

Novel ‘Closed’-System Approach for Monitoring the Technical Condition of Railway Tracks



Abstract
:1. Introduction
- Study, definition, and classification of its condition and symptoms as signs of manifestation of a process;
- Design of methods for the detection of symptoms;
- Selection of monitoring and measurement equipment;
- Forecasting of changes occurring in the track structure under the action of rolling stock, atmospheric, and other conditions, as well as changes depending on the duration of operation;
- Determination of the periodicity of tests.
- Natural indicators of elasticity of the railway track;
- Geometric indicators of the condition monitoring of the railway track structure or similar indicators obtained by numerical processing of data from the measurement systems of the track measuring car.
- Characterization, significance, and scope of application;
- Analysis of tolerances or other limit values;
- Test or measurement methods, equipment, and measuring equipment used;
- Precautions related to the process of change of the parameter under investigation and facilitating the prediction of behavior.
- Implementation of ‘awareness’ dimensions;
- Applicability of the method for high-speed traffic and freight traffic at different axial loads;
- The possibility of estimating the elastic dissipative characteristics of track and rolling stock structures;
- Possibility of estimating stiffness parameters both separately for the elements and the whole ‘rolling stock–track’ system.
2. Theoretical Basis for a ‘Closed’ Measurement System
- Formation of its geometry, implementing the respective route (in terms of both plan and profile);
- Ensuring the geometry of the position of the two rail threads relative to each other;
- Provision of certain relations between the force loads of the rolling stock and their corresponding bearing areas and the stiffness of the track structure elements;
- Ensuring the possibility of physical processes in the design of a jointless railway track due to changes in the properties of rail metal under the action of temperatures.
- Set of elements comprising the system and the change in their numbers over time;
- Functions that determine the correspondence between the elements of a set over time;
- Representation of the set of states between interacting and/or interrelated elements of the set.
- Statistical changes, the parameters of which are easily calculated analytically, with their change over time predictable without any particular problems, since they are practically constant within the framework of the investigation;
- Quasi-dynamic changes, the parameters of which are calculated using differential or integral calculus, since the general character of parameter change has clear regularities within a fixed time interval. Therefore, it is easy to specify a function to describe these regularities. The character of parameter change, however, depends on the real-time rate of physical process (the rate of energy change in the system), and the adopted simplifications of the theories employed do not allow for creating analytical dependencies for universal solutions;
- Dynamic changes, the parameters of which change without visible regularity. In this case, the nature of parameter change depends on the real-time rate of the physical process (the rate of energy change in the system). Therefore, the theoretical basis for solving such problems is based purely on the description of certain fragmentary phenomena, with the application of simplifications adopted for special cases of a certain class of problems.
- Modern technical means register parameter change in complex dynamic systems faster than predicting the changes on the basis of the elasticity theory provisions, which are hardwired in all methods and approaches of both theoretical and experimental studies of the functioning of the railway track. Therefore, there is a dilemma between obtaining the ‘true value of a physical parameter’ and the ‘actual value of a physical parameter’;
- At present, there is a tendency to outpace the development of intellectual technologies that are based on knowledge extraction and management. The initial information used in the decision-making process is actualized and intellectualized in different subject areas, with further transition to automation of the decision-making process. This is implemented through the development of correct mathematical models and methods of modeling information systems to solve optimization problems.
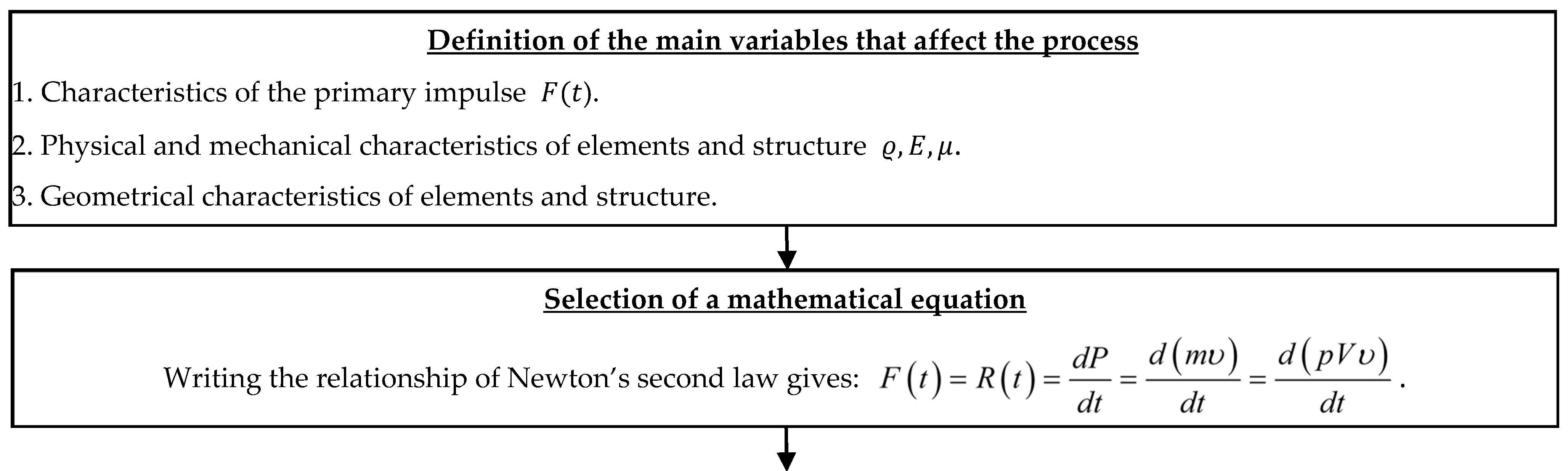
- The law of change of the impact value over time , where is a variable value per unit of time ;
- Direction of impact;
- Time of impact;
- Impact location with defined geometric boundaries and contact area.
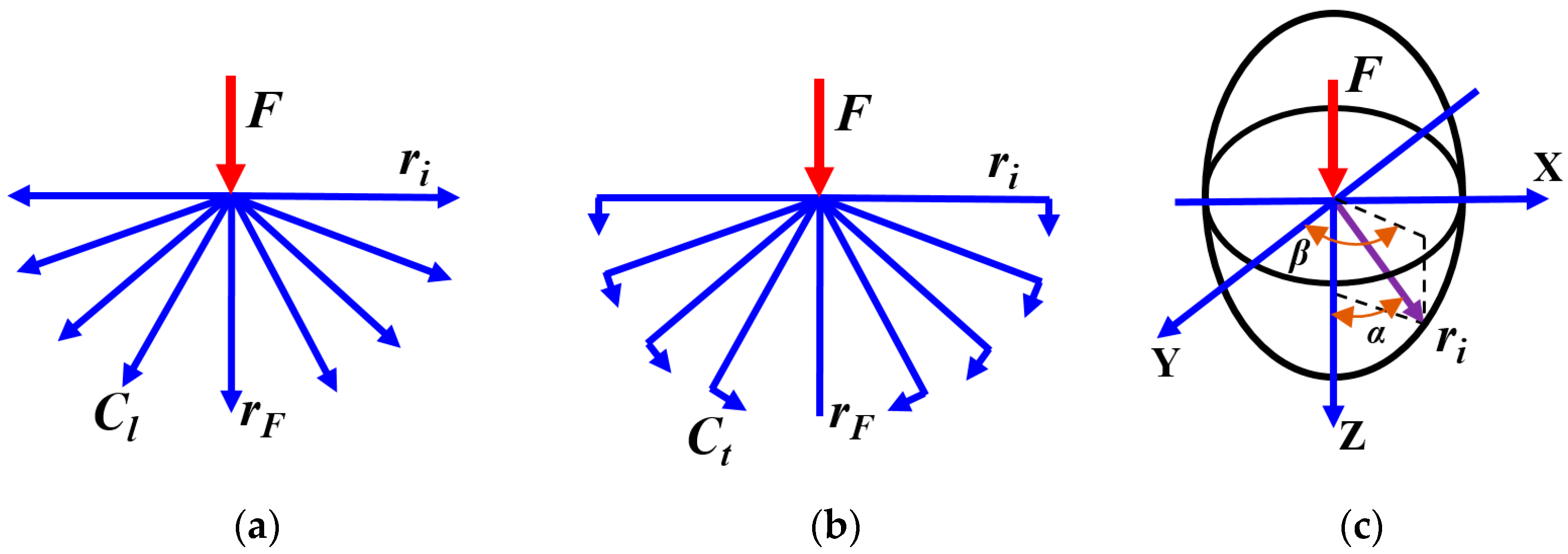
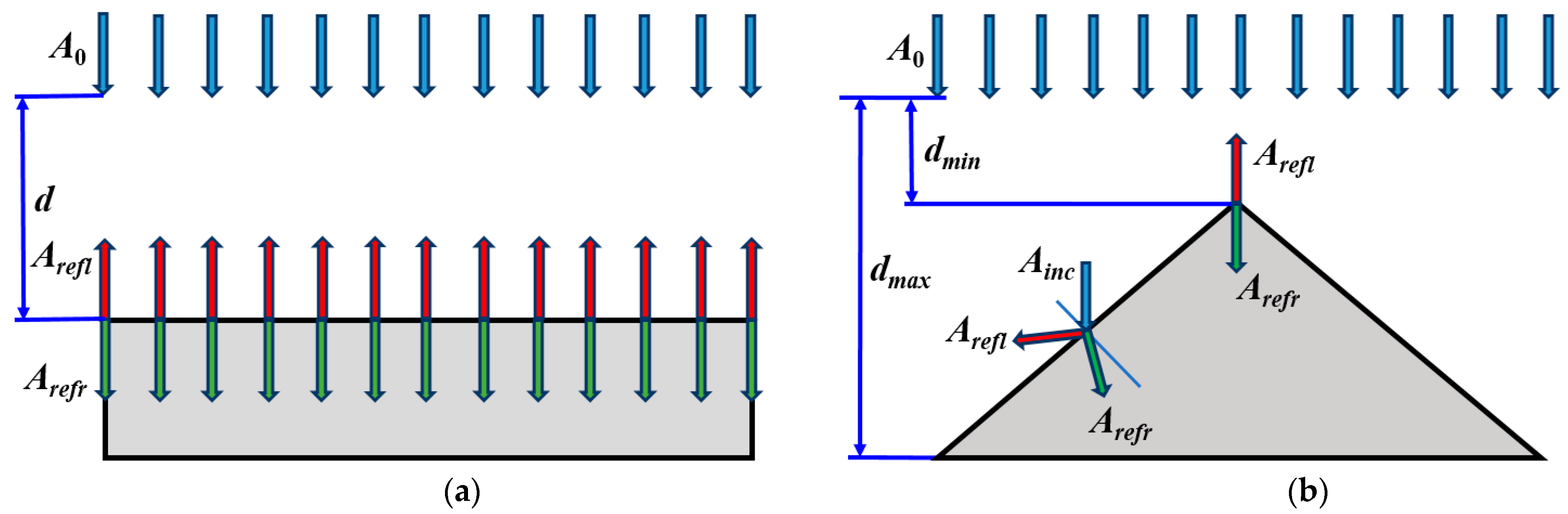
- The vector of velocity of a divergent spherical wave is directed radially away from the source (the wave diverges radially from the source), while that of a convergent wave is directed towards the source;
- The amplitude of the spherical wave decreases from the source with increasing distance to the observation point, i.e., it is inversely proportional to the distance to the source.
- Describing the geometry of spherical wave propagation in time in all directions;
- Taking into account the speed of wave propagation in all directions;
- Taking into account the geometry of the objects in which the wave propagation took place as a factor in the emergence of new impulses from the chains of incidence–reflection–refraction waves;
- Description of the primary impulse as a function of the change in load in time during the action period;
- Consideration of the property of spherical waves to transfer impulses (change amplitudes) during propagation;
- Description of the superposition of waves in time and space as a factor of dissipation in the formation of the deformability process.
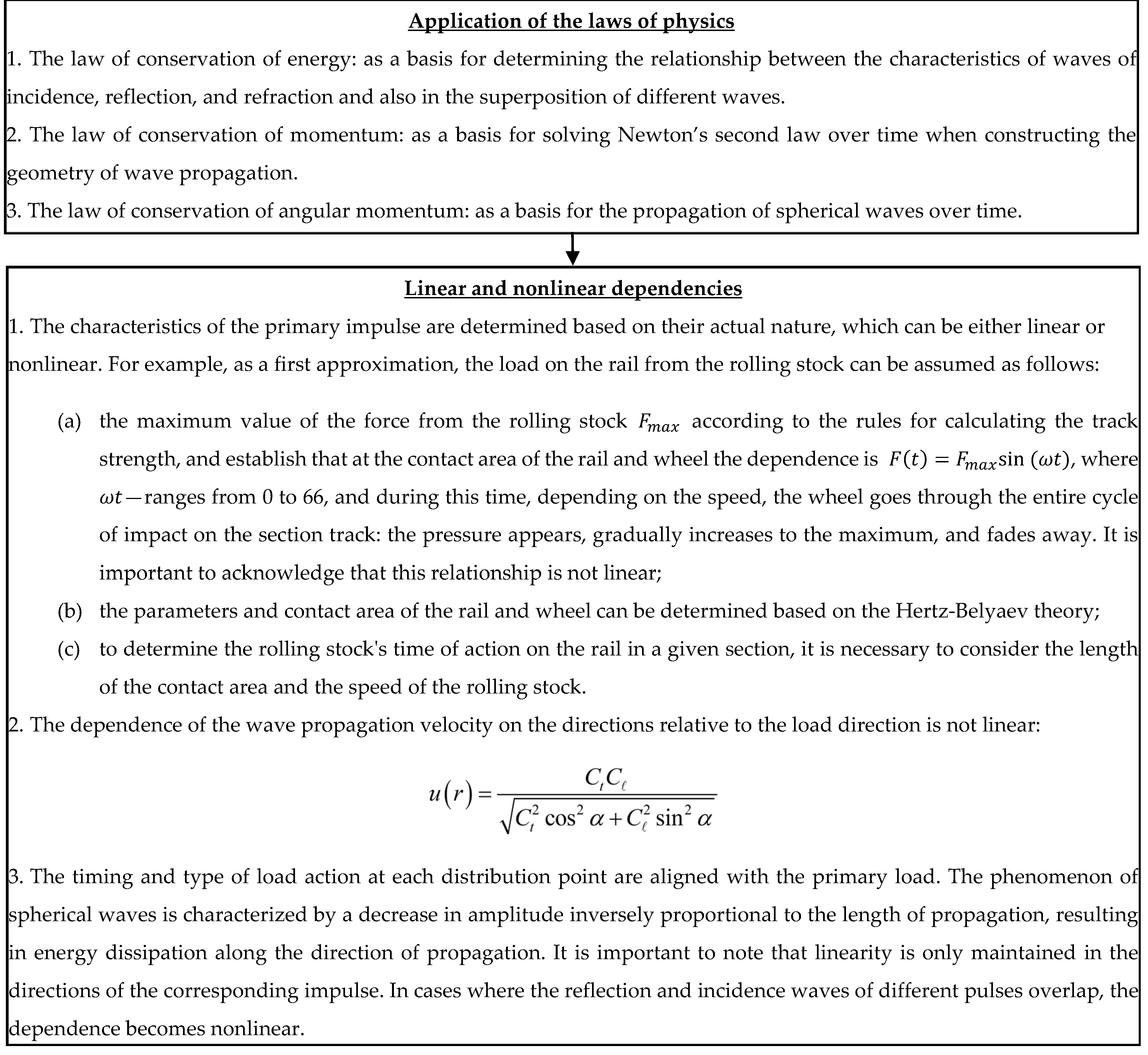
- Elastic waves propagate energy naturally;
- The energy is proportional to the square of the amplitude of the waves, indicating that the presence or absence of sufficient energy directly impacts the observed changes in natural phenomena. The nature of wave propagation determines the processes of deformability, which refer to changes in geometric, physical, and mechanical parameters in response to physical factors such as thermal, aqueous, acoustic, electrical, gravitational, and radiation (nuclear, X-ray, etc.);
- Adhering to the regulated parameters of waves during their superposition is crucial for ensuring the proper functioning of elements and structures. These parameters, including elasticity, stiffness, dissipation, and inertia, are indicative of natural phenomena or processes of change observed during testing. By following these requirements in accordance with operating conditions, we can ensure optimal performance and reliability;
- The study of elastic wave propagation in time and space establishes the cause-and-effect relationship of dynamic stiffness values. This considers the elastic–dissipative characteristics of track structure materials, the geometry of each track structure element, and the relationship between the time of load action (which depends on the speed of movement) and the time of load absorption by each element;
- The analysis of elastic wave propagation in time and space determines the dynamic stiffness of objects under various dynamic loads and identifies the causes of these effects.
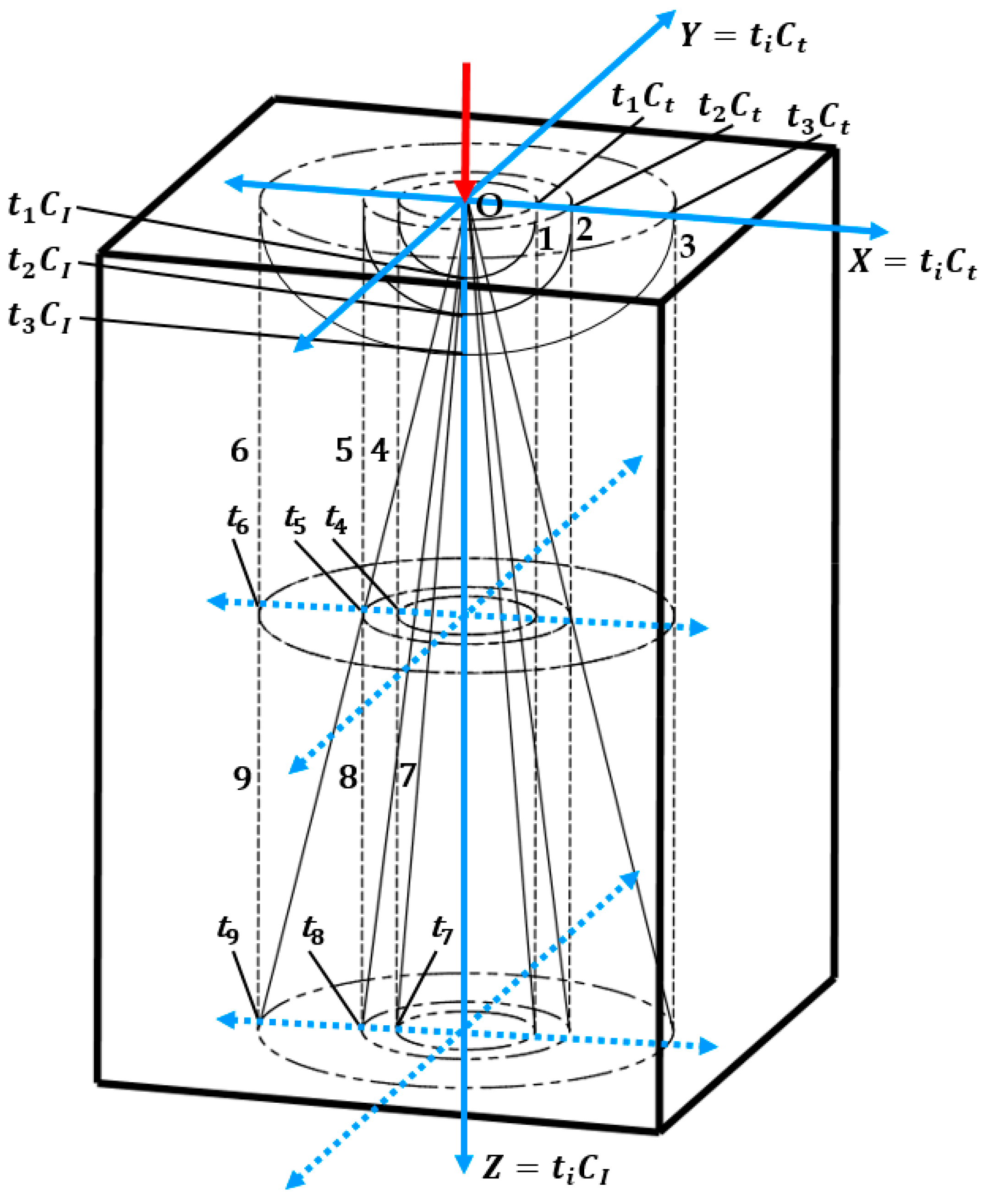
- The ellipsoids’ surfaces 1, 2, and 3 clearly illustrate the spatial front of wave propagation and the equipotential surfaces of amplitudes, forces, momentums, and energy at times , , and .
- Cylinders 4, 5, and 6 with radii , , and exhibit equipotential surfaces of moments of forces concerning the direction of force action from times t1 to t9 with confidence.
- Circles with radii , , and unequivocally represent isolines (contour lines) of moments of forces relative to point O. These circles are located on the surface perpendicular to the direction of load action at times , , and .
- The cone surfaces 7, 8, and 9 with the vertex at point O and the axis in the direction of force represent equipotential surfaces of angular momentum at times , , and .
3. Evaluation of The System of Traditional Approaches, Methods, and Techniques for Determining, Measuring, and Evaluating Parameters of Railway Track Condition Monitoring in Terms of ‘Awareness’
3.1. Analysis of Current Modeling Concept Problems
- ‘Recent decades have shown a certain evolution of approaches to monitoring the condition of various rail transport systems, especially in the context of rail vehicles and track subsystems. The approaches applied to the monitoring of the condition of the rail infrastructure have evolved from manual maintenance, through methods connected to the application of sensors, to the currently discussed today focused on the terms of Industry 4.0′;
- ‘The application of new concepts triggers a number of potential research agendas that may be developed in the coming years, in addition to those that are still in progress. One of these relatively novel research agendas connected to changes in condition monitoring results from the development of the concept of Industry 4.0. This research agenda can be expressed as a requirement for the automation of diagnostic procedures and methods of generating large amounts of data, which drives the need for more sophisticated methods of autonomous interpretation of vibration-reliant condition-monitoring data. In turn, a large amount of monitoring leads to the collaborative term of Industry 4.0 as big data. This is worth considering in accordance with the discussion of particular aspects of big data applied in condition monitoring in the past decade, such as volume, velocity, variety, veracity, and value. Furthermore, discontinuation of onboard data computing is still a challenge and seems to be a research agenda for the next several years, especially given that the quantity of data continuously increases as an exponential or power function in relation to, for example, the number of sensors used and their measurement directions. This may be supported by the application of various methods of artificial intelligence’;
- ‘In general, a separate research agenda is to consider the appropriate number of sensors used for a specific need and to determine where to locate these sensors’.
- Data observation and registration;
- Selection of function or approximation (which is also selection), taking into account certain conditions under consideration, i.e., establishing correlations between parameters under consideration;
- Clarification of actual process by taking into account the probability of occurrence of factors.
- Directly proportional slow increase in (i) values of the force from the rolling stock, (ii) wheel/rail contact area, (iii) contact span with increasing train velocity;
- Rapid curvilinear decrease in (i) the value of wheel–rail contact time and (ii) momentum with the increasing speed.
3.2. Discussion
4. Approach towards the Design of the ‘Closed’ Measurement System
5. Conclusions
- Development of a ‘closed’ measurement system that synchronizes predicted and registered results for process predictability.
- Establishment of ‘real-time’ concepts for natural processes and equipment registration, based on the speed of elastic waves or light and the ability to register wave superposition effects.
- Introduction of ‘conscious’ measurements that require modeling of parameter changes to predict patterns, considering various factors; for example, wheel position on railway tracks.
- Creation of a versatile approach for consistent process description across different conditions, such as track–rolling stock interaction at various speeds and loads with different track structure characteristics.
- Provide the basis for a unified system of track condition assessment and stress–strain prediction based on actual train traffic.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Castro, G.; Pires, J.; Motta, R.; Bernucci, L.; Fortunato, E.; Futai, M. Evaluating Environmental Effects On the Structural Behavior of the Railroad Track Subgrade Considering Different Sub-Ballast Design Solutions. Transp. Geotech. 2022, 34, 100761. [Google Scholar] [CrossRef]
- Indraratna, B.; Nguyen, T.T.; Singh, M.; Rujikiatkamjorn, C.; Carter, J.P.; Ni, J.; Truong, M.H. Cyclic loading response and associated yield criteria for soft railway subgrade—Theoretical and experimental perspectives. Comput. Geotech. 2021, 138, 104366. [Google Scholar] [CrossRef]
- Kampczyk, A.; Gamon, W.; Gawlak, K. Implementation of Non-Contact Temperature Distribution Monitoring Solutions for Railway Vehicles in a Sustainability Development System Transport. Sensors 2022, 22, 9624. [Google Scholar] [CrossRef]
- Xie, H.; Luo, Q.; Wang, T.; Jiang, L.; Connolly, D.P. Stochastic analysis of dynamic stress amplification factors for slab track foundations. Int. J. Rail Transp. 2023, 12, 281–303. [Google Scholar] [CrossRef]
- Gu, Q.; Pan, J.; Liu, Y.; Fu, M.; Zhang, J. An Effective Tangent Stiffness of Train–Track–Bridge Systems Based on Artificial Neural Network. Appl. Sci. 2022, 12, 2735. [Google Scholar] [CrossRef]
- Bondarenko, I.; Keršys, A.; Neduzha, L. Assessment of the Railway Track Deformability Behaviour as the Parameter of Operational Availability Function. In Proceedings of the 25th International Conference Transport Means, Kaunas, Lithuania, 6–8 October 2021; pp. 644–648. [Google Scholar]
- Mazilu, T.; Dumitriu, M.; Răcănel, I.-R. Parametric Study of the Influence of Nonlinear Elastic Characteristics of Rail Pads on Wheel–Rail Vibrations. Materials 2023, 16, 1531. [Google Scholar] [CrossRef]
- Fischer, S.; Liegner, N.; Bocz, P.; Vinkó, Á.; Terdik, G. Investigation of Track Gauge and Alignment Parameters of Ballasted Railway Tracks Based on Real Measurements Using Signal Processing Techniques. Infrastructures 2023, 8, 26. [Google Scholar] [CrossRef]
- Pircher, P. A DEM Model for Elastic Sleepers to Study Dynamic Railway Track Behavior. Master’s Thesis, Montanuniversitaet Leoben, Leoben, Austria, 2021. [Google Scholar] [CrossRef]
- Li, D.; Kaewunruen, S.; You, R. Remaining Fatigue Life Predictions of Railway Prestressed Concrete Sleepers Considering Time-Dependent Surface Abrasion. Sustainability 2022, 14, 11237. [Google Scholar] [CrossRef]
- Kisilowski, J.; Kowalik, R. Method for Determining the Susceptibility of the Track. Appl. Sci. 2022, 12, 12534. [Google Scholar] [CrossRef]
- Sala, A.J.; Felez, J.; Cano-Moreno, J.D. Efficient Railway Turnout Design: Leveraging TRIZ-Based Approaches. Appl. Sci. 2023, 13, 9531. [Google Scholar] [CrossRef]
- Gonzalo, A.P.; Horridge, R.; Steele, H.; Stewart, E.; Entezami, M. Review of Data Analytics for Condition Monitoring of Railway Track Geometry. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22737–22754. [Google Scholar] [CrossRef]
- Guerrieri, M. Railway Track Deterioration and Monitoring. In Fundamentals of Railway Design; Springer Nature: Cham, Switzerland, 2023. [Google Scholar] [CrossRef]
- Kraśkiewicz, C.; Mossakowski, P.; Zbiciak, A.; Sabouni-Zawadzka, A.A. Experimental identification of dynamic characteristics of a track structure influencing the level of noise emission. Arch. Civ. Eng. 2021, 67, 543–557. [Google Scholar] [CrossRef]
- Hodas, S.; Izvoltova, J.; Chromcak, J.; Bacova, D. Monitoring the Geometric Position of Transition Zones to Increase the Quality and Safety of Railway Lines. Appl. Sci. 2022, 12, 6038. [Google Scholar] [CrossRef]
- La Paglia, I.; Di, G.E.; Facchinetti, A.; Carnevale, M.; Corradi, R. Acceleration-based condition monitoring of track longitudinal level using multiple regression models. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2023. [Google Scholar] [CrossRef]
- Fernández-Bobadilla, H.A.; Martin, U. Modern Tendencies in Vehicle-Based Condition Monitoring of the Railway Track. IEEE Trans. Instrum. Meas. 2023, 72, 3507344. [Google Scholar] [CrossRef]
- Kulkarni, R. Onboard Condition Monitoring of Vehicle-Track Dynamic Interaction Using Machine Learning: Enabling the Railway Industry’s Digital Transformation. Ph.D. Thesis, Engineering Mechanics. KTH, School of Engineering Sciences (SCI), Centres, The KTH Railway Group, Stockholm, Sweden, 2023. [Google Scholar]
- Ghiasi, R.; Malekjafarian, A. A Data-Driven Approach for Monitoring Railway Tracks Using Dynamic Responses Collected by an In-service Train. In Experimental Vibration Analysis for Civil Engineering Structures; EVACES 2023; Lecture Notes in Civil Engineering; Limongelli, M.P., Giordano, P.F., Quqa, S., Gentile, C., Cigada, A., Eds.; Springer: Cham, Switzerland, 2023; Volume 433. [Google Scholar] [CrossRef]
- Roth, M.; Baasch, B.; Havrila, P.; Groos, J. Map-Supported Positioning En–ables In-Service Condition Monitoring of Railway Tracks. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 2346–2353. [Google Scholar] [CrossRef]
- Wang, Q.A.; Dai, Y.; Ma, Z.-G.; Wang, J.-F.; Lin, J.-F.; Ni, Y.-Q.; Ren, W.-X.; Jiang, J.; Yang, X.; Yan, J.-R. Towards high-precision data modeling of SHM measurements using an improved sparse Bayesian learning scheme with strong generalization ability. Struct. Health Monit. 2024, 23, 588–604. [Google Scholar] [CrossRef]
- Farooq, M.A.; Meena, N.K.; Punetha, P.; Nimbalkar, S.; Lam, N. Experimental and Computational Analyses of Sustainable Approaches in Railways. Infrastructures 2024, 9, 53. [Google Scholar] [CrossRef]
- Flenga, M.G.; Favvata, M.J. A New Method for Defining the Optimal Separation Gap Distance and the Acceptable Structural Pounding Risk on Multistory RC Structures. Appl. Sci. 2024, 14, 1165. [Google Scholar] [CrossRef]
- Wang, J.-F.; Lin, J.-F.; Xie, Y.-L. Damage Identification of Turnout Rail through a Covariance-Based Condition Index and Quantitative Pattern Analysis. Infrastructures 2023, 8, 176. [Google Scholar] [CrossRef]
- Weston, P.; Roberts, C.; Yeo, G.; Stewart, E. Perspectives on railway track geometry condition monitoring from in-service railway vehicles. Veh. Syst. Dyn. 2015, 53, 1063–1091. [Google Scholar] [CrossRef]
- Boronenko, Y.P.; Tret’yakov, A.V.; Rakhimov, R.V.; Zimakova, M.V.; Nekrasova, A.V.; Tret’yakov, O.A. Monitoring the technical condition of the railway track using the method of continuous recording of dynamic processes occurring due to the interaction between rolling stock and railway track. Bull. Sci. Res. Results 2021, 3, 66–82. [Google Scholar] [CrossRef]
- Tsunashima, H. Condition Monitoring of Railway Tracks from Car-Body Vibration Using a Machine Learning Technique. Appl. Sci. 2019, 9, 2734. [Google Scholar] [CrossRef]
- Chen, J.; Díaz, M.; Rubio, B.; Troya, J.M. Raise: Railway Infrastructure Health Monitoring Using Wireless Sensor Networks. In Sensor Systems and Software. S-CUBE 2013. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Zuniga, M., Dini, G., Eds.; Springer: Cham, Switzerland, 2013; Volume 122, pp. 143–157. [Google Scholar] [CrossRef]
- Tsunashima, H.; Hirose, R. Condition monitoring of railway track from car-body vibration using time–frequency analysis. Veh. Syst. Dyn. 2022, 60, 1170–1187. [Google Scholar] [CrossRef]
- Wei, B.; Wang, W.-H.; Wang, P.; Yang, T.-H.; Jiang, L.-Z.; Wang, T. Seismic Responses of a High-speed Railway (HSR) Bridge and Track Simulation under Longitudinal Earthquakes. J. Earthq. Eng. 2022, 26, 4449–4470. [Google Scholar] [CrossRef]
- Bragança, C.; Souza, E.F.; Ribeiro, D.; Meixedo, A.; Bittencourt, T.N.; Carvalho, H. Drive-by Methodologies Applied to Railway Infrastructure Subsystems: A Literature Review—Part II: Track and Vehicle. Appl. Sci. 2023, 13, 6982. [Google Scholar] [CrossRef]
- Zeng, Y.; Shen, C.; Núñez, A.; Dollevoet, R.; Zhang, W.; Li, Z. An Interpretable Method for Operational Modal Analysis in Time-Frequency Representation and Its Applications to Railway Sleepers. Struct. Control Health Monit. 2023, 2023, 6420772. [Google Scholar] [CrossRef]
- Zhuang, L.; Qi, H.; Wang, T.; Zhang, Z. A Deep-Learning-Powered Near-Real-Time Detection of Railway Track Major Components: A Two-Stage Computer-Vision-Based Method. IEEE Internet Things J. 2022, 9, 18806–18816. [Google Scholar] [CrossRef]
- De Rosa, A.; Kulkarni, R.; Qazizadeh, A.; Berg, M.; Di Gialleonardo, E.; Facchinetti, A.; Bruni, S. Monitoring of lateral and cross level track geometry irregularities through onboard vehicle dynamics measurements using machine learning classification algorithms. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2021, 235, 107–120. [Google Scholar] [CrossRef]
- Firlik, B.; Tabaszewski, M. Monitoring of the technical condition of tracks based on machine learning. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 702–708. [Google Scholar] [CrossRef]
- Goodall, R.; Dixon, R.; Hamadache, M.; Ward, C. Railways Discovering Mechatronics and Monitoring—An Overview. IFAC-Pap. Line 2020, 53, 8488–8493. [Google Scholar] [CrossRef]
- Karakose, M.; Yaman, O.; Murat, K.; Akin, E. A new approach for condition monitoring and detection of rail components and rail track in railway. Int. J. Comput. Intell. Syst. 2018, 11, 830–845. [Google Scholar] [CrossRef]
- Bondarenko, I.; Lukoševičius, L.; Keršys, R.; Neduzha, L. Innovative Trends in Railway Condition Monitoring. Transp. Res. Procedia 2024, 77, 10–17. [Google Scholar] [CrossRef]
- Gonzalo, A.P.; Entezami, M.; Weston, P.; Roberts, C.; Marquez, F.P.G. Railway Track and Vehicle Onboard Monitoring: A Review. E3S Web Conf. 2023, 409, 02014. [Google Scholar] [CrossRef]
- Bondarenko, I.; Keršys, R.; Neduzha, L. Analysis of Problem Related to Experimental Data Processing in the Study of the Rolling Stock Influence on the Track. In Proceedings of the 26th International Conference Transport Means, Kaunas, Lithuania, 5–7 October 2022; pp. 663–668. [Google Scholar]
- Bondarenko, I.; Severino, A.; Olayode, I.O.; Campisi, T.; Neduzha, L. Dynamic Sustainable Processes Simulation to Study Transport Object Efficiency. Infrastructures 2022, 7, 124. [Google Scholar] [CrossRef]
- Bondarenko, I.; Campisi, T.; Tesoriere, G.; Neduzha, L. Using Detailing Concept to Assess Railway Functional Safety. Sustainability 2023, 15, 18. [Google Scholar] [CrossRef]
- Bondarenko, I.; Lukoševičius, V.; Keršys, R.; Neduzha, L. Investigation of Dynamic Processes of Rolling Stock–Track Interaction: Experimental Realization. Sustainability 2023, 15, 5356. [Google Scholar] [CrossRef]
- Kostrzewski, M.; Melnik, R. Condition Monitoring of Rail Transport Systems: A Bibliometric Performance Analysis and Systematic Literature Review. Sensors 2021, 21, 4710. [Google Scholar] [CrossRef] [PubMed]
- Ward, C.P.; Weston, P.; Stewart, E.J.C.; Li, H.; Goodall, R.; Roberts, C.; Mei, T.X.; Charles, G.; Dixon, R. Condition monitoring opportunities using vehicle-based sensors. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2011, 225, 202–218. [Google Scholar] [CrossRef]
- Ngamkhanong, C.; Kaewunruen, S.; Afonso Costa, B.J. State-of-the-art review of railway track resilience monitoring. Infrastructures 2018, 3, 3. [Google Scholar] [CrossRef]
- Chia, L.; Bhardwaj, B.; Lu, P.; Bridgelall, R. Railroad Track Condition Monitoring Using Inertial Sensors and Digital Signal Processing: A Review. IEEE Sens. J. 2019, 19, 25–33. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Sarrabezolles, C.-A.; Khan, M.A.; Golpayegani, F. A Machine-Learning-Based Approach for Railway Track Monitoring Using Acceleration Measured on an In-Service Train. Sensors 2023, 23, 7568. [Google Scholar] [CrossRef] [PubMed]
- Cantero, D.; O’Brien, E.J.; González, A. Modelling the vehicle in vehicle—Infrastructure dynamic interaction studies. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2010, 224, 243–248. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Obrien, E.I.; Quirke, P.; Cantero, D.; Golpayegani, F. Railway Track Loss-of-Stiffness Detection Using Bogie Filtered Displacement Data Measured on a Passing Train. Infrastructures 2021, 6, 93. [Google Scholar] [CrossRef]
- Nguyen, K.; Goicolea, J.; Galbadón, F. Comparison of dynamic effects of high-speed traffic load on ballasted track using a simplified two-dimensional and full three-dimensional model. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2014, 228, 128–142. [Google Scholar] [CrossRef]
- Zhai, W.; Wang, K.; Lin, J. Modelling and experiment of railway ballast vibrations. J. Sound Vib. 2004, 270, 673–683. [Google Scholar] [CrossRef]
- Kwon, Y.W.; Bang, H. The Finite Element Method Using MATLAB; CRC Press: Boca Raton, FL, USA, 2000; 624p. [Google Scholar] [CrossRef]
- González, A. Vehicle-bridge dynamic interaction using finite element modelling. In Finite Element Analysis; Moratal, D., Ed.; InTechOpen: Rijeka, Croatia, 2010; pp. 637–662. [Google Scholar] [CrossRef]
- Milosevic, M.D.G.; Pålsson, B.A.; Nissen, A.; Nielsen, J.C.O.; Johansson, H. Condition Monitoring of Railway Crossing Geometry via Measured and Simulated Track Responses. Sensors 2022, 22, 1012. [Google Scholar] [CrossRef] [PubMed]
- La Placa, A.; Freddi, F.; Giuliani, F. Monitoring of Insulated Rail Joints Based on Gap Value Measurement. Urban Rail Transit 2024, 10, 28–41. [Google Scholar] [CrossRef]
- Circelli, M.; Kaviani, N.; Licciardello, R.; Ricci, S.; Rizzetto, L.; Arabani, S.S.; Shi, D. Track geometry monitoring by an on-board computer-vision-based sensor system. Transp. Res. Procedia 2023, 69, 257–264. [Google Scholar] [CrossRef]
- Zanelli, F.; La Paglia, I.; Debattisti, N.; Mauri, M.; Tarsitano, D.; Sabbioni, E. Monitoring Railway Infrastructure Through a Freight Wagon Equipped with Smart Sensors. In Experimental Vibration Analysis for Civil Engineering Structures; EVACES 2023; Lecture Notes in Civil Engineering; Limongelli, M.P., Giordano, P.F., Quqa, S., Gentile, C., Cigada, A., Eds.; Springer: Cham, Switzerland, 2023; Volume 432. [Google Scholar] [CrossRef]
- Liu, G.; Wang, Q.-A.; Jiao, G.; Dang, P.; Nie, G.; Liu, Z.; Sun, J. Review of Wireless RFID Strain Sensing Technology in Structural Health Monitoring. Sensors 2023, 23, 6925. [Google Scholar] [CrossRef]
- Nesser, H.; Hassan, A.; Mahmoud, H.A.; Lubineau, G. High-Sensitivity RFID Sensor for Structural Health Monitoring. Adv. Sci. 2023, 10, 2301807. [Google Scholar] [CrossRef]
- Zou, X.; Wen, L.; Hu, B. A Bulk Acoustic Wave Strain Sensor for Near-Field Passive Wireless Sensing. Sensors 2023, 23, 3904. [Google Scholar] [CrossRef]
- Balcı, E.; Bezgin, N.Ö. Can One Exclude Track and Rolling Stock Stiffness for the Assessment of Dynamic Impact Forces Due to Variations in Track Profile. In Advances in Transportation Geotechnics IV; Tutumluer, E., Nazarian, S., Al-Qadi, I., Qamhia, I.I., Eds.; Lecture Notes in Civil Engineering; Springer: Cham, Switzerland, 2022; Volume 165. [Google Scholar] [CrossRef]
- Musayev, J.; Zhauyt, A.; Ismagulova, S.; Yussupova, S. Theory and Practice of Determining the Dynamic Performance of Traction Rolling Stock. Appl. Sci. 2023, 13, 12455. [Google Scholar] [CrossRef]
- La Placa, A.; Freddi, F.; Giuliani, F. Bonded insulated rail joint monitoring using gap opening variation with fibre optic sensors: Analytical validation and limits. Transp. Res. Procedia 2024, 74, 1007–1014. [Google Scholar] [CrossRef]
- Wu, P.; Zhang, F.; Wang, J.; Wei, L.; Huo, W. Review of wheel-rail forces measuring technology for railway vehicles. Adv. Mech. Eng. 2023, 15. [Google Scholar] [CrossRef]
- Yang, C.; Kaynardag, K.; Salamone, S. Investigation of wave propagation and attenuation in periodic supported rails using wave finite element method. Acta Mech. 2024, 235, 1453–1469. [Google Scholar] [CrossRef]
- Zhang, P.; Li, S.; Núñez, A.; Li, Z. Vibration modes and wave propagation of the rail under fastening constraint. Mech. Syst. Signal Process. 2021, 160, 107933. [Google Scholar] [CrossRef]
- Iqbal, M.; Kumar, A. Analysis of bending waves and parametric influence on band gaps in periodic track structure. Mater. Today Proc. 2023. [Google Scholar] [CrossRef]
- Bondarenko, I.; Keršys, R.; Neduzha, L. Modeling the Dynamism of Complex Dynamic Systems Using the Universal Laws of the Wave Theory. In Proceedings of the 27th International Conference Transport Means, Palanga, Lithuania, 4–6 October 2023; pp. 639–644. [Google Scholar]
- Boccaccio, M.; Fierro, G.P.M.; Bucciarelli, F.; Meo, M. Multi-tonal subwavelength metamaterial for absorption and amplification of acoustic and ultrasonic waves. Eng. Res. Express 2021, 3, 025024. [Google Scholar] [CrossRef]
- Tran, L.-H.; Hoang, T.; Foret, G.; Duhamel, D. Calculation of the dynamic responses of a railway track on a non-uniform foundation. J. Vib. Control 2023, 29, 3544–3553. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Data | ||
|---|---|---|
| Proposed Modeling Concept | Current Modeling Concept | |
| Train | Track | |
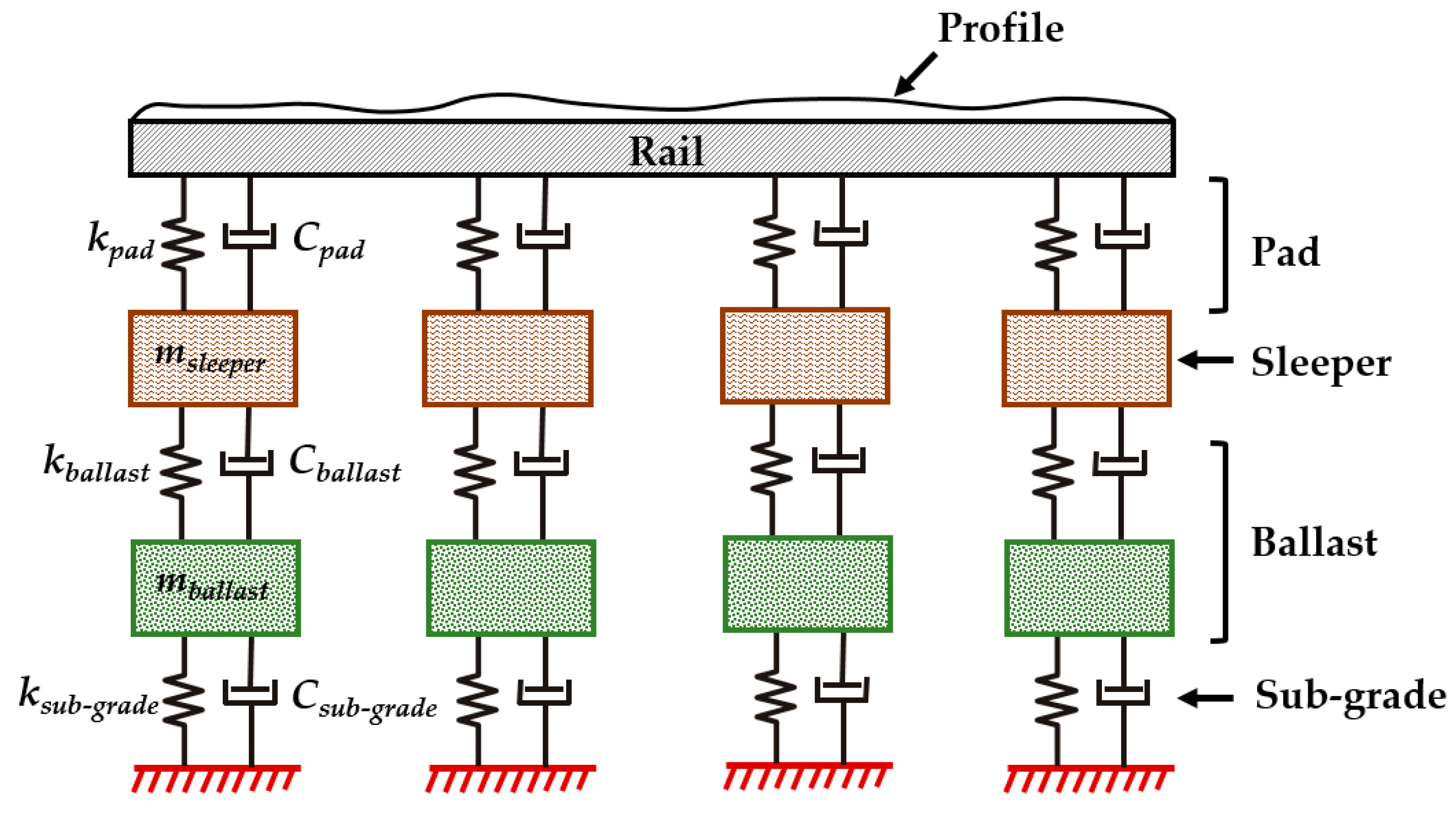
| Young’s modulus of materials | Wheelset mass | Elastic modulus of rail |
| Poisson’s ratio of materials | Bogie mass | Rail cross-sectional area |
| Density of materials | Car body mass | Rail second moment of area |
| Geometric characteristics of element | Moment of inertia of bogie | Rail mass per unit length |
| Characteristics of primary impulse | Moment of inertia of main body | Rail pad stiffness |
| Primary suspension stiffness | Rail pad damping | |
| Secondary suspension stiffness | Sleeper mass (half) | |
| Primary suspension damping | Sleeper spacing | |
| Secondary suspension damping | Ballast stiffness | |
| Distance between car body center of mass and bogie pivot | Ballast damping | |
| Distance between axles | Ballast mass | |
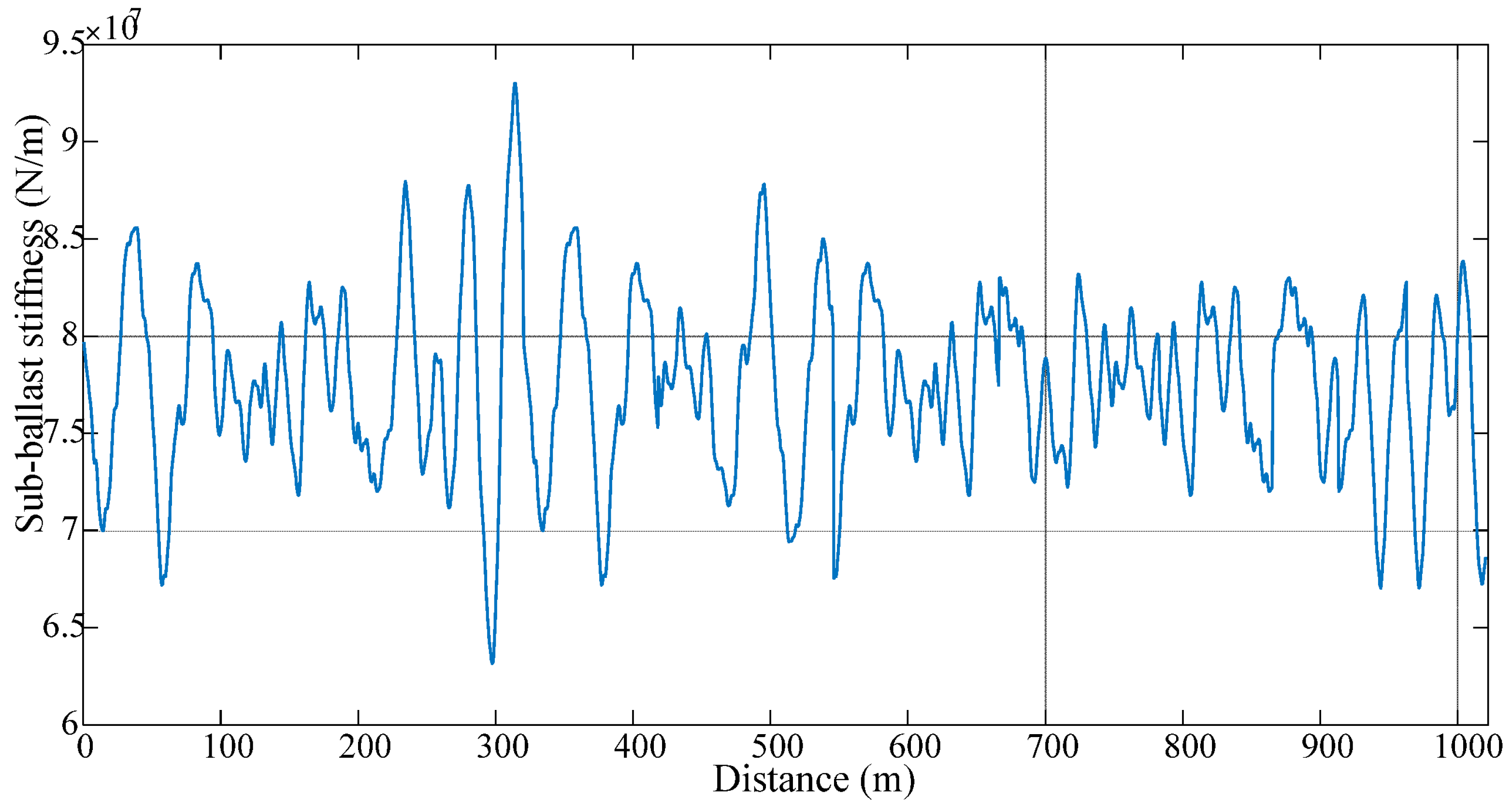
| Subgrade stiffness mean | ||
| Subgrade damping | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bondarenko, I.; Lukoševičius, V.; Neduzha, L. Novel ‘Closed’-System Approach for Monitoring the Technical Condition of Railway Tracks. Sustainability 2024, 16, 3180. https://doi.org/10.3390/su16083180
Bondarenko I, Lukoševičius V, Neduzha L. Novel ‘Closed’-System Approach for Monitoring the Technical Condition of Railway Tracks. Sustainability. 2024; 16(8):3180. https://doi.org/10.3390/su16083180
Chicago/Turabian StyleBondarenko, Iryna, Vaidas Lukoševičius, and Larysa Neduzha. 2024. "Novel ‘Closed’-System Approach for Monitoring the Technical Condition of Railway Tracks" Sustainability 16, no. 8: 3180. https://doi.org/10.3390/su16083180
APA StyleBondarenko, I., Lukoševičius, V., & Neduzha, L. (2024). Novel ‘Closed’-System Approach for Monitoring the Technical Condition of Railway Tracks. Sustainability, 16(8), 3180. https://doi.org/10.3390/su16083180