1. Introduction
The warehouse plays a critical role in logistics and is considered one of its most significant components [
1,
2,
3]. Ensuring its sustainability is important, as it impacts both economic and social factors and thus the overall sustainability of logistics [
4,
5]. The sustainability of a warehouse is crucial for its long-term viability. The resources that are utilized within the warehouse, such as space, equipment, and the workforce, are usually limited [
6,
7]. Without efficient resource utilization, order picking becomes unsustainable, resulting in increased energy consumption, capital expenditure, and human resources depletion.
The core activities of warehousing include receiving, storage location assignment, order picking, and shipping [
8,
9]. Several optimization strategies for making warehouses sustainable have been developed, such as warehouse layouts, storage location assignment, etc. [
10,
11]. Based on traditional layout warehouses, non-traditional layout warehouses were developed to decrease the pathways traveled to store and retrieve cargoes and reduce the energy cost [
12,
13]. The Flying-V warehouse layout [
14,
15], the Fishbone warehouse layout [
16], the chevron, leaf, and butterfly warehouse layouts [
17,
18], and the straight diagonal cross-aisle non-traditional warehouse [
19] are typical non-traditional warehouse layouts. The expected traveling distances for the Flying-V warehouse layout and the Fishbone warehouse layout are up to 20% shorter than those of traditional warehouses, which contributes to energy saving [
12]. Therefore, non-traditional layout warehouses are useful for improving the efficiency [
13]. Moreover, storage location assignment is another practical strategy to improve the warehousing efficiency. Storage location assignment refers to the sustainable management of warehousing by reasonably optimizing the placement of cargoes, improving the order-picking efficiency, and reducing energy loss and resource waste [
20]. Suitable storage location assignment can reduce the travel time and distance of picking robots, a practical strategy for improving the efficiency [
21,
22]. Therefore, this paper aims to answer the following research question:
How can a storage location assignment optimization algorithm be established for non-traditional layout warehouses to improve their efficiency and sustainability?
Although the advantages of non-traditional warehouse layouts and storage location assignments have been elaborated separately, they have rarely been combined. Additionally, storage location assignment for non-traditional layout warehouses has not been extensively considered. To address this gap, inspired by the superiority of non-traditional warehouse layouts and storage location assignments, these factors are integrated to provide a storage location allocation optimization algorithm for warehouses with non-traditional layouts to improve the storage efficiency. When assigning storage locations for non-traditional layout warehouses, the establishment of an optimization model and the design of an optimization algorithm are the main challenges. Firstly, to overcome these challenges, a multi-objective optimization model that considers both the order-picking efficiency and shelf stability as optimizing objectives is established. Subsequently, a storage location assignment optimization algorithm based on the Firework algorithm is proposed. Specifically, adaptive strategies are adopted in the explosion and selection stages, which enhance the convergence rate and optimization performance of the algorithm. Therefore, storage location assignment optimization for non-traditional layout warehouses can be effectively handled.
1.1. Literature Review
To make warehouses more sustainable, numerous studies have been conducted to optimize resource utilization, including routing, scheduling, storage location assignment, and other methods. Prior research developed Key Performance Indicators (KPIs) for assessing the sustainability of the warehousing performance, including economic, environmental, and social variables [
5,
7]. Specifically, economic variables include the warehouse operation performance and economic performance, while environmental variables include the resource allocation, emissions waste, and environmental commitments. Social variables include labor practices, decent work, and product responsibility. Chiang et al. [
23] developed a picking-list assignment strategy that groups similar items together to reduce the traveling distance and time for picking robots. This leads to an increased efficiency and a reduction in carbon emissions, contributing to a more sustainable supply chain. On the other hand, Popovic et al. [
7] focused on workforce scheduling problems to decrease the labor costs. In addition, Burinskiene et al. [
24] increased the efficiency of warehouse procedures by identifying wasteful warehouse processes and reducing the replenishment and order-picking costs. This paper improves warehousing sustainability by using a novel strategy. Non-traditional storage layouts and storage location assignments are comprehensively considered to achieve sustainable warehousing management. Specifically, a storage location assignment optimization algorithm for non-traditional layout warehouses is proposed, which improves the picking efficiency and increases the shelf stability. This enhances energy conservation in warehousing, promoting both environmental and economic benefits.
The design of a storage location assignment optimization algorithm must consider both the shelf stability and the picking efficiency, making it a multi-objective model [
25]. To address multi-objective optimization, several algorithms have been developed, such as the firework algorithm (FWA), the genetic algorithm (GA), the particle swarm optimization algorithm (PSO), and the polynomial algorithm [
26,
27,
28,
29]. Zhang et al. [
30] proposed a GA with a two-stage iterative approach to develop a layout that considers the adjacency and other constraints with the lowest transportation cost. For storage location formation, Li et al. [
31] proposed a multi-objective model and an improved GA considering the order-picking frequency and shelf stability based on the class storage policy. Chen et al. [
32] presented an established neighborhood structure for storage location assignment problems and created a tabu search algorithm. Zhang et al. [
33] expressed this as an integer programming model and created the simulated annealing algorithm. In view of the storage location assignment problem with a Flying-V layout, an approach to the storage location assignment problem based on the Flying-V layout was proposed by Liu et al. [
34]. Hu et al. [
35] formulated an optimization model for the storage location assignment, considering the inventory efficiency and shelf stability as optimizing objectives based on Fishbone layout characteristics. Soheyl et al. [
36] proposed the Multi-Objective Stochastic Fractal Search (MOSFS) to solve complex multi-objective optimization problems. With the consideration of uncertain parameters, objective functions, and constraints, a mathematical model was designed by Soheyl et al. [
25]. Additionally, several artificial-intelligence-based solution techniques have been formulated to solve the complex nonlinear problem. In this paper, a practical multi-objective optimization model for quantifying the warehousing sustainability is proposed by considering the characteristics of the storage location assignment, order-picking efficiency, and shelf stability as optimizing objectives.
1.2. Main Contributions
Although several algorithms have been employed to solve the storage location assignment problem, few of them consider the modeling of non-traditional layouts and multi-objective optimization as an integrated challenge. Therefore, storage location assignment for non-traditional layout warehouses remains a challenging task. In this paper, a storage location assignment for non-traditional warehouse layouts based on the FWA is proposed. The contributions are listed below:
- (a)
Establishing a model for non-traditional layout warehouses can be challenging. In this paper, a model of non-traditional layout warehouses is established in detail, which consists of a Flying-V layout and a Fishbone layout.
- (b)
A practical multi-objective optimization model is proposed to quantify the sustainability of warehousing. Specifically, the characteristics of the storage location assignment, order-picking efficiency, and shelf stability are taken as optimizing objectives, and a multi-objective optimization model is proposed.
- (c)
To address the multi-objective optimization model described above, a storage location assignment optimization algorithm based on the FWA is developed. Adaptive strategies are adopted for explosion and selection to improve the convergence rate and optimization performance of the algorithm.
Therefore, the storage location assignment optimization of non-traditional layout warehouses can be handled well. Furthermore, to verify the effectiveness and priority of the proposed algorithm, comparative simulations are implemented, which indicate a faster convergence rate and better optimization performance.
The structure of this paper is as follows:
Section 2 describes the modeling of non-traditional warehouse layouts, including the Flying-V layout and Fishbone layout.
Section 3 describes the modeling of storage location assignment optimization with integrated consideration of multiple optimizing objectives. Next,
Section 4 describes the design of the storage location assignment algorithm based on the FWA. To prove the priority of the proposed algorithm, the comparative GA is described in
Section 5. Moreover,
Section 6 presents comparative simulations of different storage location assignment algorithms for different non-traditional warehouse layouts, which verifies the significant priority of the proposed algorithm. Finally, the contributions and future research directions are summarized in
Section 7.
2. The Modeling of Non-Traditional Warehouse Layouts
The object of this research was to optimize storage location assignment for non-traditional warehouse layouts. In this section, the modeling of non-traditional warehouse layouts is derived, including the Flying-V layout and Fishbone layout, as shown in
Figure 1 and
Figure 2.
Before carrying out the modeling of non-traditional warehouse layouts, we assume that [
34,
35]:
- (a)
The numbering, weight, and access frequency of cargoes are known;
- (b)
The same kind of cargo can be stored in different storage locations.
- (c)
The horizontal speed and vertical speed of the picking robot are known, and its starting and braking processes can be ignored;
- (d)
During the picking process, the picking robot can only access one storage location every time;
- (e)
The width of the picking roadway is equal to the width of a shelf.
Moreover, some related parameters can be described as follows: The notations in this paper are defined in
Table 1. The length of the storage space is
l, the height of each shelf layer is
h, and the storage area is
k. Starting from the lower left corner, the area is divided into area 1, area 2, area 3, and area 4 in a counterclockwise direction. Area 3 and area 4 are the middle parts of
Figure 1 and
Figure 2.
x is the row number of the storage location,
y is the column number of the storage location,
z is the number of layers in the storage location, and
i is the number of cargoes. The cargo located in row
x, column
y, and floor
z in zone
k is marked as
, and
is the access frequency of the cargoes.
is the horizontal speed of the picking robot, and
is its vertical speed.
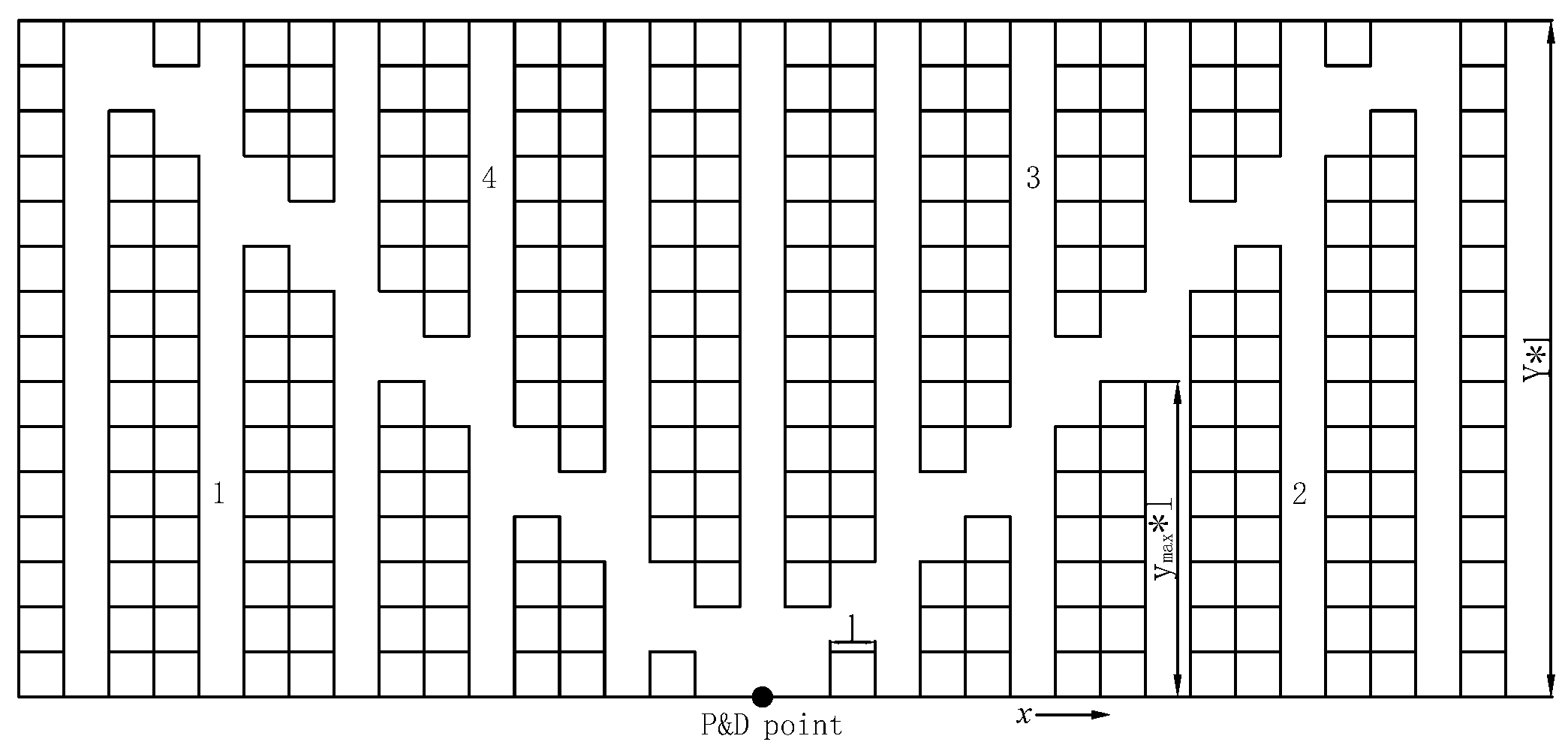
2.1. Model of the Flying-V Warehouse Layout
As shown in
Figure 1, the entire warehouse has four equal distribution areas, one
point, and two diagonal cross-aisles, and the shelves are arranged in the Flying-V layout.
The maximum columns of the shelf change continuously with x, and can be derived as
- (a)
- (b)
When
or
where
Y represents the maximum number of rows of shelves in the warehouse.
is the travel distance of the picking robot from the point to the shelf where the cargoes are located, and its expression is
- (a)
- (b)
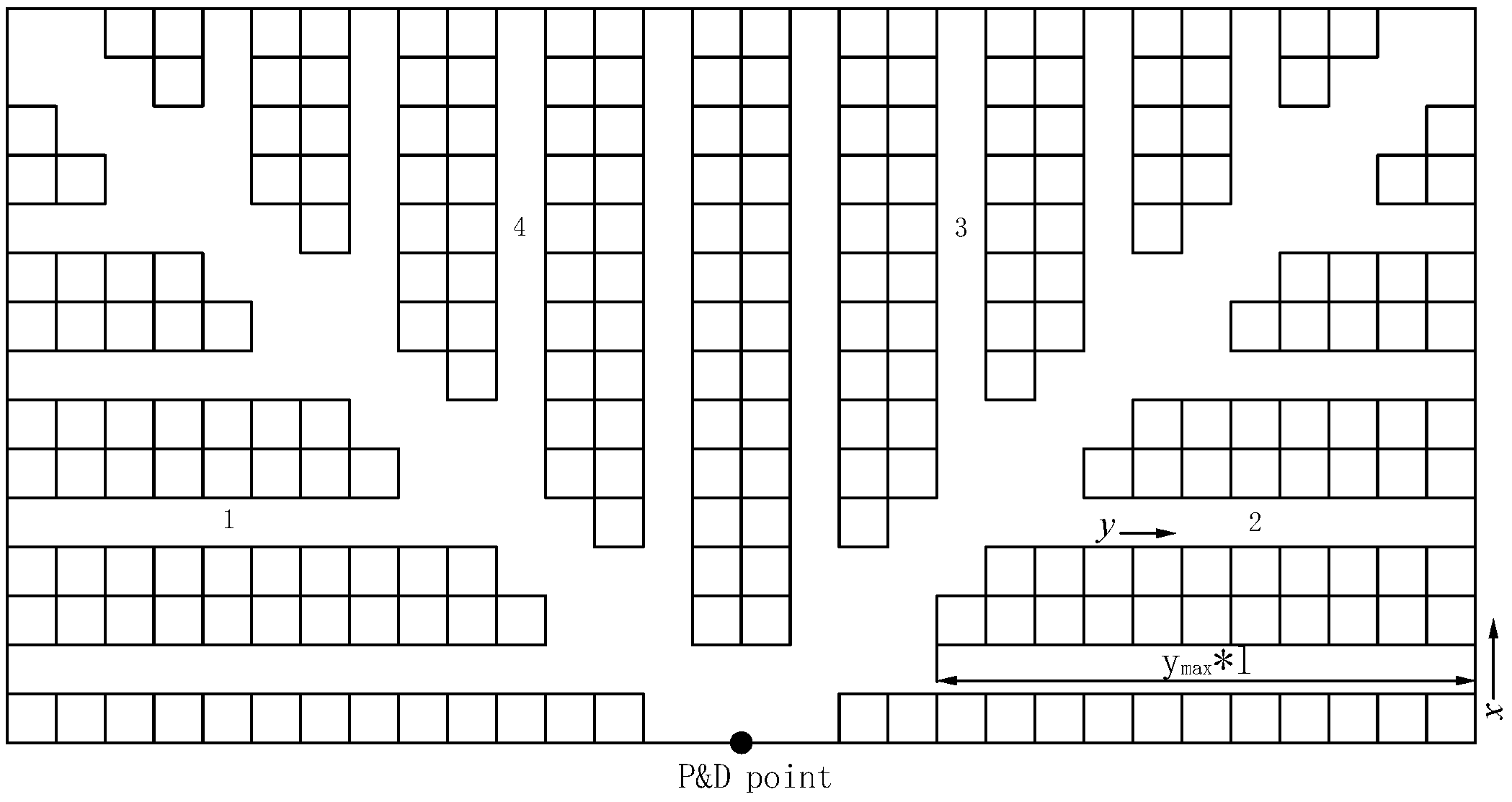
2.2. Model of the Fishbone Warehouse Layout
As shown in
Figure 2, similar to the Flying-V warehouse layout, the model of the Fishbone warehouse layout can be derived as follows:
The maximum number of columns
for the shelf changes continuously with
x, and can be derived as
is the travel distance of the picking robot from the
point to the shelf where the cargoes are located, and it can be derived as
3. Model of the Storage Location Assignment Optimization
The optimization of storage locations is conducted to assign suitable storage locations for cargoes based on their characteristics, i.e., weight and picking frequency [
19], which is helpful to sustainable warehousing management. The picking frequency varies among different types of cargo. To improve the picking efficiency, the picking time for all cargoes should be minimized, which can be achieved by calculating the sum of the product of the picking efficiency and the picking time of each cargo. Although existing research has considered the warehouse efficiency for storage and retrieval [
37,
38], the shelf stability, which is influenced by the weight of each cargo, has not been sufficiently considered. To promote shelf stability, the overall center of gravity of the cargo should be maintained as low as possible. Therefore, multiple optimizing objectives for non-traditional warehouse layouts are fully considered in this paper, such as the stability of the shelf and the efficiency of storing and retrieving cargoes. The multi-optimization model for storage location assignment optimization can be derived as follows:
Objective function:
where
Equation (
7) represents the objective function established through the efficiency of warehouses for storage and retrieval, and Equation (
8) represents the objective function established using the center of gravity of all cargoes. Equation (
9) represents the constraints of storage location assignment in non-traditional warehouse layouts, and
is the weight of cargoes numbered
i.
For multi-objective optimization problems, many solutions have been proposed, in which the weight method is a widely utilized one [
39]. For storage location assignment, the dimensions and ranges of the objective function (
7) and (
8) are quite different. Therefore, the weight method cannot be directly used, which results in certain objective values being weakened. To solve this issue, the dimension of each single objective function is normalized in this paper, using the optimal value of each single objective function. Thus, the multi-objective problem is transformed into a single-objective problem. The overall objective function
f and the fitness function
g are derived as follows:
where
and
represent the weights of two sub-objective functions. Sub-objective functions
and
can be obtained by dimensional normalization:
where
represents the optimal value for the efficiency of warehouses for storage and retrieval (
7), and
represents the optimal value for the center of gravity of all cargoes (
8).
4. Algorithm Design with the Firework Algorithm
Proposed by Tan and Zhu [
40], the FWA has been widely applied for optimization due to its advantages. For example, it has been used successfully to optimize the local-concentration model’s parameters for spam detection [
41], and for a Gaussian process regression model for determining the WiFi indoor location [
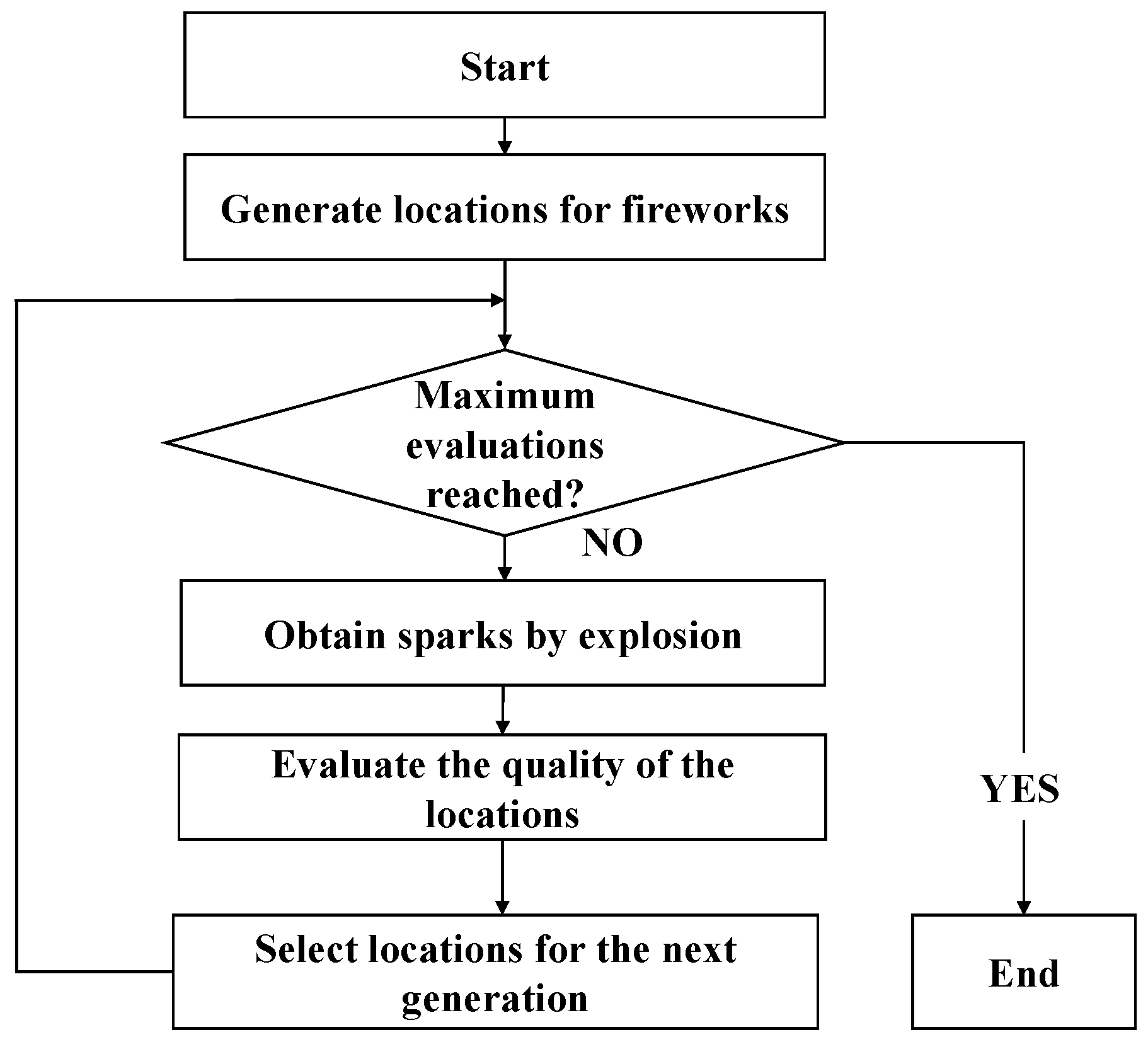
42]. As shown in
Figure 3, a storage location assignment algorithm for non-traditional warehouse layouts based on the FWA is proposed in this paper. The algorithm mainly consists of four steps: explosion, mutation, evaluation, and selection. In particular, the location of a firework represents a candidate solution to the storage location assignment for non-traditional warehouse layouts, and an explosion represents a random search operation in the solution space around the firework. The main steps of the proposed algorithm are described as follows:
- (a)
Firstly, inspired by the phenomenon of firework explosion, a certain number of firework locations are generated in the search space, which will generate a set of sparks by exploding.
- (b)
Secondly, the location of sparks is obtained by explosion and mutation. A firework with higher fitness can explode with a greater number of sparks with a smaller amplitude, while a firework with lower fitness can explode with fewer sparks with a larger amplitude.
- (c)
Thirdly, the quality of each firework location is derived with the fitness function (
11).
- (d)
Then, the fireworks and sparks with high fitness are selected as the locations (candidate solutions) for the next generation’s fireworks.
- (e)
Finally, optimization ends when the maximum number of evaluations is reached.
Moreover, to better illustrate the design process of the proposed algorithm, some key parts are described in detail below.
4.1. Number of Sparks
The number of sparks depends on the quality of each firework and can be derived as follows.
where
j is the number of fireworks.
f is the overall objective function (
10).
is the maximum value of the objective function among
n fireworks.
is a parameter controlling the total number of sparks generated by
n fireworks.
denotes the smallest constant in the computer, which is utilized to avoid a zero-division error. To avoid the overwhelming effects of splendid fireworks, bounds for
are designed as shown in (
15).
where
a and
b are constant parameters.
4.2. Amplitude of Explosion
The amplitude of explosion for each firework can be derived as follows: In contrast to the design of the spark number, the amplitude of a good firework explosion is smaller than that of a bad one.
where
denotes the maximum explosion amplitude, and
is the minimum value of the objective function among
n fireworks.
4.3. Obtaining Sparks by Explosion
The location of each spark
generated by
can be obtained by randomly setting
w dimensions (
,
), which is calculated by
where
w represents the random dimensions of sparks,
, and
d is the dimensionality of firework
.
Moreover, to maintain the diversity of the sparks, a Gaussian distribution with a mean of 1 and standard deviation of 1 is utilized to define the coefficient of the explosion. A certain number of sparks are generated in each explosion generation.
4.4. Selection of Locations
At the beginning of each explosion generation, the current best location
is always kept for the next explosion generation. After that,
locations are selected based on their distances to other locations to maintain the diversity of the sparks. The next generation of fireworks is selected using the roulette method with the selection probability [
43,
44]. The selection probability of each firework location
can be derived as follows:
where
K is the set of all current locations of both fireworks and sparks.
represents the distance between a location
and other locations
, which can be derived as follows:
As the evaluations reach the desired evaluation point, the optimal storage location assignment can be obtained.
5. Genetic Algorithm
To make the performance superiority of the proposed storage-location-assignment-based algorithm on the FWA more convincing, the genetic algorithm (GA) was selected as a comparative object. The GA is widely used to solve combinatorial optimization problems [
28]. However, in the actual application process of the traditional GA, the phenomenon of prematurity often occurs in the early stage of evolution, and the phenomenon of slow convergence often occurs in the later stage of evolution [
45,
46,
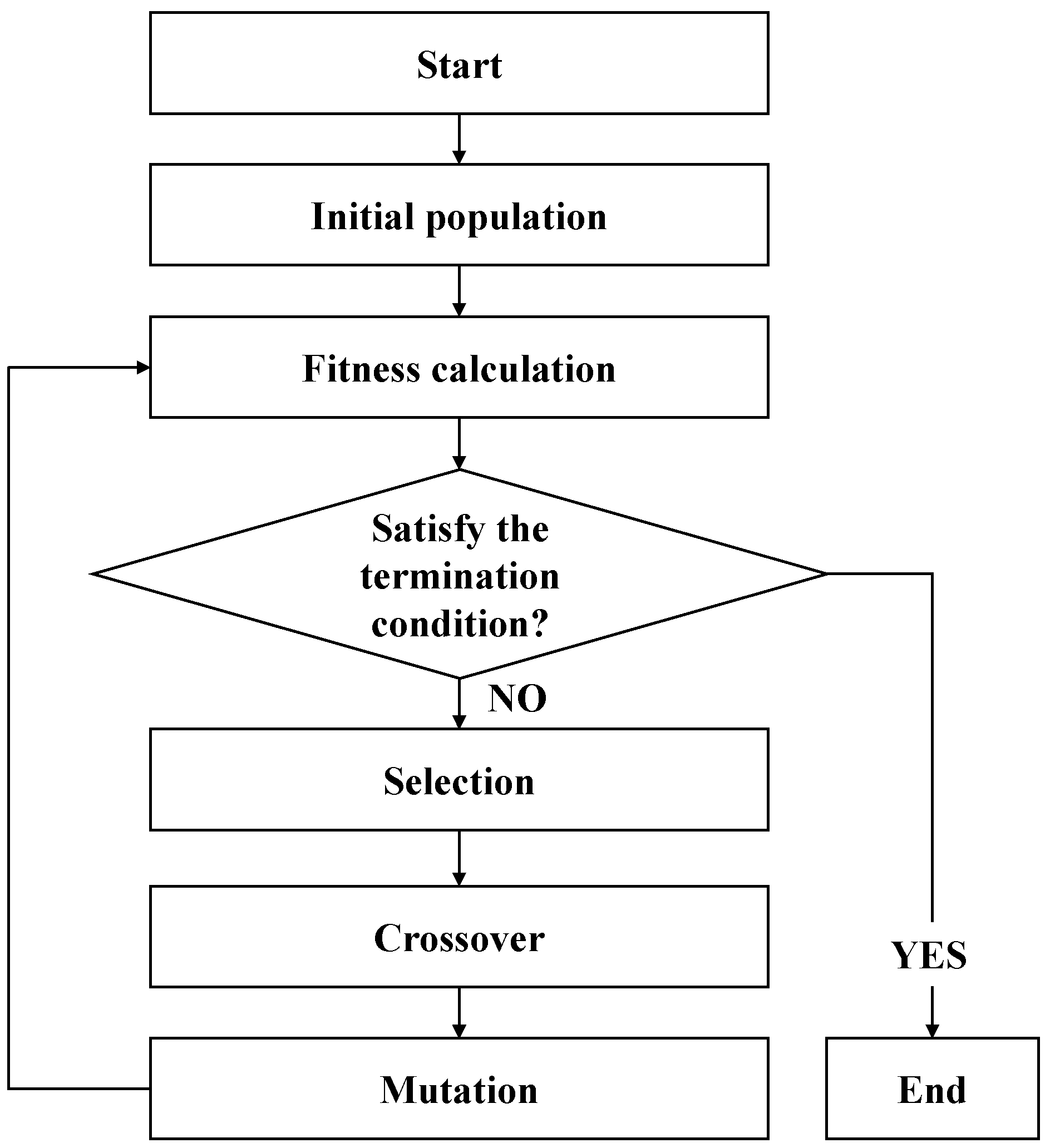
47]. The deficiencies can be effectively solved and the optimization performance can be improved by the adaptive mechanism. Therefore, an adaptive strategy is implemented among the selection, crossover, and mutation operations of the genetic algorithm. The framework of GA is shown in
Figure 4.
Inputs: (number of cargoes), (weight of cargoes), (picking frequency of cargoes), (horizontal speed of the picking robot), (vertical speed of the picking robot), l (length of the storage location), h (height of each shelf layer), , (weight of the two sub-objective functions), and N (population of the GA).
Output: optimal assignment of storage locations for non-traditional warehouse layouts.
- Step 1.
Input the parameters of the storage location assignment , , , , , l, h, , .
- Step 2.
Initialize the adaptive genetic algorithm parameters.
- Step 3.
Start the algorithm and initialize the population.
- Step 4.
Determine whether the number of iterations has been reached. If so, go to Step 5; otherwise, continue.
- Step 4.1.
Calculate the objective function value and the fitness of the individuals in the population.
- Step 4.2.
Select: Adaptively transform the fitness value.
- Step 4.3.
Retain the optimal individual.
- Step 4.4.
Crossover: Carry out an adaptive transformation of the crossover rate.
- Step 4.5.
Mutation: Carry out an adaptive transformation of the mutation rate.
- Step 5.
End of the algorithm: The optimal assignment of storage locations for non-traditional warehouse layouts can be obtained.
6. Simulation
6.1. Simulation Setup
To describe and verify the optimized performance of the proposed algorithm, two typical non-traditional warehouse layouts, i.e., the Flying-V layout and Fishbone layout, were selected as the research objects for the comparative simulation. The information about the cargoes is shown in
Table 2. It was provided by an automobile parts manufacturer. All parameters in the simulation are expressed according to the International System of Units (SI).
To make the performance comparison of the optimized algorithm more convincing, GA and FWA were selected as comparative objects for this simulation. The parameters of these algorithms were selected with the overall consideration of the operating frequency range of the storage location assignment and the response time of the algorithms.
: GA. The framework of the GA is shown in
Figure 4. The primary parameters were specified as follows:
The maximum evolutionary generation was set to , and the population was set to .
: For the proposed algorithm based on the FWA, the primary parameters were specified as follows:
The maximum evolutionary generation was set to , the initial firework number was , , , , and .
To verify the performance levels of these comparative algorithms with different non-traditional warehouse layouts, two simulations were designed to reflect the storage location assignment performance to a certain extent.
SET1: Flying-V warehouse layout.
SET2: Fishbone warehouse layout.
6.2. Simulation of SET1
To compare the optimization performances of these storage location assignment algorithms for the Flying-V warehouse layout, simulation SET1 was designed as shown in
Figure 1. The maximum number of rows of storage locations in the 1st and 2nd areas is
, and that in the 3rd and 4th areas is
. The length of the storage space
l is
, and the height of each shelf layer
h is
; the maximum number of shelf layers is
, the horizontal speed of the picking robot is
, and the vertical speed is
. The weight of two sub-objective functions,
and
, is
.
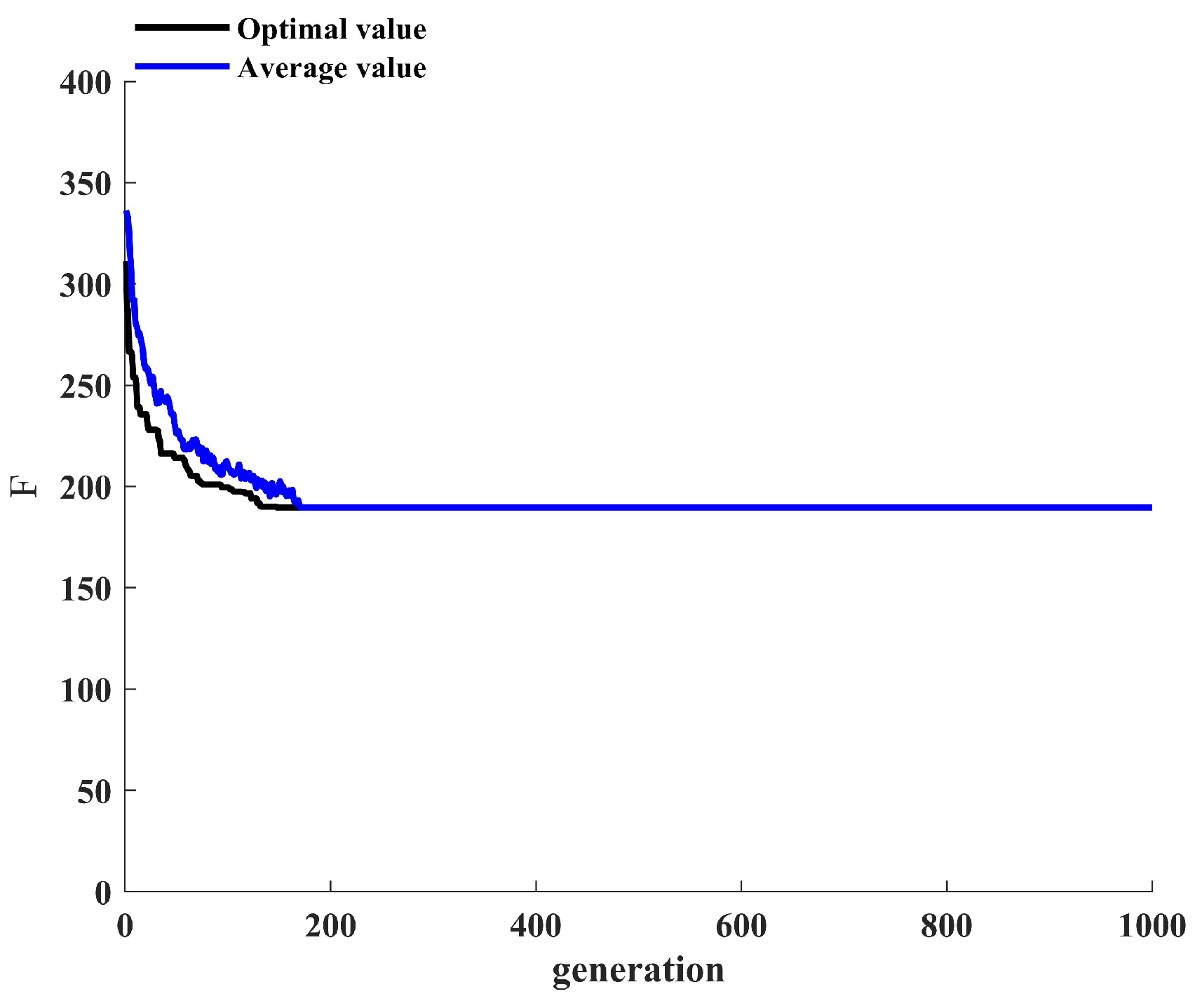
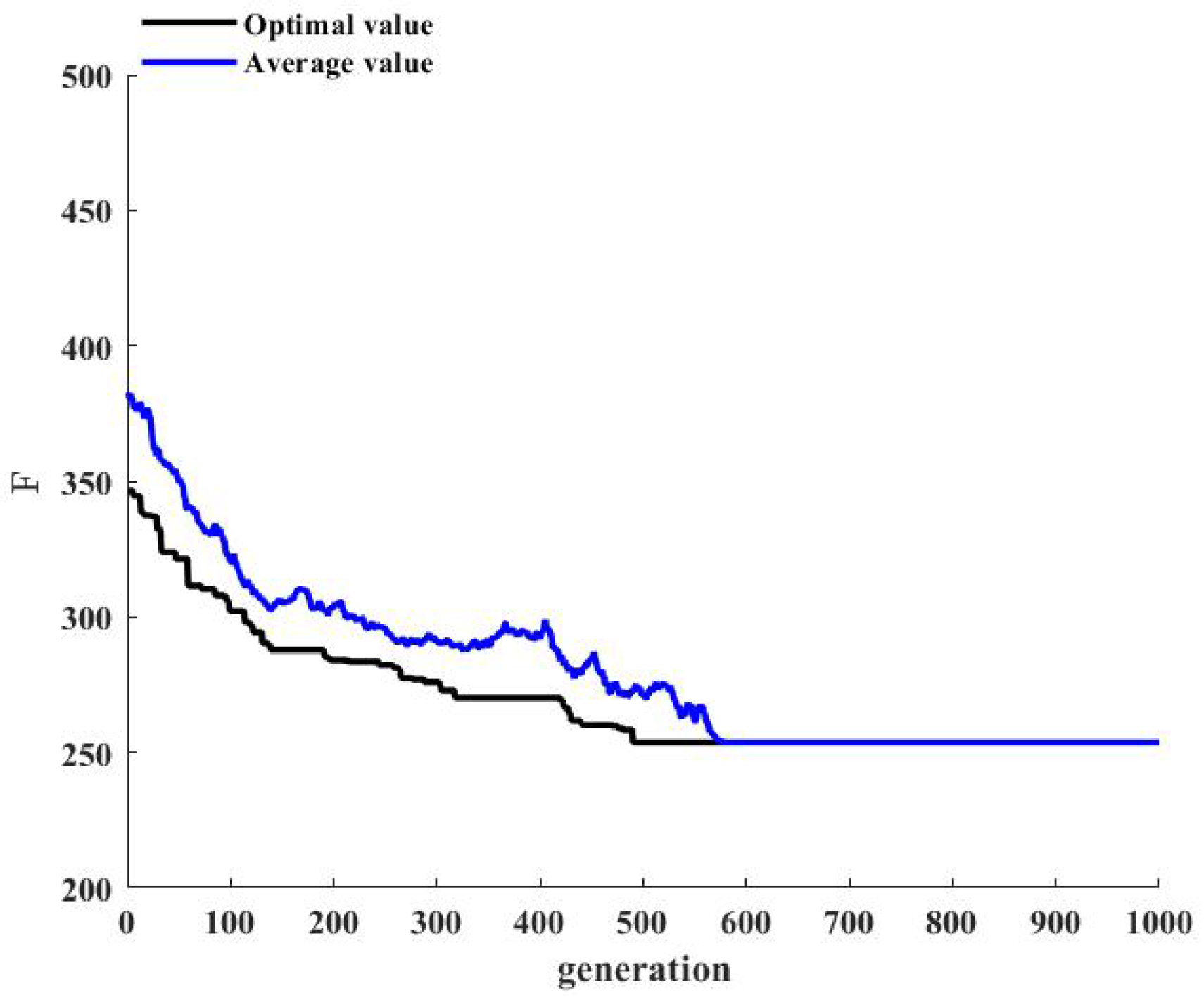
For the comparative simulation conducted in SET1, the simulation results are shown in
Figure 5 and
Figure 6. The average and optimal values of the optimizing objectives for each generation in the iterative process of the FWA are shown in
Figure 5. The average and optimal values of the optimizing objectives for each generation in the iterative process of the GA are shown in
Figure 6. Moreover, a performance comparison of the two algorithms is shown in
Table 3. Optimal solutions for the proposed algorithm and GA are shown in
Table 4 and
Table 5.
As can be seen from
Figure 5 and
Figure 6 and
Table 3, the optimal and the average values of the objective function show a gradual downward trend in the iterative process. According to the simulation results of the GA algorithm presented in
Figure 6, when the iteration exceeds 558 generations, the optimal value of the objective function tends to converge, the average objective function value of the initial population is 382.7, and the average objective function value after algorithm optimization and convergence is 253.7. The optimization effect increases by
. According to the simulation results of the FWA shown in
Figure 5, when the number of iterations exceeds 178, the optimal value of the objective function tends to converge, the average objective function value of the initial population is 336.4, and the average objective function value after algorithm optimization and convergence is 189.6. The optimization effect increases by
. To make a comparison of the computational complexity, the convergence times of these algorithms were calculated. The convergence time of the proposed algorithm was 4.55 s, and the convergence time of the GA was 76.89 s. Moreover, the optimization performance of the proposed algorithm for at least 30 different size (small, medium, and large) instances is provided in
Table 6,
Table 7 and
Table 8, which verifies the applicability of the proposed model and its solution procedure.
To verify the performance of the proposed algorithm, the well-known commercial software CPLEX 12.10 was used to solve this model for different instances of varying scales, as presented in
Table 9. The results show that, for small- and medium-scale instances, the FWA can obtain reasonable solutions compared to those generated by CPLEX, with an average gap of less than 8.51%. In terms of the calculating time, the FWA requires significantly less time to calculate instances compared to CPLEX. For large-scale instances, the FWA can rapidly find a solution, whereas CPLEX cannot find a feasible solution within a reasonable time window. As such, the proposed algorithm can effectively improve the solving efficiency of complex models and ensure the solution quality.
Through the performance comparison mentioned above, the response speed of the proposed algorithm was shown to be quicker than that of GA, and the convergence performance was better than that of the GA. Therefore, the proposed algorithm is more suitable for storage location assignment for Flying-V layout warehouses. The results demonstrate that the proposed optimizing algorithm effectively increased the sustainability of the warehouses. Specifically, the energy consumption needed for picking robots decreased by lowering the center of gravity of the cargo storage location assignment and increasing the picking efficiency. For the Flying-V layout, it is a practical storage location assignment optimizing algorithm.
6.3. Simulation of SET2
To compare the optimization performances of these storage location assignment algorithms with the Fishbone warehouse layout, the SET2 simulation was designed as shown in
Figure 2. The maximum number of rows of storage space is
. The length of the storage space is
. The height of each shelf layer is
. The maximum number of shelf layers is
. The horizontal speed of the picking robot is
, the vertical speed is
, and the weight of two sub-objective functions,
and
, is
.
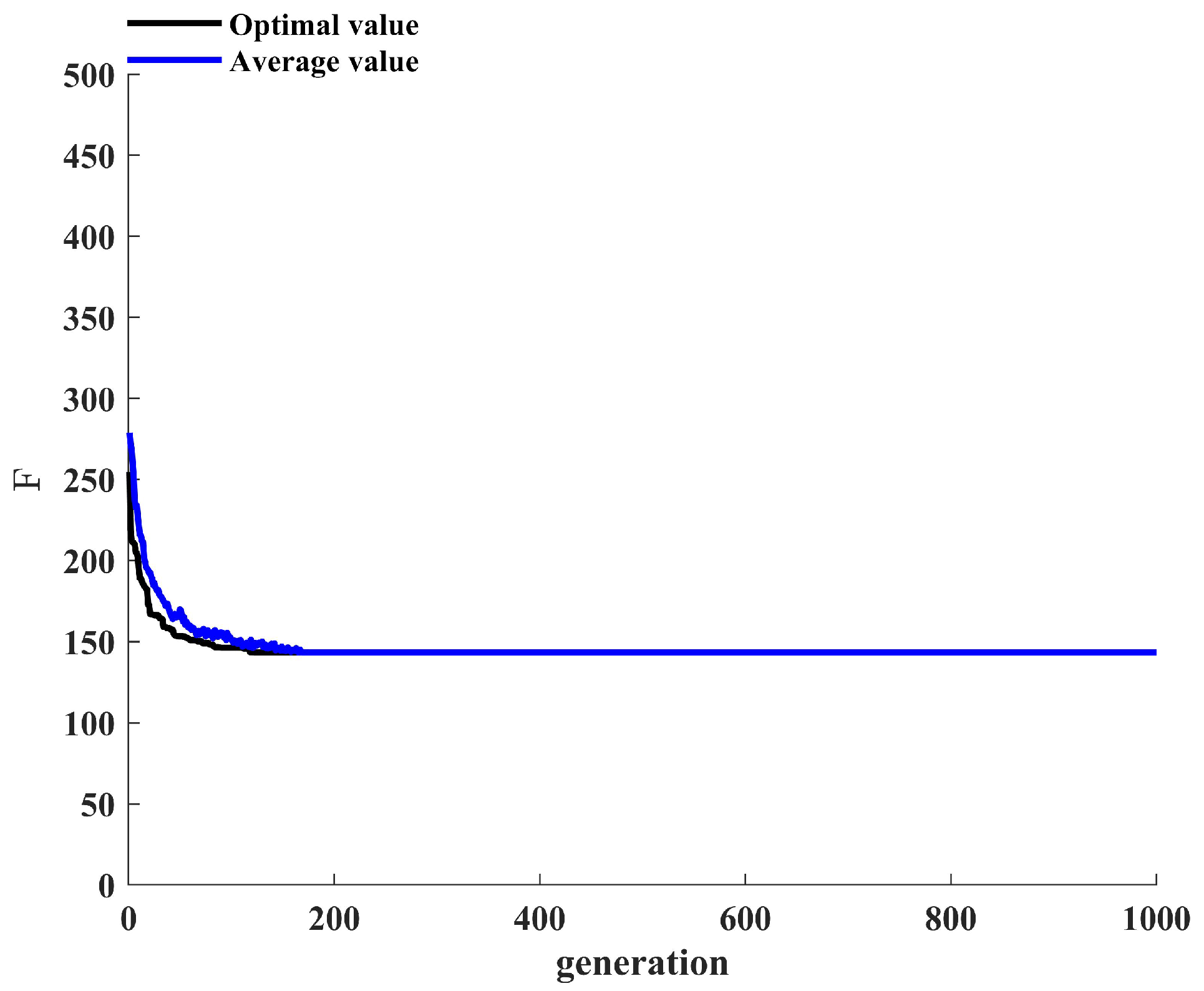
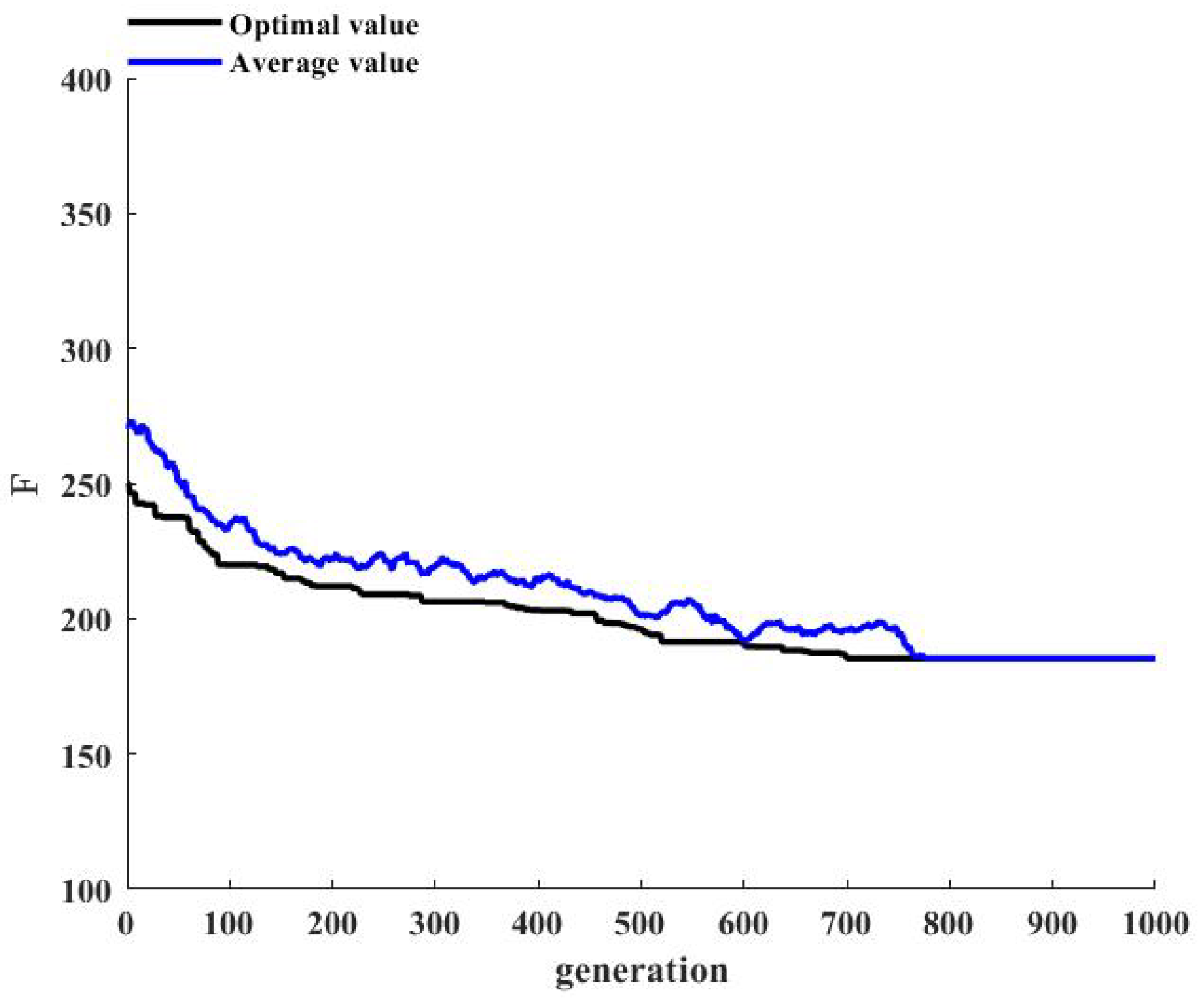
For the comparative simulation performed with SET2, the simulation results are shown in
Figure 7 and
Figure 8. The average and optimal values of the optimizing objective of each generation in the iterative process of the FWA are shown in
Figure 7. The average and optimal values of the optimizing objectives for each generation in the iterative process of the GA are shown in
Figure 8. Moreover, a performance comparison of the two algorithms is shown in
Table 10. The optimal solutions for the proposed algorithm and the GA are shown in
Table 11 and
Table 12.
As can be seen from
Figure 7 and
Figure 8 and
Table 10, the optimal and the average values of the objective function show a gradual downward trend in the iterative process. According to the simulation results of the GA presented in
Figure 8, when the number of iterations exceeds 647 generations, the optimal value of the objective function tends to converge, the average objective function value of the initial population is 308.2, and the average objective function value after optimization and convergence is 217.1. The optimization effect increases by
. According to the simulation results of the FWA shown in
Figure 7, when the number of iterations exceeds 176, the optimal value of the objective function tends to converge, the average objective function value of the initial population is 278.8, and the average objective function value after optimization and convergence is 143.3. The optimization effect increases by
. The convergence time of the proposed algorithms is 3.41 s, and the convergence time of the GA is 41.17 s. Moreover, the optimization performance of the proposed algorithm for at least 30 different size (small, medium, and large) instances is provided in
Table 13,
Table 14 and
Table 15, which verifies the applicability of the proposed model and its solution procedure.
Futhermore, CPLEX was utilized to solve this model, as shown in
Table 16. The results show that, for small- and medium-scale instances, the FWA can obtain reasonable solutions compared to those generated by CPLEX, with an average gap of less than 8.19%. In terms of the calculating time, the FWA requires less computing time compared to CPLEX. For larger-scale instances, the FWA can rapidly find a solution, whereas CPLEX cannot find a feasible solution. As such, the proposed algorithm can effectively improve the solving efficiency of complex models while ensuring the solution quality.
Through the performance comparison mentioned above, the response speed of the proposed algorithm was shown to be quicker than that of the GA, and the convergence performance was better than that of the GA. Therefore, the proposed algorithm is more suitable for storage location assignment for Fishbone layout warehouses. The results show that the proposed optimizing algorithm improves the sustainability of warehouses. Specifically, by lowering the center of gravity of the cargo distribution and improving the picking efficiency, the energy consumption required for picking robots is effectively reduced. It is a sustainable storage location assignment algorithm for the Fishbone layout.
According to the above analysis of the simulation results for SET1 and SET2, compared with the GA, the priority and effectiveness of the proposed storage location assignment algorithm for non-traditional warehouse layouts were verified. Theoretically, this paper contributes to sustainable warehousing by combining the superiority of non-traditional warehouse layouts and storage location assignments. In this way, a storage location assignment optimization algorithm for non-traditional layout warehouses is provided.
7. Conclusions
As the resources utilized within warehouses, such as space, equipment, and the workforce, are often limited, achieving warehousing sustainability within these constraints is crucial [
48]. The objective of this study was to improve the warehousing efficiency and sustainability by establishing a storage location assignment optimization algorithm for non-traditional layout warehouses. The contributions are threefold. First, establishing a model for non-traditional layout warehouses can be challenging. This was addressed by establishing Flying-V layout and Fishbone layout models for non-traditional layout warehouses in detail. Second, to quantify warehousing sustainability, a practical multi-objective optimization model that considers the storage location assignment, order-picking efficiency, and shelf stability as optimizing objectives was proposed. Third, a storage location assignment optimization algorithm based on the FWA was proposed. The proposed algorithm leverages adaptive techniques in the explosion and selection stages, thereby improving the convergence rate and optimization performance. The results show that the proposed algorithm has a faster convergence rate and a better optimization performance. After optimization, there is greater potential for promoting the warehousing efficiency and increasing the warehouse sustainability.
This research presented a strategy to enable efficient and sustainable operations while cutting costs within warehouses. By employing a storage location assignment optimization algorithm for non-traditional layout warehouses, the limited space and workforce resources can handle more cargo. The proposed algorithm improves the shelf stability and reduces the travel distance of picking robots by lowering the center of gravity of cargo storage and optimizing cargo storage location assignment. All of this creates the potential to increase the warehousing sustainability.
The application of the proposed optimizing algorithm is not limited to the sustainable warehousing management mentioned in this paper. It can also be applied to the sustainable management of equipment resources, supermarket management, library management, and any type of management that uses a sustainable storage location assignment system. By utilizing these systems, organizations can achieve optimal storage location assignment with limited space and equipment resources. This results in increased efficiency and reduced resource waste.
The limitations of this paper are as follows: First, although the two typical non-traditional layout warehouses, Flying-V and Fishbone, were chosen as the research objectives, more non-traditional warehouse layout designs can be explored, such as leaf and butterfly and chevron ones. Second, the optimization of order-picking tracking and the integration of different algorithms can be considered. Lastly, the proposed algorithm has not been applied to practical warehouses. In the future, it will be applied to practical warehouses, and the corresponding experimental performance will be analyzed.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}