1. Introduction
With the aggravation of the energy crisis and increasingly prominent environmental problems, renewable energy has become the most effective solution [
1]. Among the various methods of renewable energy generation, wind power generation, seen as the most technologically sophisticated and economically beneficial [
2], has been developing rapidly [
3,
4]. However, there are great differences in structure and control between wind turbine and conventional units [
5]. Thus, great attention [
6,
7] has been paid to large-scale wind power integration. Specifically, the impact of large-scale wind power integration on power system small signal stability is a high research priority.
To date, many scholars have researched this subject. Shi
et al. [
8] adopted the Monte Carlo simulation technique to figure out the relationship between small signal stability and the wind generation intermittence. Bu
et al. [
9] studied the impact of stochastic uncertainty of grid-connected wind generation on probabilistic small signal stability of the power system based on the Gram–Charlier expansion and the probabilistic density function of critical eigenvalues. Soleimanpour and Mohammadi [
10] presented a new method based on two-point estimation for probabilistic eigenvalues analysis in power systems containing wind energy, obtaining information on probabilistic system stability with less computation. Slootweg
et al. [
11] took a system with two generators and a two-area test system with four generators as their example and studied the impact of wind power integration on power system small signal stability by observing the movement of the eigenvalues, investigated by gradually replacing the power generated by the synchronous generators with wind power. It was concluded from the results that due to the reduction of the number of synchronous generators participating in the oscillation, wind power integration will improve the damping of the power system in which constant speed wind turbines have better effects than variable speed turbines. Anaya-Lara
et al. [
12] tested a three-generator system and came to similar conclusions. However, not all researchers agreed. Mendonca and Peas Lopes [
13] tested a three-area system with six generators to study the influence of wind power integration, using the eigenvalue method and multi-scenario technology. Their results indicated that when the change of wind power output counteracts that of the conventional units in the same area, the damping of oscillation mode does not change significantly. Knuppel
et al. [
14] analyzed the impact of full-load converter interfaced wind turbines on small signal stability of power system with wind energy integration based on the eigenvalue method and sensitivity method. Their results also indicate that wind energy does not participate in the power system oscillation mode and the characteristics of the system oscillation mode are virtually unchanged by wind energy penetration. Meanwhile, some other studies indicated that wind power integration will reduce the power system small signal stability in certain circumstances. Gautam
et al. [
15] replaced the DFIG (Doubly Fed Induction Machine) machines with conventional generators and then studied the impact of wind power penetration on the power system small signal stability by evaluating the sensitivity of its eigenvalues. Their results showed that wind power exerts a positive influence on part modes but adversely affected the other modes. Hagstrom
et al. [
16] proposed that integration of wind power generated by DFIG and DDSG (Direct Drive Synchronous Generator) will reduce the damping of oscillation mode by time-domain simulation analysis of Nordic grid. Sanchez-Gasea
et al. [
17] pointed out that wind power integration had different effects on small signal stability under different operation modes. Compared with the synchronous machines, large-scale wind power integration enhances the damping of oscillation mode. However, when the scale of wind power is small, the damping of oscillation mode is reduced. Meanwhile, wind power taking the place of the synchronous machines will lead to the disappearance of part oscillation modes.
Generally speaking, the above studies are divided into two kinds of approaches. One is based on probability, which considers the uncertainty of wind energy and determines the probability distribution of a power system’s critical eigenvalues to find the impact of wind power’s stochastic uncertainty factors on power system small signal stability. Another approach is a deterministic method, which applies to a certain grid and typical working conditions; conclusions are reached by comparing changes in oscillation mode one by one with the eigenvalue method or time-domain simulation. These study results are often in conflict, making people unable to agree on which is right. The reason is that most of these research methods are based on a certain grid and typical working conditions, reflecting only part conditions of power system small signal stability but lacking a more macro perspective.
However, the small signal stability region boundary [
18,
19,
20] describes the critical operating range of small signal stability of the system as a whole, making overall evaluation of the system state possible from a more macro perspective. Thus it is more suitable for analysis on the impact of large-scale wind power integration on small signal stability. At present, the small signal stability region boundary theory is mainly adopted in the field of conventional power systems and has no application in the study of the impact of wind power on small signal stability yet.
Based on this, the theory of the small signal stability region boundary was studied first. By using the model of wind farm integration to the single-machine infinite bus power system, this paper studies the impact of wind power integration scale and the coupling strength with synchronous generator on small signal stability through comparison of the stability region boundaries, searching for a new way of thinking about and analyzing the impact of wind power integration on small signal stability.
5. Discussion with Respect to Existing Research Results
Based on the conclusions above, this paper attempts to discuss the results of some of the published literature through comparison. As noted above, the results of previous studies are often in conflict. The reason is that most of these studies are based on a certain grid and typical working conditions, which study the impact of different integration scales of wind power on small signal stability by replacing the conventional units with wind turbines.
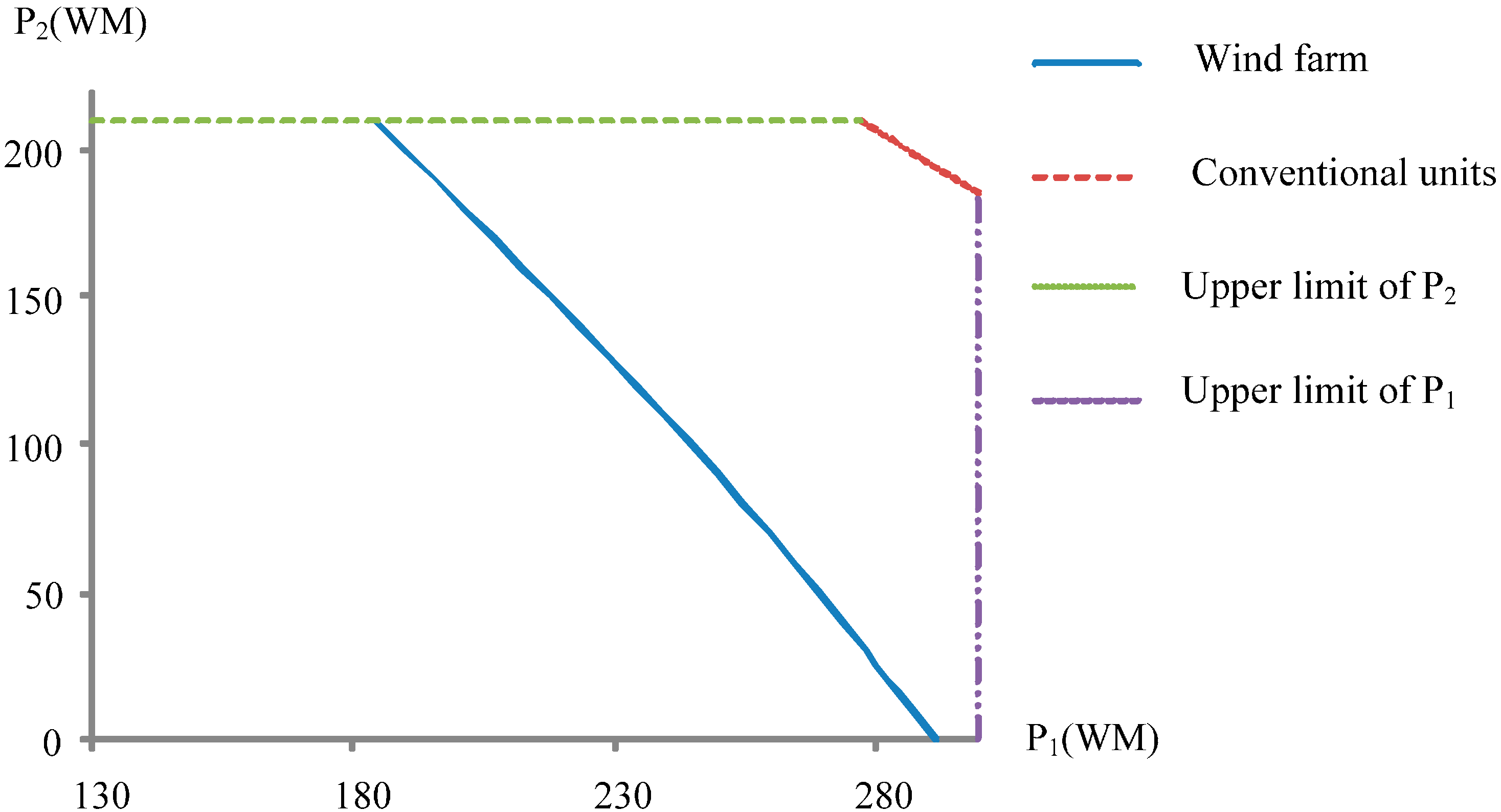
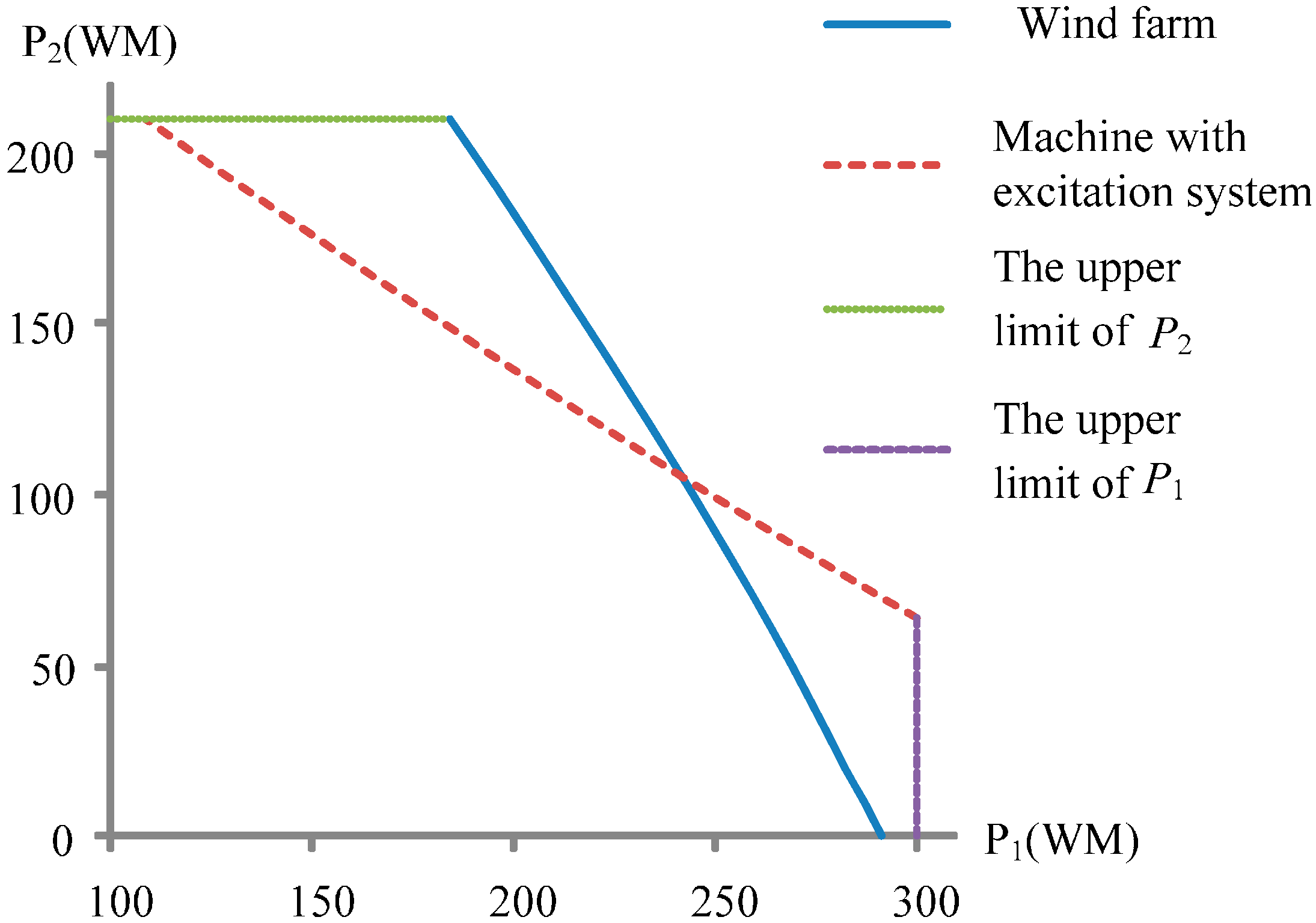
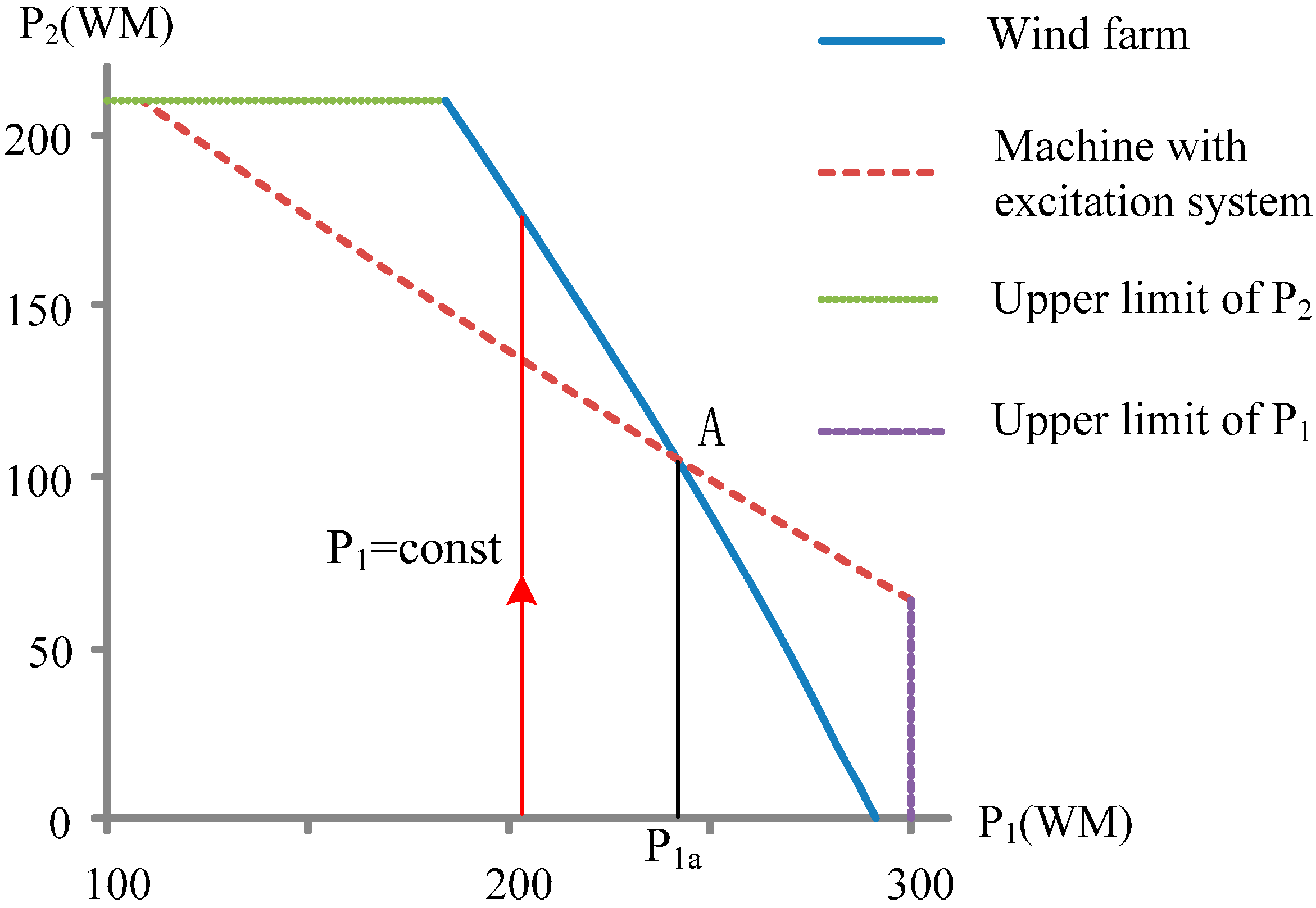
The published papers often use wind turbines as substitutes for the synchronous machine with excitation system to study the power system small signal stability with wind power integration, only changing the power output of the wind turbine and its substitute conventional units,
i.e., keeping
P1 fixed and only changing
P2 in
Figure 9. We labeled the intersection point of the small signal stability boundary lines as point A, whose
P1 is
P1a. We then redrew it to create
Figure 14.
Figure 14.
The research contrast between this article and the published papers.
Figure 14.
The research contrast between this article and the published papers.
Different working conditions correspond to different sizes of
P1, which means the line
P1 = const is at different positions on the horizontal axis. Based on previous analyses, we got that when
P1 <
P1a, wind power integration would improve power system small signal stability, which corresponds to the conclusions of reference [
11,
12]; and that when
P1 >
P1a, wind power would reduce power system small signal stability, which corresponds to the conclusions of reference [
15,
16,
17]. When the size of
P1 and
P1a is close, the impact of wind power on small signal stability would be very small, which corresponds to the conclusions of reference [
13,
14].
Therefore, although the conclusions of the current literature seem to be contradictory, they in fact only reflect a part of the grid. Analysis based on small signal stability boundary offered a good interpretation from a qualitative point of view.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










