
Impact of Autonomous Vehicles on Traffic Flow in Rural and Urban Areas Using a Traffic Flow Simulator


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Autonomous Vehicles
2.1. Outline of Autonomous Vehicles
2.2. Demonstration Experiment in Suzu City, Japan
3. Evaluation of Social Acceptability of Autonomous Vehicles
3.1. Execution Environment of the Simulation
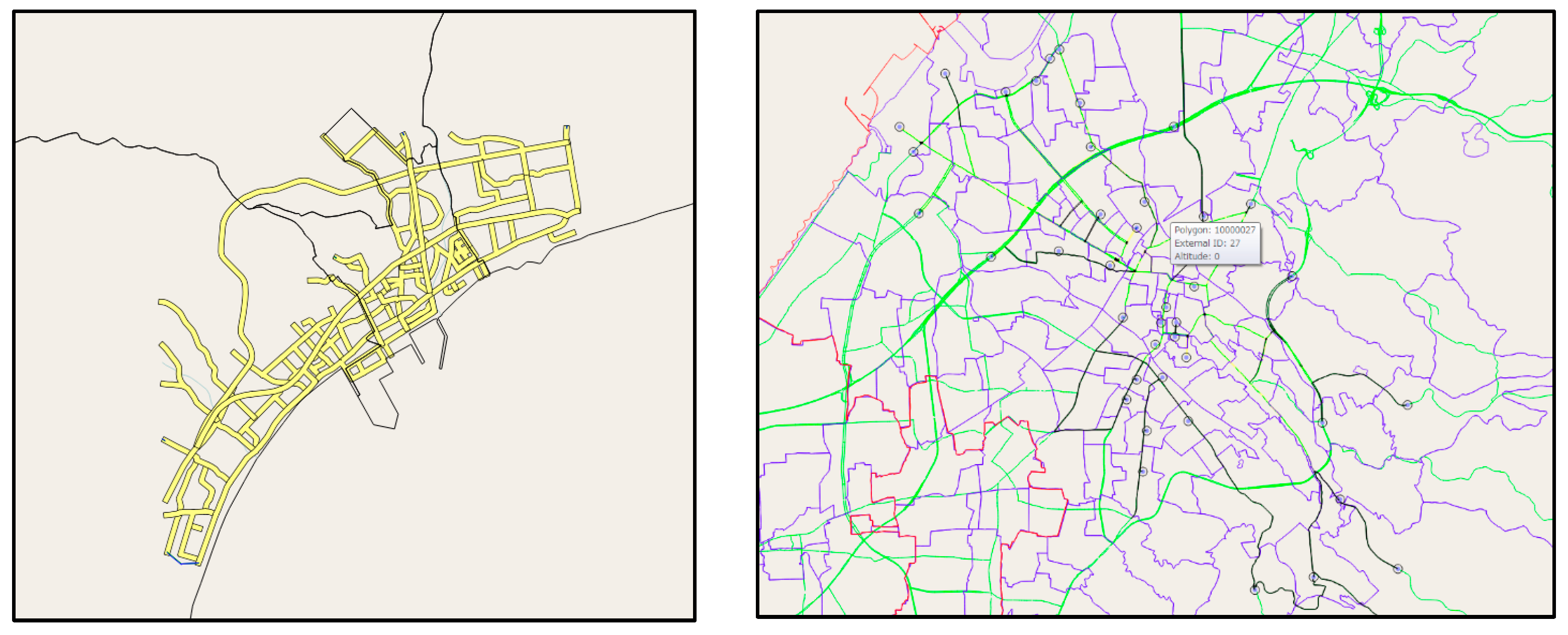
3.2. Simulation Area
3.3. Simulation Data
3.4. Driving Behavior Algorithm of Autonomous Vehicle
3.4.1. Car-Following Theory
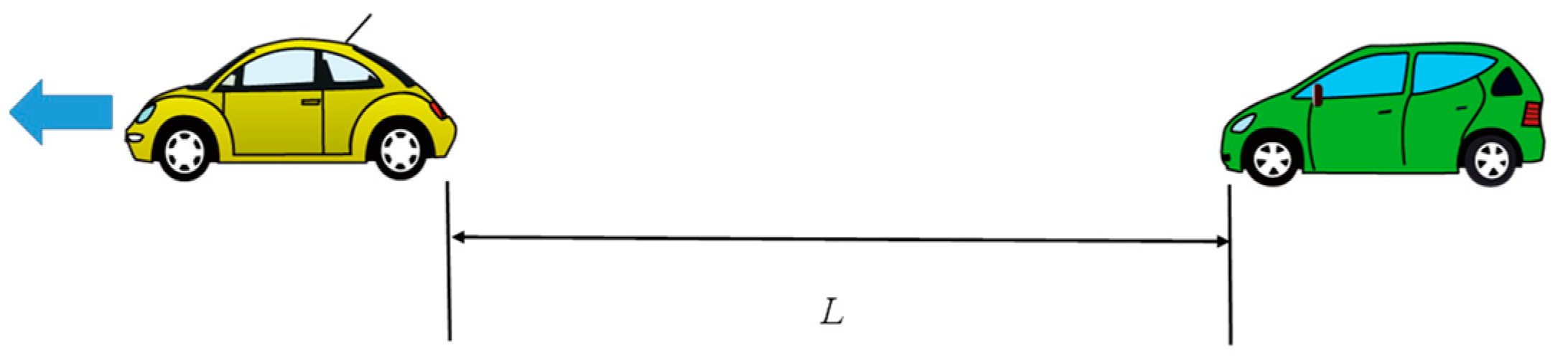
3.4.2. Vehicle Interval
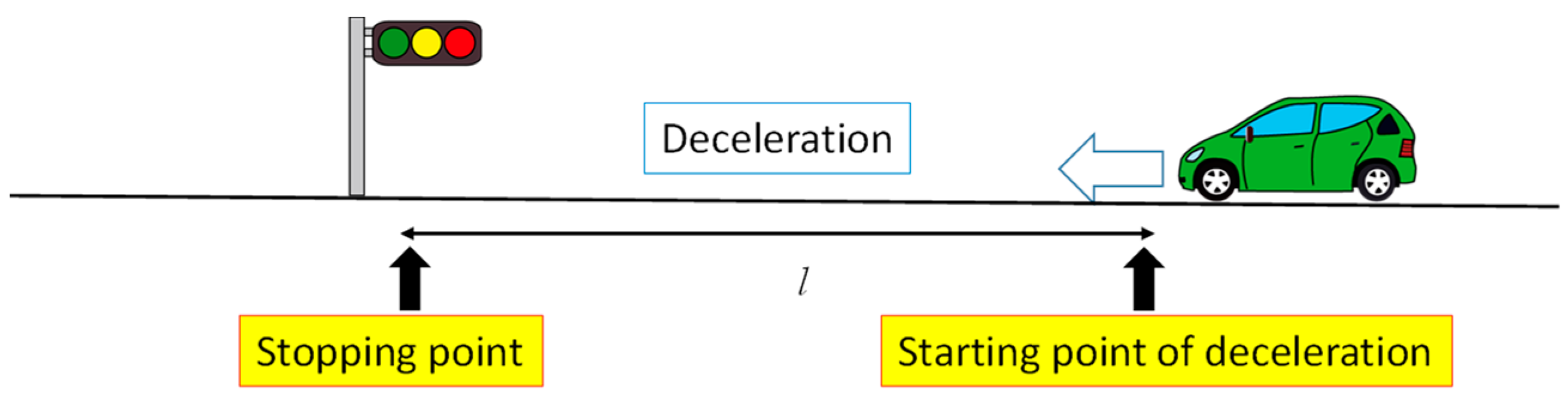
3.4.3. Deceleration Starting Distance
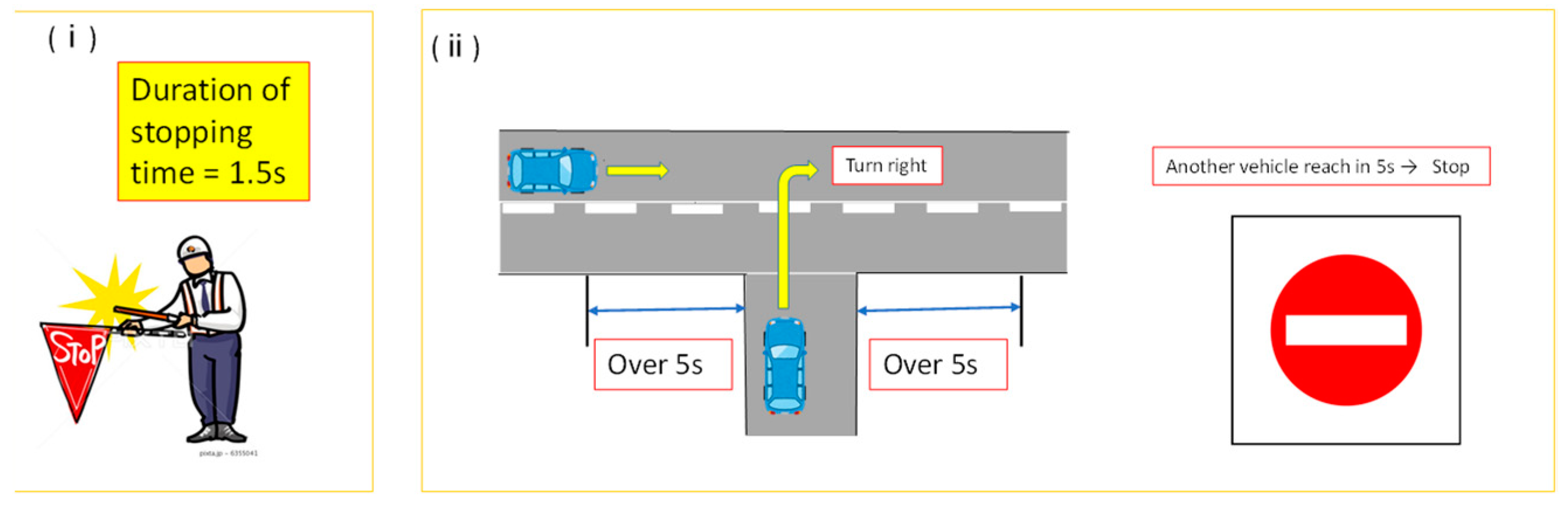
3.4.4. Determining When to Turn Right or Left
3.4.5. Reaction Time
4. Results and Discussion
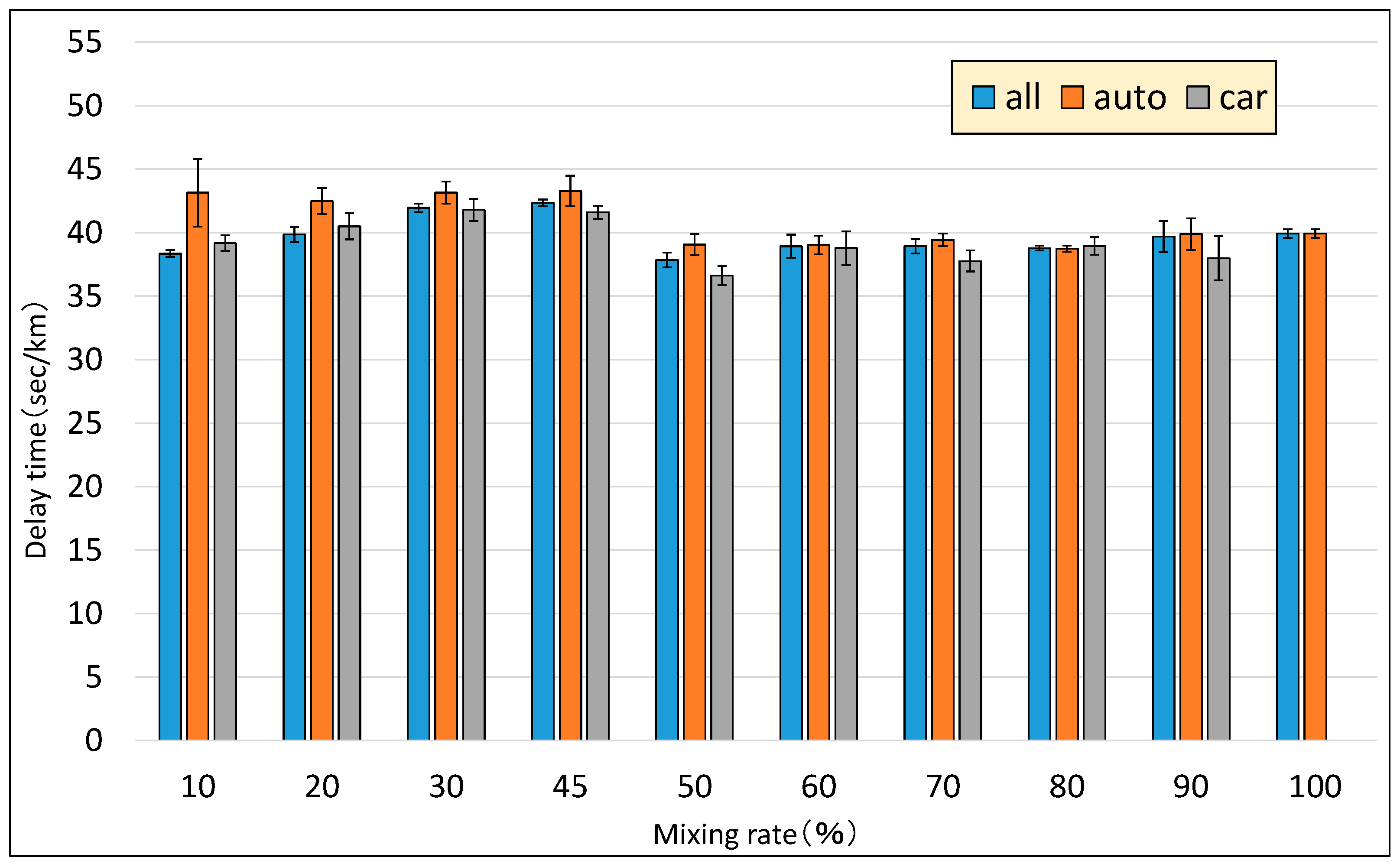
4.1. Simulation Results for Rural Areas
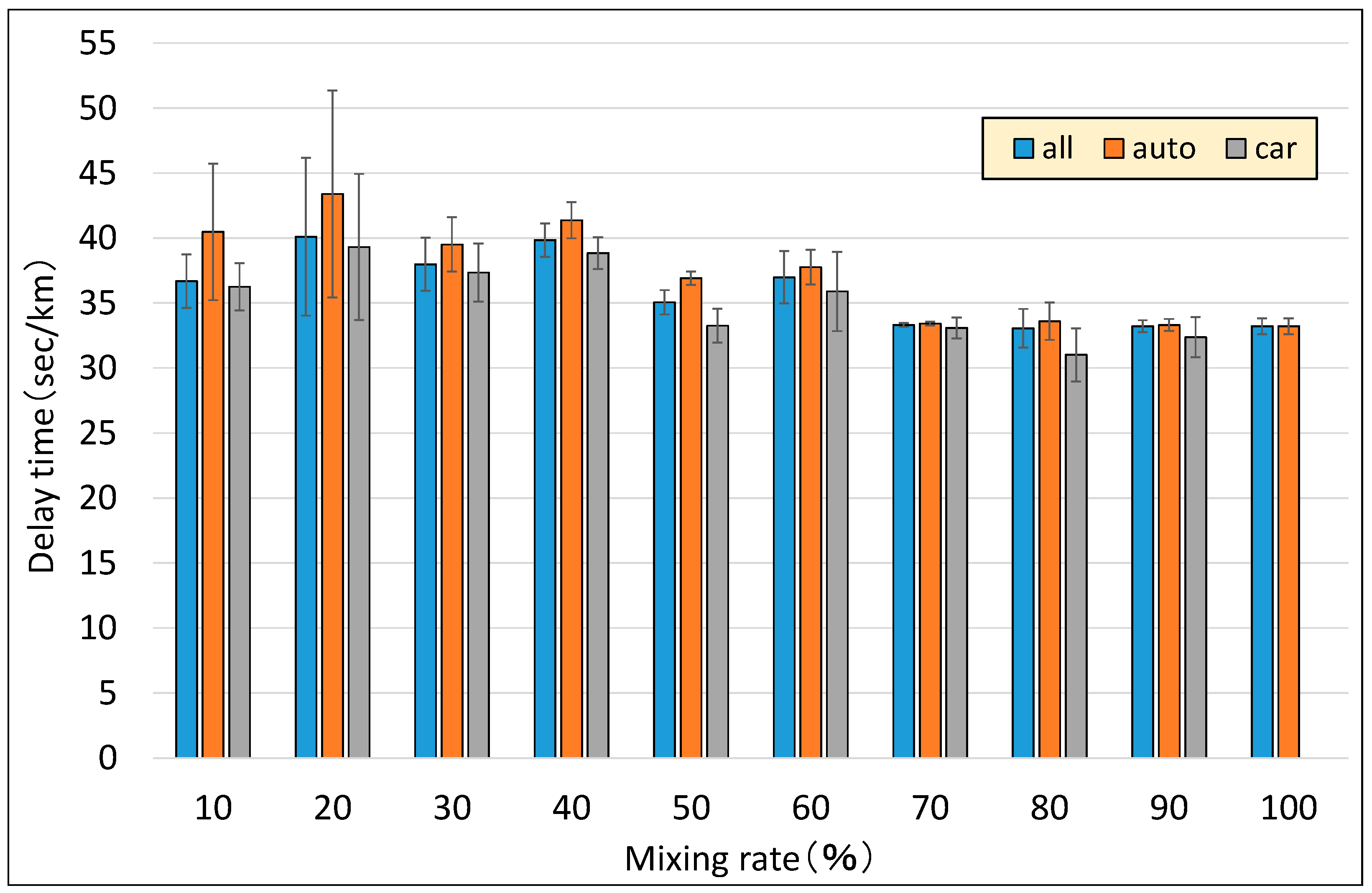
4.2. Simulation Results for Urban Areas
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khodayari, A.; Ghaffari, A.; Ameli, S.; Flahatgar, J. A Historical Review on Lateral and Longitudinal Control of Autonomous Vehicle Motions. In Proceedings of the 2010 2nd International Conference on Mechanical and Electrical Technology (ICMET), Singapore, 10–12 September 2010. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Forecasting Americans’ Long-term Adoption of Connected and Autonomous Vehicle Technologies. Transp. Res. Part A Policy Pract. 2015, 77, 164–181. [Google Scholar]
- Bansal, P.; Kockelman, K.M. Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D. A Multiclass Cell Transmission Model for Shared Human and Autonomous Vehicle Roads. Transp. Res. Part C Emerg. Technol. 2016, 62, 103–116. [Google Scholar] [CrossRef]
- Beiker, S.A. Legal Aspects of Autonomous Driving. Santa Clara Law Rev. 2016, 52, 1145. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D. A Cell Transmission Model for Dynamic Lane Reversal with Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2016, 68, 126–143. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M. Management of a Shared Autonomous ElectricVehicle Fleet Implications of Pricing Schemes. Transp. Res. Rec. J. Transp. Res. Board 2016, 2572, 37–46. [Google Scholar] [CrossRef]
- Bimbraw, K. Autonomous Cars: Past, Present and Future a Review of the Developments in the Last Century, the Present Scenario and the Expected Future of Autonomous Vehicle Technology. In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, France, 21–23 July 2015. [Google Scholar]
- Bonnefon, J.-F.; Shariff, A.; Rahwan, I. The Social Dilemma of Autonomous Vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef] [PubMed]
- Kalra, N.; Paddock, S.M. Driving to Safety: How Many Miles of Driving Would it Take to Demonstrate Autonomous Vehicle Reliability? Transp. Res. Part A Policy Pract. 2016, 94, 182–193. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M.; Hanna, J.P. Operations of a Shared, Autonomous, Electric Vehicle fleet: Implications of Vehicle and Charging Infrastructure Decisions. Transp. Res. Part A Policy Pract. 2016, 94, 243–254. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. The Travel and Environmental Implications of Shared Autonomous Vehicles, Using Agent-based Model Scenarios. Transp. Res. Part C Emerg. Technol. 2014, 40, 1–13. [Google Scholar] [CrossRef]
- Gucwa, M. Mobility and Energy Impacts of Automated Cars. In Proceedings of the Automated Vehicles Symposium, Burlingame, CA, USA, 15–17 July 2014. [Google Scholar]
- Hoogendoorn, R.; van Arerm, B.; Hoogendoom, S. Automated Driving, Traffic Flow Efficiency, and Human Factors Literature Review. Transp. Res. Rec. J. Transp. Res. Board 2014, 2422, 113–120. [Google Scholar] [CrossRef]
- Campbell, M.; Egerstedt, M.; How, J.P.; Murray, R.M. Autonomous Driving in Urban Environments: Approaches, Lessons, and Challenges. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4649–4672. [Google Scholar] [CrossRef]
- How, J.P.; Behihke, B.; Frank, A.; Dale, D.; Vian, J. Real-time Indoor Autonomous Vehicle Test Environment. IEEE Control Syst. 2008, 28, 51–64. [Google Scholar] [CrossRef]
- Howard, A. Real-time Stereo Visual Odometry for Autonomous Ground Vehicles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2008, Nice, France, 22–26 September 2008; pp. 3946–3952. [Google Scholar]
- Kuwata, Y.; Teo, J.; Fiore, G.; Karaman, S.; Frazzoli, E.; How, J.P. Real-Time Motion Planning with Applications to Autonomous Urban Driving. EEE Trans. Control Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Platooning of Autonomous Vehicles with Intervehicle Communications in SUMO Traffic Simulator. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010. [Google Scholar] [CrossRef]
- Douglas, A.R.; Shafer, S.A. Computational Model of Driving for Autonomous Vehicles. Transp. Res. Part A Policy Pract. 1993, 27, 23–50. [Google Scholar]
- Vine, S.L.; Zolfaghari, A.; Polak, J. Autonomous Cars: The Tension between Occupant Experience and Intersection Capacity. Transp. Res. Part C Emerg. Technol. 2015, 52, 1–14. [Google Scholar] [CrossRef]
- Khalaji, A.K.; Moosavian, S.A.A. Dynamic Modeling and Tracking Control of a Car with n trailers. Multibody Syst. Dyn. 2016, 37, 211–225. [Google Scholar] [CrossRef]
- Bose, A.; Ioannou, P. Analysis of Traffic Flow with Mixed Manual and Semiautomated Vehicles. IEEE Trans. Intell. Transp. Syst. 2003, 4, 173–188. [Google Scholar] [CrossRef]
- Michael, J.B.; Godbole, D.N.; Lygeros, J.; Sengupta, R. Capacity Analysis of Traffic Flow Over a Single-Lane Automated Highway System. ITS J. Intell. Transp. Syst. 1998, 4, 49–80. [Google Scholar] [CrossRef]
- Basak, K.; Hetu, S.N.; Li, Z.; Azevedo, C.L.; Loganathan, H.; Toledo, T.; Xu, R.; Xu, Y.; Peh, L.S.; Ben-Akiva, M. Modeling Reaction Time within a Traffic Simulation Model. In Proceedings of the 2013 16th International IEEE Conference on Intelligent Transportation Systems (ITSC), The Hague, The Netherlands, 6–9 October 2013. [Google Scholar]
- Sun, L.; Cheng, Z.; Kong, D.; Xu, Y.; Wen, S.; Zhang, K. Modeling and analysis of human-machine mixed traffic flow considering the influence of the trust level toward autonomous vehicles. Simul. Model. Pract. Theory 2023, 125, 102741. [Google Scholar] [CrossRef]
- Gallo, M. Models, algorithms, and equilibrium conditions for the simulation of autonomous vehicles in exclusive and mixed traffic. Simul. Model. Pract. Theory 2023, 129, 102838. [Google Scholar] [CrossRef]
- Szarata, A.; Ostaszewski, P.; Mirzahossein, H. Simulating the impact of autonomous vehicles (AVs) on intersections traffic conditions using TRANSYT and PTV Vissim. Innov. Infrastruct. Solut. 2023, 8, 164. [Google Scholar] [CrossRef]
- Körtgen, C.; Abel, J.; Menzel, P. Simulation of Dense Traffic Situations to Validate Autonomous Driving Functions. ATZelectron. Worldw. 2022, 17, 48–52. [Google Scholar] [CrossRef]
- Tientrakool, P.; Ho, Y.-C.; Maxemchuk, N.F. Highway Capacity Benefits from Using Vehicle-to-Vehicle Communication and Sensors for Collision Avoidance. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, M.; Yi, M.; Huang, M.; Huang, G.; Ren, Y.; Liu, A. A novel deep policy gradient action quantization for trusted collaborative computation in intelligent vehicle networks. Expert Syst. Appl. Int. J. 2023, 221, 119743. [Google Scholar] [CrossRef]
- Liu, R.; Liu, A.; Qu, Z.; Xiong, N.N. An UAV-enabled intelligent connected transportation system with 6G communications for internet of vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2045–2059. [Google Scholar] [CrossRef]
- Teng, H.; Dong, M.; Liu, Y.; Tian, W.; Liu, X. A low-cost physical location discovery scheme for large-scale Internet of Things in smart city through joint use of vehicles and UAVs. Futur. Gener. Comput. Syst. 2021, 118, 310–326. [Google Scholar] [CrossRef]
- Suganuma, N.; Yamamoto, D.; Yoneda, K. Localization for Autonomous Vehicle on Urban Roads. J. Adv. Control Autom. Robot. 2015, 1, 47–53. [Google Scholar]
- Ye, L.; Yamamoto, T. Evaluating the impact of connected and autonomous vehicles on traffic safety. Phys. A Stat. Mech. Its Appl. 2019, 526, 121009. [Google Scholar] [CrossRef]
- Yoneda, K.; Kuramoto, A.; Suganuma, N.; Asaka, T.; Aldibaja, M.; Yanase, R. Robust Traffic Light and Arrow Detection Using Digital Map with Spatial Prior Information for Automated Driving. Sensors 2020, 20, 1181. [Google Scholar] [CrossRef]
- Yoneda, K.; Hashimoto, N.; Yanase, R.; Aldibaja, M.; Suganuma, N. Vehicle Localization using 76 GHz Omnidirectional Millimeter-Wave Radar for Winter Automated Driving. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium, Changshu, China, 26–30 June 2018; pp. 971–977. [Google Scholar]
- Yoneda, K.; Suganuma, N.; Aldibaja, M. Simultaneous Sate Recognition for Multiple Traffic Signals on Urban Road. In Proceedings of the MECATRONICS-REM, Compiegne, France, 15–17 June 2016; pp. 135–140. [Google Scholar]
- Kuramoto, A.; Kameyama, J.; Yanase, R.; Aldibaja, M.; Kim, T.H.; Yoneda, K.; Suganuma, N. Digital Map Based Signal State Recognition of Far Traffic Lights with Low Brightness. In Proceedings of the 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5445–5450. [Google Scholar]
- Yamamoto, D.; Suganuma, N. Localization for Autonomous Driving on Urban Road. In Proceedings of the International Conference on Intelligent Informatics and BioMedical Sciences, Okinawa, Japan, 28–30 November 2015. [Google Scholar]
- Yoneda, K.; Yanase, R.; Aldibaja, M.; Suganuma, N.; Sato, K. Mono-Camera based vehicle localization using Lidar Intensity Map for automated driving. Artif. Life Robot. 2018, 24, 147–154. [Google Scholar] [CrossRef]
- Yoneda, K.; Suganuma, N.; Yanase, R.; Aldibaja, M. Automated driving recognition technologies for adverse weather conditions. IATSS Res. 2019, 43, 253–262. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fujiu, M.; Morisaki, Y.; Takayama, J. Impact of Autonomous Vehicles on Traffic Flow in Rural and Urban Areas Using a Traffic Flow Simulator. Sustainability 2024, 16, 658. https://doi.org/10.3390/su16020658
Fujiu M, Morisaki Y, Takayama J. Impact of Autonomous Vehicles on Traffic Flow in Rural and Urban Areas Using a Traffic Flow Simulator. Sustainability. 2024; 16(2):658. https://doi.org/10.3390/su16020658
Chicago/Turabian StyleFujiu, Makoto, Yuma Morisaki, and Jyunich Takayama. 2024. "Impact of Autonomous Vehicles on Traffic Flow in Rural and Urban Areas Using a Traffic Flow Simulator" Sustainability 16, no. 2: 658. https://doi.org/10.3390/su16020658
APA StyleFujiu, M., Morisaki, Y., & Takayama, J. (2024). Impact of Autonomous Vehicles on Traffic Flow in Rural and Urban Areas Using a Traffic Flow Simulator. Sustainability, 16(2), 658. https://doi.org/10.3390/su16020658