
Study on the Extraction Method of Sub-Network for Optimal Operation of Connected and Automated Vehicle-Based Mobility Service and Its Implication




Abstract
:1. Introduction
2. Methodology
2.1. Sub-Network Extraction Method
2.1.1. Link Performance Evaluation Method
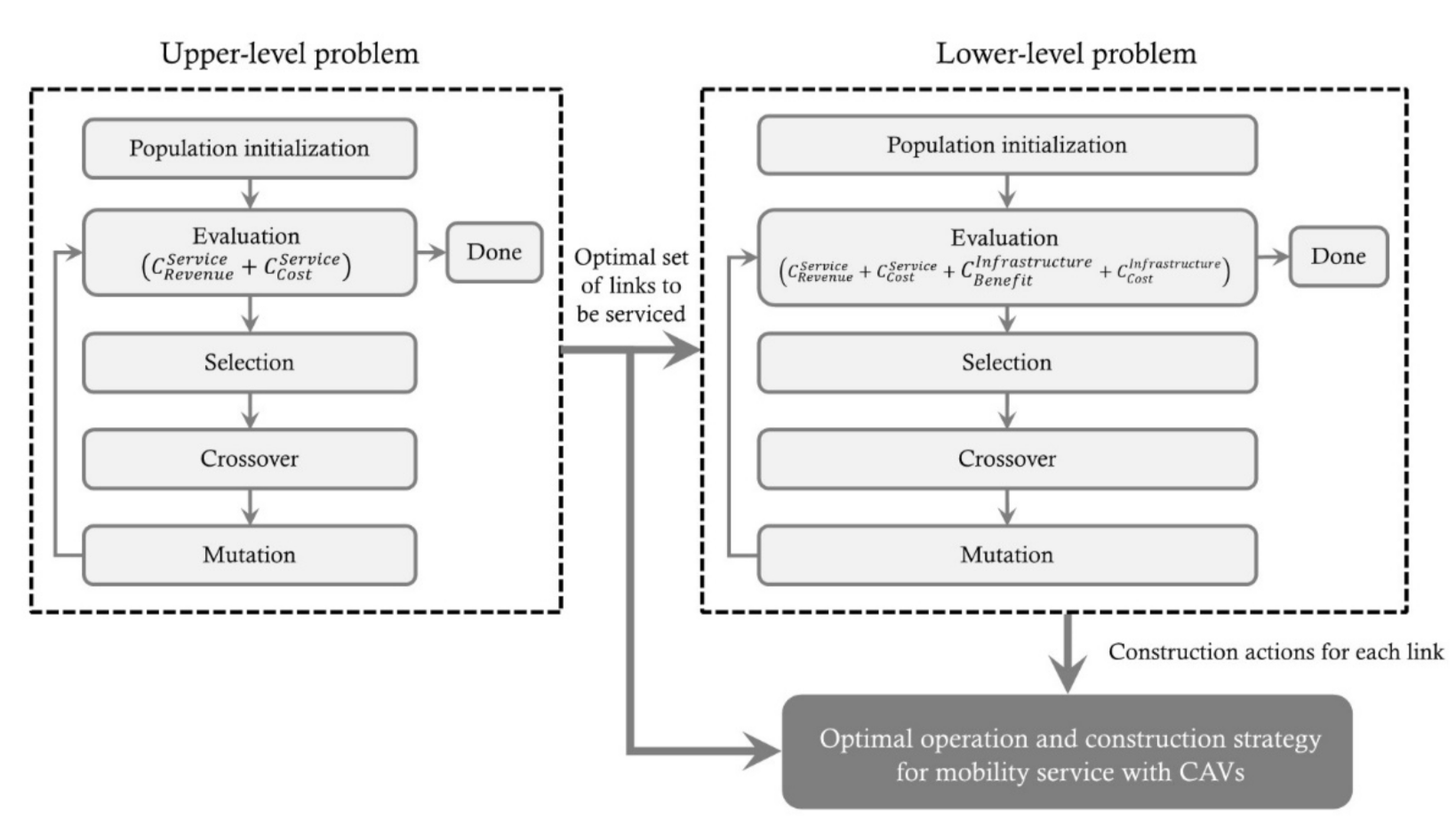
2.1.2. Optimization with Genetic Algorithm
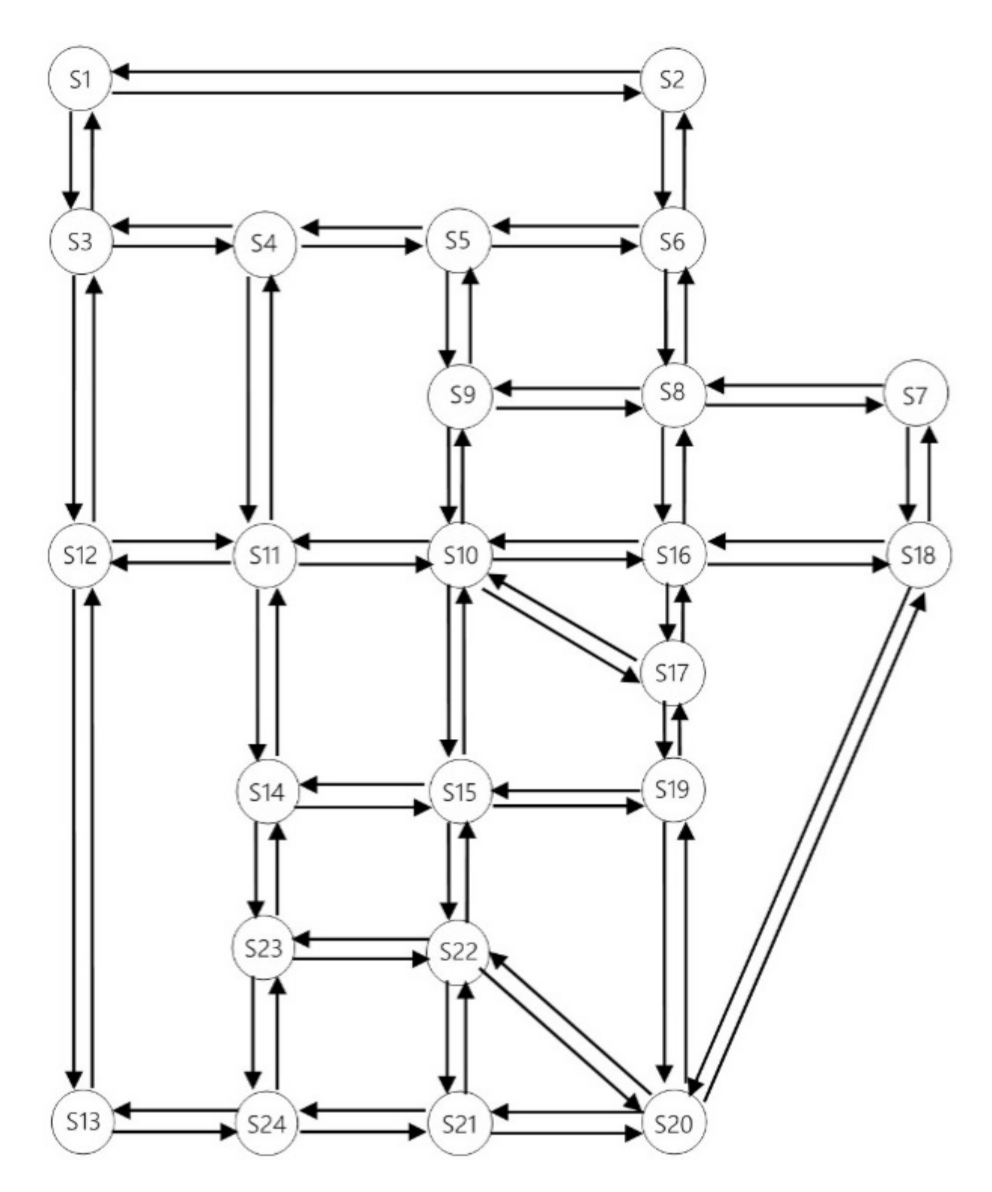
2.2. Network and Scenario
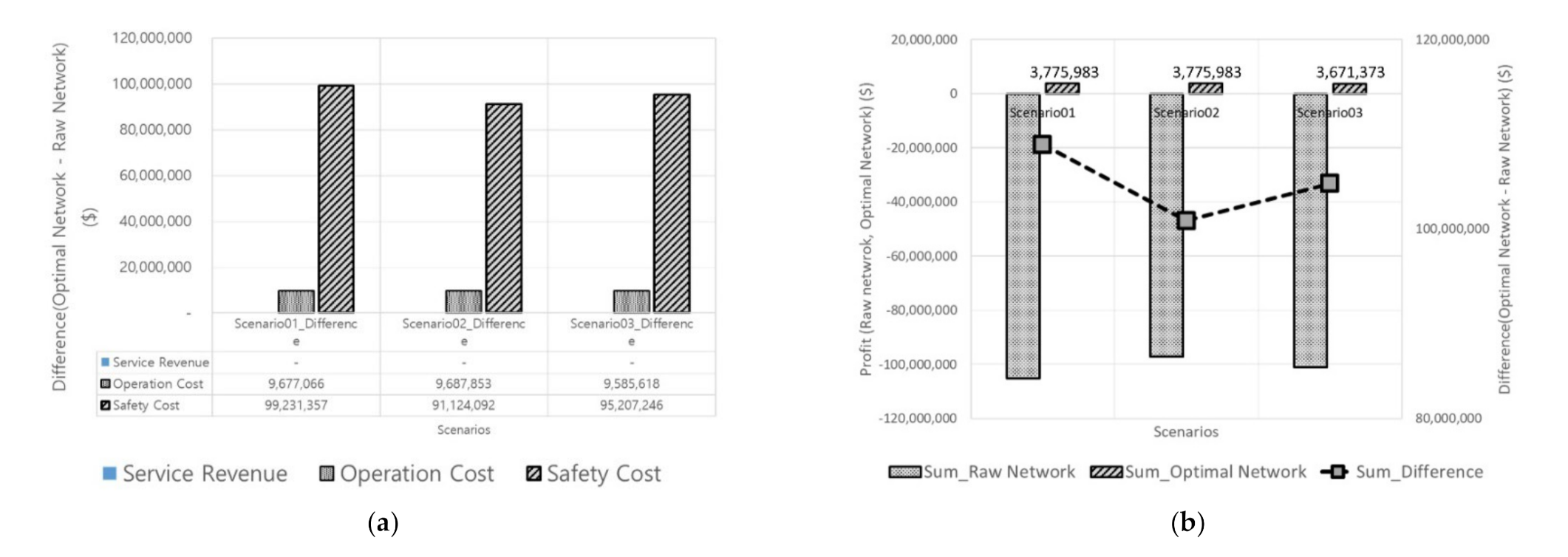
3. Results
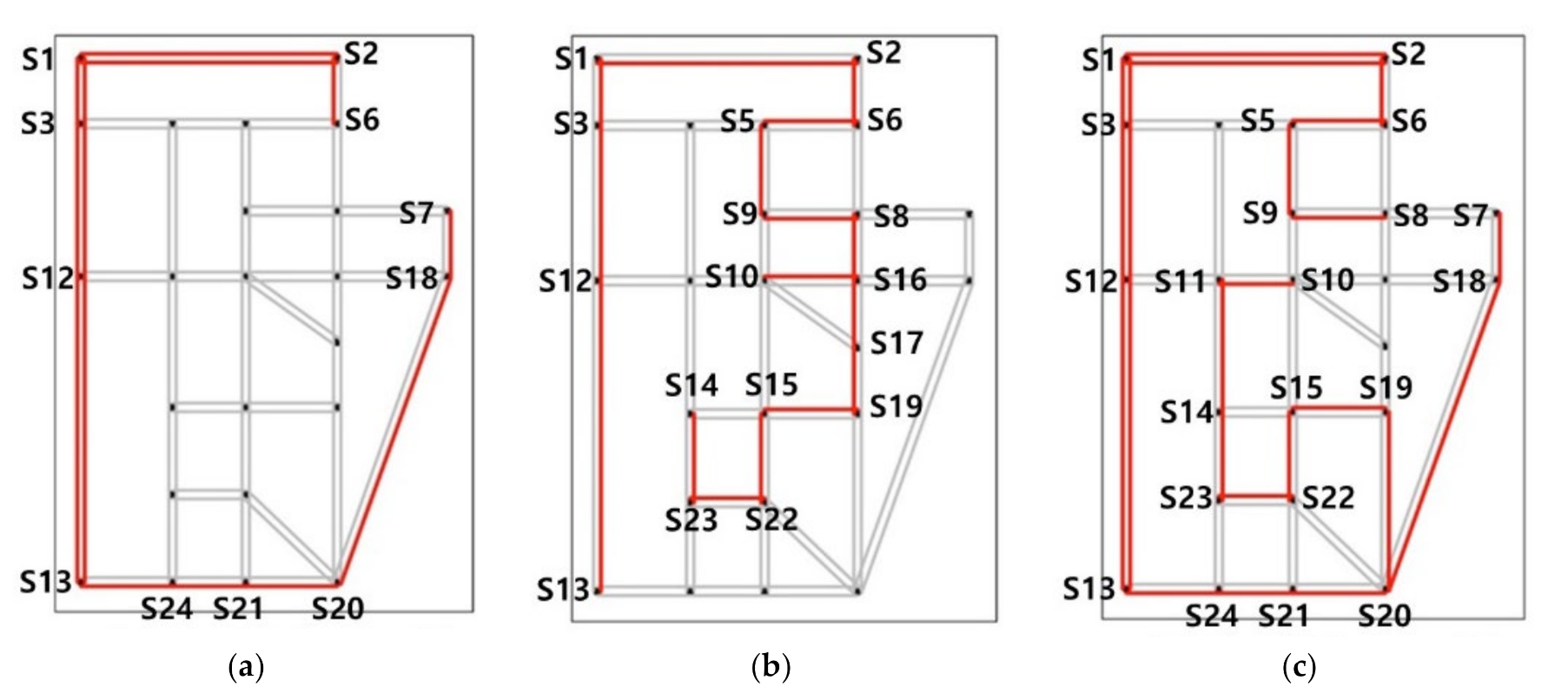
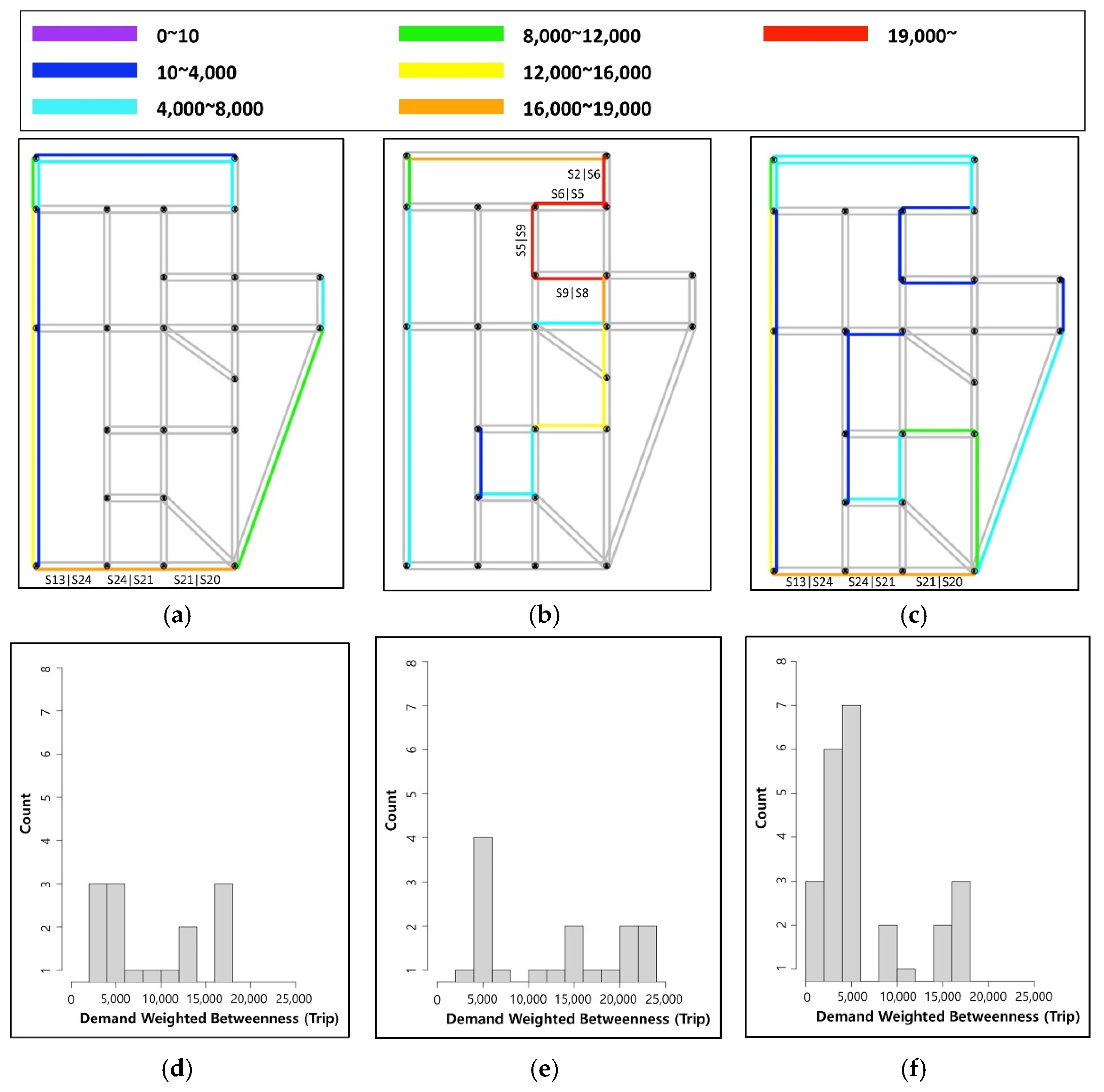
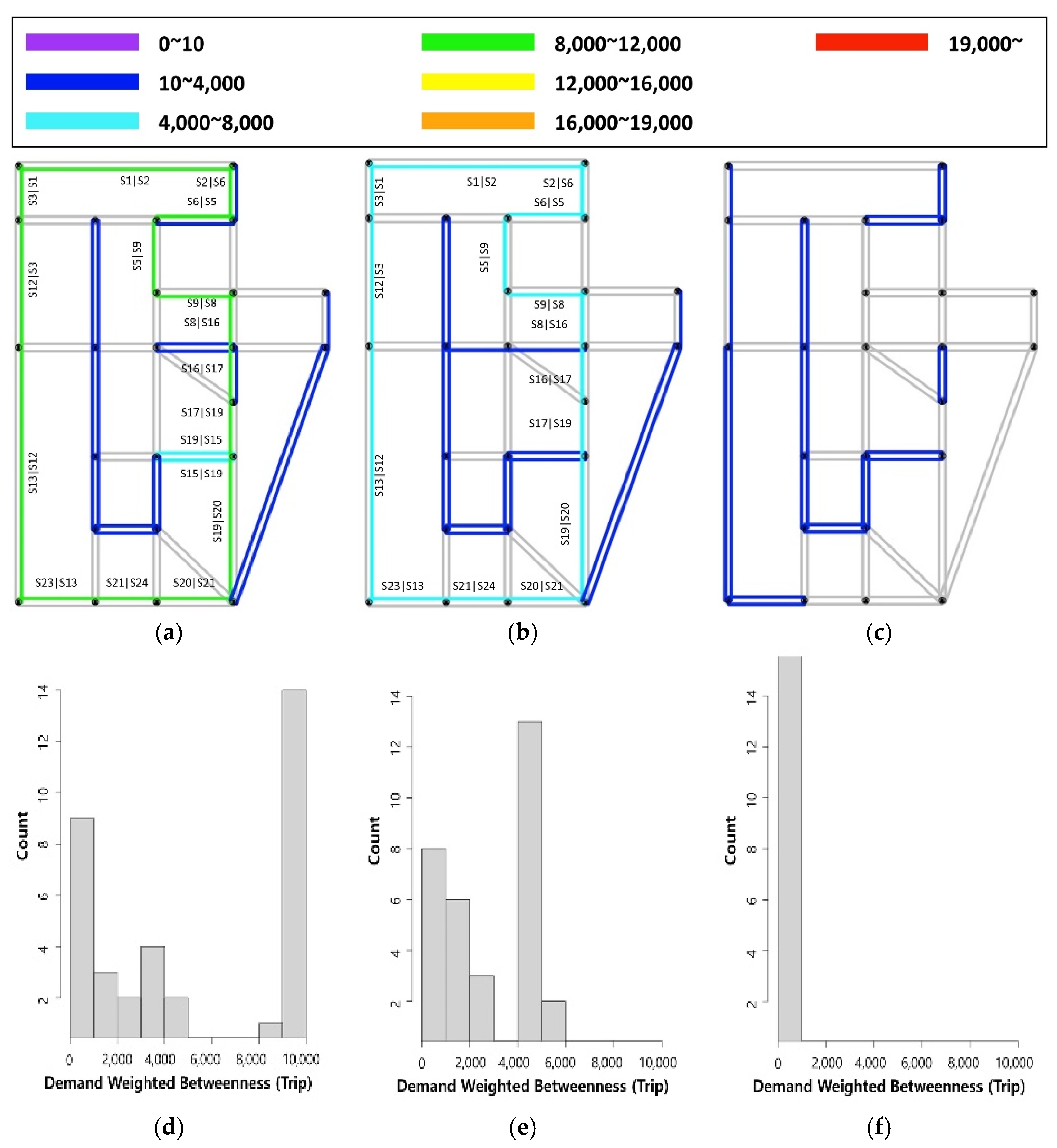
3.1. Service Network Analysis Varying Demand Patterns
3.1.1. Optimal Sub-Network without Construction of Smart Infrastructure
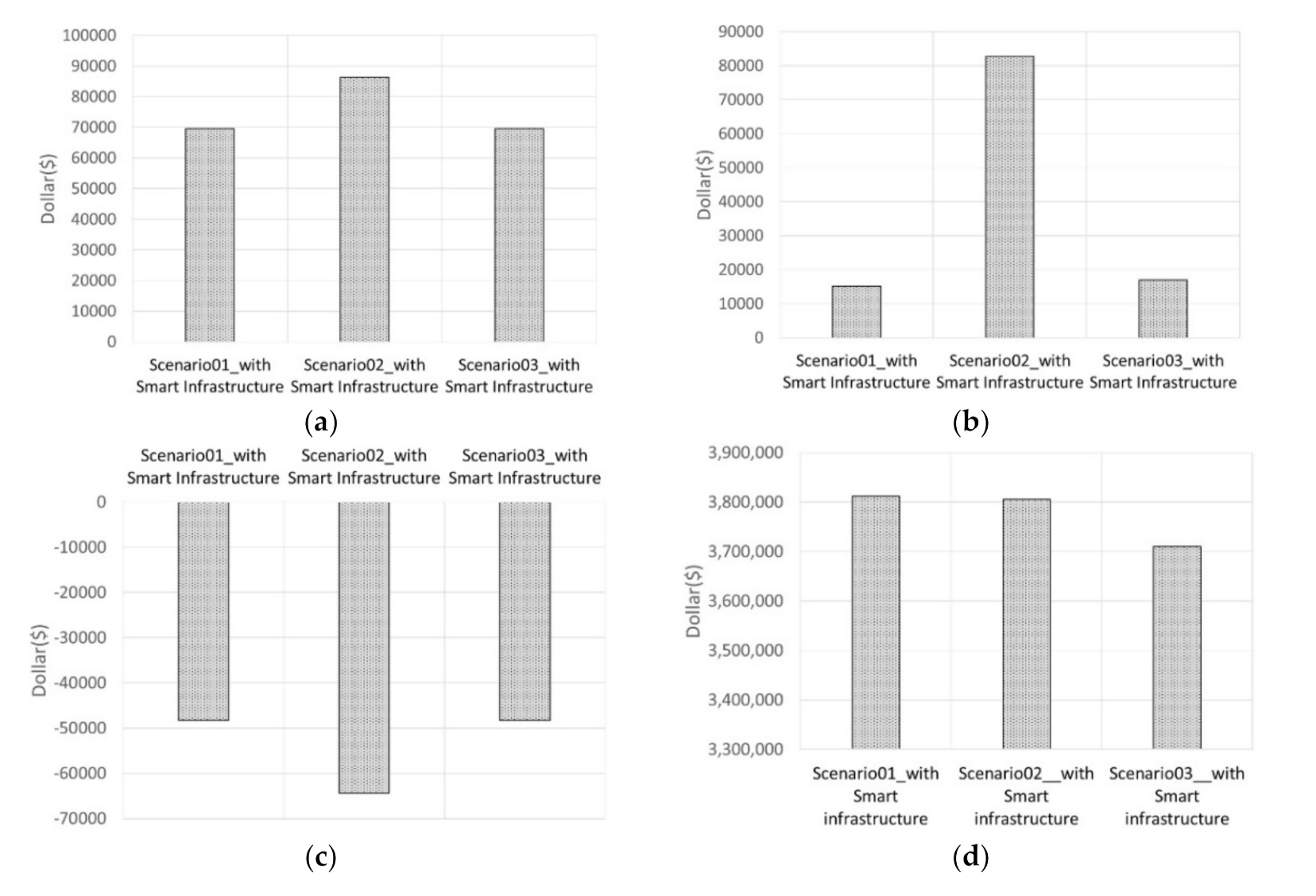
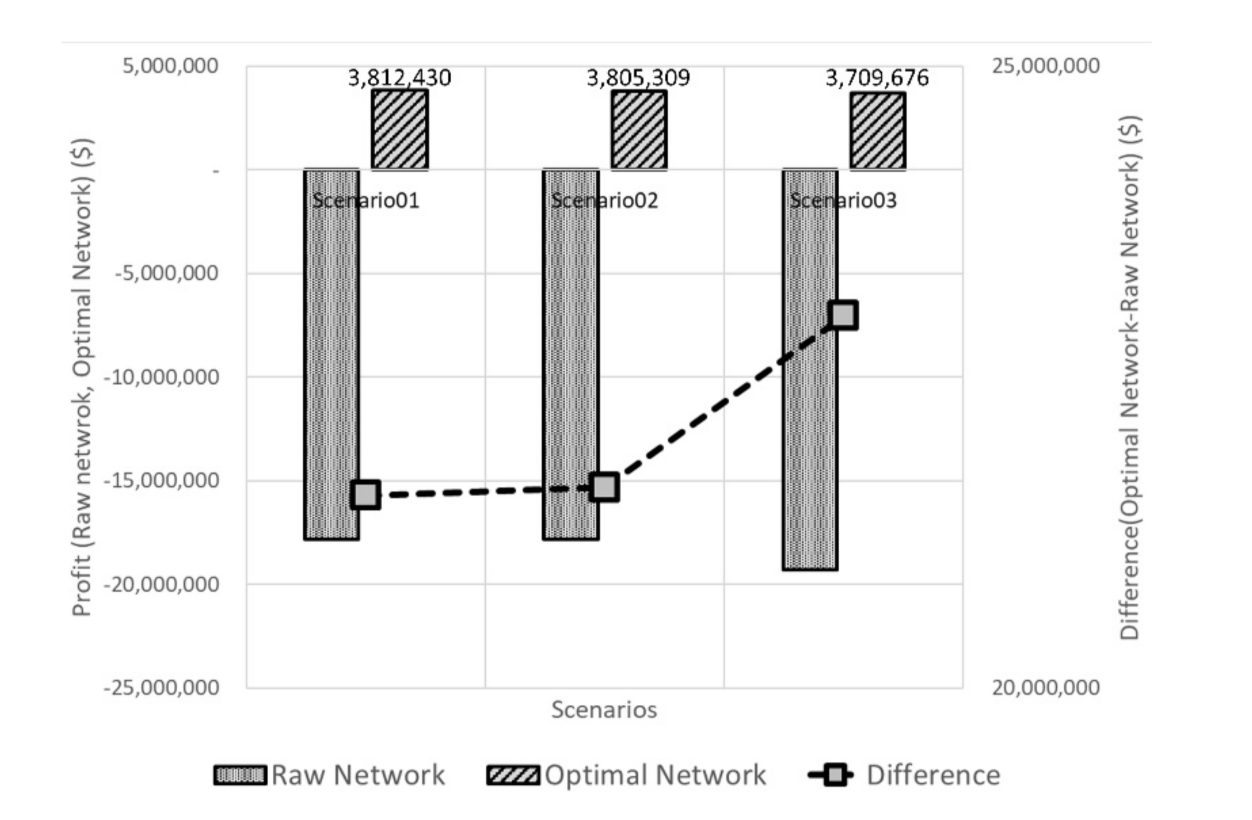
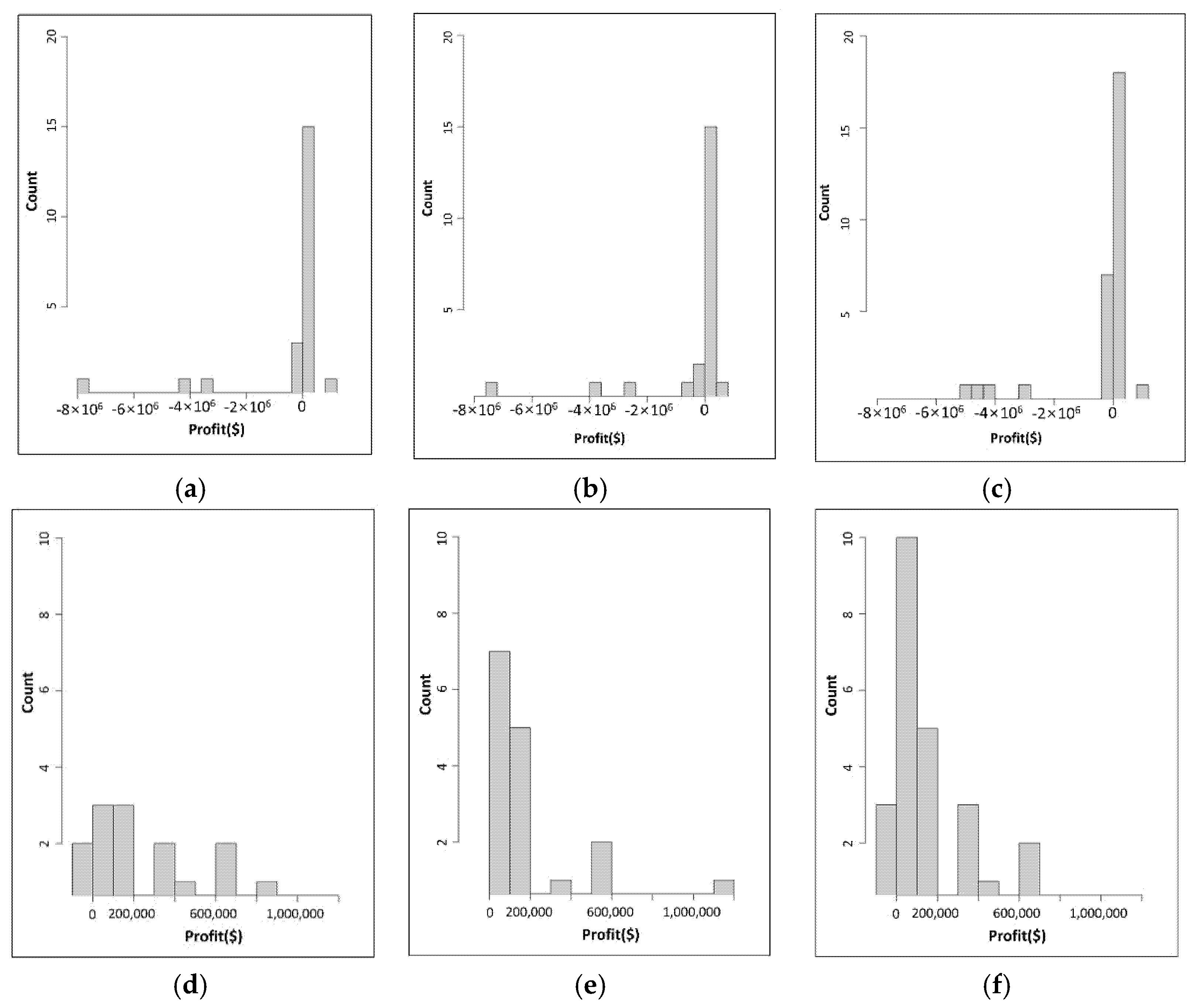
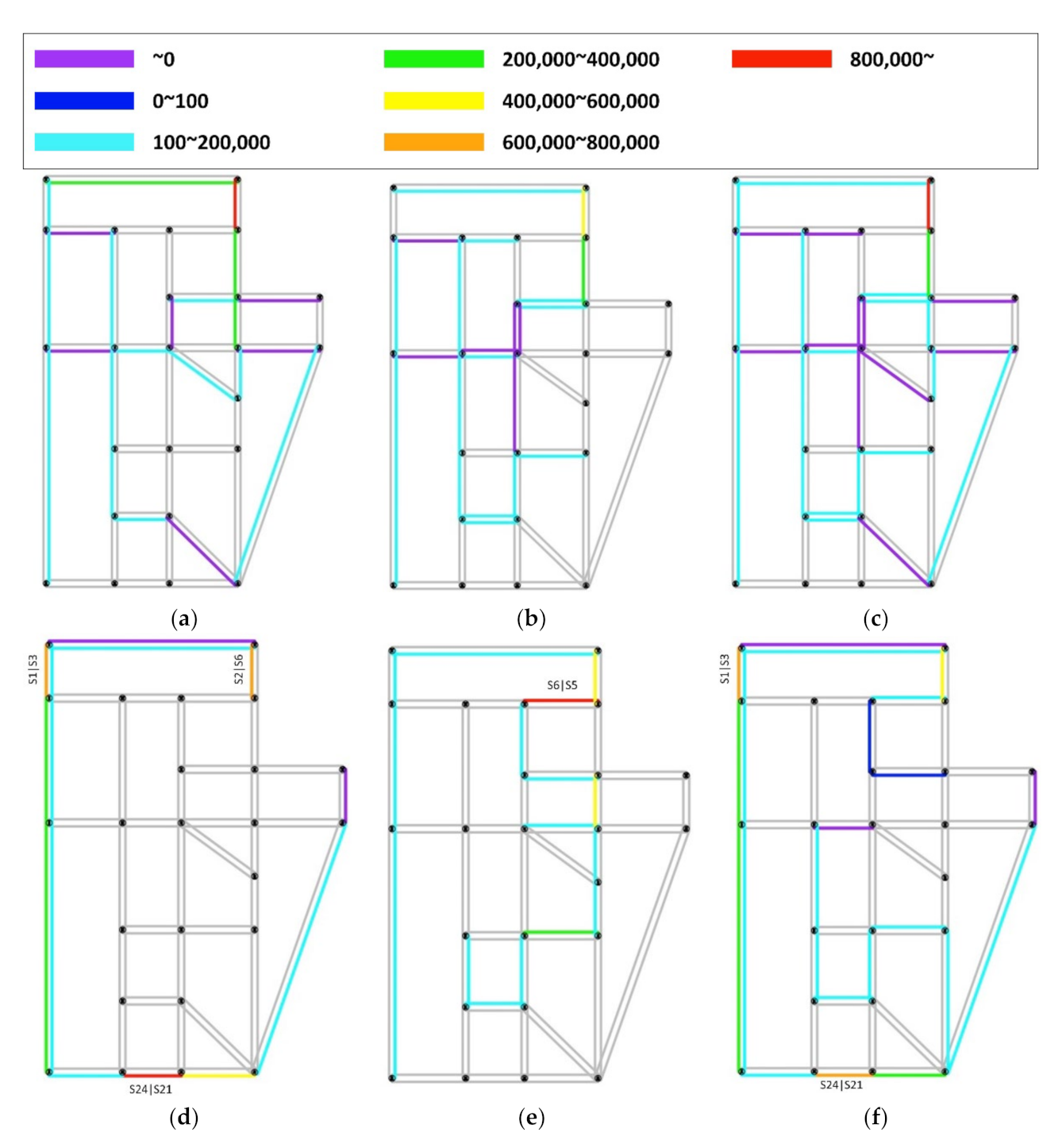
3.1.2. Optimal Sub-Network with Construction of Smart Infrastructure
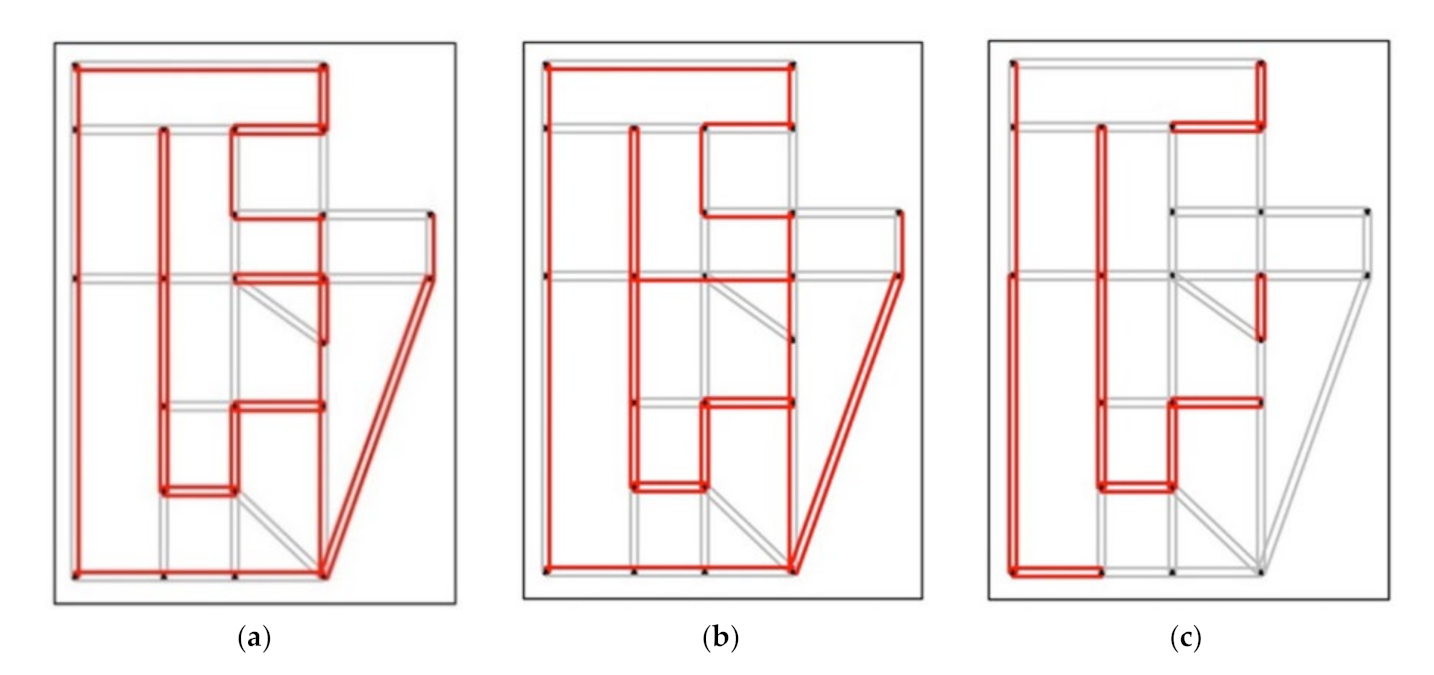
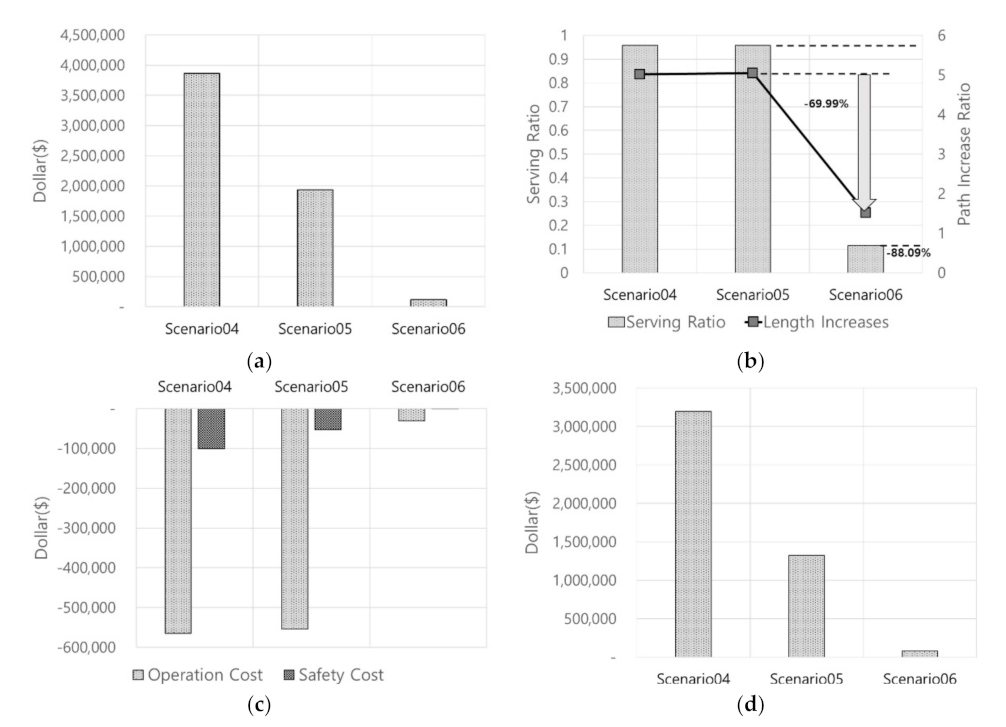
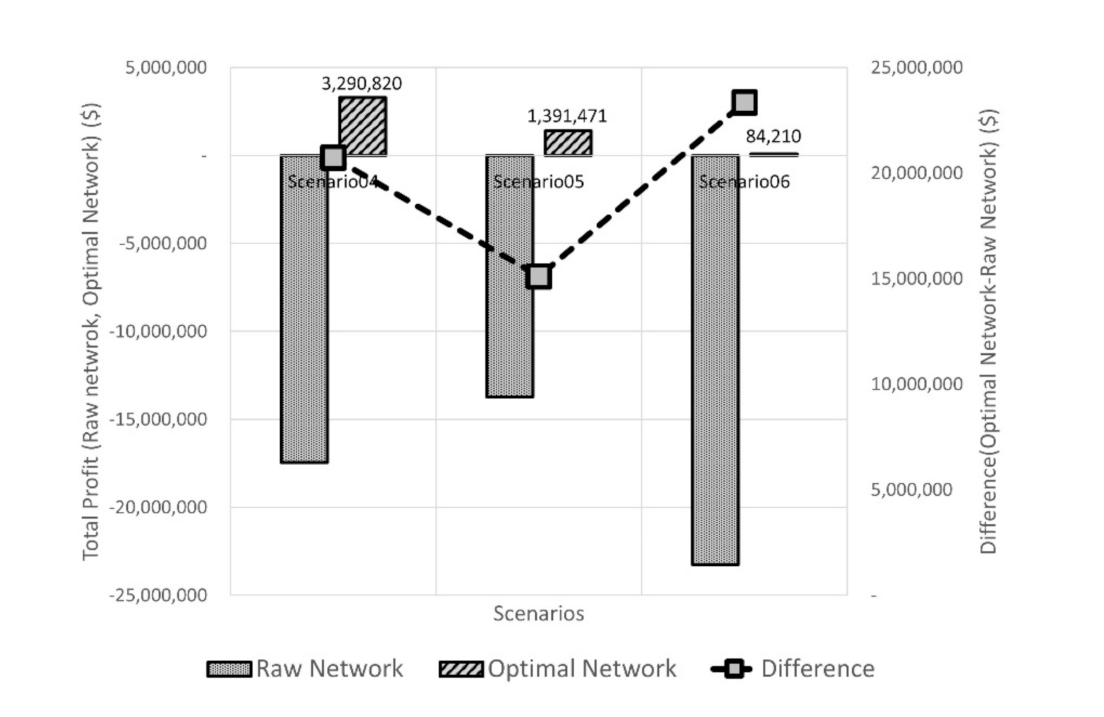
3.2. Service Network Analysis Varying Demand Size
3.2.1. Optimal Sub-Network without Construction of Smart Infrastructure
3.2.2. Optimal Sub-Network with Construction of Smart Infrastructure
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| From Node | To Node | Length | Operation and Safety Level | Infrastructure Level (before) | From Node | To Node | Length | Operation and Safety Level | Infrastructure Level (before) |
|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | 0.4 | 3 | 0 | S13 | S24 | 0.9 | 1 | 0 |
| S1 | S3 | 0.3 | 1 | 0 | S14 | S11 | 0.3 | 1 | 0 |
| S2 | S1 | 1 | 2 | 0 | S14 | S15 | 0.5 | 2 | 0 |
| S2 | S6 | 0.2 | 1 | 0 | S14 | S23 | 2.9 | 1 | 0 |
| S3 | S1 | 3.2 | 1 | 0 | S15 | S10 | 0.6 | 4 | 0 |
| S3 | S4 | 0.2 | 3 | 0 | S15 | S14 | 0.5 | 2 | 0 |
| S3 | S12 | 0.1 | 2 | 0 | S15 | S19 | 1.2 | 1 | 0 |
| S4 | S3 | 0.4 | 4 | 0 | S15 | S22 | 1.3 | 1 | 0 |
| S4 | S5 | 0.4 | 4 | 0 | S16 | S8 | 1.2 | 2 | 0 |
| S4 | S11 | 0.2 | 1 | 0 | S16 | S10 | 1.6 | 2 | 0 |
| S5 | S4 | 1.7 | 3 | 0 | S16 | S17 | 0.2 | 1 | 0 |
| S5 | S6 | 1.7 | 1 | 0 | S16 | S18 | 0.6 | 5 | 0 |
| S5 | S9 | 3.2 | 2 | 0 | S17 | S10 | 0.6 | 3 | 0 |
| S6 | S2 | 1.7 | 1 | 0 | S17 | S16 | 0.2 | 1 | 0 |
| S6 | S5 | 0.3 | 1 | 0 | S17 | S19 | 1.5 | 2 | 0 |
| S6 | S8 | 0.9 | 2 | 0 | S18 | S7 | 2.9 | 3 | 0 |
| S7 | S8 | 0.5 | 4 | 0 | S18 | S16 | 0.6 | 5 | 0 |
| S7 | S18 | 0.2 | 2 | 0 | S18 | S20 | 0.3 | 2 | 0 |
| S8 | S6 | 1.7 | 3 | 0 | S19 | S15 | 1 | 1 | 0 |
| S8 | S7 | 3.2 | 3 | 0 | S19 | S17 | 0.7 | 3 | 0 |
| S8 | S9 | 0.3 | 2 | 0 | S19 | S20 | 0.9 | 2 | 0 |
| S8 | S16 | 1.1 | 2 | 0 | S20 | S18 | 0.5 | 2 | 0 |
| S9 | S5 | 0.3 | 2 | 0 | S20 | S19 | 2.9 | 2 | 0 |
| S9 | S8 | 0.2 | 2 | 0 | S20 | S21 | 0.9 | 2 | 0 |
| S9 | S10 | 0.5 | 5 | 0 | S20 | S22 | 1.6 | 3 | 0 |
| S10 | S9 | 0.5 | 5 | 0 | S21 | S20 | 0.3 | 2 | 0 |
| S10 | S11 | 0.2 | 3 | 0 | S21 | S22 | 0.5 | 3 | 0 |
| S10 | S15 | 3.2 | 3 | 0 | S21 | S24 | 1.6 | 2 | 0 |
| S10 | S16 | 1.3 | 2 | 0 | S22 | S15 | 0.4 | 1 | 0 |
| S10 | S17 | 0.5 | 2 | 0 | S22 | S20 | 0.7 | 4 | 0 |
| S11 | S4 | 0.2 | 1 | 0 | S22 | S21 | 0.5 | 4 | 0 |
| S11 | S10 | 0.6 | 4 | 0 | S22 | S23 | 0.3 | 1 | 0 |
| S11 | S12 | 0.6 | 5 | 0 | S23 | S14 | 0.7 | 1 | 0 |
| S11 | S14 | 0.3 | 1 | 0 | S23 | S22 | 0.3 | 1 | 0 |
| S12 | S3 | 1.1 | 2 | 0 | S23 | S24 | 1.2 | 3 | 0 |
| S12 | S11 | 0.6 | 5 | 0 | S24 | S13 | 0.3 | 1 | 0 |
| S12 | S13 | 0.3 | 1 | 0 | S24 | S21 | 0.4 | 2 | 0 |
| S13 | S12 | 1.9 | 1 | 0 | S24 | S23 | 0.4 | 4 | 0 |
References
- Beza, A.D.; Zefreh, M.M. Potential Effects of Automated Vehicles on Road Transportation: A Literature Review. Transp. Telecommun. J. 2019, 20, 269–278. [Google Scholar] [CrossRef] [Green Version]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the Safety Impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Evaluating the impact of connected and autonomous vehicles on traffic safety. Phys. A Stat. Mech. Appl. 2019, 526, 121009. [Google Scholar] [CrossRef]
- Yu, H.; Tak, S.; Park, M.; Yeo, H. Impact of Autonomous-Vehicle-Only Lanes in Mixed Traffic Conditions. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 430–439. [Google Scholar] [CrossRef]
- Lu, Q.; Tettamanti, T.; Hörcher, D.; Varga, I. The impact of autonomous vehicles on urban traffic network capacity: An experimental analysis by microscopic traffic simulation. Transp. Lett. 2020, 12, 540–549. [Google Scholar] [CrossRef] [Green Version]
- Spence, J.C.; Kim, Y.-B.; Lamboglia, C.G.; Lindeman, C.; Mangan, A.J.; McCurdy, A.P.; Stearns, J.A.; Wohlers, B.; Sivak, A.; Clark, M.I. Potential Impact of Autonomous Vehicles on Movement Behavior: A Scoping Review. Am. J. Prev. Med. 2020, 58, e191–e199. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. National Motor Vehicle Crash Causation Survey: Report to Congress; CreateSpace Independent Publishing Platform: Seattle, WA, USA, 2008. [Google Scholar]
- Ioannou, P.A.; Chien, C.C. Autonomous intelligent cruise control. IEEE Trans. Veh. Technol. 1993, 42, 657–672. [Google Scholar] [CrossRef] [Green Version]
- Davis, L.C. Effect of adaptive cruise control systems on traffic flow. Phys. Rev. E 2004, 69, 8. [Google Scholar] [CrossRef]
- Marsden, G.; McDonald, M.; Brackstone, M. Towards an understanding of adaptive cruise control. Transp. Res. Part C Emerg. Technol. 2001, 9, 33–51. [Google Scholar] [CrossRef]
- van Arem, B.; van Driel, C.J.G.; Visser, R. The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Kesting, A.; Treiber, M.; Schönhof, M.; Helbing, D. Adaptive cruise control design for active congestion avoidance. Transp. Res. Part C Emerg. Technol. 2008, 16, 668–683. [Google Scholar] [CrossRef]
- Shladover, S.E.; Su, D.; Lu, X.-Y. Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transp. Res. Rec. J. Transp. Res. Board 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Kerner, B.S. Failure of classical traffic flow theories: Stochastic highway capacity and automatic driving. Phys. A Stat. Mech. Its Appl. 2016, 450, 700–747. [Google Scholar] [CrossRef] [Green Version]
- Calvert, S.C.; Schakel, W.J.; van Lint, J.W.C. Will Automated Vehicles Negatively Impact Traffic Flow? J. Adv. Transp. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Fakhrmoosavi, F.; Saedi, R.; Zockaie, A.; Talebpour, A. Impacts of Connected and Autonomous Vehicles on Traffic Flow with Heterogeneous Drivers Spatially Distributed over Large-Scale Networks. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 817–830. [Google Scholar] [CrossRef]
- Tak, S.; Woo, S.; Park, S.; Kim, S. The City-Wide Impacts of the Interactions between Shared Autonomous Vehicle-Based Mobility Services and the Public Transportation System. Sustainability 2021, 13, 6725. [Google Scholar] [CrossRef]
- Schwall, M.; Daniel, T.; Victor, T.; Favarò, F.; Hohnhold, H. Waymo Public Road Safety Performance Data. arXiv 2020, arXiv:2011.00038. [Google Scholar]
- Webb, N.; Smith, D.; Ludwick, C.; Victor, T.; Hommes, Q.; Favaro, F.; Ivanov, G.; Daniel, T. Waymo’s Safety Methodologies and Safety Readiness Determinations. arXiv 2020, arXiv:2011.00054. [Google Scholar] [CrossRef]
- Scanlon, J.M.; Kusano, K.D.; Daniel, T.; Alderson, C.; Ogle, A.; Victor, T. Waymo simulated driving behavior in reconstructed fatal crashes within an autonomous vehicle operating domain. Accid. Anal. Prev. 2021, 163, 106454. [Google Scholar] [CrossRef] [PubMed]
- Zenuity, R.J.; Warg, F.; Gyllenhammar, M.; Johansson, R.; Chen, D.; Heyn, H.-M.; Sanfridson, M.; Söderberg, J.; Thorsén, A.; Ursing, S.; et al. Towards an operational design domain that supports the safety argumentation of an automated driving system. In Proceedings of the 10th European Congress on Embedded Real Time Systems (ERTS 2020), Toulouse, France, 29–31 January 2020. [Google Scholar]
- On-Road Automated Driving Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Sun, C.; Deng, Z.; Chu, W.; Li, S.; Cao, D. Acclimatizing the Operational Design Domain for Autonomous Driving Systems. IEEE Intell. Transp. Syst. Mag. 2021, 14, 10–24. [Google Scholar] [CrossRef]
- Bartuska, L.; Labudzki, R. Research of basic issues of autonomous mobility. Proc. Transp. Res. Procedia 2020, 44, 356–360. [Google Scholar] [CrossRef]
- Tak, S.; Kang, K.; Lee, D. Development of V2I2V Communication-based Collision Prevention Support Service Using Artificial Neural Network. J. Korea Inst. Intell. Transp. Syst. 2019, 18, 126–141. [Google Scholar] [CrossRef]
- Tak, S.; Lee, J.-D.; Song, J.; Kim, S. Development of AI-Based Vehicle Detection and Tracking System for C-ITS Application. J. Adv. Transp. 2021, 2021, 78311–78319. [Google Scholar] [CrossRef]
- Arbabzadeh, N.; Jafari, M. A Data-Driven Approach for Driving Safety Risk Prediction Using Driver Behavior and Roadway Information Data. IEEE Trans. Intell. Transp. Syst. 2017, 19, 446–460. [Google Scholar] [CrossRef]
- Tak, S.; Kim, S.; Yu, H.; Lee, D. Analysis of Relationship between Road Geometry and Automated Driving Safety for Automated Vehicle-Based Mobility Service. Sustainability 2022, 14, 2336. [Google Scholar] [CrossRef]
- Zhang, L.; Xiao, W.; Zhang, Z.; Meng, D. Surrounding Vehicles Motion Prediction for Risk Assessment and Motion Planning of Autonomous Vehicle in Highway Scenarios. IEEE Access 2020, 8, 209356–209376. [Google Scholar] [CrossRef]
- Tak, S.; Yoon, J.; Woo, S.; Yeo, H. Sectional Information-Based Collision Warning System Using Roadside Unit Aggregated Connected-Vehicle Information for a Cooperative Intelligent Transport System. J. Adv. Transp. 2020, 2020, 1528028. [Google Scholar] [CrossRef]
- Seo, T.; Asakura, Y. Multi-Objective Linear Optimization Problem for Strategic Planning of Shared Autonomous Vehicle Operation and Infrastructure Design. IEEE Trans. Intell. Transp. Syst. 2021, 1–13. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Whitley, D. A genetic algorithm tutorial. Stat. Comput. 1994, 4, 65–85. [Google Scholar] [CrossRef]
- Jason, R. Schott Fault Tolerant Design Using Single and Multicriteria Genetic Algorithm Optimization; Massachusetts Institute of Technology: Cambridge, MA, USA, 1995. [Google Scholar]
- Lim, W.C.E.; Kanagaraj, G.; Ponnambalam, S.G. A hybrid cuckoo search-genetic algorithm for hole-making sequence optimization. J. Intell. Manuf. 2016, 27, 417–429. [Google Scholar] [CrossRef]
- Tabassum, M.; Mathew, K. A Genetic Algorithm Analysis towards Optimization solutions. Int. J. Digit. Inf. Wirel. Commun. 2014, 4, 124–142. [Google Scholar] [CrossRef]
- Ukkusuri, S.V.; Yushimito, W.F. A methodology to assess the criticality of highway transportation networks. J. Transp. Secur. 2009, 2, 29–46. [Google Scholar] [CrossRef]
- Wang, D.Z.W.; Liu, H.; Szeto, W.; Chow, A.H.; Wang, D.Z.W.; Liu, H.; Szeto, W.; Chow, A.H. Identification of critical combination of vulnerable links in transportation networks—A global optimisation approach. Transp. A Transp. Sci. 2016, 12, 346–365. [Google Scholar] [CrossRef] [Green Version]
- Sohouenou, P.Y.; Neves, L.A.; Christodoulou, A.; Christidis, P.; Presti, D.L. Using a hazard-independent approach to understand road-network robustness to multiple disruption scenarios. Transp. Res. Part D Transp. Environ. 2021, 93, 102672. [Google Scholar] [CrossRef]
- Girvan, M.; Newman, M.E.J. Community structure in social and biological networks. Proc. Natl. Acad. Sci. USA 2002, 99, 7821–7826. [Google Scholar] [CrossRef] [Green Version]
- Danila, B.; Yu, Y.; Marsh, J.A.; Bassler, K.E. Optimal transport on complex networks. Phys. Rev. E 2006, 74, 046106. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Hernandez, J.M.; van Mieghem, P. Betweenness centrality in a weighted network. Phys. Rev. E 2008, 77, 046105. [Google Scholar] [CrossRef] [Green Version]
- Puzis, R.; Altshuler, Y.; Elovici, Y.; Bekhor, S.; Shiftan, Y.; Pentland, A. Augmented betweenness Centrality for Environmentally Aware Traffic Monitoring in Transportation Networks. J. Intell. Transp. Syst. 2013, 17, 91–105. [Google Scholar] [CrossRef] [Green Version]

















| Origin | Destination | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | Scenario 5 | Scenario 6 |
|---|---|---|---|---|---|---|---|
| S1 | S7 | 2040 | 1020 | Evenly Distributed (40 for 552 OD pairs) | Evenly Distributed (20 for each OD) | Evenly Distributed (10 for each OD) | |
| S1 | S10 | 2040 | 1020 | ||||
| S1 | S14 | 1650 | 825 | ||||
| S1 | S15 | 2400 | 1200 | ||||
| S1 | S18 | 1650 | 825 | ||||
| S1 | S20 | 2400 | 1200 | ||||
| S2 | S6 | 1500 | 750 | ||||
| S2 | S14 | 1500 | 750 | ||||
| S2 | S15 | 1800 | 900 | ||||
| S2 | S18 | 1800 | 900 | ||||
| S2 | S20 | 1875 | 937 | ||||
| S2 | S23 | 1875 | 938 | ||||
| S3 | S6 | 2250 | 1125 | ||||
| S3 | S7 | 1800 | 900 | ||||
| S3 | S15 | 2250 | 1125 | ||||
| S3 | S19 | 1800 | 900 | ||||
| S3 | S20 | 1542 | 771 | ||||
| S3 | S22 | 1542 | 771 | ||||
| S13 | S5 | 2400 | 1200 | ||||
| S13 | S6 | 2400 | 1200 | ||||
| S13 | S7 | 1500 | 750 | ||||
| S13 | S8 | 1500 | 750 | ||||
| S13 | S10 | 2100 | 1050 | ||||
| S13 | S18 | 2100 | 1050 | ||||
| Sum | 22,857 | 22,857 | 22,857 | 22,080 | 11,040 | 5520 | |
| From Node | To Node | Plan | ||
|---|---|---|---|---|
| Scenario 1 | Scenario 2 | Scenario 3 | ||
| S1 | S2 | 1: constructing the C-ITS infrastructure | 1: constructing the C-ITS infrastructure | 1: constructing the C-ITS infrastructure |
| S2 | S1 | 1: constructing the C-ITS infrastructure | - | 1: constructing the C-ITS infrastructure |
| S8 | S16 | - | 1: constructing the C-ITS infrastructure | - |
| S17 | S19 | - | 2: remodeling the geometric road design | - |
| S24 | S21 | 1: constructing the C-ITS infrastructure | - | 1: constructing the C-ITS infrastructure |
| From Node | To Node | Plan | ||
|---|---|---|---|---|
| Scenario 1 | Scenario 2 | Scenario 3 | ||
| S1 | S2 | 1: constructing the C-ITS infrastructure | 1: constructing the C-ITS infrastructure | - |
| S17 | S19 | 1: constructing the C-ITS infrastructure | 2: remodeling the geometric road design | - |
| S19 | S20 | 1: constructing the C-ITS infrastructure | 1: constructing the C-ITS infrastructure | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tak, S.; Kim, J.; Lee, D. Study on the Extraction Method of Sub-Network for Optimal Operation of Connected and Automated Vehicle-Based Mobility Service and Its Implication. Sustainability 2022, 14, 3688. https://doi.org/10.3390/su14063688
Tak S, Kim J, Lee D. Study on the Extraction Method of Sub-Network for Optimal Operation of Connected and Automated Vehicle-Based Mobility Service and Its Implication. Sustainability. 2022; 14(6):3688. https://doi.org/10.3390/su14063688
Chicago/Turabian StyleTak, Sehyun, Jeongyun Kim, and Donghoun Lee. 2022. "Study on the Extraction Method of Sub-Network for Optimal Operation of Connected and Automated Vehicle-Based Mobility Service and Its Implication" Sustainability 14, no. 6: 3688. https://doi.org/10.3390/su14063688
APA StyleTak, S., Kim, J., & Lee, D. (2022). Study on the Extraction Method of Sub-Network for Optimal Operation of Connected and Automated Vehicle-Based Mobility Service and Its Implication. Sustainability, 14(6), 3688. https://doi.org/10.3390/su14063688