urban Sci. 2018, 2, 79. [Google Scholar] [CrossRef] [Green Version]
- Jiao, J.; Bischak, C.; Hyden, S. The impact of shared mobility on trip generation behavior in the US: Findings from the 2017 National Household Travel Survey. Travel Behav. Soc. 2020, 19, 1–7. [Google Scholar] [CrossRef]
- Das, V. Does Adoption of Ridehailing Result in More Frequent Sustainable Mobility Choices? An Investigation Based on the National Household Travel Survey (NHTS) 2017 Data. Smart Cities 2020, 3, 385–400. [Google Scholar] [CrossRef]
- Tribby, C.P.; Tharp, D.S. Examining urban and rural bicycling in the United States: Early findings from the 2017 National Household Travel Survey. J. Transp. Health 2019, 13, 143–149. [Google Scholar] [CrossRef]
- Porter, A.K.; Kontou, E.; McDonald, N.C.; Evenson, K.R. Perceived barriers to commuter and exercise bicycling in US adults: The 2017 National Household Travel Survey. J. Transp. Health 2020, 16, 100820. [Google Scholar] [CrossRef]
- Li, X.; Liu, C.; Jia, J. Ownership and usage analysis of alternative fuel vehicles in the United States with the 2017 national household travel survey data. Sustainability 2019, 11, 2262. [Google Scholar] [CrossRef] [Green Version]
- Jin, H.; Yu, J. Gender Responsiveness in Public Transit: Evidence from the 2017 US National Household Travel Survey. J. Urban Plan. Dev. 2021, 147, 04021021. [Google Scholar] [CrossRef]
- Godfrey, J.; Polzin, S.E.; Roessler, T. Public Transit in America: Observations from the 2017 National Household Travel Survey; Center for Urban Transportation Research: Tampa, FL, USA, 2019. [Google Scholar]
- Sadeghvaziri, E.; Tawfik, A. Using the 2017 National Household Travel Survey Data to Explore the Elderly’s Travel Patterns. In Proceedings of the International Conference on Transportation and Development, Seattle, WA, USA, 26–29 May 2020; pp. 86–94. [Google Scholar]
- Chen, T.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; ACM: New York, NY, USA, 2016; Volume 10, pp. 785–794. [Google Scholar]
- Hak Lee, E.; Kim, K.; Kho, S.-Y.; Kim, D.-K.; Cho, S.-H. Estimating Express Train Preference of Urban Railway Passengers Based on Extreme Gradient Boosting (XGBoost) using Smart Card Data. Transp. Res. Rec. 2021, 2675, 64–76. [Google Scholar] [CrossRef]
- Mahmoud, N.; Abdel-Aty, M.; Cai, Q.; Yuan, J. Predicting cycle-level traffic movements at signalized intersections using machine learning models. Transp. Res. Part C Emerg. Technol. 2021, 124, 102930. [Google Scholar] [CrossRef]
- Cai, Q.; Abdel-Aty, M.; Zheng, O.; Wu, Y. Applying machine learning and google street view to explore effects of drivers’ visual environment on traffic safety. Transp. Res. Part C Emerg. Technol. 2022, 135, 103541. [Google Scholar] [CrossRef]
- Kaur, H.; Kumar, M. Offline handwritten Gurumukhi word recognition using eXtreme Gradient Boosting methodology. Soft Comput. 2021, 25, 4451–4464. [Google Scholar] [CrossRef]
- Ding, C.; Cao, X.J.; Næss, P. Applying gradient boosting decision trees to examine non-linear effects of the built environment on driving distance in Oslo. Transp. Res. Part A Policy Pract. 2018, 110, 107–117. [Google Scholar] [CrossRef]
- Transportation Secure Data Center. 2017 National Household Travel Survey—California; National Household Travel Survey: Sacramento, CA, USA, 2019. [Google Scholar]
- United States Census Bureau. Most Populous. 2017. Available online: https://www.census.gov/topics/population.html/ (accessed on 2 January 2022).
- Potoglou, D.; Kanaroglou, P.S. Modelling car ownership in urban areas: A case study of Hamilton, Canada. J. Transp. Geogr. 2008, 16, 42–54. [Google Scholar] [CrossRef]
- Kim, H.S.; Kim, E. Effects of Public Transit on Automobile Ownership and Use in Households of the USA. In Review of Urban & Regional Development Studies: Journal of the Applied Regional Science Conference; Blackwell Publishing: Oxford, UK; Boston, MA, USA, 2004. [Google Scholar]
- Chu, Y.-L. Automobile Ownership Analysis Using Ordered Probit Models. Transp. Res. Rec. 2002, 1805, 60–67. [Google Scholar] [CrossRef]
- Brownstone, D.; Golob, T.F. The impact of residential density on vehicle usage and energy consumption. J. Urban Econ. 2009, 65, 91–98. [Google Scholar] [CrossRef] [Green Version]
- Shao, Q.; Zhang, W.; Cao, X.J.; Yang, J. Nonlinear and interaction effects of land use and motorcycles/E-bikes on car ownership. Transp. Res. Part D Transp. Environ. 2022, 102, 103115. [Google Scholar] [CrossRef]
- Liu, F.; Zhao, F.; Liu, Z.; Hao, H. The Impact of Purchase Restriction Policy on Car Ownership in China’s Four Major Cities. J. Adv. Transp. 2020, 2020, 7454307. [Google Scholar] [CrossRef]
- Aghaabbasi, M.; Moeinaddini, M.; Shah, M.Z.; Asadi-Shekari, Z. A new assessment model to evaluate the microscale sidewalk design factors at the neighbourhood level. J. Transp. Health 2017, 5, 97–112. [Google Scholar] [CrossRef]
- Buehler, R. Determinants of bicycle commuting in the Washington, DC region: The role of bicycle parking, cyclist showers, and free car parking at work. Transp. Res. Part D Transp. Environ. 2012, 17, 525–531. [Google Scholar] [CrossRef]
- Piatkowski, D.P.; Marshall, W.E. Not all prospective bicyclists are created equal: The role of attitudes, socio-demographics, and the built environment in bicycle commuting. Travel Behav. Soc. 2015, 2, 166–173. [Google Scholar] [CrossRef]
- Verma, A.; Vajjarapu, H.; Thuluthiyil Manoj, M. Planning and Usage Analysis of Bike Sharing System in a University Campus. In Proceedings of the Recent Advances in Traffic Engineering, Singapore, 29 August 2020; pp. 339–349. [Google Scholar]
- Torcat, A.; McCray, T.; Durden, T. Changing Perceptions of Cycling in the African American Community to Encourage Participation in a Sport that Promotes Health in Adults; Southwest Region University Transportation Center (US): College Station, TX, USA, 2015. [Google Scholar]
- The League of American Bicyclists. Bicycle-Friendly. Available online: https://rosap.ntl.bts.gov/view/dot/29321 (accessed on 3 January 2022).
- Kumar, R.; Khan, A.A.; Kumar, J.; Zakria; Golilarz, N.A.; Zhang, S.; Ting, Y.; Zheng, C.; Wang, W. Blockchain-Federated-Learning and Deep Learning Models for COVID-19 Detection Using CT Imaging. IEEE Sens. J. 2021, 21, 16301–16314. [Google Scholar] [CrossRef]
- Golilarz, N.A.; Mirmozaffari, M.; Gashteroodkhani, T.A.; Ali, L.; Dolatsara, H.A.; Boskabadi, A.; Yazdi, M. Optimized Wavelet-Based Satellite Image De-Noising With Multi-Population Differential Evolution-Assisted Harris Hawks Optimization Algorithm. IEEE Access 2020, 8, 133076–133085. [Google Scholar] [CrossRef]
- Golilarz, N.A.; Addeh, A.; Gao, H.; Ali, L.; Roshandeh, A.M.; Munir, H.M.; Khan, R.U. A New Automatic Method for Control Chart Patterns Recognition Based on ConvNet and Harris Hawks Meta Heuristic Optimization Algorithm. IEEE Access 2019, 7, 149398–149405. [Google Scholar] [CrossRef]
- Najafi Moghaddam Gilani, V.; Hosseinian, S.M.; Ghasedi, M.; Nikookar, M. Data-Driven Urban Traffic Accident Analysis and Prediction Using Logit and Machine Learning-Based Pattern Recognition Models. Math. Probl. Eng. 2021, 2021, 9974219. [Google Scholar] [CrossRef]
- Gilani, V.N.M.; Hosseinian, S.M.; Hamedi, G.H.; Safari, D. Presentation of predictive models for two-objective optimization of moisture and fatigue damages caused by deicers in asphalt mixtures. J. Test. Eval. 2021, 49, 1–22. [Google Scholar]
- Tao, W.; Aghaabbasi, M.; Ali, M.; Almaliki, A.H.; Zainol, R.; Almaliki, A.A.; Hussein, E.E. An Advanced Machine Learning Approach to Predicting Pedestrian Fatality Caused by Road Crashes: A Step toward Sustainable Pedestrian Safety. Sustainability 2022, 14, 2436. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Study Aim | Variables Used | Analysis Technique(s) |
|---|---|---|---|
| Conway, Salon, and King [41] | To report on taxi usage patterns and the rise of ride-hailing services. | Sociodemographic, personal trips | Descriptive analysis, logistic regression |
| Godfrey et al. [48] | To address some of the most pressing concerns affecting public transit. | Sociodemographic | Descriptive analysis |
| Li, Liu, and Jia [46] | To look at the current state of conventional car ownership and usage, as well as renewable fuels vehicle ownership and consumption. | Sociodemographic | Descriptive analysis |
| Tribby and Tharp [44] | To determine the prevalence of cycling patterns by city, as well as the features that best distinguish cyclists from non-cyclists. | Sociodemographic | Logistic regression |
| Das [43] | To determine the impact of ride hailing service uptake on sustainable mobility options. | Sociodemographic, built environment attributes | Logistic regression |
| Jiao, Bischak, and Hyden [42] | To determine the effect of shared mobility on trip production. | Sociodemographic, built environment attributes | Negative binomial (NB) model |
| Porter, Kontou, McDonald, and Evenson [45] | To describe the overall impediments to riding as self-reported. | Sociodemographic | Descriptive analysis |
| Sadeghvaziri and Tawfik [49] | To learn more about how the elderly travel. | Sociodemographic | Descriptive analysis |
| Jin and Yu [47] | To gain a better understanding of the fundamental reasons why people avoid taking public transportation by looking at the viewpoints of various users. | Sociodemographic, descriptive analysis | |
| Sabouri, Tian, Ewing, Park, and Greene [5] | Using regional household travel data and constructed environmental characteristics from 32 regions across the United States, vehicle ownership models were assessed. | Sociodemographic, built environment attributes | Logistic regression |
| Variable | Description | Value |
|---|---|---|
| Independent variable | ||
| HHVEHCNT | Household vehicles’ count | [0–12] |
| Sociodemographic (SD) | ||
| HHFAMINC | Household income ($) | (1) <10,000; (2) 10,000–14,999; (3) 15,000–24,999; (4) 25,000–34,999; (5) 35,000–49,999; (6) 50,000–74,999; (7) 75,000–99,999; (8) 100,000–124,999; (9) 125,000–149,999; (10) 150,000–199,999; (11) >200,000 |
| HHSIZE | Household members’ count | [1–13] |
| HOMEOWN | Home ownership | (1) own; (2) rent |
| NUMADLT | Count of adults in the household over the age of 18 | [1–10] |
| WRKCOUNT | Household workers’ count | [1–7] |
| YOUNGCHILD | Count of children aged 0 to 4 in the household | [1–5] |
| Household travel characteristics (HTC) | ||
| DRVRCNT | Household drivers’ count | [0–9] |
| TRPHHACC | Household members’ count on the trip | [0–10] |
| TRPHHVEH | Household vehicle used on trip | (1) yes; (2) no |
| Built environment attributes (BEA) | ||
| BIKEINFRA | Deficiencies in cycling infrastructure * | (1) no adjacent paths or trails; (2) no sidewalks or sidewalks are in poor condition; (3) no adjacent parks; (4) 1 and 2; (5) 1 and 3; (6) 2 and 3; (7) 1, 2, and 3 |
| HBPPOPDN | Category of population density (persons per sqmi) in the household’s home census block group | 50 = 0–99; 300 = 100–499; 750 = 500–999; 1500 = 1000–1999; 3000 = 2000–3999; 7000 = 4000–9999; 17,000 = 10,000–24,999; 30,000 = 25,000–999,999 |
| URBANSIZE | Size of the urban area in which the residence is located | (1) 50,000–199,999; (2) 200,000–499,999; (3) 500,000–999,999; (4) 1 million or more without heavy rail; (5) 1 million or more with heavy rail; (6) not in urbanized area |
| URBRUR | Household in urban/rural area | (1) urban; (2) rural |
| WALKIFRA | Deficiencies in walking infrastructure * | (1) no adjacent paths or trails; (2) no sidewalks or sidewalks are in poor condition; (3) no adjacent parks; (4) 1 and 2; (5) 1 and 3; (6) 2 and 3; (7) 1, 2, and 3 |
| Parameter | CA | MO | KS |
|---|---|---|---|
| Number of trees | 1 | 70 | 80 |
| Maximal depth | 10 | 80 | 60 |
| Minimum rows | 4.9 × 10−324 | 4.9 × 10−324 | 4.9 × 10−324 |
| Criterion | CA | MO | KS | |
|---|---|---|---|---|
| R | Train | 0.814 | 0.934 | 0.995 |
| Test | 0.817 | 0.935 | 0.965 | |
| MAE | Train | 0.664 | 0.303 | 0.246 |
| Test | 0.662 | 0.308 | 0.244 | |
| State | Cumulative Importance | ||
|---|---|---|---|
| Sociodemographic (SD) | Built Environment Attributes (BEA) | Household Travel Characteristics (HTC) | |
| CA | 0.08 | 0.30 | 0.62 |
| MO | 0.53 | 0.12 | 0.35 |
| KS | 0.55 | 0.20 | 0.25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, T.; Aghaabbasi, M.; Ali, M.; Zainol, R.; Jan, A.; Mohamed, A.M.; Mohamed, A. Nonlinear Relationships between Vehicle Ownership and Household Travel Characteristics and Built Environment Attributes in the US Using the XGBT Algorithm. Sustainability 2022, 14, 3395. https://doi.org/10.3390/su14063395
Ma T, Aghaabbasi M, Ali M, Zainol R, Jan A, Mohamed AM, Mohamed A. Nonlinear Relationships between Vehicle Ownership and Household Travel Characteristics and Built Environment Attributes in the US Using the XGBT Algorithm. Sustainability. 2022; 14(6):3395. https://doi.org/10.3390/su14063395
Chicago/Turabian StyleMa, Te, Mahdi Aghaabbasi, Mujahid Ali, Rosilawati Zainol, Amin Jan, Abdeliazim Mustafa Mohamed, and Abdullah Mohamed. 2022. "Nonlinear Relationships between Vehicle Ownership and Household Travel Characteristics and Built Environment Attributes in the US Using the XGBT Algorithm" Sustainability 14, no. 6: 3395. https://doi.org/10.3390/su14063395
APA StyleMa, T., Aghaabbasi, M., Ali, M., Zainol, R., Jan, A., Mohamed, A. M., & Mohamed, A. (2022). Nonlinear Relationships between Vehicle Ownership and Household Travel Characteristics and Built Environment Attributes in the US Using the XGBT Algorithm. Sustainability, 14(6), 3395. https://doi.org/10.3390/su14063395