

Assessing the Impact of CAV Driving Strategies on Mixed Traffic on the Ring Road and Freeway


Abstract
:1. Introduction
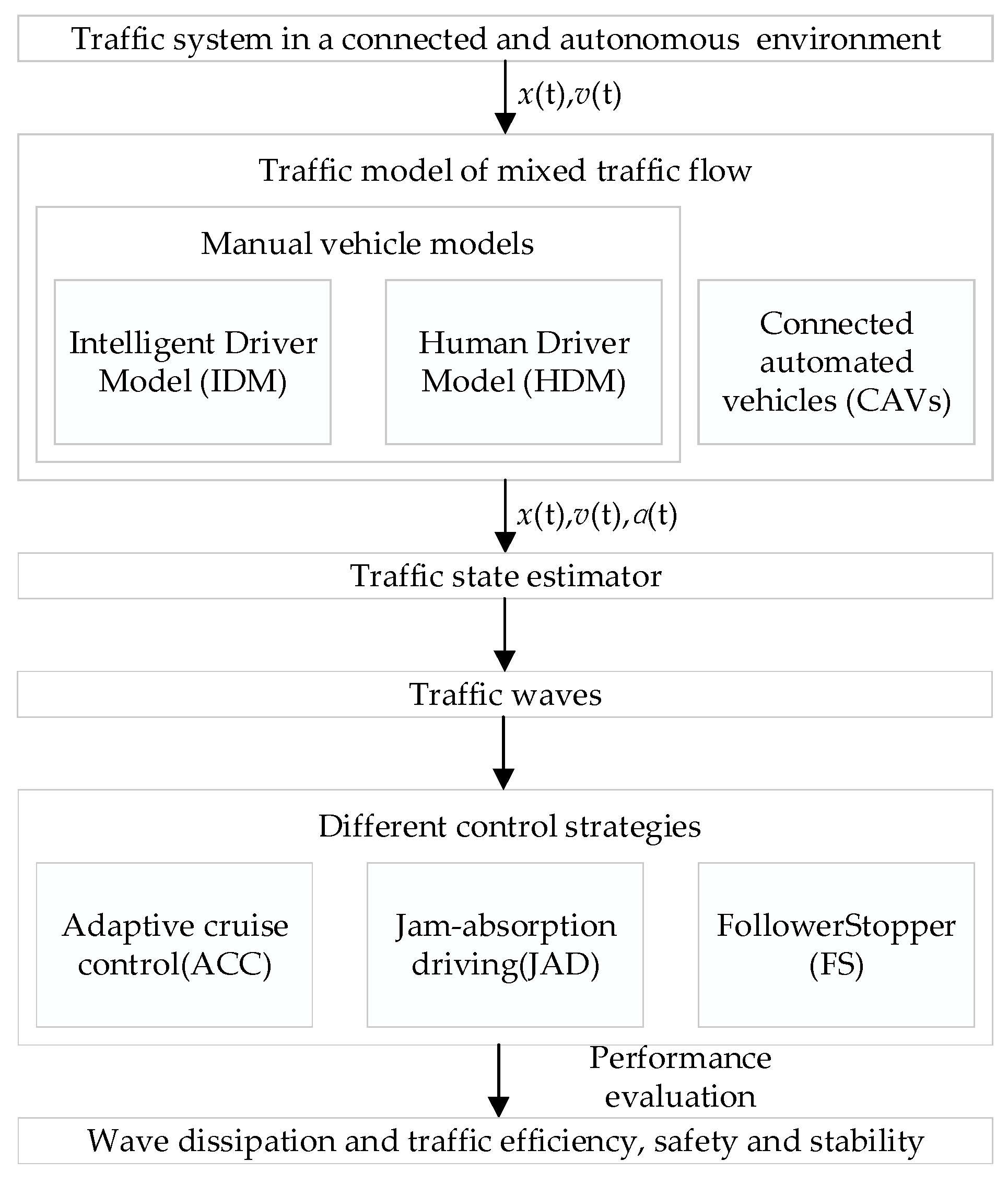
2. Simulation Framework
3. Experimental Set-Up
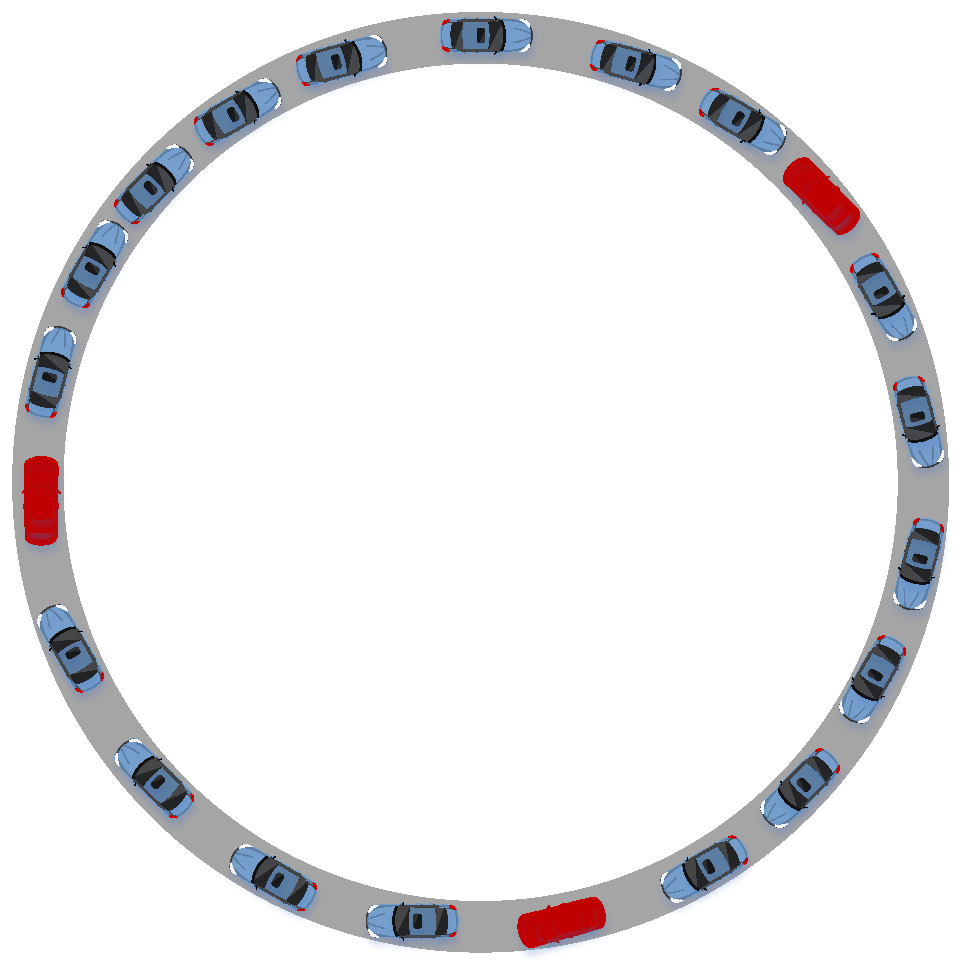
3.1. Ring-Road
3.2. Freeway Stretch
3.3. Definition of Performance Metrics
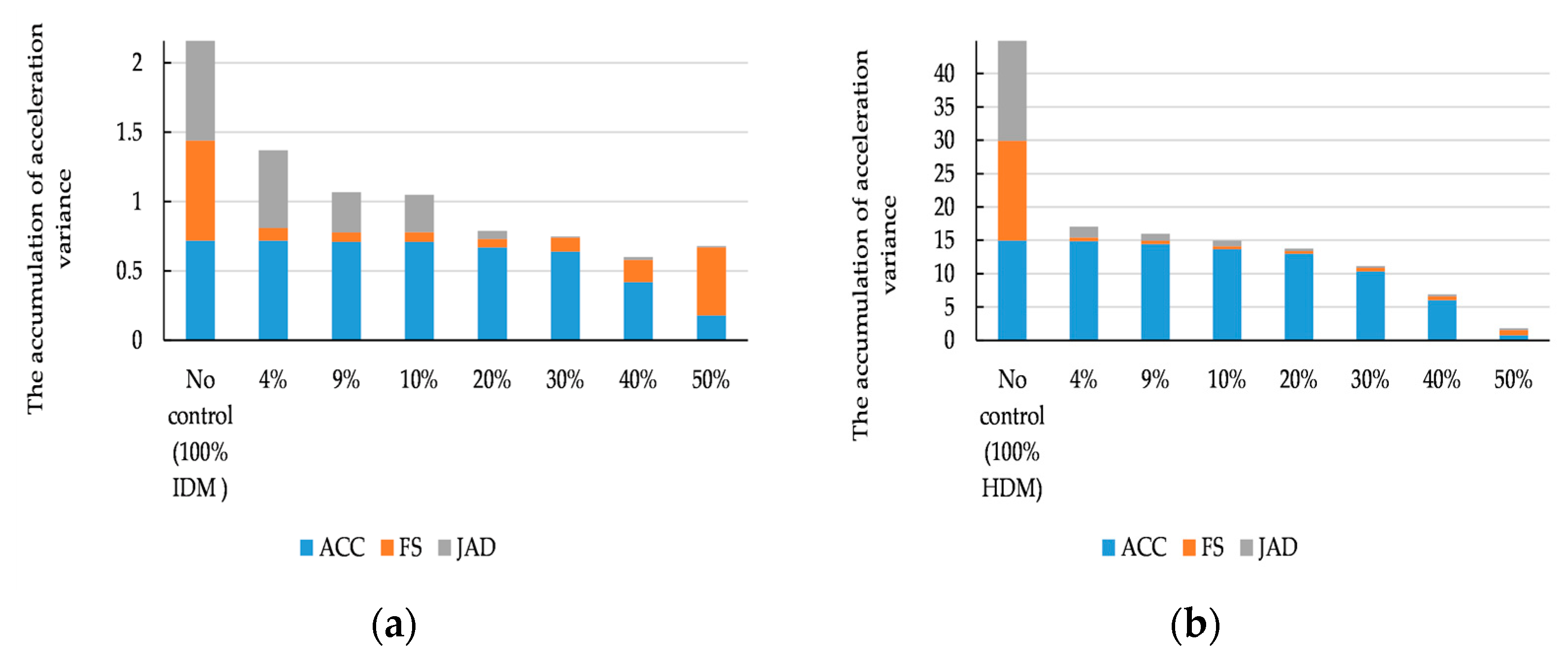
4. Results and Discussion
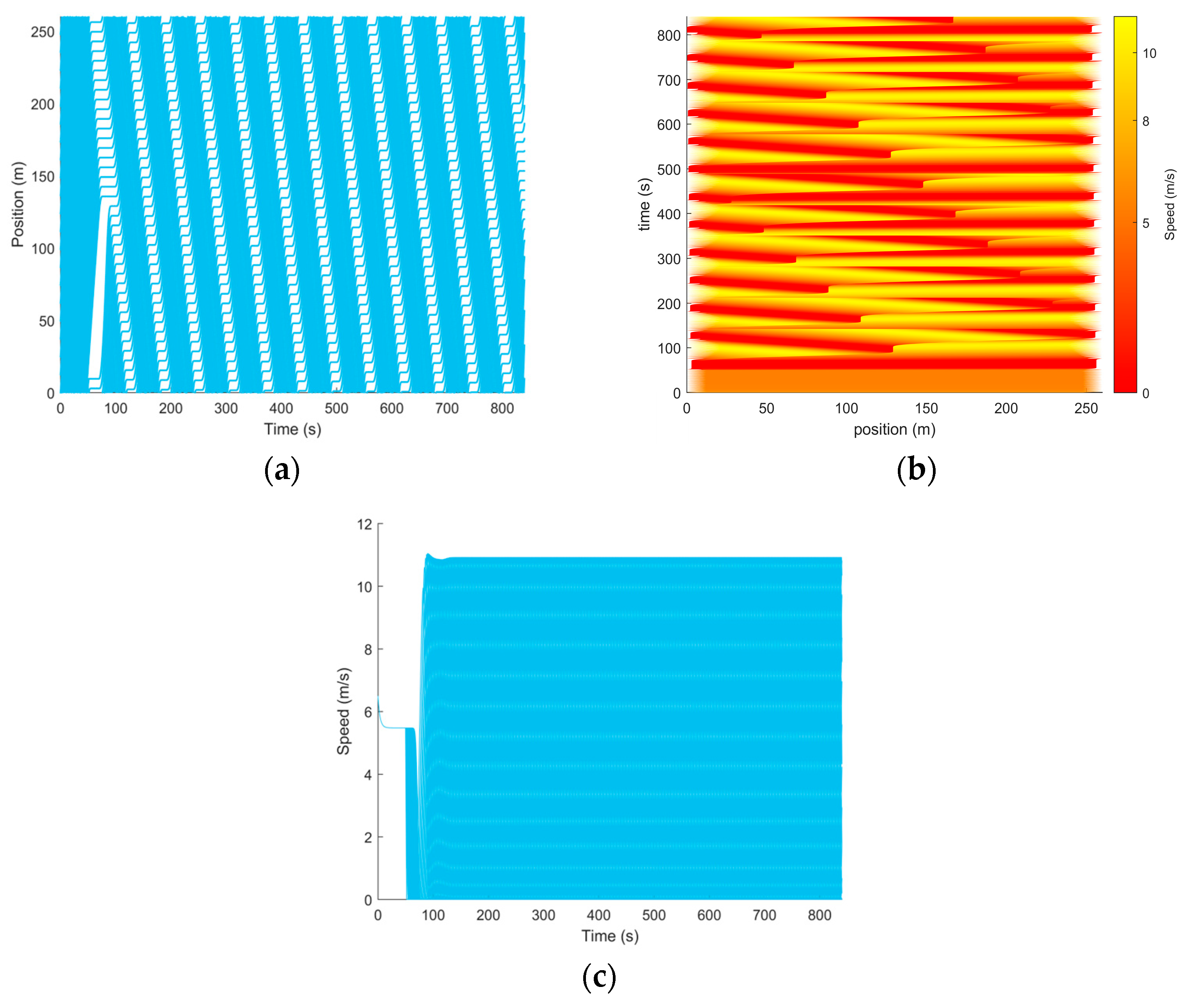
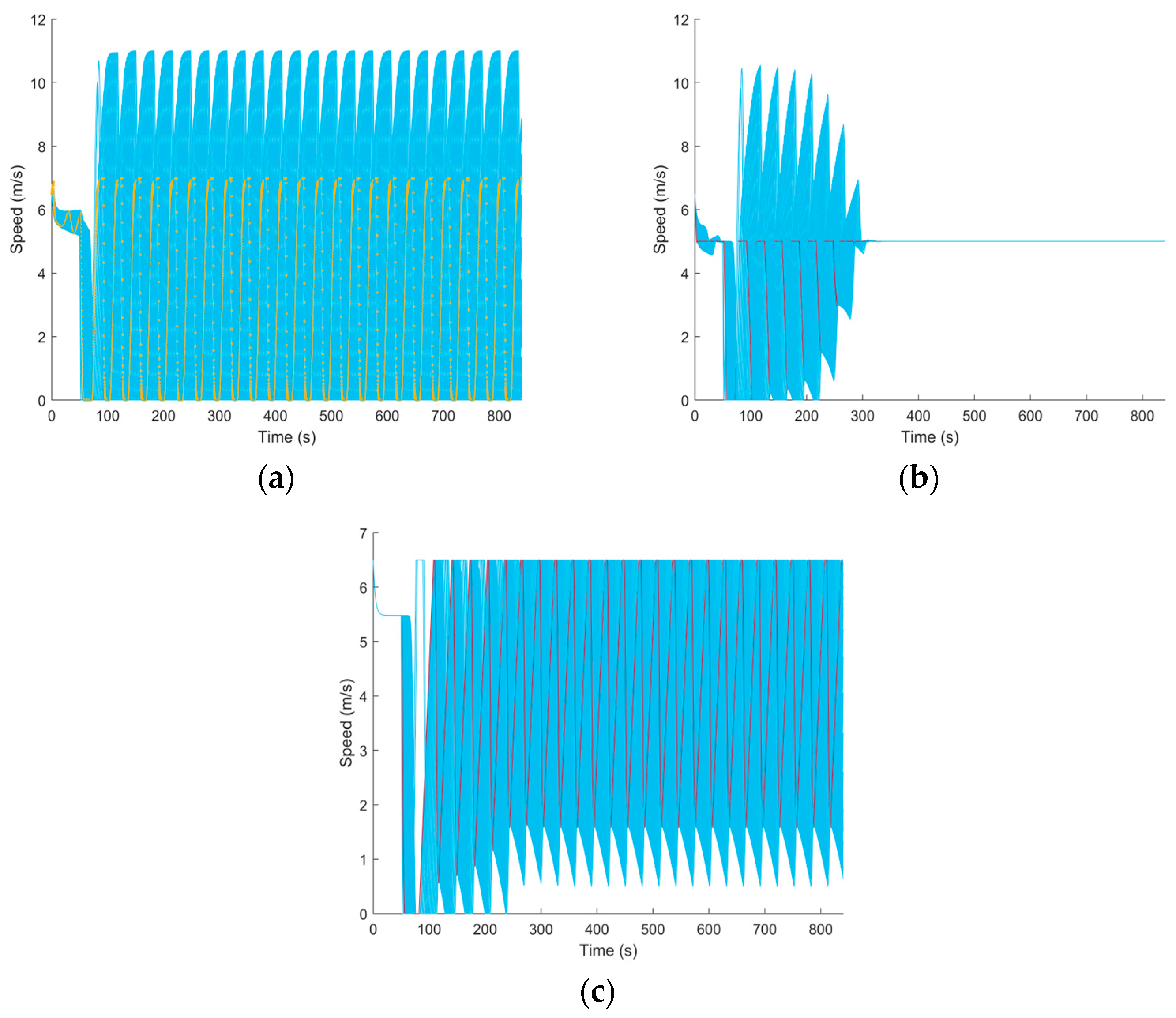
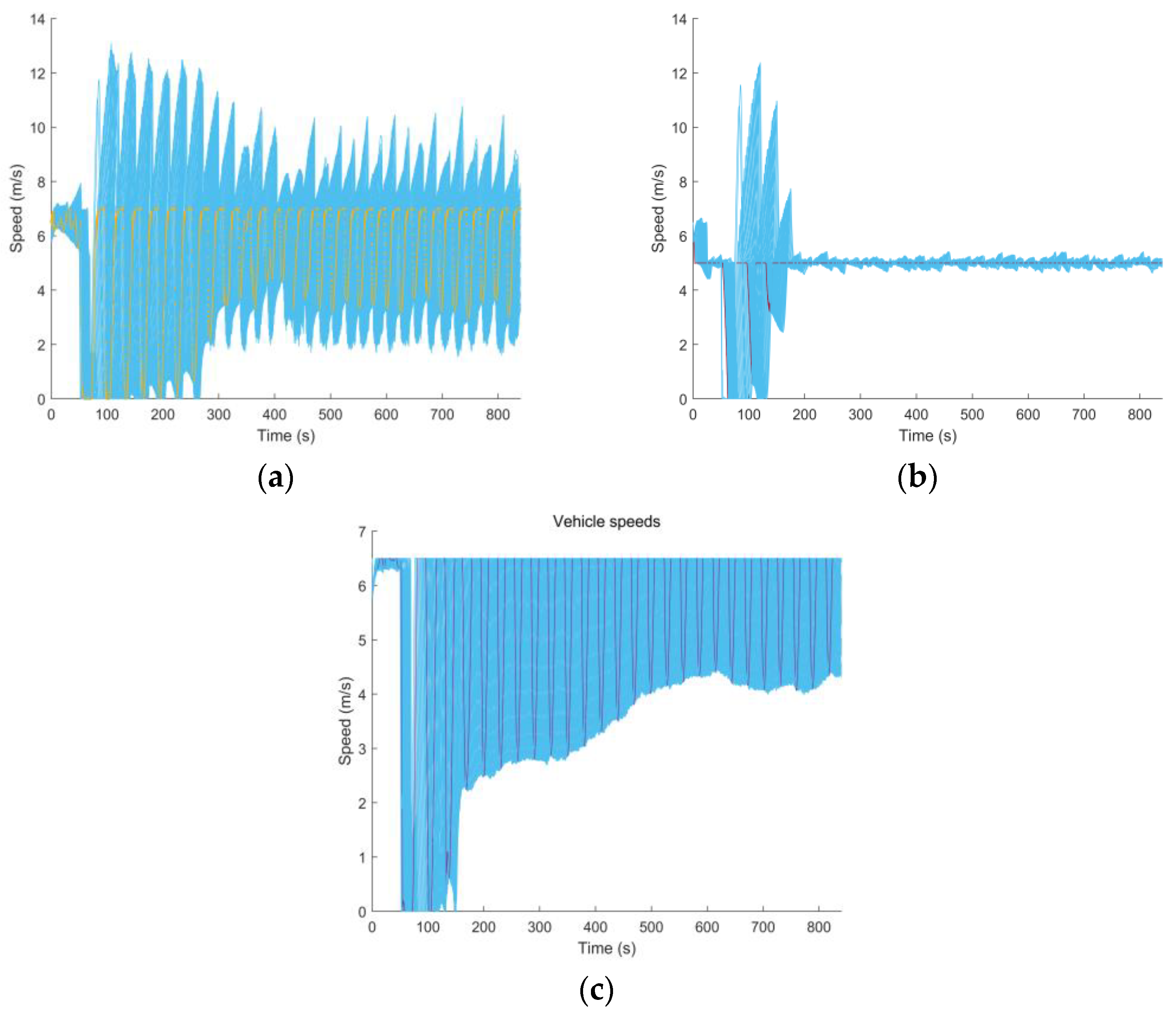
4.1. A Scenario with a Series of Traffic Oscillations on the Ring Road
4.1.1. The Ring Road with a Single Guidance Vehicle
4.1.2. The Ring Road with Multiple Guidance Vehicles
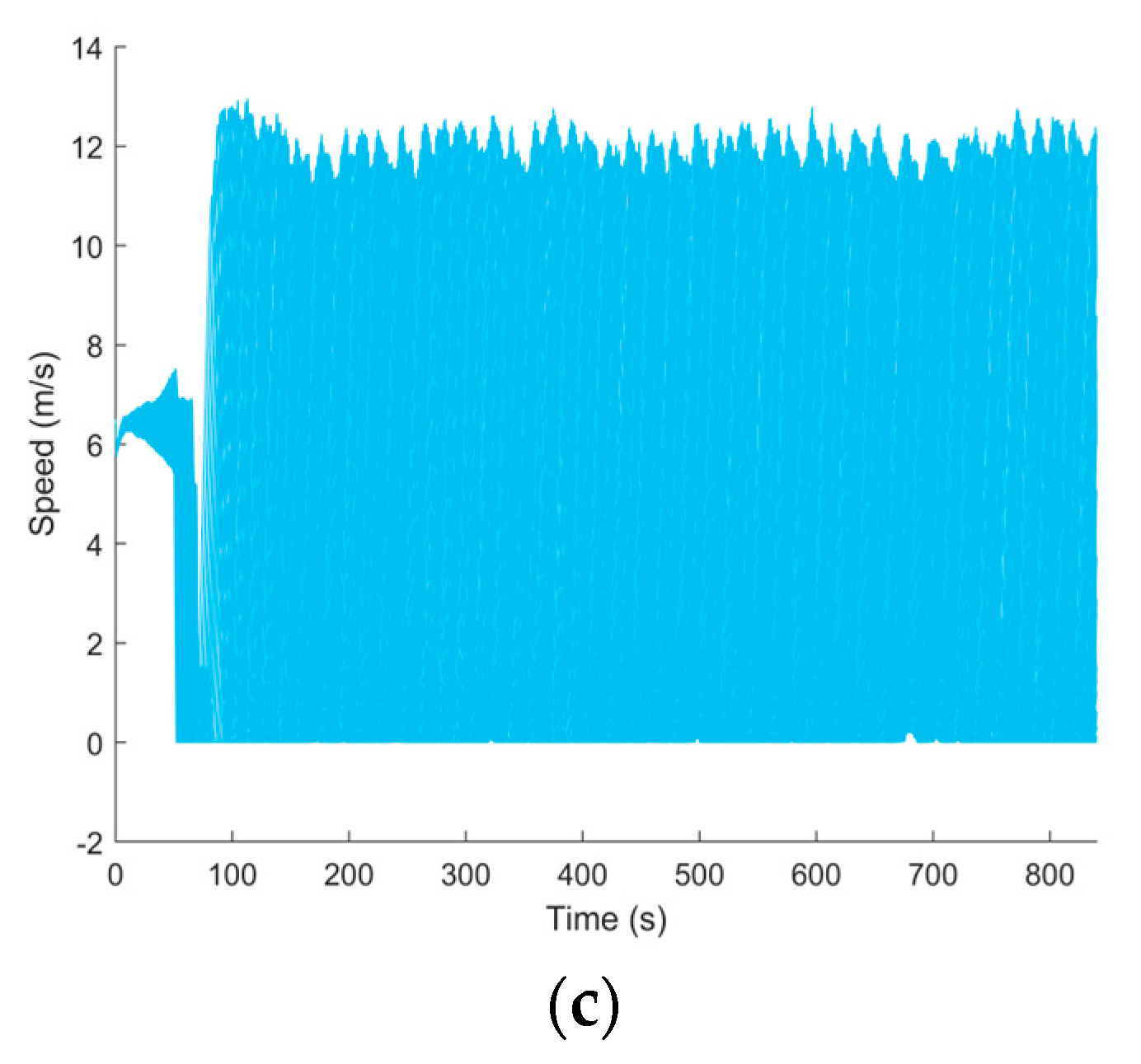
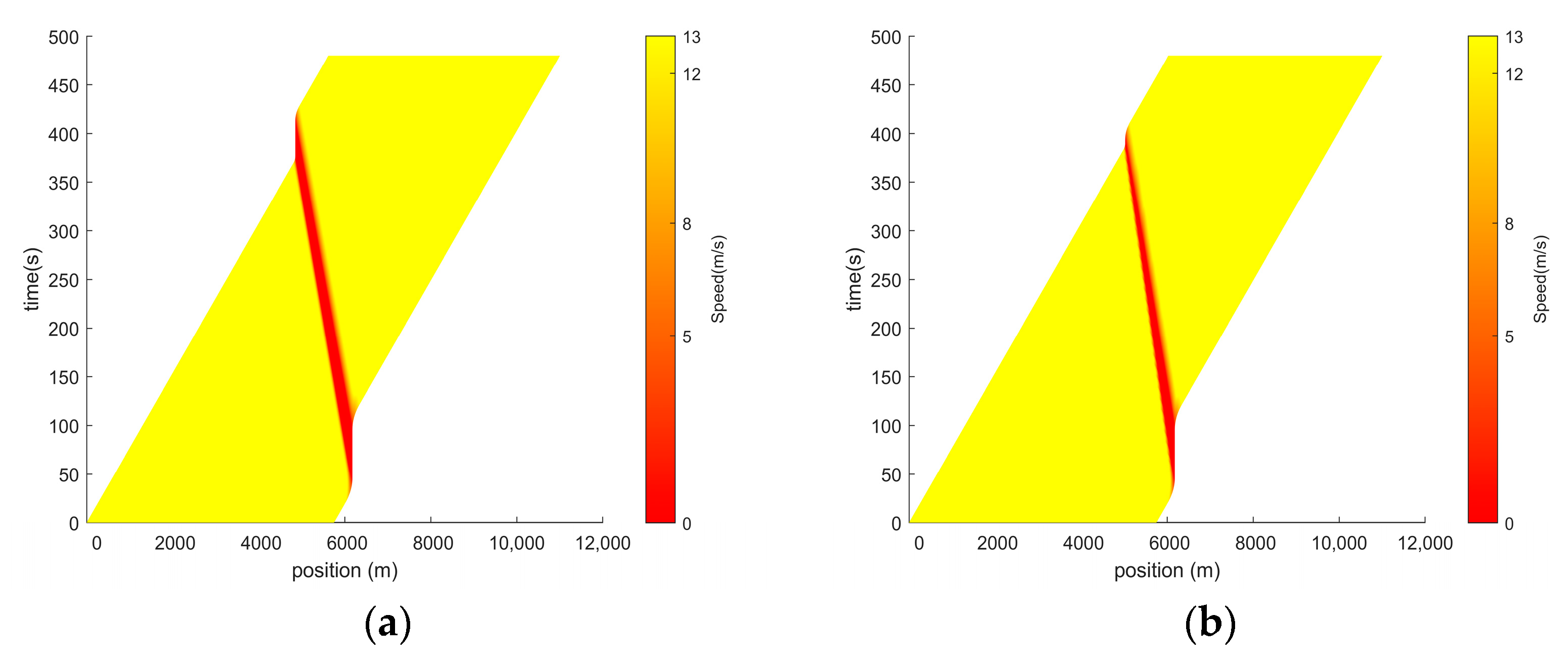
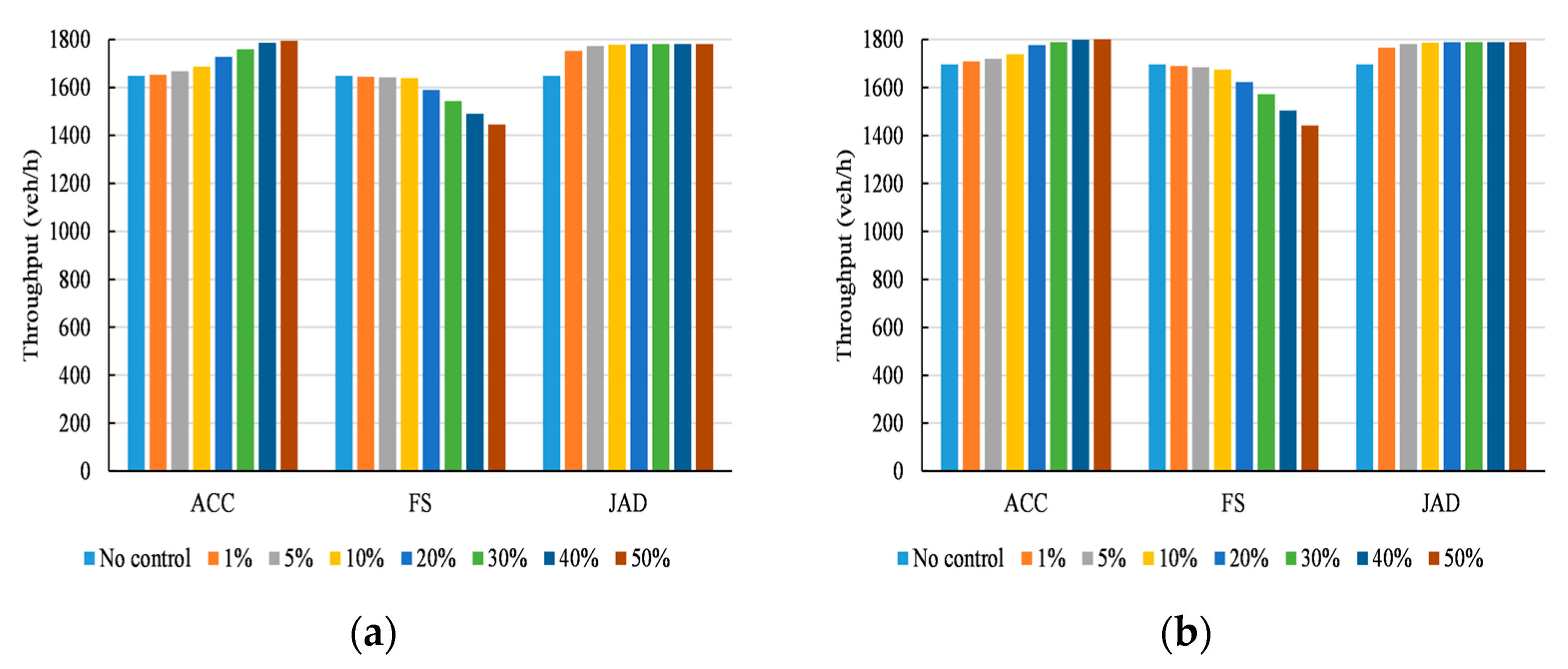
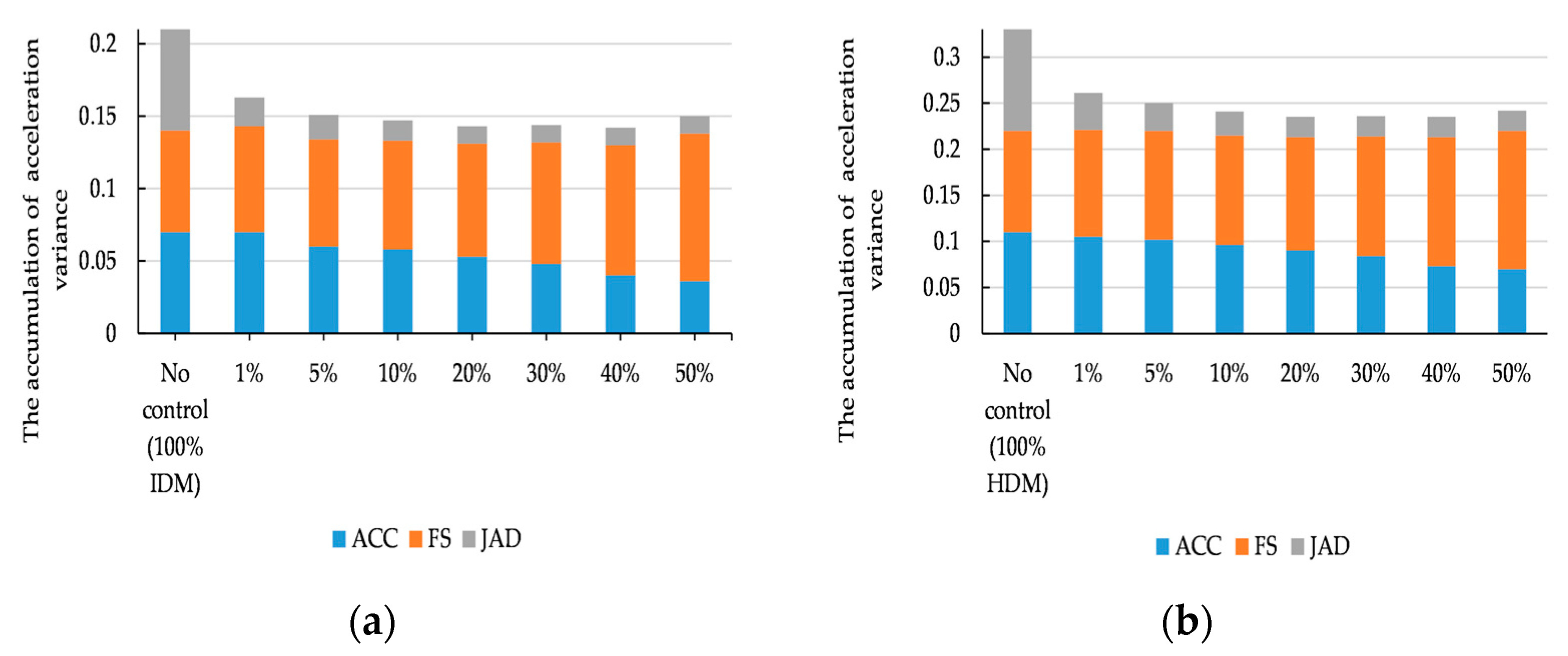
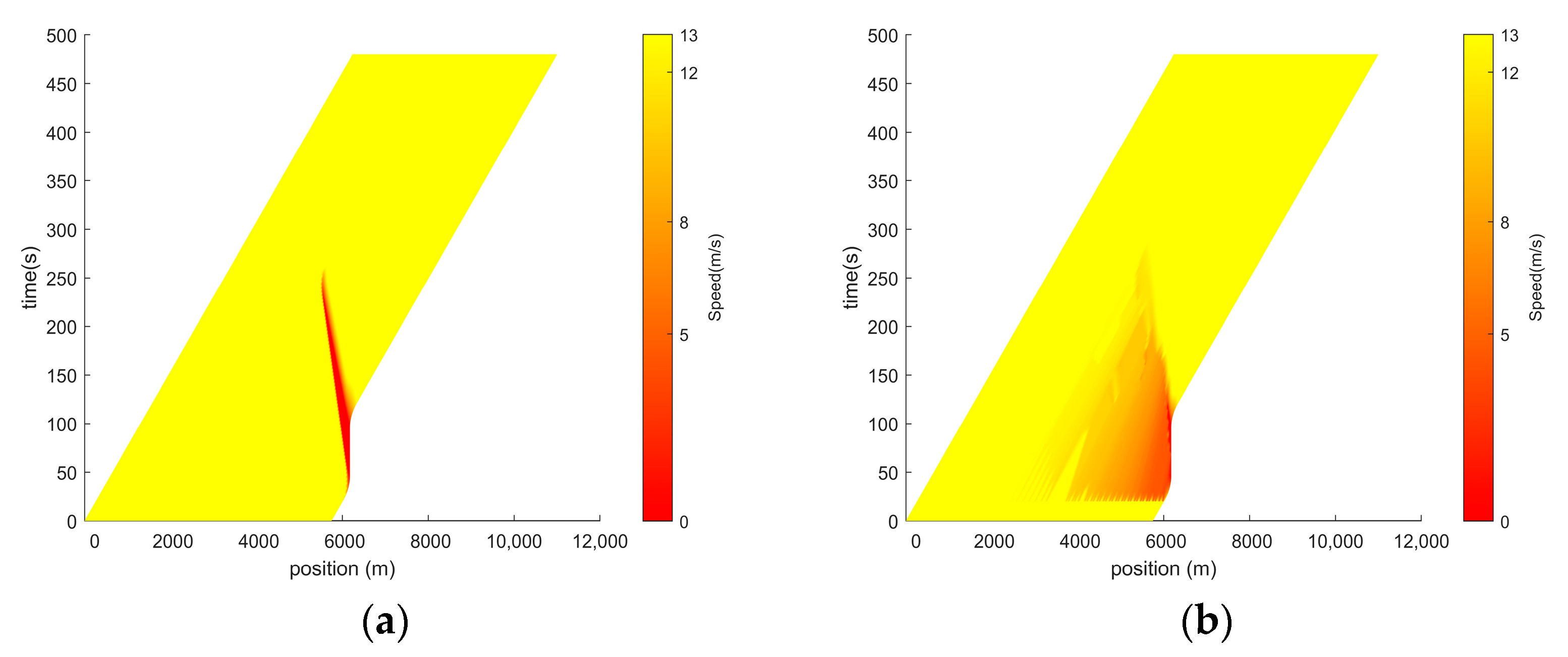
4.2. A Scenario with the Traffic Oscillation on the Freeway Stretch
4.2.1. A Guidance Vehicle
4.2.2. Multiple Guidance Vehicles
5. Conclusions and Further Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Human Driver Model (HDM)
Appendix A.2. CAV Model
Appendix B
Appendix B.1. Adaptive Cruise Control (ACC)
Appendix B.2. FollowerStopper (FS) Strategy

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 4.5 m | |
| 5.25 m | |
| 6.0 m | |
| 1.5 m/s2 | |
| 1.0 m/s2 | |
| 0.5 m/s2 | |
| U | 5 m/s |
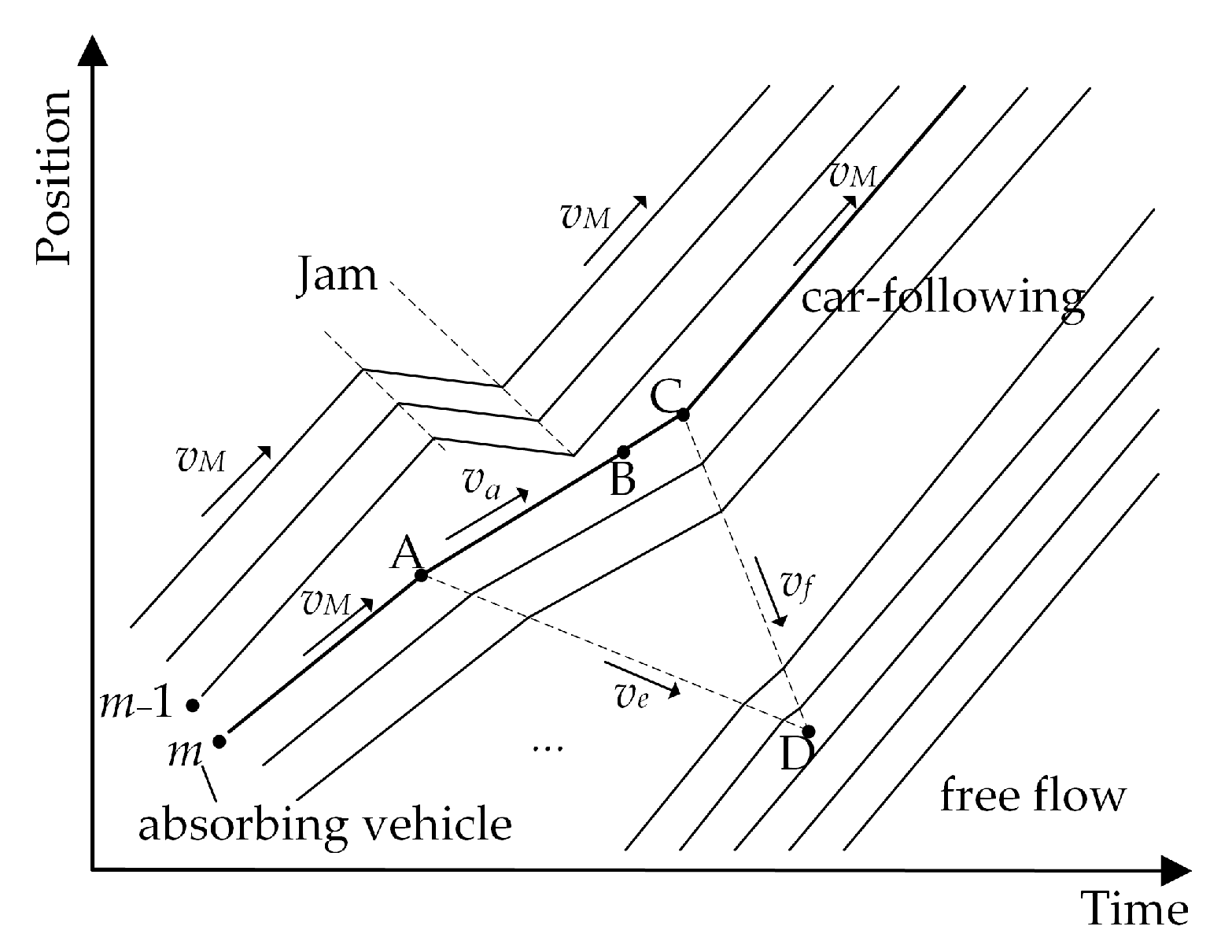
Appendix B.3. Jam-Absorption Driving (JAD)

References
- Almatar, K.M. Traffic congestion patterns in the urban road network: (Dammam metropolitan area). Ain Shams Eng. J. 2023, 14, 101886. [Google Scholar] [CrossRef]
- Li, X.; Cui, J.; An, S.; Parsafard, M. Stop-and-go traffic analysis: Theoretical properties, environmental impacts and oscillation mitigation. Transp. Res. Part B Methodol. 2014, 70, 319–339. [Google Scholar] [CrossRef]
- Zheng, S.T.; Jiang, R.; Tian, J.; Li, X.; Jia, B.; Gao, Z.; Yu, S. A comparison study on the growth pattern of traffic oscillations in car-following experiments. Transp. B Transp. Dyn. 2023, 11, 706–724. [Google Scholar] [CrossRef]
- Ahn, S.; Laval, J.; Cassidy, M.J. Effects of merging and diverging on freeway traffic oscillations: Theory and observation. Transp. Res. Rec. 2010, 2188, 1–8. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S. Capacity-drop at extended bottlenecks: Merge, diverge, and weave. Transp. Res. Part B Methodol. 2018, 108, 1–20. [Google Scholar] [CrossRef]
- Li, T.; Ngoduy, D.; Zhao, X. Hopf bifurcation analysis of mixed traffic and its implications for connected and autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6542–6557. [Google Scholar] [CrossRef]
- Li, X.; Peng, F.; Ouyang, Y. Measurement and estimation of traffic oscillation properties. Transp. Res. Part B Methodol. 2010, 44, 1–14. [Google Scholar] [CrossRef]
- Chen, D.; Laval, J.A.; Ahn, S.; Zheng, Z. Microscopic traffic hysteresis in traffic oscillations: A behavioral perspective. Transp. Res. Part B Methodol. 2012, 46, 1440–1453. [Google Scholar] [CrossRef]
- Han, Y.; Hegyi, A.; Yuan, Y.; Hoogendoorn, S.; Papageorgiou, M.; Roncoli, C. Resolving freeway jam waves by discrete first-order model-based predictive control of variable speed limits. Transp. Res. Part C Emerg. Technol. 2017, 77, 405–420. [Google Scholar] [CrossRef]
- Müller, E.R.; Carlson, R.C.; Kraus, W.; Papageorgiou, M. Microsimulation analysis of practical aspects of traffic control with variable speed limits. IEEE Trans. Intell. Transp. Syst. 2015, 16, 512–523. [Google Scholar] [CrossRef]
- Li, S.; Cao, D. Variable speed limit strategies’ analysis with cell transmission model on freeway. Mod. Phys. Lett. B 2017, 31, 1750219. [Google Scholar] [CrossRef]
- Grumert, E.; Ma, X.; Tapani, A. Analysis of a cooperative variable speed limit system using microscopic traffic simulation. Transp. Res. Part C Emerg. Technol. 2015, 52, 173–186. [Google Scholar] [CrossRef]
- van de Weg, G.S.; Hegyi, A.; Hoogendoorn, S.P.; De Schutter, B. Efficient freeway MPC by parameterization of ALINEA and a speed-limited area. IEEE Trans. Intell. Transp. Syst. 2018, 20, 16–29. [Google Scholar] [CrossRef]
- Hegyi, A.; Hoogendoorn, S.P. Dynamic speed limit control to resolve shock waves on freeways-Field test results of the SPECIALIST algorithm. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 519–524. [Google Scholar] [CrossRef]
- Papamichail, I.; Bekiaris-Liberis, N.; Delis, A.I.; Manolis, D.; Mountakis, K.S.; Nikolos, I.K.; Roncoli, C.; Papageorgiou, M. Motorway traffic flow modelling, estimation and control with vehicle automation and communication systems. Annu. Rev. Control 2019, 48, 325–346. [Google Scholar] [CrossRef]
- Roncoli, C.; Papageorgiou, M.; Papamichail, I. Traffic flow optimisation in presence of vehicle automation and communication systems-part II: Optimal control for multi-lane motorways. Transp. Res. Part C Emerg. Technol. 2015, 57, 260–275. [Google Scholar] [CrossRef]
- Roncoli, C.; Papageorgiou, M.; Papamichail, I. Traffic flow optimisation in presence of vehicle automation and communication systems-part I: A first-order multi-lane model for motorway traffic. Transp. Res. Part C Emerg. Technol. 2015, 57, 241–259. [Google Scholar] [CrossRef]
- Perraki, G.; Roncoli, C.; Papamichail, I.; Papageorgiou, M. Evaluation of a model predictive control framework for motorway traffic involving conventional and automated vehicles. Transp. Res. Part C Emerg. Technol. 2018, 92, 456–471. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Wang, H.; Wang, W.; Xing, L. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways. Accid. Anal. Prev. 2017, 104, 137–145. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Wang, W.; Xing, L.; Liu, S.; Wei, X. Evaluation of the impacts of cooperative adaptive cruise control on reducing rear-end collision risks on freeways. Accid. Anal. Prev. 2017, 98, 87–95. [Google Scholar] [CrossRef]
- Nishi, R.; Tomoeda, A.; Shimura, K.; Nishinari, K. Theory of jam-absorption driving. Transp. Res. Part B Methodol. 2013, 50, 116–129. [Google Scholar] [CrossRef]
- Taniguchi, Y.; Nishi, R.; Ezaki, T.; Nishinari, K. Jam-absorption driving with a car-following model. Phys. A Stat. Mech. Its Appl. 2015, 433, 304–315. [Google Scholar] [CrossRef]
- He, Z.; Zheng, L.; Song, L.; Zhu, N. A jam-absorption driving strategy for mitigating traffic oscillations. IEEE Trans. Intell. Transp. Syst. 2016, 18, 802–813. [Google Scholar] [CrossRef]
- Tian, J.; Zhu, C.; Chen, D.; Jiang, R.; Wang, G.; Gao, Z. Car following behavioral stochasticity analysis and modeling: Perspective from wave travel time. Transp. Res. Part B Methodol. 2021, 143, 160–176. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, G.; Li, Y.; Li, Z. Optimal jam-absorption driving strategy for mitigating rear-end collision risks with oscillations on freeway straight segments. Accid. Anal. Prev. 2020, 135, 105367. [Google Scholar] [CrossRef]
- Nishi, R. Theoretical conditions for restricting secondary jams in jam-absorption driving scenarios. Phys. A Stat. Mech. Its Appl. 2020, 542, 123393. [Google Scholar] [CrossRef]
- Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Pohlmann, H.; Wu, F.; Piccoli, B.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef]
- Zheng, F.; Lu, L.; Li, R.; Liu, X.; Tang, Y. Traffic oscillation using stochastic lagrangian dynamics: Simulation and mitigation via control of autonomous vehicles. Transp. Res. Rec. 2019, 2673, 1–11. [Google Scholar] [CrossRef]
- Nateeboon, T.; Tawabutr, H.; Termsaithong, T.; Hirunsirisawat, E. Ability to damp traffic wave when controlling every car on the road by FollowerStopper controller. In Proceedings of the Journal of Physics: Conference Series, Siam Physics Congress 2018 (SPC2018), Pitsanulok, Thailand, 21–23 May 2018. [Google Scholar] [CrossRef]
- Cummins, L.; Sun, Y.; Reynolds, M. Simulating the effectiveness of wave dissipation by FollowerStopper autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2021, 123, 102954. [Google Scholar] [CrossRef]
- Nygren, J.; Boij, S.; Rumpler, R.; O’Reilly, C.J. Vehicle-specific noise exposure cost: Noise impact allocation methodology for microscopic traffic simulations. Transp. Res. Part D Transp. Environ. 2023, 118, 103712. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805. [Google Scholar] [CrossRef] [PubMed]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics: Data, Models and Simulation, 2013th ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 1–505. [Google Scholar] [CrossRef]
- Dias, J.E.A.; Pereira, G.A.S.; Palhares, R.M. Longitudinal model identification and velocity control of an autonomous car. IEEE Trans. Intell. Transp. Syst. 2014, 16, 776–786. [Google Scholar] [CrossRef]
- Das, S.; Maurya, A.K. Defining time-to-collision thresholds by the type of lead vehicle in non-lane-based traffic environments. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4972–4982. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef]
- Bekiaris-Liberis, N.; Roncoli, C.; Papageorgiou, M. Predictor-based adaptive cruise control design. IEEE Trans. Intell. Transp. Syst. 2017, 19, 3181–3195. [Google Scholar] [CrossRef]
- Bhadani, R.K.; Piccoli, B.; Seibold, B.; Sprinkle, J.; Work, D. Dissipation of emergent traffic waves in stop-and-go traffic using a supervisory controller. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami Beach, FL, USA, 17–19 December 2018; pp. 3628–3633. [Google Scholar] [CrossRef]
- Bhadani, R.; Bunting, M.; Seibold, B.; Stern, R.; Cui, S.; Sprinkle, J.; Work, D.B. Real-time distance estimation and filtering of vehicle headways for smoothing of traffic waves. In Proceedings of the 10th ACM/IEEE International Conference on Cyber-Physical Systems, Montreal, QC, Canada, 16–18 April 2019; pp. 280–290. [Google Scholar] [CrossRef]
- Wang, S.; Li, Z.; Cao, Z.; Jolfaei, A.; Cao, Q. Jam-absorption driving strategy for improving safety near oscillations in a connected vehicle environment considering consequential jams. IEEE Intell. Transp. Syst. Mag. 2021, 14, 41–52. [Google Scholar] [CrossRef]













| Parameters | Value |
|---|---|
| Desired speed v0 | 33.3 m/s |
| Time gap T | 1 s |
| Minimum gap s0 | 2 m |
| Acceleration exponent δ | 4 |
| Maximum acceleration α | 1.0 m/s2 |
| Comfortable deceleration b | 1.5 m/s2 |
| Parameters | Value |
|---|---|
| Reaction time Tr | 0.6 s |
| Variation coefficient of gap estimation error Vs | 10% |
| Estimation error for the inverse TTC σr | 0.01 s−1 |
| Persistence time of the estimation errors | 20 s |
| Simulation Scenario | Penetration Rates of CAVs | Number of CAVs | The Vehicle ID of the Guidance Vehicles (CAVs) |
|---|---|---|---|
| 1 | 4% | 1 | 19 |
| 2 | 9% | 2 | 19, 21 |
| 3 | 10% | 3 | 15, 17, 19 |
| 4 | 20% | 5 | 12, 14, 15, 17, 19 |
| 5 | 30% | 7 | 8, 10, 12, 14, 15, 17, 19 |
| 6 | 40% | 9 | 5, 6, 8, 10, 12, 14, 15, 17, 19 |
| 7 | 50% | 11 | 2, 3, 5, 6, 8, 10, 12, 14, 15, 17, 19 |
| Simulation Scenario | Penetration Rates of CAVs | Number of CAVs | The Vehicle ID of the Guidance Vehicles (CAVs) |
|---|---|---|---|
| 1 | 1% | 1 | 40 |
| 2 | 5% | 10 | 2, 20, 50, 80, 100, 112, 130, 152, 170, 190 |
| 3 | 10% | 20 | 2, 10, 22, 40, 50, 70, 80, 90, 98, 100, 110, 120, 130, 138, 140, 150, 162, 174, 180, 190 |
| 4 | 20% | 40 | 2, 6, 10, 18, 22, 28, 30, 36, 40, 42, 48, 50, 54, 62, 66, 70, 74, 80, 90, 94, 98, 100, 108, 110, 114, 120, 124, 130, 138, 140, 146, 150, 154, 162, 168, 174, 180, 188, 190, 198 |
| 5 | 30% | 60 | 2, 6, 10, 14, 18, 22, 26, 28, 30, 34, 36, 40, 42, 48, 50, 54, 62, 66, 70, 74, 80, 84, 86, 90, 94, 98, 100, 106, 108, 110, 114, 116, 120, 124, 128, 130, 136, 138, 140, 142, 146, 148, 150, 154, 158, 162, 164, 168, 170, 174, 176, 178, 180, 182, 188, 190, 192, 194, 198, 199 1 |
| 6 | 40% | 80 | 2, 6, 10, 14, 18, 22, 24, 26, 28, 30, 34, 36, 40, 42, 46, 48, 50, 52, 54, 58, 62, 64, 66, 68, 70, 74, 78, 80, 82, 84, 86, 88, 90, 94, 96, 98, 100, 102, 106, 108, 110, 112, 114, 116, 118, 120, 124, 126, 128, 130, 134, 136, 138, 140, 142, 146, 148, 150, 152, 154, 158, 160, 162, 164, 166, 168, 170, 172, 174, 176, 178, 180, 182, 184, 188, 190, 192, 194, 198, 199 |
| 7 | 50% | 100 | 2, 4, 6, 8, 10, 12, 14, 16, 18, 20, 22, 24, 26, 28, 30, 32, 34, 36, 38, 40, 42, 44, 46, 48, 50, 52, 54, 56, 58, 60, 62, 64, 66, 68, 70, 72, 74, 76, 78, 80, 82, 84, 86, 88, 90, 92, 94, 96, 98, 100, 102, 104, 106, 108, 110, 112, 114, 116, 118, 120, 122, 124, 126, 128, 130, 132, 134, 136, 138, 140, 142, 144, 146, 148, 150, 152, 154, 156, 158, 160, 162, 164, 166, 168, 170, 172, 174, 176, 178, 180, 182, 184, 186, 188, 190, 192, 194, 196, 198, 199 |
| Modes | Average Speed (m/s) | Speed Standard Deviation (m/s) | Throughput (veh/h) |
|---|---|---|---|
| No control (IDM) | 3.64 | 3.71 | 1060 |
| ACC-IDM | 3.68 | 3.68 | 1069 |
| FS-IDM | 4.65 | 1.54 | 1353 |
| JAD-IDM | 3.79 | 3.35 | 1103 |
| Modes | Average Speed (m/s) | Speed Standard Deviation (m/s) | Throughput (veh/h) |
|---|---|---|---|
| No control (HDM) | 4.46 | 2.66 | 1298 |
| ACC-HDM | 4.56 | 2.60 | 1326 |
| FS-HDM | 5.58 | 1.14 | 1623 |
| JAD-HDM | 4.71 | 2.31 | 1370 |
| Modes | The Percentage Change in TET and TIT | |
|---|---|---|
| TET (%) | TIT (%) | |
| No control | 0 | 0 |
| ACC-IDM | −4.11 | −4.11 |
| FS-IDM | −35.36 | −35.91 |
| JAD-IDM | −7.49 | −7.52 |
| ACC-HDM | −5.57 | −5.95 |
| FS-HDM | −33.01 | −33.54 |
| JAD-HDM | −8.58 | −8.86 |
| Modes | The Penetration Rates of CAVs | ||||||
|---|---|---|---|---|---|---|---|
| 4% | 9% | 10% | 20% | 30% | 40% | 50% | |
| No control | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| ACC-IDM | 0.85 | 5.66 | 13.02 | 15.66 | 20.66 | 22.64 | 23.58 |
| FS-IDM | 27.64 | 58.02 | 50.94 | 46.23 | 37.27 | 28.11 | 10.47 |
| JAD-IDM | 4.06 | 28.11 | 40 | 49.43 | 51.74 | 51.92 | 51.92 |
| ACC-HDM | 2.16 | 7.32 | 15.02 | 18.03 | 22.03 | 25.04 | 32.06 |
| FS-HDM | 25.04 | 53.00 | 48.07 | 44.09 | 34.05 | 26.04 | 7.94 |
| JAD-HDM | 5.55 | 30.05 | 43.07 | 51.00 | 51.89 | 52.15 | 52.16 |
| Modes | The Penetration Rates of CAVs | ||||||
|---|---|---|---|---|---|---|---|
| 4% | 9% | 10% | 20% | 30% | 40% | 50% | |
| No control | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| ACC-IDM | 0.81 | 7.01 | 9.97 | 18.06 | 28.03 | 41.24 | 53.91 |
| FS-IDM | 58.49 | 64.42 | 65.15 | 65.50 | 64.69 | 61.46 | 59.57 |
| JAD-IDM | 9.70 | 25.34 | 39.35 | 59.84 | 60.92 | 61.88 | 61.89 |
| ACC-HDM | 2.26 | 10.15 | 15.04 | 22.18 | 33.83 | 50.00 | 57.89 |
| FS-HDM | 57.14 | 59.77 | 62.03 | 63.91 | 63.16 | 60.15 | 57.89 |
| JAD-HDM | 13.16 | 30.08 | 48.12 | 60.91 | 62.29 | 62.41 | 62.42 |
| The Proportion of CAVs (%) | The Reduction in TET (%) | The Reduction in TIT (%) | ||||
|---|---|---|---|---|---|---|
| ACC | FS | JAD | ACC | FS | JAD | |
| 4 | 2.11 | 28.77 | 7.35 | 2.97 | 28.95 | 7.68 |
| 9 | 12.47 | 42.21 | 20.13 | 12.35 | 42.43 | 20.37 |
| 10 | 21.54 | 62.55 | 29.26 | 21.54 | 62.91 | 29.15 |
| 20 | 32.75 | 71.80 | 39.38 | 32.36 | 71.82 | 39.57 |
| 30 | 40.26 | 55.04 | 47.65 | 40.48 | 55.22 | 47.84 |
| 40 | 45.35 | 44.67 | 60.30 | 45.22 | 44.67 | 60.28 |
| 50 | 56.59 | 31.68 | 60.30 | 56.87 | 31.45 | 60.17 |
| The Proportion of CAVs (%) | The Reduction in TET (%) | The Reduction in TIT (%) | ||||
|---|---|---|---|---|---|---|
| ACC | FS | JAD | ACC | FS | JAD | |
| 4 | 5.74 | 24.79 | 7.94 | 5.80 | 24.93 | 8.22 |
| 9 | 20.67 | 40.01 | 25.34 | 20.44 | 40.47 | 25.22 |
| 10 | 26.44 | 57.43 | 36.75 | 26.44 | 57.79 | 36.75 |
| 20 | 38.55 | 70.73 | 44.70 | 38.31 | 70.97 | 44.85 |
| 30 | 46.75 | 53.27 | 52.71 | 46.35 | 53.56 | 52.66 |
| 40 | 53.59 | 42.75 | 61.91 | 53.34 | 42.74 | 61.90 |
| 50 | 58.72 | 30.87 | 61.91 | 58.81 | 30.38 | 61.90 |
| Modes | Spatial-Temporal Average Speed (m/s) | Average Speed Standard Deviation (m/s) | Throughput (veh/h) |
|---|---|---|---|
| No control (IDM) | 11.39 | 4.12 | 1648 |
| ACC-IDM | 11.41 | 4.06 | 1652 |
| FS-IDM | 11.36 | 4.15 | 1645 |
| JAD-IDM | 12.11 | 2.55 | 1752 |
| No control (HDM) | 11.79 | 3.59 | 1706 |
| ACC-HDM | 11.81 | 3.55 | 1709 |
| FS-HDM | 11.68 | 3.74 | 1690 |
| JAD-HDM | 12.20 | 2.46 | 1766 |
| Modes | The Percentage Change in TET and TIT | |
|---|---|---|
| TET (%) | TIT (%) | |
| No control | 0 | 0 |
| ACC-IDM | −6.01 | −6.11 |
| FS-IDM | 1.36 | 1.91 |
| JAD-IDM | −7.49 | −7.52 |
| ACC-HDM | −5.88 | −5.89 |
| FS-HDM | 1.79 | 1.22 |
| JAD-HDM | −7.40 | −7.40 |
| The Proportion of CAVs (%) | 1 | 5 | 10 | 20 | 30 | 40 | 50 | |
|---|---|---|---|---|---|---|---|---|
| The variation in speed standard deviation (%) | ACC-IDM | −1.46 | −3.89 | −8.01 | −18.20 | −26.21 | −34.22 | −36.65 |
| FS-IDM | 0.73 | 3.40 | 6.07 | 7.04 | 14.08 | 21.26 | 26.70 | |
| JAD-IDM | −38.11 | −52.67 | −53.40 | −54.37 | −54.37 | −54.13 | −54.37 | |
| ACC-HDM | −1.11 | −3.62 | −7.24 | −18.10 | −22.84 | −24.23 | −27.30 | |
| FS-HDM | 0.14 | 3.90 | 7.52 | 8.64 | 26.63 | 37.33 | 45.96 | |
| JAD-HDM | −31.47 | −46.52 | −47.63 | −48.19 | −48.19 | −47.91 | −48.19 | |
| The Proportion of CAVs (%) | The Reduction in TET (%) | The Reduction in TIT (%) | ||||
|---|---|---|---|---|---|---|
| ACC | FS | JAD | ACC | FS | JAD | |
| 1 | −6.01 | 1.36 | −7.49 | −6.11 | 1.91 | −7.52 |
| 5 | −26.31 | 3.98 | −27.02 | −26.61 | 3.98 | −27.31 |
| 10 | −50.47 | 6.77 | −51.18 | −50.47 | 6.78 | −51.17 |
| 20 | −56.89 | 13.01 | −57.46 | −57.32 | 13.12 | −57.49 |
| 30 | −62.22 | 18.89 | −63.78 | −63.34 | 18.98 | −63.89 |
| 40 | −65.38 | 25.11 | −66.77 | −65.32 | 25.11 | −66.61 |
| 50 | −68.79 | 34.57 | −69.43 | −68.83 | 35.69 | −69.40 |
| The Proportion of CAVs (%) | The Reduction in TET (%) | The Reduction in TIT (%) | ||||
|---|---|---|---|---|---|---|
| ACC | FS | JAD | ACC | FS | JAD | |
| 1 | −5.88 | 1.79 | −7.40 | −5.89 | 1.94 | −7.42 |
| 5 | −25.76 | 4.11 | −26.77 | −25.49 | 4.10 | −26.45 |
| 10 | −48.71 | 7.11 | −49.65 | −48.71 | 7.09 | −49.64 |
| 20 | −55.70 | 13.79 | −56.79 | −55.53 | 13.96 | −56.81 |
| 30 | −60.79 | 19.22 | −61.57 | −61.36 | 19.53 | −61.86 |
| 40 | −63.79 | 26.71 | −64.93 | −63.70 | 26.71 | −64.90 |
| 50 | −66.72 | 35.97 | −67.46 | −66.81 | 36.27 | −67.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Roncoli, C.; Zhao, W.; Ju, Y. Assessing the Impact of CAV Driving Strategies on Mixed Traffic on the Ring Road and Freeway. Sustainability 2024, 16, 3179. https://doi.org/10.3390/su16083179
Li H, Roncoli C, Zhao W, Ju Y. Assessing the Impact of CAV Driving Strategies on Mixed Traffic on the Ring Road and Freeway. Sustainability. 2024; 16(8):3179. https://doi.org/10.3390/su16083179
Chicago/Turabian StyleLi, Haizhen, Claudio Roncoli, Weiming Zhao, and Yongfeng Ju. 2024. "Assessing the Impact of CAV Driving Strategies on Mixed Traffic on the Ring Road and Freeway" Sustainability 16, no. 8: 3179. https://doi.org/10.3390/su16083179
APA StyleLi, H., Roncoli, C., Zhao, W., & Ju, Y. (2024). Assessing the Impact of CAV Driving Strategies on Mixed Traffic on the Ring Road and Freeway. Sustainability, 16(8), 3179. https://doi.org/10.3390/su16083179