

Optimal Design of the Proton-Exchange Membrane Fuel Cell Connected to the Network Utilizing an Improved Version of the Metaheuristic Algorithm

Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.3. Contribution of the Study
- An enhanced grid-connected power quality in PEM fuel cells through the proposed technique;
- The utilization of a modified model of the metaheuristic algorithm, the modified pelican optimization (MPO) algorithm for the optimization of the controller design;
- The demonstration of the superiority of the proposed technique over other recent approaches, through a comparison study;
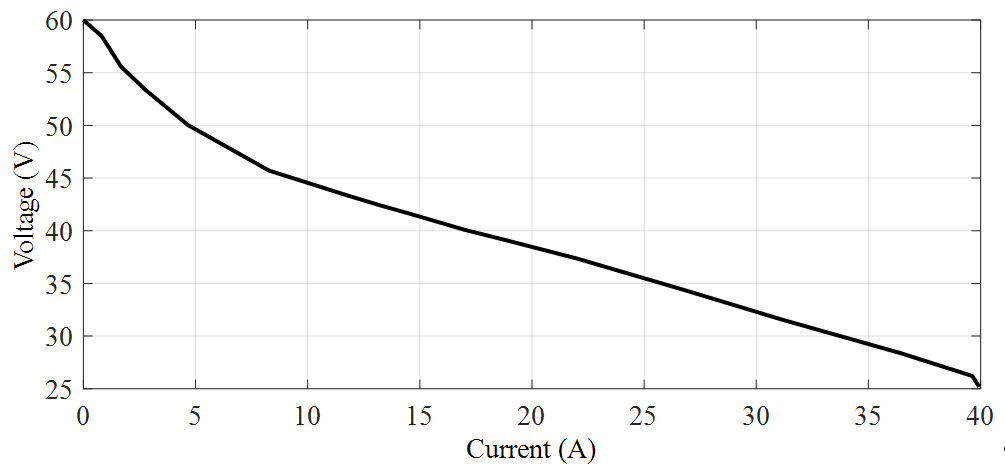
- Understanding the current–voltage relationship in PEMFCs, and its implications for designing an optimized control strategy;
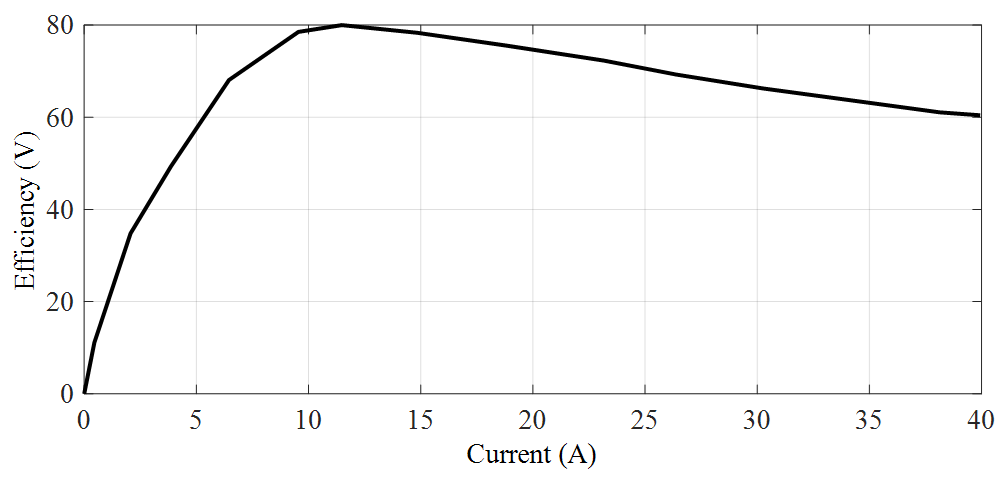
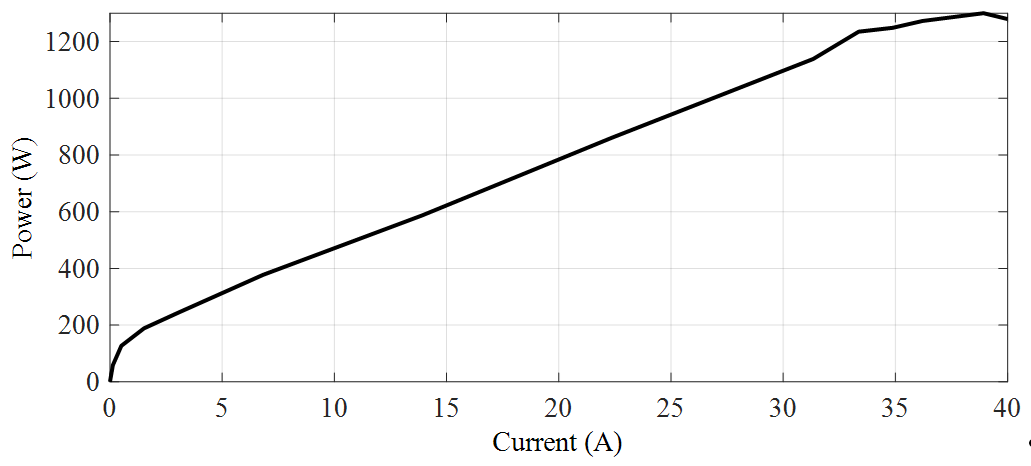
- An impressive efficiency (60.43%) and significant output power in the PEMFC under specific operating conditions;
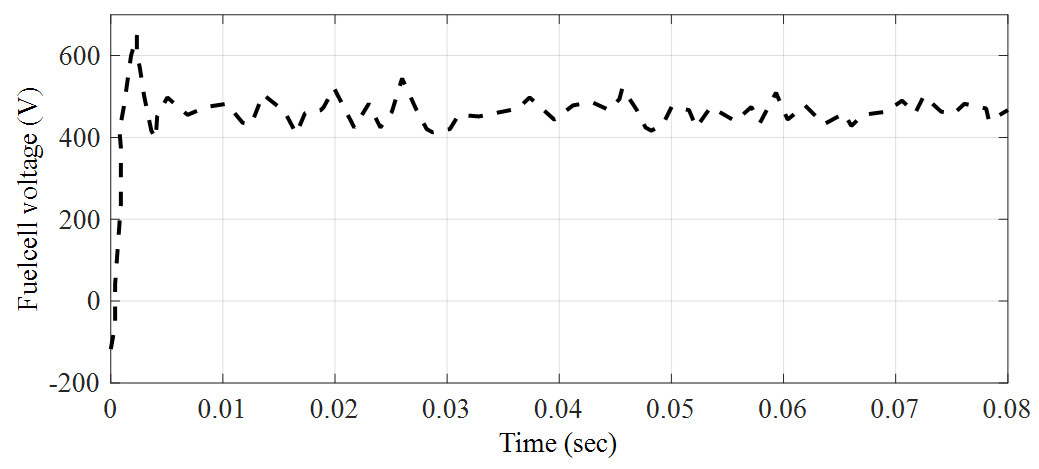
- The robustness of the MPO-based controller in maintaining the fuel cell voltage near its rated value, even during sagging events;
- The superior accuracy of the MPO algorithm in maintaining the voltage stability across various operating conditions.
2. System Modeling
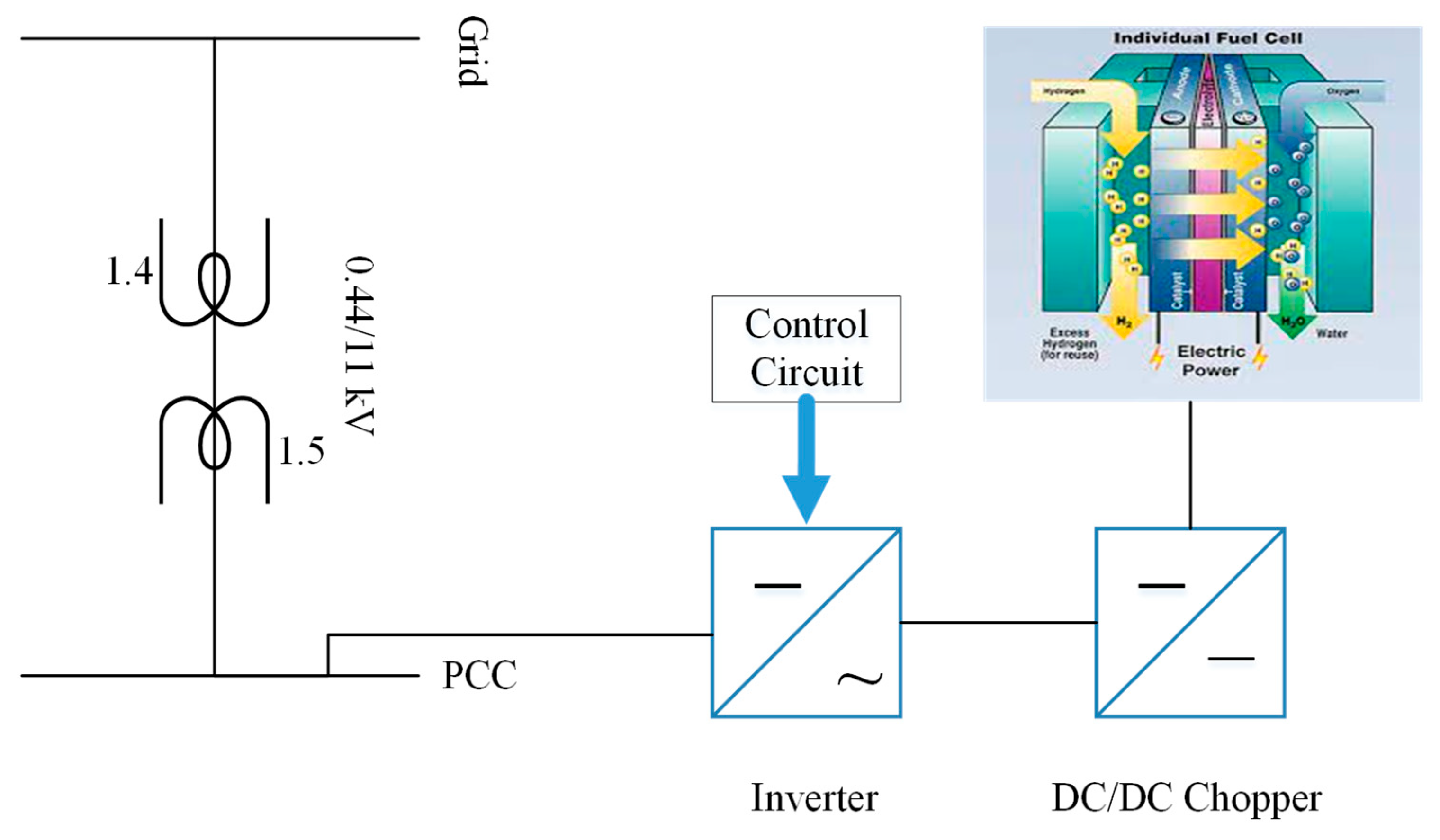
2.1. The Main Structure
2.2. Model of the PEMFC
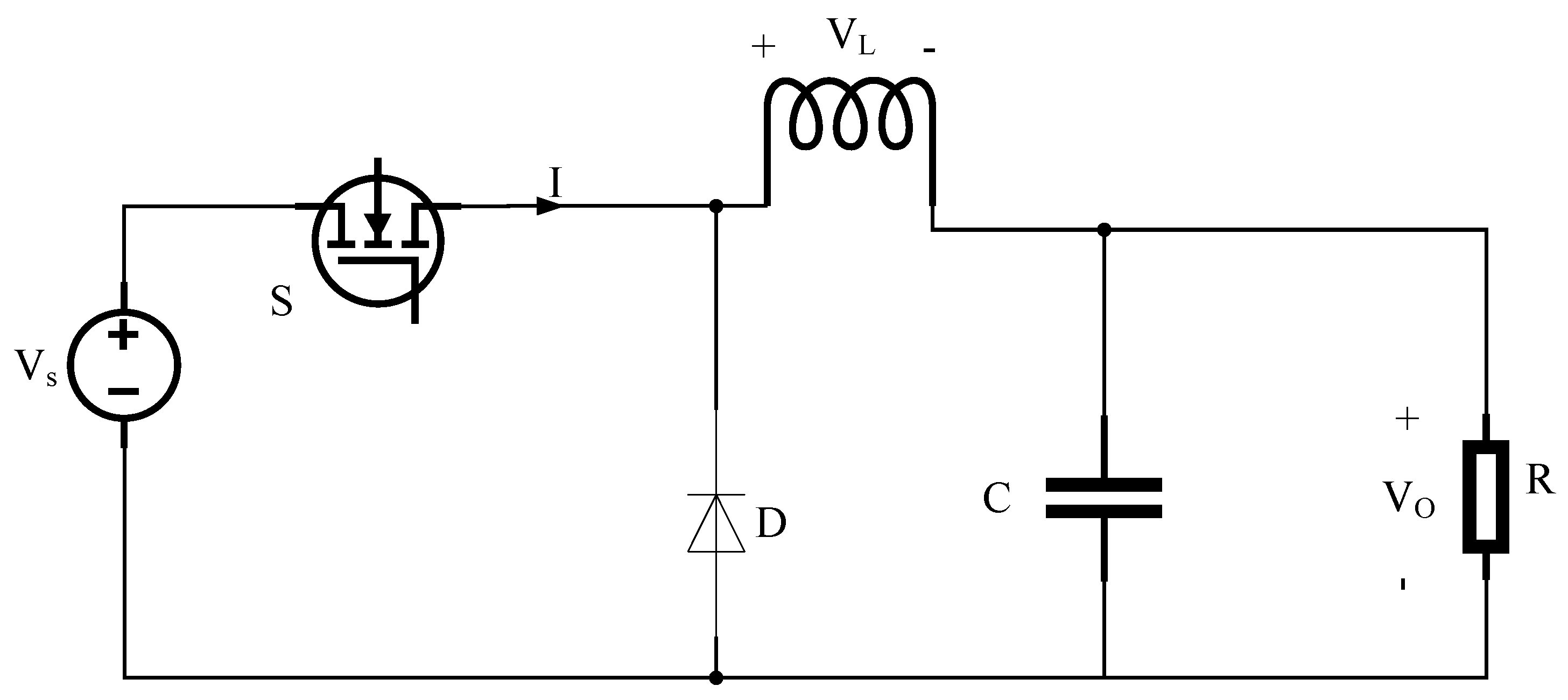
2.3. Model of DC/DC Buck Converter
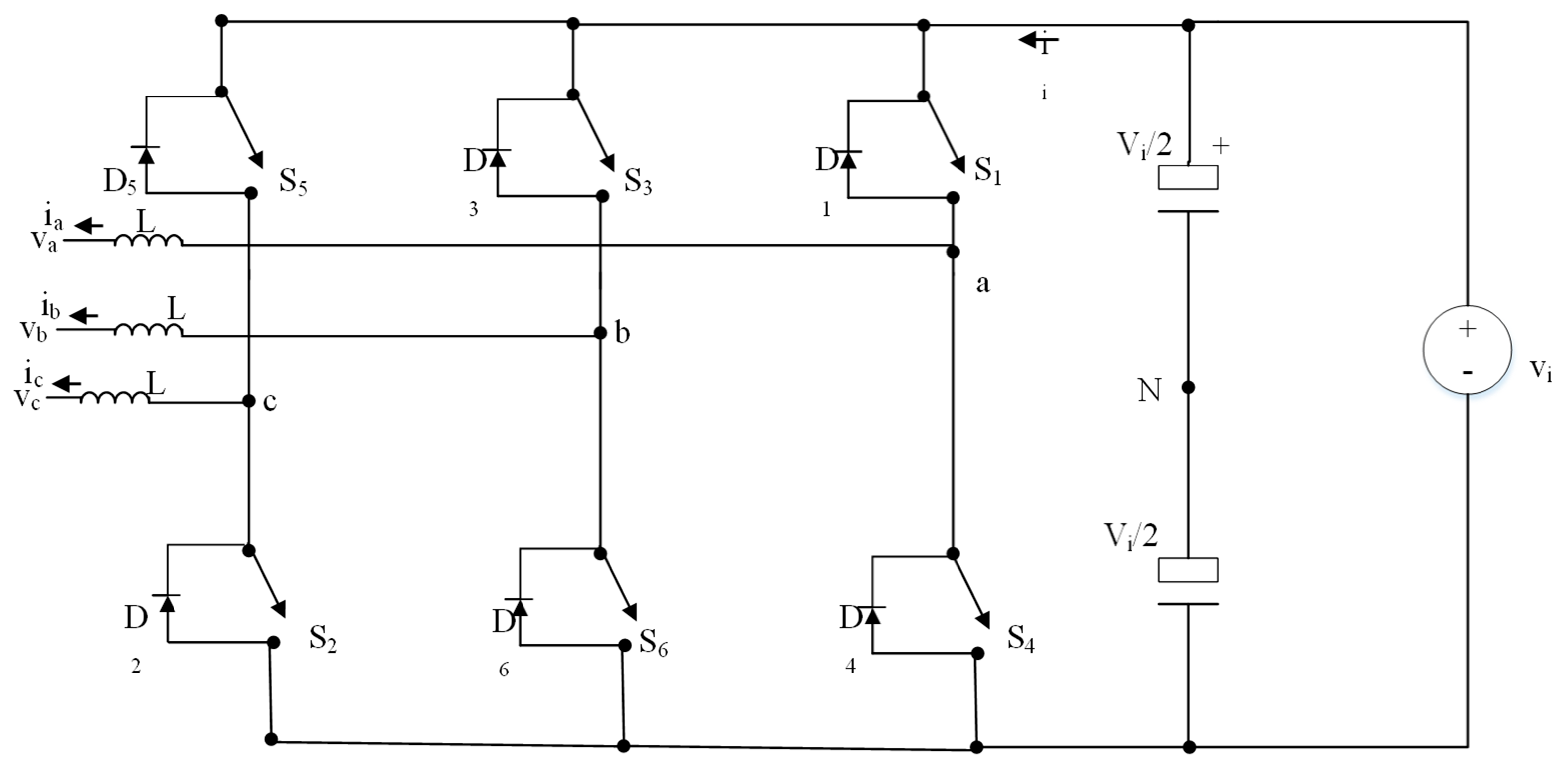
2.4. Model of Inverter
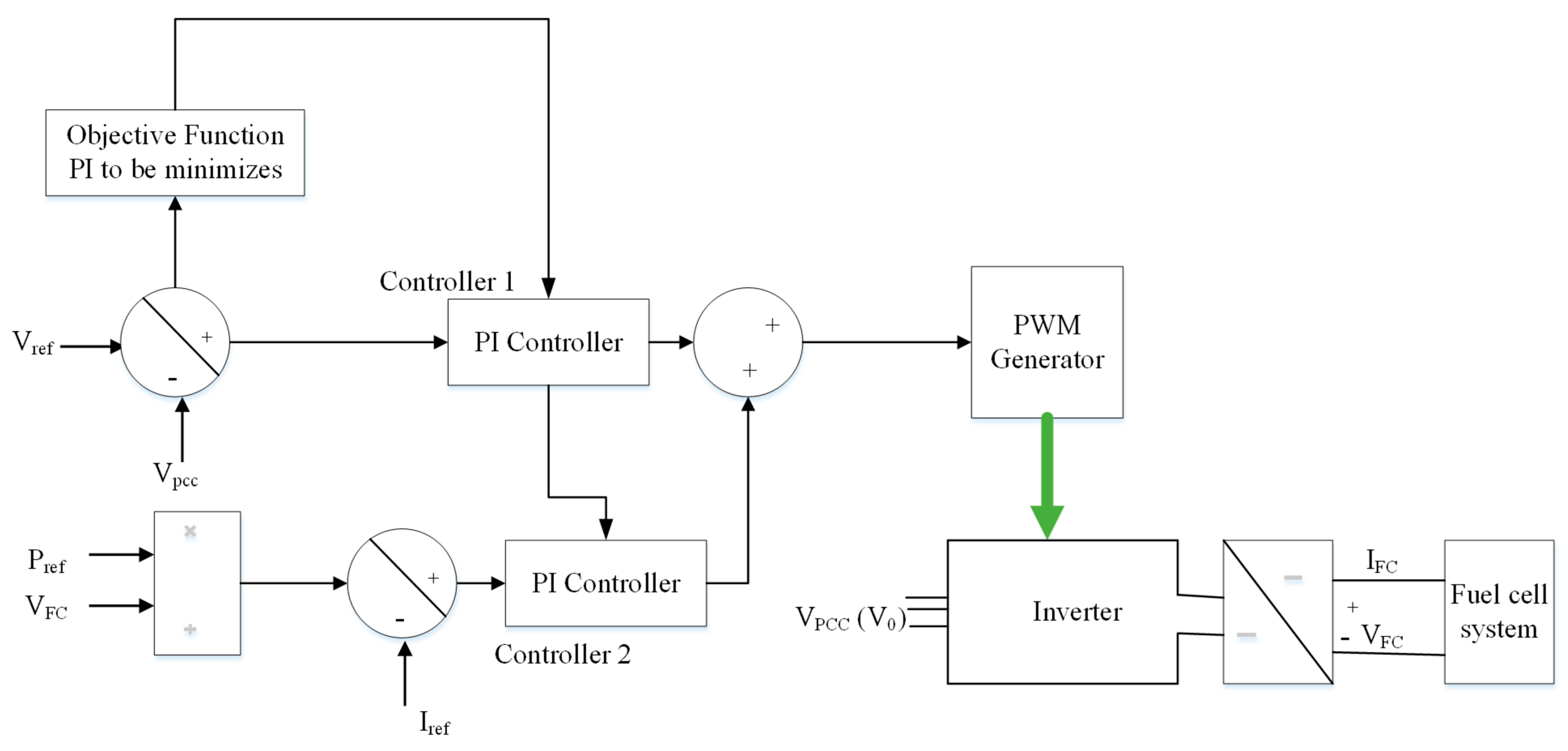
2.5. Control of Inverter by PI Regulator
3. Pelican Optimization Algorithm
3.1. Mathematical Expression of the Offered PO
- Exploration stage (motion in the direction of bait);
- Exploitation stage (winging on the surface of the water).
3.1.1. Stage 1: Exploration Stage (Motion in the Direction of Bait)
3.1.2. Stage 2: Exploitation Stage (Winging on the Surface of the Water)
3.1.3. Stage Repetition
3.2. Modified Pelican Optimizer
3.2.1. Initialization Founded on Chaos Theory
3.2.2. Acceleration Constant Numbers Based on Sigmoid
4. Results and Discussion
4.1. Validation of the MPO Algorithm
4.2. Simulation Results
- 1.
- Network configuration before a switching event:
- The total active power losses: 120 MW
- The number of substations: 10
- 2.
- Network configuration after the switching event (proposed method):
- The total active power losses: 85 MW
- The number of substations: 10
- 3.
- Network configuration before a fault event:
- The total active power losses: 98 MW
- The number of false locations: 2
- 4.
- Network configuration after the fault event (proposed method):
- The total active power losses: 45 MW
- The number of fault locations: 0
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sheng, C.; Fu, J.; Li, D.; Jiang, C.; Guo, Z.; Li, B.; Lei, J.; Zeng, L.; Deng, Z.; Fu, X.; et al. Energy management strategy based on health state for a PEMFC/Lithium-ion batteries hybrid power system. Energy Convers. Manag. 2022, 271, 116330. [Google Scholar] [CrossRef]
- Wang, B.; Yang, Z.; Ji, M.; Shan, J.; Ni, M.; Hou, Z.; Cai, J.; Gu, X.; Yuan, X.; Gong, Z.; et al. Long short-term memory deep learning model for predicting the dynamic performance of automotive PEMFC system. Energy AI 2023, 14, 100278. [Google Scholar] [CrossRef]
- Guida, D.; Minutillo, M. Design methodology for a PEM fuel cell power system in a more electrical aircraft. Appl. Energy 2017, 192, 446–456. [Google Scholar] [CrossRef]
- Zamora, I.; Martin, J.S.; Aperribay, V.; Torres, E.; Eguia, P. Influence of the rated power in the performance of different proton exchange membrane (PEM) fuel cells. Energy 2010, 35, 1898–1907. [Google Scholar]
- Ghadimi, N.; Sedaghat, M.; Azar, K.K.; Arandian, B.; Fathi, G.; Ghadamyari, M. An innovative technique for optimization and sensitivity analysis of a PV/DG/BESS based on con-verged Henry gas solubility optimizer: A case study. IET Gener. Transm. Distrib. 2023, in press.
- Silaa, M.Y.; Bencherif, A.; Barambones, O. A novel robust adaptive sliding mode control using stochastic gradient descent for PEMFC power system. Int. J. Hydrog. Energy 2023, 48, 17277–17292. [Google Scholar] [CrossRef]
- Trojovský, P.; Dehghani, M. Pelican optimization algorithm: A novel nature-inspired algorithm for engineering applications. Sensors 2022, 22, 855. [Google Scholar] [CrossRef] [PubMed]
- Tuerxun, W.; Xu, C.; Haderbieke, M.; Guo, L.; Cheng, Z. A Wind Turbine Fault Classification Model Using Broad Learning System Optimized by Improved Pelican Optimization Algorithm. Machines 2022, 10, 407. [Google Scholar] [CrossRef]
- Al-Wesabi, F.N.; Mengash, H.A.; Marzouk, R.; Alruwais, N.; Allafi, R.; Alabdan, R.; Alharbi, M.; Gupta, D. Pelican Optimization Algorithm with Federated Learning Driven Attack Detection model in Internet of Things environment. Futur. Gener. Comput. Syst. 2023, 148, 118–127. [Google Scholar] [CrossRef]
- Ge, X.; Li, C.; Li, Y.; Yi, C.; Fu, H. A hyperchaotic map with distance-increasing pairs of coexisting attractors and its application in the pelican optimization algorithm. Chaos Solitons Fractals 2023, 173, 113636. [Google Scholar] [CrossRef]
- Sharma, S.; Singh, G. Design and analysis of novel chaotic pelican-optimization algorithm for feature-selection of occupa-tional stress. Procedia Comput. Sci. 2023, 218, 1497–1505. [Google Scholar] [CrossRef]
- Xiong, Q.; She, J.; Xiong, J. A New Pelican Optimization Algorithm for the Parameter Identification of Memristive Chaotic System. Symmetry 2023, 15, 1279. [Google Scholar] [CrossRef]
- Zhu, L.; Zhang, F.; Zhang, Q.; Chen, Y.; Khayatnezhad, M.; Ghadimi, N. Multi-criteria evaluation and optimization of a novel thermodynamic cycle based on a wind farm, Kalina cycle and storage system: An effort to improve efficiency and sustainability. Sustain. Cities Soc. 2023, 96, 104718. [Google Scholar] [CrossRef]
- Tian, D.; Zhao, X.; Shi, Z. Chaotic particle swarm optimization with sigmoid-based acceleration coefficients for numerical function optimization. Swarm Evol. Comput. 2019, 51, 100573. [Google Scholar] [CrossRef]
- Cui, Z.; Zhang, J.; Wang, Y.; Cao, Y.; Cai, X.; Zhang, W.; Chen, J. A pigeon-inspired optimization algorithm for many-objective optimization problems. Sci. China Inf. Sci. 2019, 62, 70212. [Google Scholar] [CrossRef]
- Simon, D. Biogeography-based optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef]
- Yazdani, M.; Jolai, F. Lion Optimization Algorithm (LOA): A nature-inspired metaheuristic algorithm. J. Comput. Des. Eng. 2015, 3, 24–36. [Google Scholar] [CrossRef]
- Zhang, D.; Yang, Y.; Fang, J.; Alkhayyat, A. An optimal methodology for optimal controlling of a PEMFC connected to the grid based on amended penguin optimization algorithm. Sustain. Energy Technol. Assess. 2022, 53, 102401. [Google Scholar] [CrossRef]
- Roslan, M.F.; Al-Shetwi, A.Q.; Hannan, M.A.; Ker, P.J.; Zuhdi, A.W.M. Particle swarm optimization algorithm-based PI inverter controller for a grid-connected PV system. PLoS ONE 2020, 15, e0243581. [Google Scholar] [CrossRef] [PubMed]
- Abd Elmomen, A.H.; Hasanien, H.M.; Abdelaziz, A. Development of optimal PI controllers of an inverter–based decen-tralized energy generation system based on equilibrium optimization algorithm. Int. J. Renew. Energy Res. 2021, 11, 1095–1106. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value |
|---|---|---|
| Grid source | Three-phase voltage | 415 V AC |
| Frequency | 50 Hz | |
| Transformer | Voltage transformation ratio | 1.5 |
| Input voltage | 440 V AC | |
| Fuel cell converters | Number of PEMFC systems | 8 |
| Rated power capacity | 50 kW | |
| Output voltage | 700 V DC | |
| Buck converter | Voltage reduction ratio | 0.57 |
| Inverter | Inverter type | Grid-tied |
| Output voltage | 415 V AC | |
| Rated power capacity | 400 kW |
| Procedures | Variable | Value |
|---|---|---|
| PIO (pigeon-inspired optimization) [15] | Dimension space | 25 |
| Factor of compass and map | 0.3 | |
| Operation limit of compass and map | 120 | |
| Operation limit of landmark | 150 | |
| 1 | ||
| 1.2 | ||
| 1.2 | ||
| BBO (biogeography-based optimizer) [16] | Habitat change likelihood | 1 |
| Immigrating likelihood restrictions per gene | 0.6 | |
| Size of step for a numerical blend of possibilities | 0.9 | |
| Maximum emigrating (E) and immigrating (I) | 0.9 | |
| Likelihood of mutation | 0.002 | |
| LOA (lion optimization algorithm) [17] | Pride number | 6 |
| Migrant lion percentage | 0.2 | |
| Roaming percentage | 0.5 | |
| Likelihood of mutation | 0.2 | |
| Rate of sex | 0.9 | |
| Mating likelihood | 0.6 | |
| Rate of immigration | 0.4 |
| Benchmark | MPO | PO [7] | PIO [15] | BBO [16] | LOA [17] | |
|---|---|---|---|---|---|---|
| F1 | AVG | 0.00 | 4.36 | 5.44 | 5.72 | 4.10 |
| STD | 0.00 | 2.65 | 4.19 | 4.32 | 2.15 | |
| F2 | AVG | 1.02 | 5.26 | 6.04 | 5.93 | 5.37 |
| STD | 1.25 | 4.06 | 5.01 | 4.78 | 4.13 | |
| F3 | AVG | 0.00 | 5.36 × 10−9 | 2.321 × 10−8 | 5.26 × 10−8 | 5.46 × 10−9 |
| STD | 0.00 | 0.00 | 3.45 × 10−6 | 5.52 × 10−4 | 4.27 × 10−6 | |
| F4 | AVG | 0.00 | 0.00 | 5.36 × 10−8 | 6.28 × 10−7 | 6.42 × 10−8 |
| STD | 0.00 | 0.00 | 4.49 × 10−7 | 5.64 × 10−7 | 3.51 × 10−8 | |
| F5 | AVG | 0.00 | 2.46 | 3.26 | 4.13 | 2.96 |
| STD | 0.00 | 3.62 | 4.49 | 5.38 | 3.45 | |
| F6 | AVG | 0.03 | 4.36 | 5.63 | 5.21 | 4.91 |
| STD | 0.00 | 3.14 | 3.92 | 4.1 | 3.21 | |
| F7 | AVG | 0.00 | 4.63 | 4.85 | 4.94 | 4.37 |
| STD | 0.32 | 2.13 | 2.89 | 2.59 | 2.17 | |
| F8 | AVG | 0.00 | 0.36 | 0.84 | 0.76 | 0.25 |
| STD | 0.35 | 0.81 | 1.06 | 1.18 | 0.98 | |
| F9 | AVG | 0.00 | 0.09 | 0.87 | 1.05 | 0.44 |
| STD | 0.00 | 0.01 | 0.62 | 1.18 | 0.23 | |
| F10 | AVG | 0.00 | 1.36 | 1.05 | 1.23 | 1.2 |
| STD | 0.00 | 0.71 | 0.98 | 1.01 | 0.94 |
| Algorithm | Controller 1 | Controller 2 | SSE * | ||
|---|---|---|---|---|---|
| MPO | 7 | 412 | 9 | 14,028 | 0.0138 |
| APOA [18] | 8 | 315 | 10 | 13,420 | 0.0145 |
| EOA [20] | 6.5 | 2850 | 4.3 | 6500 | 0.0162 |
| PSO [19] | 0.8 | 4519 | 18.5 | 6854 | 0.0173 |
| Optimization Method | SSE* | Convergence Time (s) |
|---|---|---|
| MPO | 0.0138 | 52.3 |
| APOA [18] | 0.0145 | 83.6 |
| EOA [20] | 0.0162 | 57.9 |
| PSO [19] | 0.0173 | 64.2 |
| Event Type | MPO | APOA [18] | EOA [20] | PSO [19] |
|---|---|---|---|---|
| Switching events | 95% | 75% | 82% | 68% |
| Fault events | 98% | 85% | 89% | 77% |
| Sudden load on/off events | 92% | 69% | 74% | 61% |
| Time Interval (t) | ) |
|---|---|
| 0–5 s | 50 A |
| 5–10 s | 30 A |
| 10–15 s | −70 A |
| Time Interval (t) | ) | ) | ||||
|---|---|---|---|---|---|---|
| 0–5 s | 550 | 520 | 7 | 412 | 9 | 14,028 |
| 5–10 s | 480 | 450 | 7 | 412 | 9 | 14,028 |
| 10–15 s | 560 | 540 | 7 | 412 | 9 | 14,028 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Ghadimi, N. Optimal Design of the Proton-Exchange Membrane Fuel Cell Connected to the Network Utilizing an Improved Version of the Metaheuristic Algorithm. Sustainability 2023, 15, 13877. https://doi.org/10.3390/su151813877
Guo X, Ghadimi N. Optimal Design of the Proton-Exchange Membrane Fuel Cell Connected to the Network Utilizing an Improved Version of the Metaheuristic Algorithm. Sustainability. 2023; 15(18):13877. https://doi.org/10.3390/su151813877
Chicago/Turabian StyleGuo, Xuanxia, and Noradin Ghadimi. 2023. "Optimal Design of the Proton-Exchange Membrane Fuel Cell Connected to the Network Utilizing an Improved Version of the Metaheuristic Algorithm" Sustainability 15, no. 18: 13877. https://doi.org/10.3390/su151813877
APA StyleGuo, X., & Ghadimi, N. (2023). Optimal Design of the Proton-Exchange Membrane Fuel Cell Connected to the Network Utilizing an Improved Version of the Metaheuristic Algorithm. Sustainability, 15(18), 13877. https://doi.org/10.3390/su151813877