

Modelling and Dynamic Analysis of Adaptive Neuro-Fuzzy Inference System-Based Intelligent Control Suspension System for Passenger Rail Vehicles Using Magnetorheological Damper for Improving Ride Index



Abstract
:1. Introduction
2. Materials and Methods
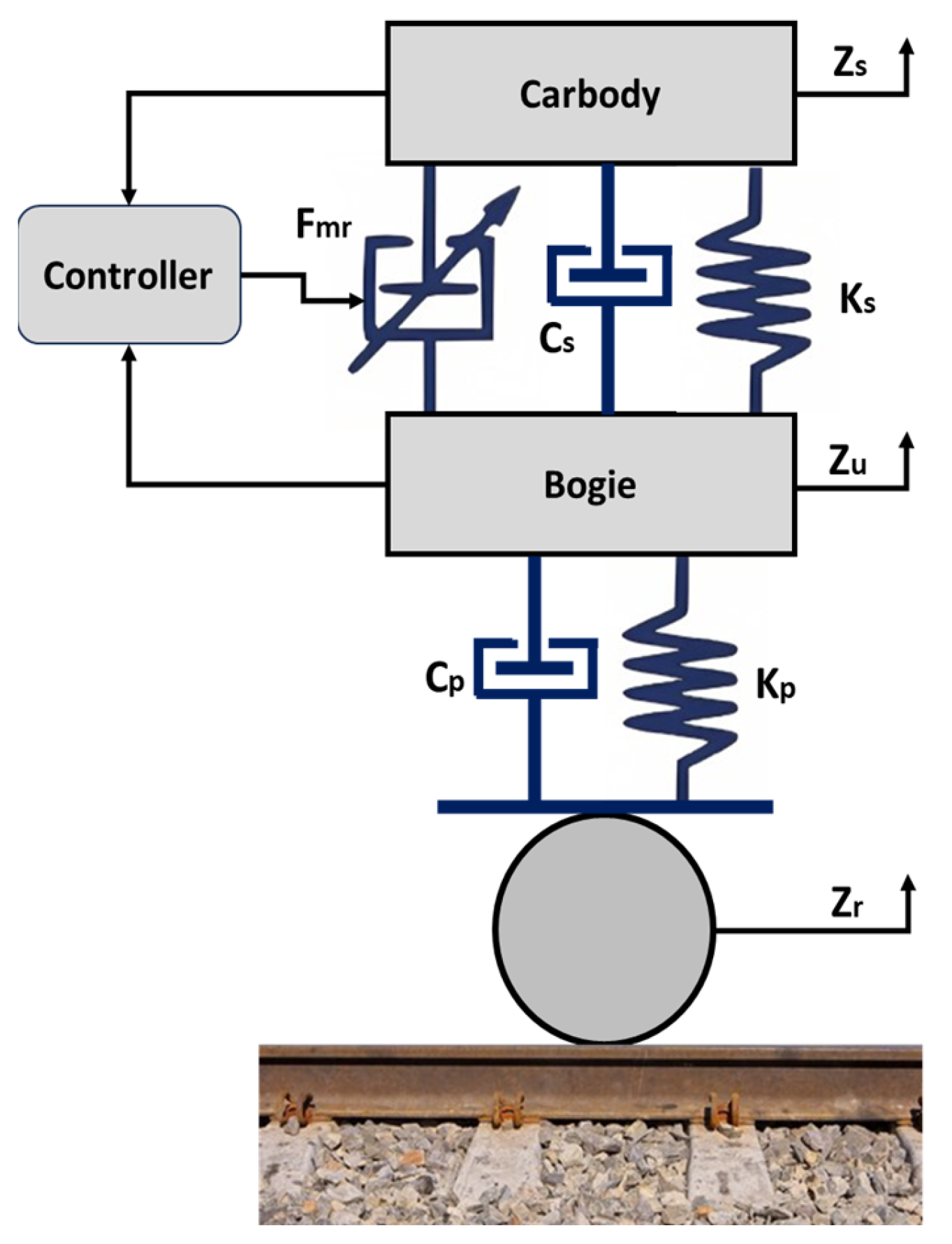
2.1. EoM of Rail Vehicle Model
2.1.1. Nonlinear Elements in Rail Vehicle
2.1.2. EoM of Carbody
2.1.3. EoM of Bogie Frame
2.1.4. EoM of Wheel Axle
2.2. Modelling of Track Irregularities
2.3. Mathematical Model of Magnetorheological (MR) Damper
2.3.1. Dynamic Model of MR Damper
2.3.2. Control Algorithm for MR Damper
2.4. Adaptive Neuro-Fuzzy Inference System (ANFIS)
- Rule 1: If is is , then
- Rule 2: If is is , then
- Rule N: If is is , then
2.4.1. Fuzzy Identification of MR Damper
2.4.2. Data Collection
2.4.3. Training of the Model
2.4.4. Model Validation
3. Selection of ANFIS over Other Controllers for MR Damper Performance
4. Numerical Validation of the Mathematical Model
5. Results
5.1. MR Damper Characteristics
5.2. Acceleration and Displacement Response of Rail Vehicle
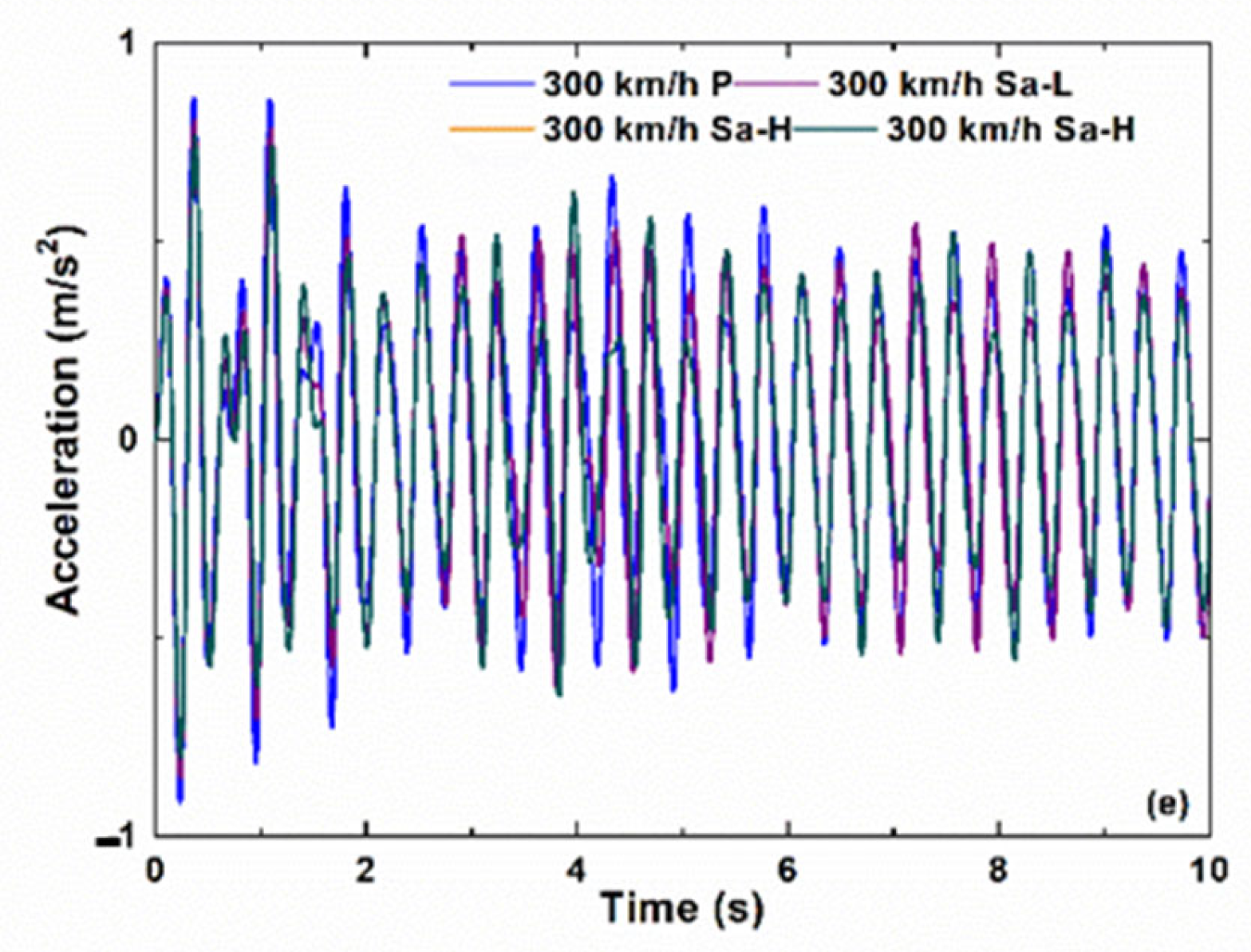
5.2.1. Acceleration Response Analysis
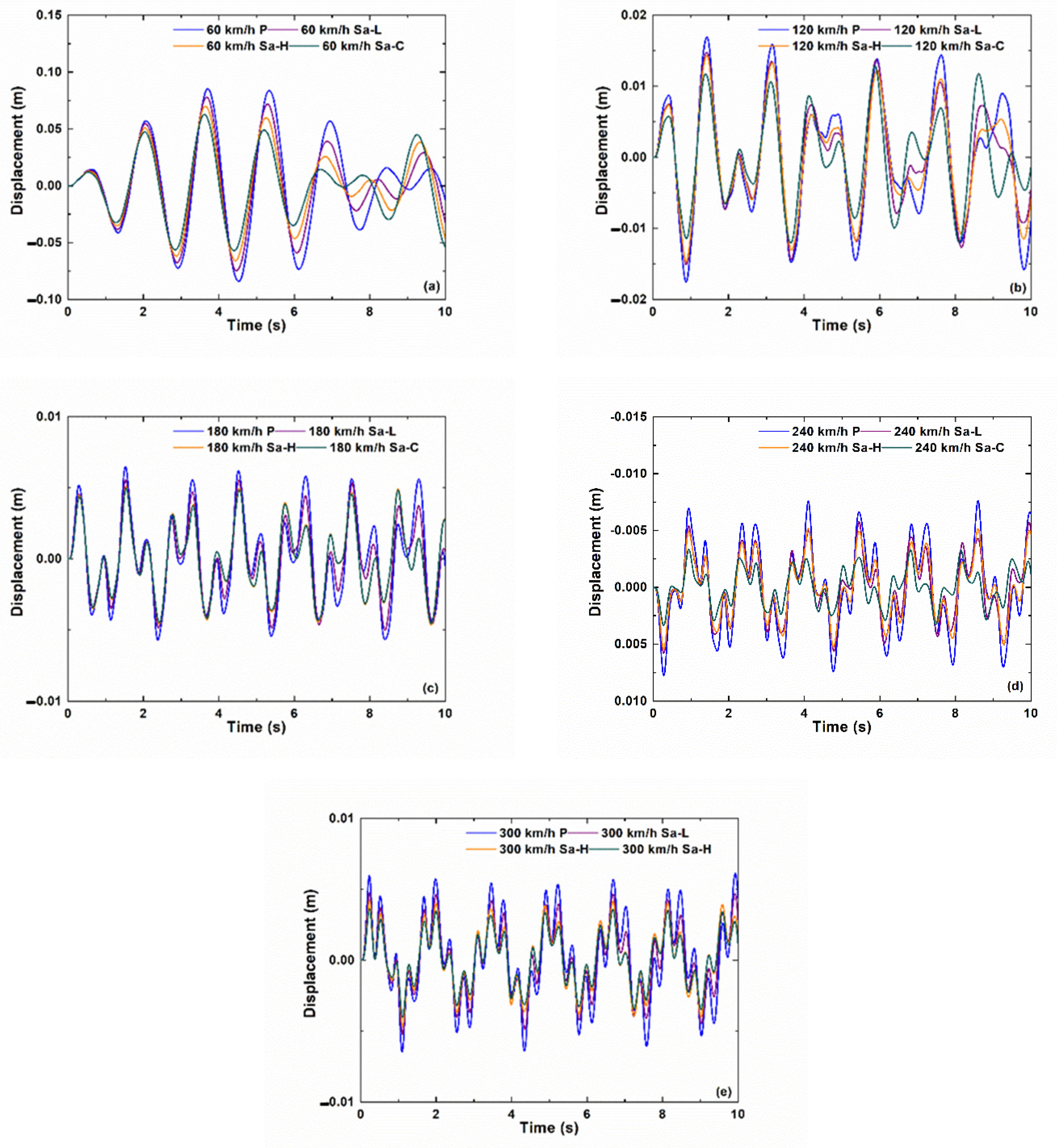
5.2.2. Displacement Response Analysis
5.3. Comparison of Ride Indices
5.3.1. Comparison of Ride Quality Index (RQI)
5.3.2. Comparison of Ride Comfort Index
6. Discussion
6.1. Performance Comparison with Other Methods
6.2. Adaptive Control and Dynamic Response
6.3. Implications for Rail Vehicle Suspension Design
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, C.; Chen, L.; Yang, X.; Zhang, X.; Yang, Y. General Theory of Skyhook Control and its Application to Semi-Active Suspension Control Strategy Design. IEEE Access 2019, 7, 101552–101560. [Google Scholar] [CrossRef]
- Jafari, B.; Mashadi, B. Valve control of a hydraulically interconnected suspension system to improve vehicle handling qualities. Veh. Syst. Dyn. 2023, 61, 1011–1027. [Google Scholar] [CrossRef]
- Fu, B.; Bruni, S. An examination of alternative schemes for active and semi-active control of vertical car-body vibration to improve ride comfort. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 236, 386–405. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, Y.; Yang, S.; Liao, Y.; Chen, Z. Analysis on new semi-active control strategies to reduce lateral vibrations of high-speed trains by simulation and hardware-in-the-loop testing. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 236, 960–972. [Google Scholar] [CrossRef]
- Fu, B.; Liu, B.; Di Gialleonardo, E.; Bruni, S. Semi-active control of primary suspensions to improve ride quality in a high-speed railway vehicle. Veh. Syst. Dyn. 2022, 1–25. [Google Scholar] [CrossRef]
- Chen, X.; Shen, L.; Hu, X.; Li, G.; Yao, Y. Suspension parameter optimal design to enhance stability and wheel wear in high-speed trains. Veh. Syst. Dyn. 2023, 1–23. [Google Scholar] [CrossRef]
- La Paglia, I.; Rapino, L.; Ripamonti, F.; Corradi, R. Modelling and experimental characterization of secondary suspension elements for rail vehicle ride comfort simulation. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2023, 095440972311788. [Google Scholar] [CrossRef]
- Sun, X.; Wang, P.; Xu, J.; Xu, F.; Gao, Y. Simulation of the inherent structural irregularities of high-speed railway turnouts based on a virtual track inspection method. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2023, 237, 114–123. [Google Scholar] [CrossRef]
- Yang, S.; Zhao, Y.; Liu, Y.; Liao, Y.; Wang, P. A new semi-active control strategy on lateral suspension systems of high-speed trains and its application in HIL test rig. Veh. Syst. Dyn. 2023, 61, 1317–1344. [Google Scholar] [CrossRef]
- Boada, M.J.L.; Calvo, J.A.; Boada, B.L.; Díaz, V. Modeling of a magnetorheological damper by recursive lazy learning. Int. J. Non. Linear. Mech. 2011, 46, 479–485. [Google Scholar] [CrossRef]
- Arias-Montiel, M.; Florean-Aquino, K.H.; Francisco-Agustin, E.; Pinon-Lopez, D.M.; Santos-Ortiz, R.J.; Santiago-Marcial, B.A. Experimental Characterization of a Magnetorheological Damper by a Polynomial Model. In Proceedings of the 2015 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE), Cuernavaca, Mexico, 24–27 November 2015; pp. 128–133. [Google Scholar]
- Dimock, G.A.; Yoo, J.-H.; Wereley, N.M. Quasi-Steady Bingham Biplastic Analysis of Electrorheological and Magnetorheological Dampers. J. Intell. Mater. Syst. Struct. 2002, 13, 549–559. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C. Simulation of Quarter-Car Model with Magnetorheological Dampers for Ride Quality Improvement. Int. J. Veh. Struct. Syst. 2018, 10, 169–173. [Google Scholar] [CrossRef]
- Fang, Y. Optimal Control of Semiactive Two-Stage Vibration Isolation Systems for Marine Engines. Shock Vib. 2021, 2021, 5334670. [Google Scholar] [CrossRef]
- Maharani, E.T.; Ubaidillah, U.; Imaduddin, F.; Wibowo, W.; Utami, D.; Mazlan, S.A. A mathematical modelling and experimental study of annular-radial type magnetorheological damper. Int. J. Appl. Electromagn. Mech. 2021, 66, 543–560. [Google Scholar] [CrossRef]
- Han, Y.; Dong, L.; Hao, C. Experimental analysis and mathematical modelling for novel magnetorheological damper design. Int. J. Appl. Electromagn. Mech. 2019, 59, 367–376. [Google Scholar] [CrossRef]
- Kumar, A. Oscillation Trails on LHB Coach (AC Chair Car) in Palwal-Mathura Section of Central Railway upto a Maximum Test Speed of 180 KMPH on Rajdhani Track Maintained to Strandards Laid Down; Research Designs and Standards Organisation: Lucknow, India, 2000.
- Tupe, A.R. Handbook On Maintenance of Air Brake System in LHB Coaches (FTIL Type); Indian Railways, Centre for Advanced Maintenance Technology: Maharajpur, India, 2013.
- Vishnu, S.; Garg, S.; Singh, S.; Saha, S. Differential parametrization of rail vehicle properties and its impact on hunting. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2023, 28, 09544097231184586. [Google Scholar] [CrossRef]
- Zhai, Z.; Zhu, S.; Yuan, X.; He, Z.; Cai, C. Nonlinear effects of a new mesh-type rail pad on the coupled vehicle-slab track dynamics system under extremely cold environment. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2023, 237, 285–296. [Google Scholar] [CrossRef]
- Dominguez, A.; Sedaghati, R.; Stiharu, I. A new dynamic hysteresis model for magnetorheological dampers. Smart Mater. Struct. 2006, 15, 1179–1189. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Quast, P.; Kaspari, D.C.; Sain, M.K. Implementation of an Active Mass Driver Using Acceleration Feedback Control. Comput. Civ. Infrastruct. Eng. 1996, 11, 305–323. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. Modeling and control of magnetorheological dampers for seismic response reduction. Smart Mater. Struct. 1996, 5, 565–575. [Google Scholar] [CrossRef]
- Al-Hmouz, A.; Shen, J.; Al-Hmouz, R.; Yan, J. Modeling and Simulation of an Adaptive Neuro-Fuzzy Inference System (ANFIS) for Mobile Learning. IEEE Trans. Learn. Technol. 2012, 5, 226–237. [Google Scholar] [CrossRef]
- Soni, T.; Das, A.S.; Dutt, J.K. Active vibration control of ship mounted flexible rotor-shaft-bearing system during seakeeping. J. Sound Vib. 2020, 467, 115046. [Google Scholar] [CrossRef]
- Nguyen, S.D.; Choi, S.-B.; Nguyen, Q.H. A new fuzzy-disturbance observer-enhanced sliding controller for vibration control of a train-car suspension with magneto-rheological dampers. Mech. Syst. Signal Process. 2018, 105, 447–466. [Google Scholar] [CrossRef]
- César, M.B.; Barros, R.C. ANFIS optimized semi-active fuzzy logic controller for magnetorheological dampers. Open Eng. 2016, 6, 518–523. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C.; Lee, J.; Jang, H.-L. Numerical and Experimental Analysis of DVA on the Flexible-Rigid Rail Vehicle Carbody Resonant Vibration. Sensors 2022, 22, 1922. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Li, H.X.; Meng, H.D.; Wang, Y. Dynamic characteristics of underframe semi-active inerter-based suspended device for high-speed train based on LQR control. Bull. Pol. Acad. Sci. Tech. Sci. 2022, 70, 4. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| −70,032.9 | −40,703.7 | ||
| 1,182,302.18 | 4,898,875.651 | ||
| 2.621 | −0.00202 | ||
| 26.929 | 0.016387 | ||
| 8.60 | 27.31 | ||
| 4.739 | 7.63 × 10−5 | ||
| 4.791 | −0.00357 |
| Displacement | Voltage (V) | Time Span (s) | |||
|---|---|---|---|---|---|
| GWN (0–2 Hz) | GWN (0–2 Hz) | 10 | 0.0869 | 0.0573 | 0.1136 |
| Control System | Rise Time (ms) | Settling Time (s) | Overshoot | Max. Control Force (N) |
|---|---|---|---|---|
| Passive | 101.32 | 9.4204 | 72.2463 | - |
| PI | 261.69 | 3.53628 | 68.985 | 1075.08 |
| PID | 181.24 | 2.4816 | 52.83054 | 1492.26 |
| Fuzzy | 51.57 | 1.8062 | 36.26511 | 786.42 |
| ANFIS | 11.98 | 1.59203 | 47.906775 | 1394.34 |
| Speed | RMS Acceleration (m/s2) | PRI | |||||
|---|---|---|---|---|---|---|---|
| km/h | Passive | Sa-L | Sa-H | Sa-C | Sa-L | Sa-H | Sa-C |
| 60 | 0.29 | 0.28 | 0.27 | 0.26 | 3.45 | 7.14 | 11.11 |
| 120 | 0.35 | 0.32 | 0.32 | 0.31 | 8.57 | 9.37 | 12.50 |
| 180 | 0.47 | 0.43 | 0.41 | 0.38 | 8.51 | 13.95 | 21.95 |
| 240 | 0.56 | 0.53 | 0.51 | 0.49 | 5.36 | 9.43 | 13.73 |
| 300 | 0.60 | 0.56 | 0.55 | 0.47 | 6.67 | 8.93 | 23.64 |
| Speed | RMS Displacement (mm) | PRI | |||||
|---|---|---|---|---|---|---|---|
| km/h | Passive | Sa-L | Sa-H | Sa-C | Sa-L | Sa-H | Sa-C |
| 60 | 2.89 | 2.84 | 2.80 | 2.74 | 1.73 | 3.17 | 5.36 |
| 120 | 3.05 | 3.01 | 2.92 | 2.78 | 1.31 | 4.32 | 9.25 |
| 180 | 3.22 | 3.01 | 2.78 | 2.68 | 6.52 | 14.62 | 19.42 |
| 240 | 3.35 | 3.12 | 2.98 | 2.71 | 6.87 | 11.86 | 21.48 |
| 300 | 3.90 | 3.44 | 3.15 | 2.89 | 11.79 | 21.80 | 32.06 |
| Speed | Ride Quality | PRI (Ride Quality) | |||||
|---|---|---|---|---|---|---|---|
| km/h | Passive | Sa-L | Sa-H | Sa-C | Sa-L | Sa-H | Sa-C |
| 60 | 1.48 | 1.38 | 1.32 | 1.29 | 6.76 | 11.59 | 14.39 |
| 120 | 1.74 | 1.64 | 1.63 | 1.59 | 5.75 | 6.71 | 9.20 |
| 180 | 1.96 | 1.84 | 1.79 | 1.68 | 6.12 | 9.24 | 15.64 |
| 240 | 2.09 | 1.87 | 1.74 | 1.56 | 10.53 | 18.72 | 30.46 |
| 300 | 3.26 | 2.93 | 2.74 | 2.41 | 10.12 | 17.75 | 31.02 |
| Speed | Ride Comfort | PRI (Ride Comfort) | |||||
|---|---|---|---|---|---|---|---|
| km/h | Passive | Sa-L | Sa-H | Sa-C | Sa-L | Sa-H | Sa-C |
| 60 | 2.44 | 2.39 | 2.31 | 2.21 | 2.05 | 5.44 | 9.96 |
| 120 | 2.60 | 2.42 | 2.22 | 1.99 | 7.13 | 15.98 | 27.67 |
| 180 | 2.61 | 2.36 | 2.27 | 2.21 | 9.86 | 14.46 | 17.79 |
| 240 | 3.18 | 2.71 | 2.65 | 2.34 | 14.70 | 19.40 | 31.50 |
| 300 | 3.41 | 2.97 | 2.82 | 2.58 | 12.80 | 19.62 | 29.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, S.K.; Sharma, R.C.; Choi, Y.; Lee, J. Modelling and Dynamic Analysis of Adaptive Neuro-Fuzzy Inference System-Based Intelligent Control Suspension System for Passenger Rail Vehicles Using Magnetorheological Damper for Improving Ride Index. Sustainability 2023, 15, 12529. https://doi.org/10.3390/su151612529
Sharma SK, Sharma RC, Choi Y, Lee J. Modelling and Dynamic Analysis of Adaptive Neuro-Fuzzy Inference System-Based Intelligent Control Suspension System for Passenger Rail Vehicles Using Magnetorheological Damper for Improving Ride Index. Sustainability. 2023; 15(16):12529. https://doi.org/10.3390/su151612529
Chicago/Turabian StyleSharma, Sunil Kumar, Rakesh Chandmal Sharma, Yeongil Choi, and Jaesun Lee. 2023. "Modelling and Dynamic Analysis of Adaptive Neuro-Fuzzy Inference System-Based Intelligent Control Suspension System for Passenger Rail Vehicles Using Magnetorheological Damper for Improving Ride Index" Sustainability 15, no. 16: 12529. https://doi.org/10.3390/su151612529
APA StyleSharma, S. K., Sharma, R. C., Choi, Y., & Lee, J. (2023). Modelling and Dynamic Analysis of Adaptive Neuro-Fuzzy Inference System-Based Intelligent Control Suspension System for Passenger Rail Vehicles Using Magnetorheological Damper for Improving Ride Index. Sustainability, 15(16), 12529. https://doi.org/10.3390/su151612529