1. Introduction
In light of the global focus on mitigating global warming and protecting the environment, transportation electrification has emerged as a critical pathway to reducing carbon emissions [
1]. Numerous countries have undertaken efforts to advance transportation electrification. European nations have introduced policies to phase out fossil fuel vehicles and encourage the development of electric vehicles (EVs) [
2]. Similarly, cities in the United States have implemented initiatives such as tax credits and exemptions from emissions testing to promote EV adoption [
3]. The Chinese government has set ambitious targets to peak carbon emissions and achieve carbon neutrality [
4]. In China, policies have been enacted to stimulate the widespread adoption of EVs, providing subsidies not only to consumers but also to manufacturers and operators of charging facilities [
5]. These measures aim to bolster production and enhance the charging infrastructure network.
However, several significant factors hinder the widespread adoption of electric vehicles (EVs). The limited battery range and insufficient charging infrastructure stand out as key obstacles. The restricted driving range of electric vehicles, caused by their relatively low battery capacity, is a practical constraint. Most electric vehicles offer a driving range between 200 and 500 km, with an average of approximately 318 km, whereas conventional fuel vehicles typically have an average range close to 500 km [
6]. Additionally, the scarcity of charging facilities exacerbates the problem. In the United States, for instance, there are approximately 136,000 gas stations compared to only 43,800 electric charging stations [
7]. Consequently, electric vehicle drivers encounter difficulties, particularly during long-haul trips. The insufficiency of charging infrastructure on highways is notable, as most charging facilities are concentrated in urban areas. In China, there is a lack of systematic planning for EV charging facilities on highways compared to urban regions. After assessing the existing charging infrastructure and highway development plans in line with the EU Green Deal regulations for Europe, it becomes apparent that there is still an inadequate development of fast-charging infrastructure for electric vehicles in several regions [
8]. It is crucial to note that the penalty cost for EV users due to the absence of charging facilities on highways is significant.
Existing research in the literature primarily focuses on planning EV charging facilities in urban areas [
9,
10,
11,
12]. Much of this research relies on optimization algorithms or methods to enhance the location and capacity decisions of charging facilities [
13,
14,
15,
16]. However, the research largely centers on commuting trips in urban areas. Nonetheless, researchers have identified distinct travel patterns between commuting trips and long-haul trips [
17,
18,
19,
20,
21,
22]. An algorithm has been developed to select highway charging facilities, which entails an analysis of the actual highway system (such as E18 in Norway) along with its traffic requirements, including the proximity to medium-voltage substations [
23]. Using the Flow-Refueling Location Model (FRLM) and making use of an extensive dataset that provides insights into traffic patterns across the European highway network, this approach simplifies the process of identifying the optimal count of fast-charging stations needed along the highway network [
24]. Moreover, a framework is formulated to facilitate high-power fast charging for battery electric vehicles (BEVs) intended for public use. This framework integrates easily available traffic count data as the input and combines these data with on-site queuing models. When applied to Germany, it leads to the creation of a fast-charging network where the average waiting time remains below 5 min [
25]. On a highway scenario, the influx of EV drivers from different entrances and their decisions regarding which charging station to utilize determine the usage of charging facilities on the highway. These travel and charging behaviors are difficult to capture using the existing models designed for urban scenarios.
In contrast, a multi-agent simulation model serves as a valuable tool to capture the dynamic behavior of EV users on highways. Transportation simulation has traditionally been used to model transportation systems, aiding in planning, designing, and operating such systems [
26] and thus providing accurate simulations of single-driver travel patterns. While macroscopic four-step models may lack person- and vehicle-specific details, and microscopic simulations may be too detailed for large-scale scenarios [
27,
28], agent-based simulation models can provide activity-based simulations from a mesoscopic perspective. This enables investigators to create simulation models at the city or nationwide scale, offering highly detailed data on individuals [
29,
30]. The model can simulate how drivers’ charging demands emerge and how they conduct their travels. Moreover, all relevant vehicle and station information can be configured as input files before simulation, allowing for the evaluation of accurate data regarding any driver or charging station.
The overall travel time greatly influences user experience and plays a vital role in transportation planning. However, prevailing location studies often disregard the holistic assessment of entire travel itineraries, thereby overlooking the impact of total travel time on user satisfaction. This study undertakes a comprehensive evaluation of location strategies by comparing total travel time with waiting time for charging. Traditional multi-agent traffic flow simulation software is predominantly geared towards transportation planning. Nonetheless, multi-agent simulation models uniquely replicate travel and charging decision making, addressing the limitations of relying solely on mathematical models for determining charging station locations. This modeling approach excels in analyzing diverse layouts of charging stations and optimizing the process. Thus, this paper establishes a multi-agent simulation model to capture traveling and charging behaviors on highways. Based on this model, optimal planning strategies for EV charging facilities on highways can be evaluated. The paper discusses both the greenfield development of EV charging facilities and the expansion of existing charging infrastructure. The subsequent sections are organized as follows:
Section 2 delves into the multi-agent simulation model, while
Section 3 applies the established model to assess existing charging facilities on a real highway section in China.
Section 4 discusses the optimal planning strategy for EV charging facilities on highways, followed by
Section 5, which addresses the planning method for expanding the existing charging network. The paper concludes in
Section 6.
2. Simulation Model
In this study, we utilize the open-source multi-agent modeling framework MATSim to develop the simulation model. MATSim is widely employed in transportation simulation and offers reliable results by simulating agents’ rational and independent travel decisions [
31]. The core principle of MATSim is the co-evaluation algorithm, where agents navigate a shared network system and compete for limited transportation resources, specifically the charging facilities on the highway. Each agent continually improves their travel plans by selecting the option with the highest utility value, until no unilateral optimization is possible and the system reaches equilibrium.
The MATSim process consists of several iterations, including initial demand, mobility simulation, scoring, replanning, and analysis. Initial travel demands of agents serve as the starting point for the simulation. These demands are expressed as travel plans, specifying origin–destination points and typical activity durations. Prior to the mobility simulation, initial routes for each EV driver are calculated based on their initial plans, and agents are distributed across the network accordingly. To enhance simulation efficiency, the path-planning algorithm employs the A* search algorithm enhanced with landmarks and the triangle inequality, frequently referred to as the ALT algorithm. The mobility simulation operates on queue theory, treating each road as a queue. Only when a vehicle reaches the end of a road’s queue can it proceed to the next road, emulating the movement between roads. Within the traffic flow model of the MATSim framework, pivotal parameters encompass the storage capacity and flow capacity of road segments. Storage capacity denotes the highest quantity of vehicles that the queue of the present road segment can hold, determined by the length of the longest queue. Flow capacity signifies the number of vehicles capable of departing from the ongoing road segment within the same time step.
Following the mobility simulation, scores are calculated based on travel performance. Scores are assigned based on the assumption that completing a mission yields a positive score, while time spent in traffic or charging an electric vehicle incurs a negative or zero score [
32]. In MATSim, utility scores are calculated by summing up the utility of all activities and travel during a user’s travel process.
In Equations (1) to (3), represents the utility of completing activity q; is the penalty for arriving later than the start time of activity q; mode(q) refers to the user’s travel mode, with all travel modes in this study being driving modes; is a constant associated with the current travel mode; is the marginal utility of travel time for the current travel mode; is the travel time from activity location q to q + 1; is the marginal utility of travel distance for the current travel mode; and is the travel distance from activity location q to q + 1.
Additionally, a subset of the population undergoes replanning of their daily activities. The analysis section generates output files containing events organized by time and location. After the production of output files and score calculation, MATSim proceeds to the next iteration. The simulation process concludes after a predetermined number of iterations.
Notably, simulating charging demands is a crucial aspect of the model. The algorithms replicate the generation of charging demands and the decision-making process for selecting charging locations. Before an agent proceeds to the next road segment, a comparison is made between the remaining battery capacity and the total energy required to complete the segment. If the remaining battery is insufficient, a charging demand is generated at the end intersection of the current road. Otherwise, the agent continues driving. The selection of charging stations follows the principle of proximity.
Figure 1 illustrates a snapshot of MATSim.
MATSim necessitates specific input files to execute the simulation successfully. These crucial input files encompass the initial plans of all agents, a comprehensive network file containing nodes and links, and supplementary information. To accurately simulate the travel and charging patterns of electric vehicle drivers, additional details regarding the configuration of electric vehicles and charging plugs are incorporated into the model.
First and foremost, the transport network serves as the conduit for agents to navigate during the simulation and is thus indispensable. It primarily encompasses information pertaining to roads and nodes. Node information entails the coordinates of road intersections, while road information encompasses traffic capacity, free speed, and slope. Typically, suitable network data are derived from OpenStreetMap (OSM) [
33]. OpenStreetMap (OSM), acknowledged as a pivotal source of global-scale GIS data, is frequently utilized, mainly for its transport network dataset. This preference stems from the heightened accuracy and real-time updates of OSM’s transport network data, making it directly applicable for research focused on urban transportation and accessibility across intermediate to small spatial scales [
34].
Furthermore, the initial travel plans of all agents are crucial for the MATSim model. These initial plans determine the daily activity chain of each agent. The study area is partitioned into several traffic zones, and the flows between them are weighted by the resident population. The penetration rate of electric vehicles is factored in to calculate the traffic flows of electric vehicles. Moreover, based on travel surveys, two activity chains are observed during long-haul trips: “home-work” and “home-work-home.” By leveraging the traffic flows between zones and the proportion of these two distinct long-haul travel patterns, the initial travel plans of all agents can be generated.
The initial State of Charge (SoC) for each vehicle is set to follow a normal distribution between 50% and 100%. Regarding electric charging plugs, they are configured as direct-current (DC) fast-charging plugs with a maximum charging power of 120 kW. The number of plugs in each charging station varies across different scenarios. A variable charging speed procedure is introduced to mimic real-life charging behavior, where the charging speed fluctuates based on the remaining State of Charge (SoC). In the electric vehicle extension of MATSim, the charging model for charging plugs is defined as follows: 1.75 C between 0% and 50% SoC, 1.25 C between 50% and 75% SoC, and 0.5 C between 75% and full charge [
35]. As for the scoring model, agents are inclined to minimize the time spent on charging while on the highway, as it diminishes their utility. Consequently, agents strive to charge the minimum amount of energy necessary as long as the remaining energy is sufficient to reach their destination.
3. The Base-Case Study
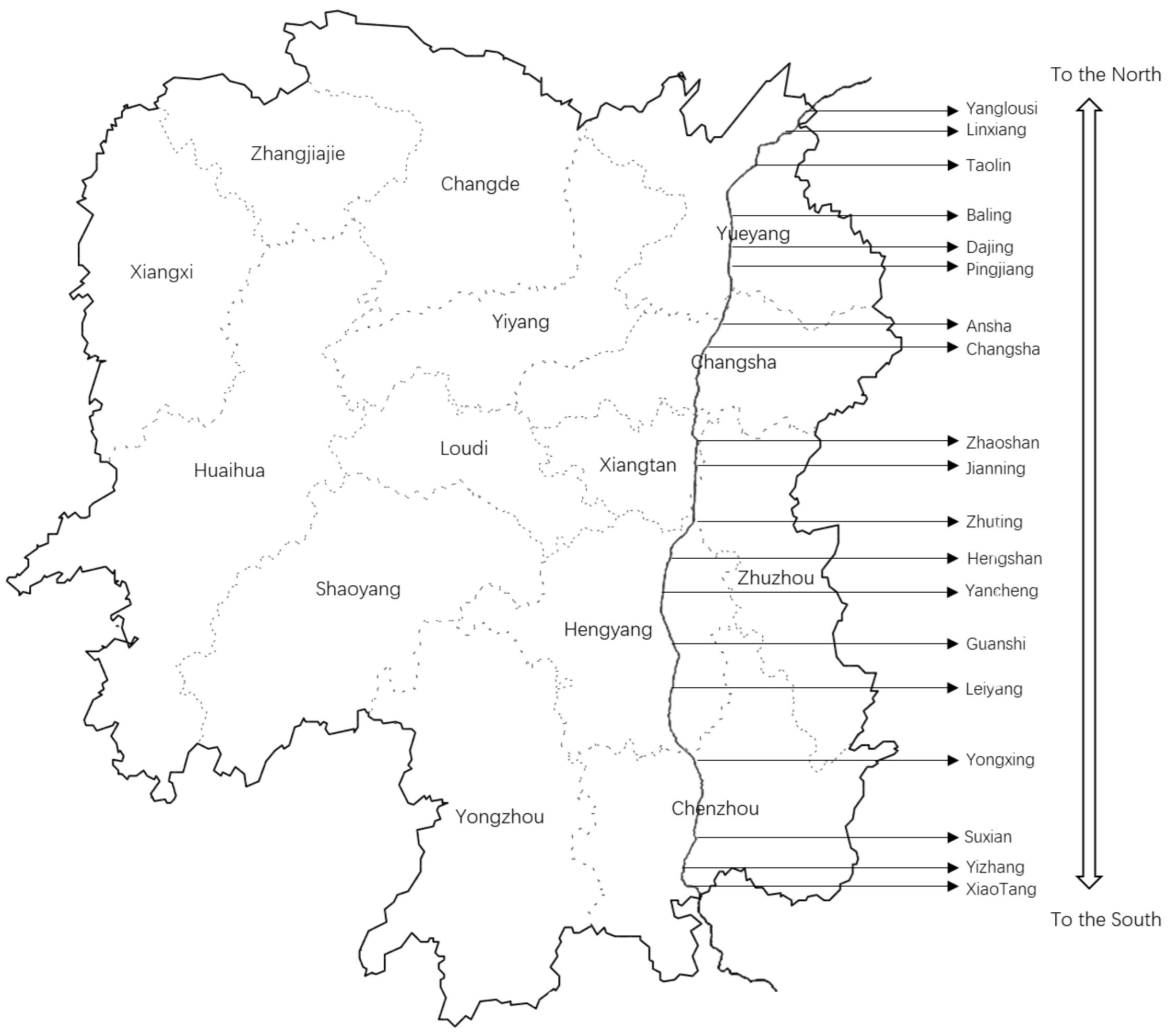
The focus of this study is the Beijing–Hong Kong–Macao (B-HK-M) highway system, which spans over 2200 km. For the purpose of this research, the section of the highway located within Hunan Province has been chosen. This particular section is of interest due to its significant length and its position within the overall highway system. Furthermore, it is worth noting that the B-HK-M highway experiences high traffic volumes, with daily flows exceeding 60,000 vehicles. This substantial and regular transportation activity offers an excellent sample for analyzing the layout planning of charging stations within the highway system. To provide context,
Figure 2 illustrates the existing highway network and service areas associated with the B-HK-M highway system.
Data Inputs
To build the MATSim simulation model, specific input files need to be prepared as discussed earlier. The network file is generated by exporting data from the OpenStreetMap (OSM) system, specifically focusing on the B-HK-M highway system in Hunan Province. By setting the longitude and latitude values of Hunan Province in OSM, all roads within the selected area are extracted. For simplicity and improved efficiency, some shorter roads are combined into longer ones in the network file.
The synthetic population, representing the initial travel plans, is another essential component. Since the study area is the B-HK-M highway system in Hunan Province, the traffic zones align with the administrative divisions of the cities in Hunan Province. There are a total of 14 traffic zones. Using traffic flow data from the Hunan Provincial Department of Transportation and resident population data from the 2022 census, the traffic flow between traffic zones can be generated. Taking into account the penetration rate of electric vehicles in China, an Origin–Destination Traffic Flow Matrix for electric vehicles was created. Long-haul trips are defined as round trips over 300 km, and travel chains are set as “home-work” or “home-work-home” based on travel surveys. Subsequently, the synthetic population, representing the initial plans of all agents, was generated. Electric vehicles in the model have a battery capacity of 50 kWh, and the charging power of plugs is set at 120 kW.
As part of the base-case analysis, the constructed MATSim model simulates the performance of the existing charging facilities on the highway. The simulation results are presented in
Table 1.
The first column in
Table 1 is the service areas in the highway system where the charging facilities are usually built. There are still some service areas where no charging station has been built yet, and they are marked with “/”. The sub-columns under the different directions are the simulation results based on the actual existing charging network and the synthetic population. The first sub-column under the different directions shows the existing number of charging plugs in each location. Except for the charging station located in the Zhaoshan service area, the other charging stations are equipped with two to six charging plugs, while most charging stations are equipped with four plugs.
From the results, it can be seen that the service level varies significantly among different charging stations. The highest average occupancy rate is in the charging station located in the Leiyang service area in the southern direction, 68%, followed by the charging station at Jianning. The high occupancy rate means higher charging demands, leading to longer queue time. The average waiting time at Leiyang is 552.1 s (9.2 min) and is 291.8 s at Jianning (4.9 min). On the other hand, some of the charging stations are underutilized, leading to no waiting time at all.
The uneven utilization levels of the existing charging stations on the highway suggest that there is a lack of a reliable planning approach for the charging facilities. By intuition, the distribution of charging demands on the highway may be attributed to the population distribution and the travel demands along the highway. For example, the high charging demands in the Leiyang charging station mainly come from southbound travel demands towards Chenzhou city or further Guangdong Province, originating from the population in the Changsha–Zhuzhou–Xiangtan City Group. The Changsha–Zhuzhou–Xiangtan City Group makes up over 25% of the overall population and is the biggest city group in Hunan Province, contributing to frequent cross-city or cross-province travels. The frequent cross-city travels also explain the high charging demands in the Jianning charging station, which lies in the center part of the city group. In addition, the other part of the high electric charging demands at the Jianning station also comes from the southbound trips from cross-province trips from Hubei Province or cross-city trips from the northern cities in Hunan Province, such as Yueyang.
The multi-agent transportation simulation model serves as an effective tool to synthesize the traffic demand of the vehicles on the highway and the charging behaviors of the EV users on the highway. Thus, the charging demands on the highway can be simulated and analyzed and served as the basis for evaluating the development options of the EV charging facilities.
4. Planning Strategies for Greenfield Development
The previous analysis indicates that the current investment in existing charging facilities on the highway may not be optimized in terms of service level. The overall investment cost primarily relies on the total number of charging plugs. Presently, there are 108 charging plugs installed along the studied highway. One might question how these charging facilities (plugs) should be strategically allocated in different locations on the highway to maximize the service level for EV users while maintaining the same investment.
To address this question, we aim to compare different planning strategies: the “Dispersed” strategy, where limited charging facilities are distributed across various locations with a few plugs in each; the “Centralized” strategy, which concentrates the charging facilities in a few locations; and the “Mixed” strategy, which involves a tradeoff between the number of stations and the number of charging plugs at each station.
In this analysis, we consider the hypothetical scenario where no existing charging plugs are present on the highway. We allocate 108 charging plugs, equivalent to the current number of charging plugs, across ten different charging facility plans, as outlined in
Table 2. These plans involve varying plug allocations across different numbers of locations.
Of all the plans, S1 to S3 may be considered as “Dispersed” plans. For example, in S1, 36 stations are built, each equipped with only three plugs. The “Dispersed” plans aim to provide a wide coverage of the charging network, ensuring that EV users can always find a nearby station. On the other hand, S8 to S10 are considered “Centralized” plans, where a majority of the plugs are concentrated in a few stations. S4 to S7 are categorized as “Mixed” plans, which strike a balance between the two extreme strategies by considering both the number of stations and the number of plugs at each station. It is important to note that the selection of stations is based on the rank of the average occupancy rate of each station in the existing scenario, as determined in the previous results.
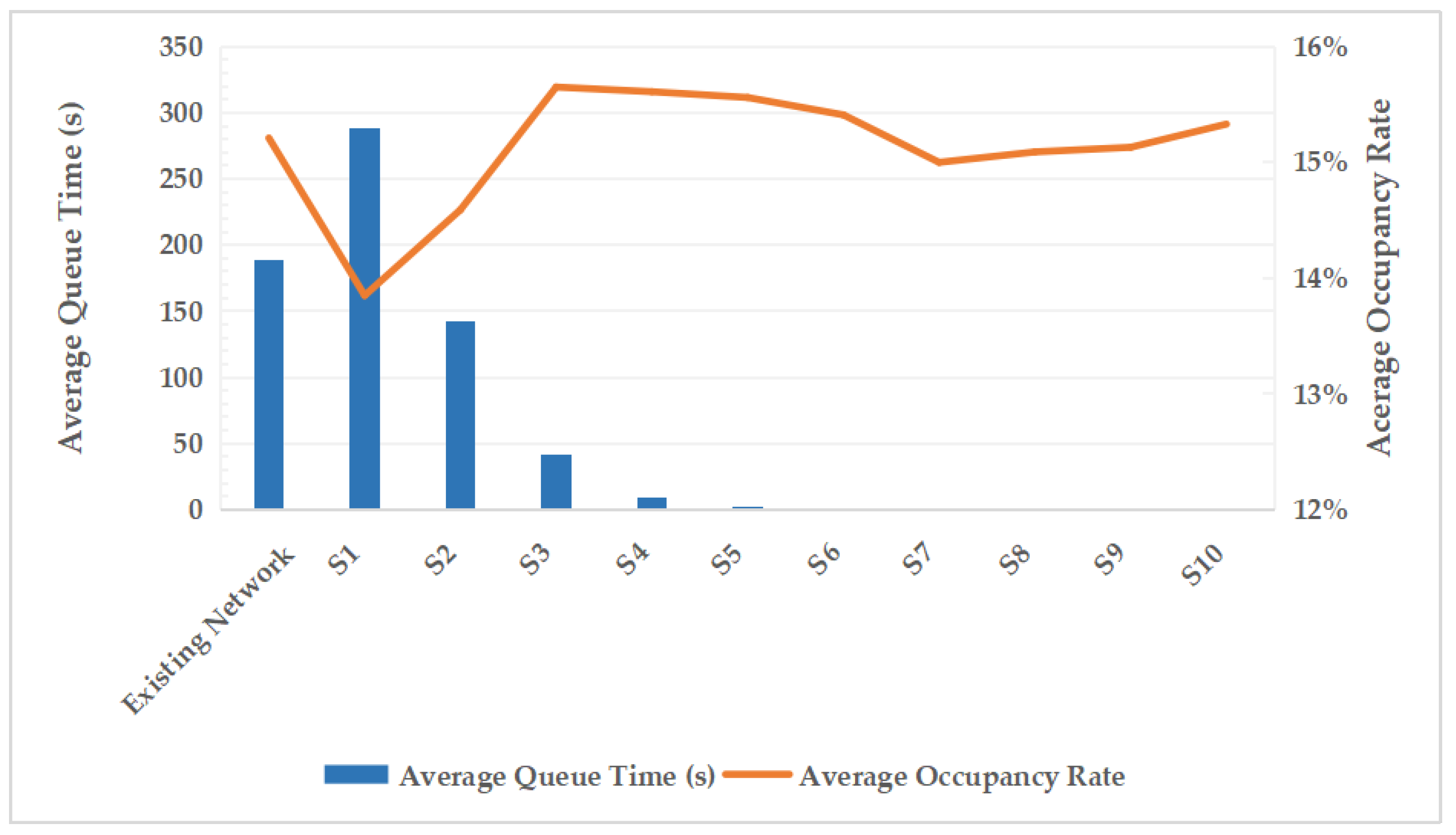
All the charging facility plans were implemented in the simulation model, and the results were obtained by running the model.
Figure 3 presents the average queue time spent at charging stations and the average occupancy rate of all charging stations. Comparing these results to the existing scenario, it can be observed that although “Dispersed” plans cover most areas in the highway system, the scarcity of charging resources leads to longer queue times for drivers. Due to the large number of stations with a limited number of plugs in S1, both the average queue time and occupancy rate are higher than in the existing scenario. In “Centralized” scenarios, charging resources are concentrated in fewer stations. Sufficient charging resources at each station allow agents to charge upon arrival, resulting in no queue time for EV drivers.
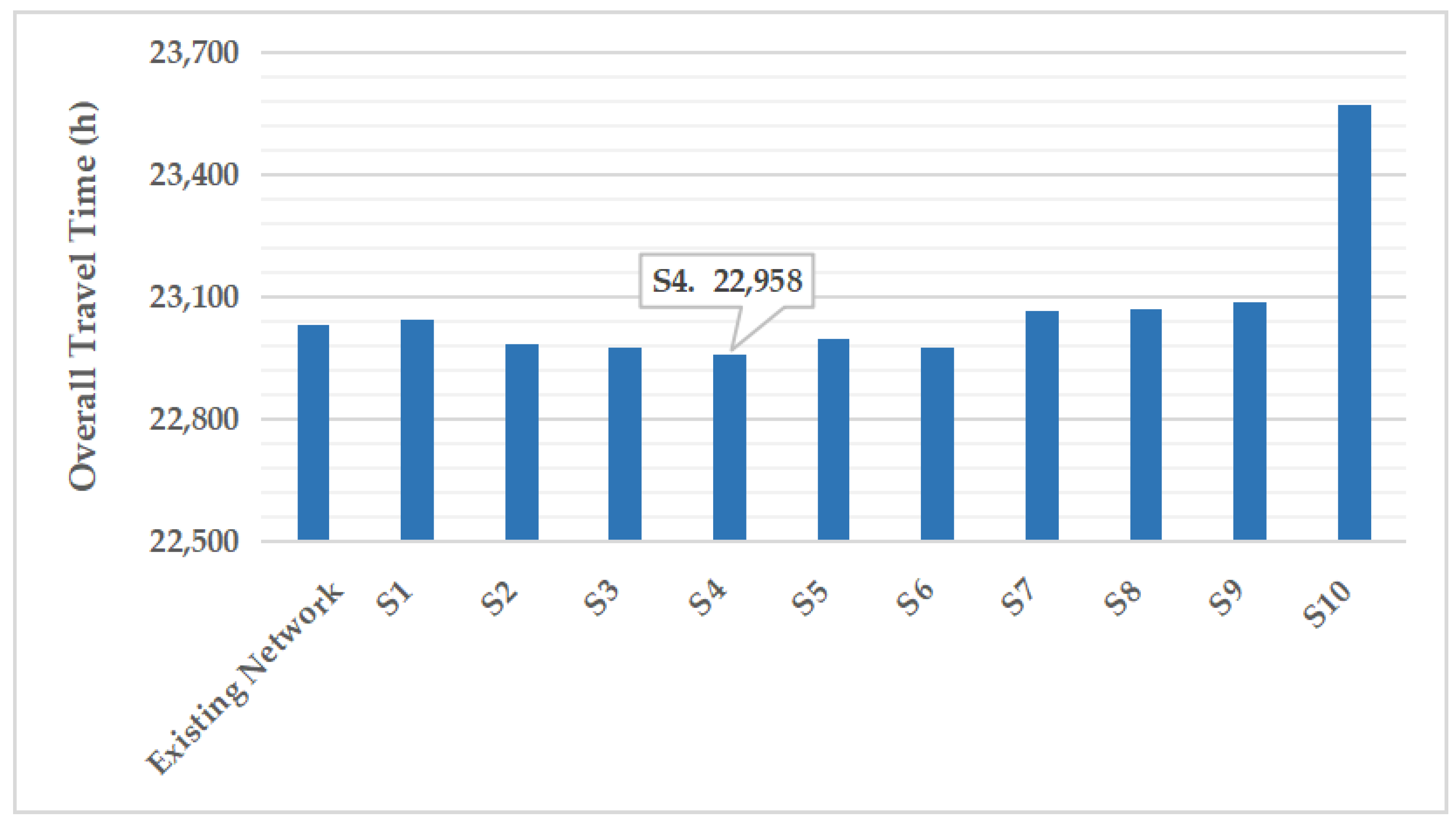
Figure 4 displays the total travel time of all agents under different planning plans. The overall travel time includes time spent on driving, queuing at charging stations, and actual charging time. The results show that S4, where 12 charging stations are constructed with nine charging plugs each, achieves the smallest overall travel time. When faced with “Dispersed” plans, drivers can charge their vehicles at nearby charging stations at a lower cost, leading to shorter travel times. In “Centralized” plans, drivers are more likely to detour to a charging station, increasing travel distances and extending travel times. In highly “Centralized” scenarios, such as S10, where only one station is present in the network, drivers have to deviate significantly from their planned routes to reach the station, resulting in significantly longer travel times and distances.
The results demonstrate that neither the “Dispersed” plans nor the “Centralized” plans yield the best performance in terms of total travel time. The “Dispersed” plans reduce travel time to nearby charging stations but increase queue times at the stations. Conversely, “Centralized” plans minimize queue times at charging stations but require drivers to travel longer distances to find a station. The optimal planning strategy involves striking a balance between the number of charging stations and the number of plugs at each station. It is advisable to centralize more charging resources in stations with higher demands, while keeping the number of charging stations within a reasonable range to avoid unnecessary detours.
5. Planning Method for Charging Network Expansion
This section focuses on analyzing the planning methods for the expansion of the existing charging network on a highway. We agree that the expansion of the charging station network has multifaceted implications, including its impact on the supply capacity of charging stations within distinct zones and its enhancement of the user friendliness of the charging process. These factors collectively influence the purchasing behavior of potential electric vehicle buyers [
36]. Our focus in this section is to address the continued growth of electric vehicles and to propose an expansion strategy that builds upon the existing charging network. By doing so, we aim to effectively accommodate the projected surge in future charging demand, strategically selecting optimal deployment sites for additional charging stations and evaluating the necessity of introducing charging infrastructure in currently underserved areas. Ultimately, our overarching goal is to elevate the overall user experience during travel. The analysis is conducted as follows: Each of the 38 charging stations on the highway has the potential to accommodate an additional charging plug, resulting in 38 different expansion plans. These plans are then inputted into simulation models, and an evaluation is performed among the 38 simulation models. The total social cost for a period of 20 years is calculated, taking into account the travel time cost for all agents and the expenses associated with facility construction.
It is important to note that although there are 38 alternative locations for charging stations, not all of them have been implemented yet. Among the 38 alternative charging station plans, the one with the lowest total social cost is selected as the optimal expansion plan for the current plug. Based on this optimal plan, the 38 plans for the next additional plug are generated. This iterative process continues until the total social cost can no longer be reduced by adding charging plugs, indicating the completion of the expansion process. The calculation of the total social costs is outlined below.
where C
1 represents the unit construction expense of a charging station on the highway, incurred when a plug is added to a new charging station. C
2 represents the unit price of charging plugs in each station. C
3 represents the time cost per agent per hour, while representing the overall travel time of all agents; r
0 represents the discount rate and represents the upper limit years of a charging station.
For the purpose of this analysis, the discount rate was set at 3%, and the evaluation period was determined to be 20 years. Based on a comprehensive cost investigation, the unit construction expense for a new charging station was determined to be CNY 4 million, and the expense for a new charging plug was set at CNY 100 thousand [
37]. The time cost per person per hour was estimated to be CNY 44, based on average salary level data from the Bureau of National Statistics of China [
38].
The optimal expansion plan, as determined through the analysis, is presented in
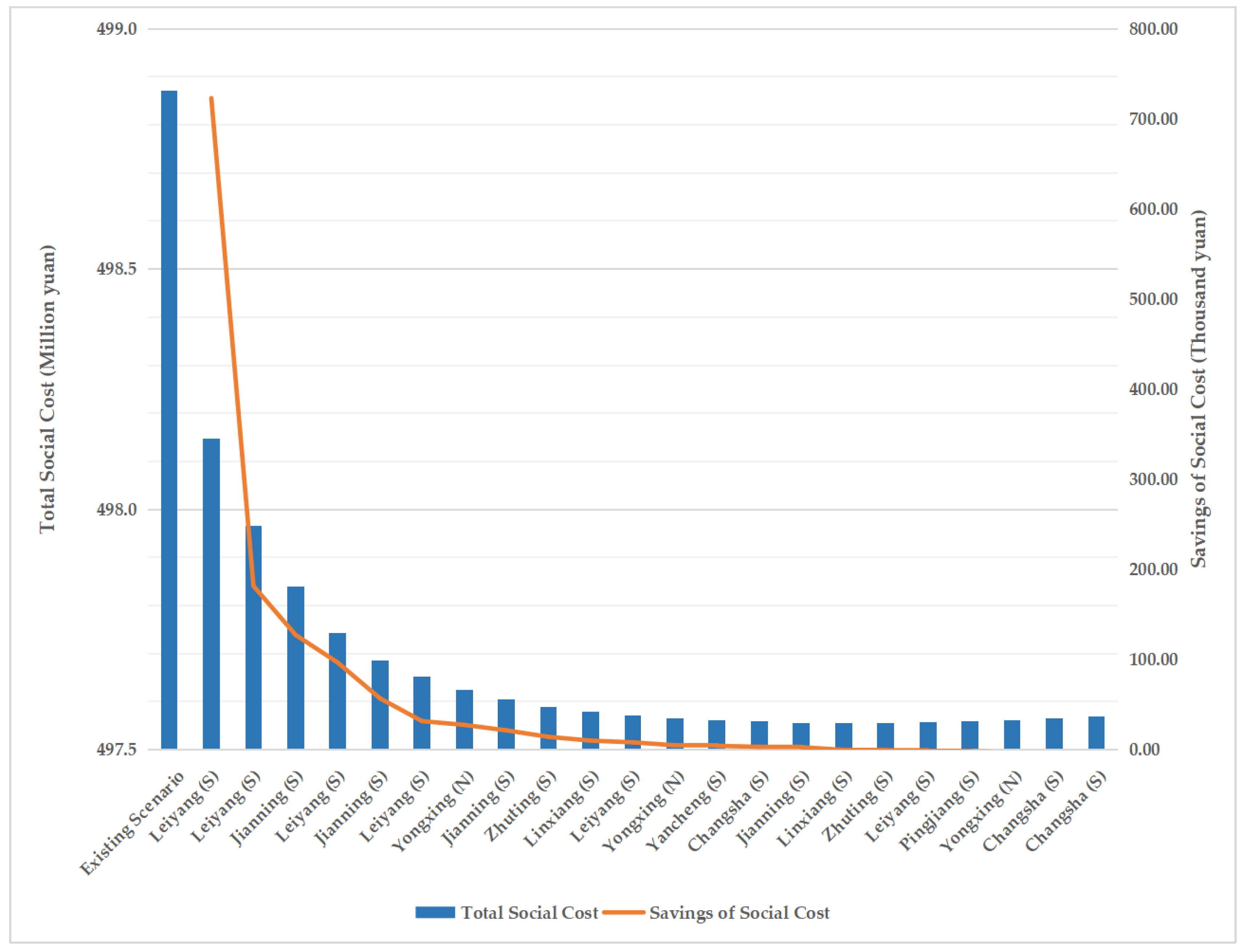
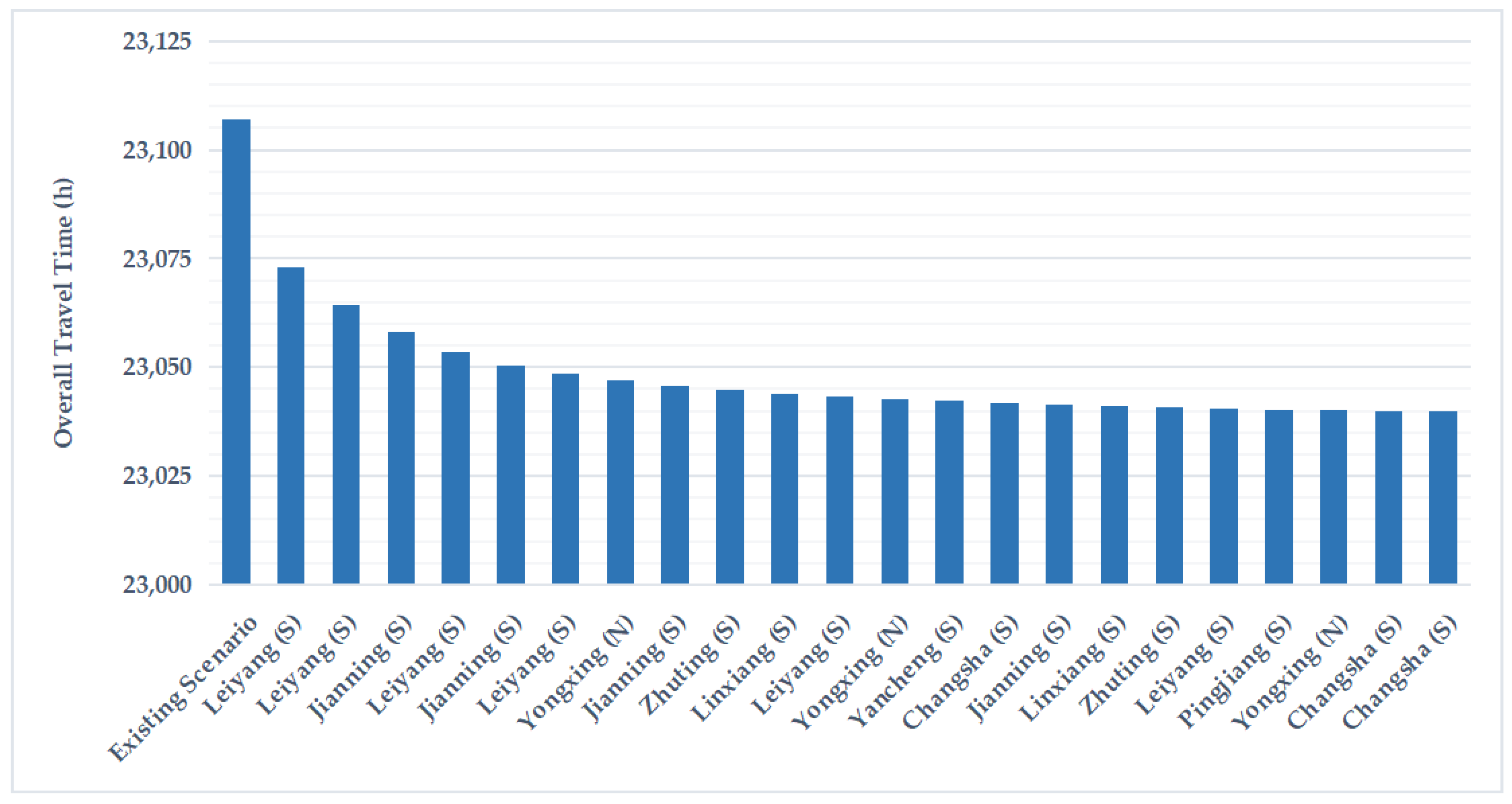
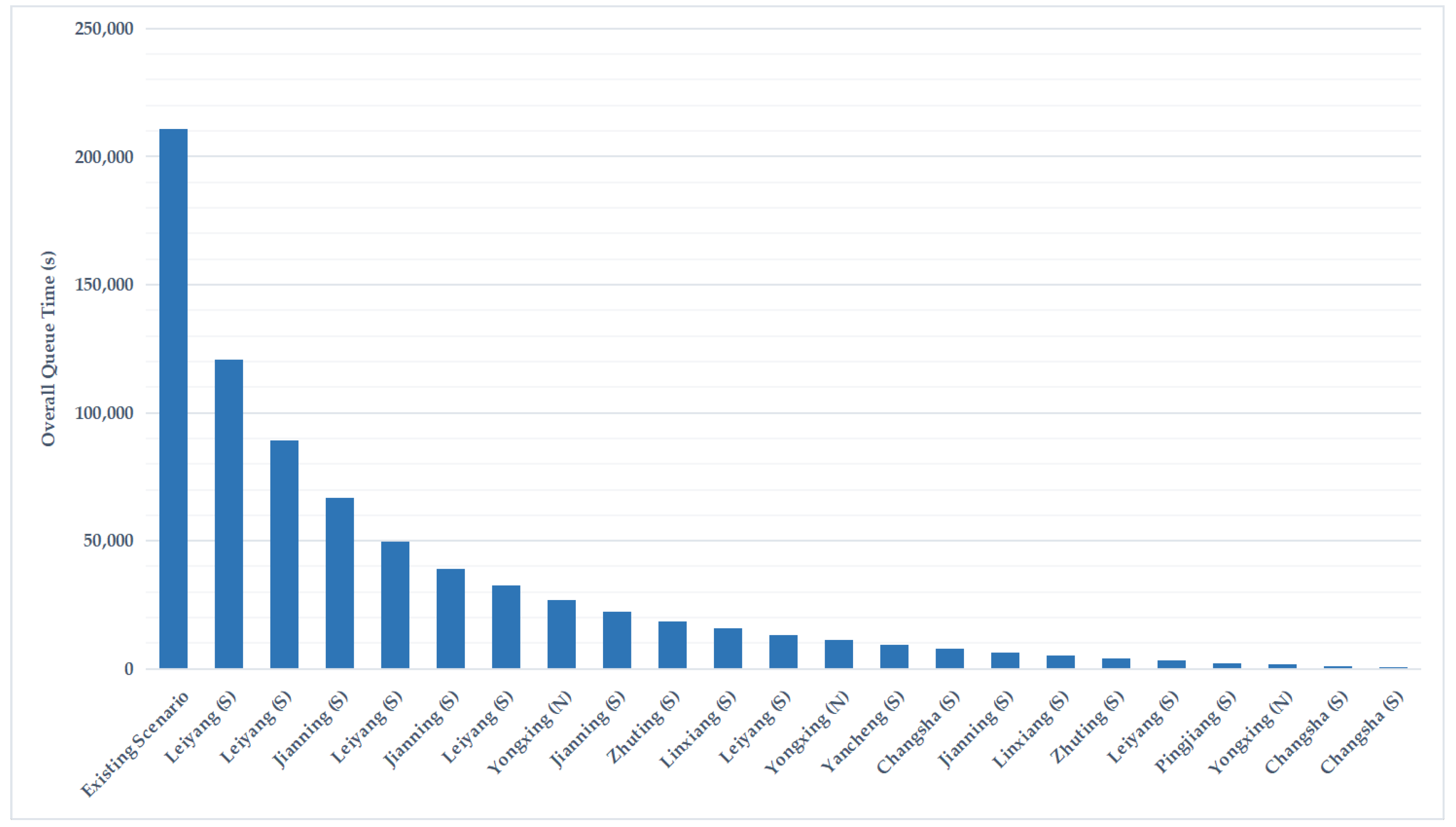
Table 3. The results indicate that the addition of 15 charging plugs to the existing charging network would lead to a reduction in the total social cost. However, adding a 16th plug would result in the increase in the total social cost, showing that the savings on time cost cannot offset the investment and operation costs.
Out of the 15 additional charging plugs, 9 will be installed at the Leiyang and Jianning stations, which are situated in the southbound direction of the road and have the highest occupancy rates based on the previous analysis. The optimal expansion strategy aims to minimize the total social cost by prioritizing the centralization of additional charging resources in stations with high charging demands, thereby expanding their charging capacity. It is important to note that one plug will be installed at the location where no station has been built yet, which incurs a fixed construction cost for establishing a new charging station.
Figure 5,
Figure 6 and
Figure 7 depict the trends in social cost, travel time, and queue time as each additional plug is built in the existing charging network. The graph illustrates a decreasing pattern in the savings of total social cost, highlighting the diminishing returns of adding extra plugs. These results are valuable in identifying the most promising locations for limited plug installations, particularly when investment costs are constrained.
6. Conclusions
A multi-agent simulation-based approach is established in this paper for the planning of electric vehicle (EV) charging facilities on a highway. This approach addresses the inherent limitations of traditional site selection methods by accurately modeling user charging behaviors and decision-making processes related to charging and enables the simulation and analysis of EV users’ travel activities and charging behaviors on the highway. The model is applied in the planning of charging facilities along the B-HK-M highway segment in Hunan Province, China.
The base-case analysis reveals that the existing charging facilities are inadequately planned, with some stations being heavily utilized while others are underutilized. Further analysis demonstrates that neither the “Dispersed” strategy nor the “Centralized” strategy is suitable given the limited investment resources. The former leads to long queue times at each station, while the latter results in significant detours for EV drivers. Instead, the optimal planning strategy is the “Mixed” approach, which strikes a balance between the number of stations and the number of plugs at each station.
Unlike current charging networks, given the swift rise in the number of electric vehicles, we expand the existing charging network. The established multi-agent model is utilized to determine the optimal quantity and placement of additional plugs to the existing network. The assessment of plans takes into account the total social costs, including facility costs and time costs, with the aim of minimizing overall expenses. This model introduces a novel approach to investigate strategies for designing highway charging networks, thereby broadening the potential applications of multi-agent traffic flow simulation models.
However, it is important to acknowledge some limitations of this study. The established model assumes that EV drivers on the highway always charge their cars at the highway’s charging facilities. In reality, drivers may exit the highway to access nearby charging facilities and return to the highway after charging. Incorporating such complexity into the model poses challenges, as the decision to use a charging facility outside the highway depends on various factors such as urgency, distance, and additional tolls. Future research should consider these factors and assess their potential impacts on highway charging facilities. Moreover, it is important to acknowledge that the depiction of users’ charging decision-making processes in current simulation models is somewhat limited. Exploring ways to incorporate real-time queue lengths at individual charging stations into users’ charging decisions and station selection logic could enhance the model’s fidelity to real-world dynamics.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}