
Multi-Objective Scheduling of Electric Vehicles in Smart Distribution Network


Abstract
:1. Introduction
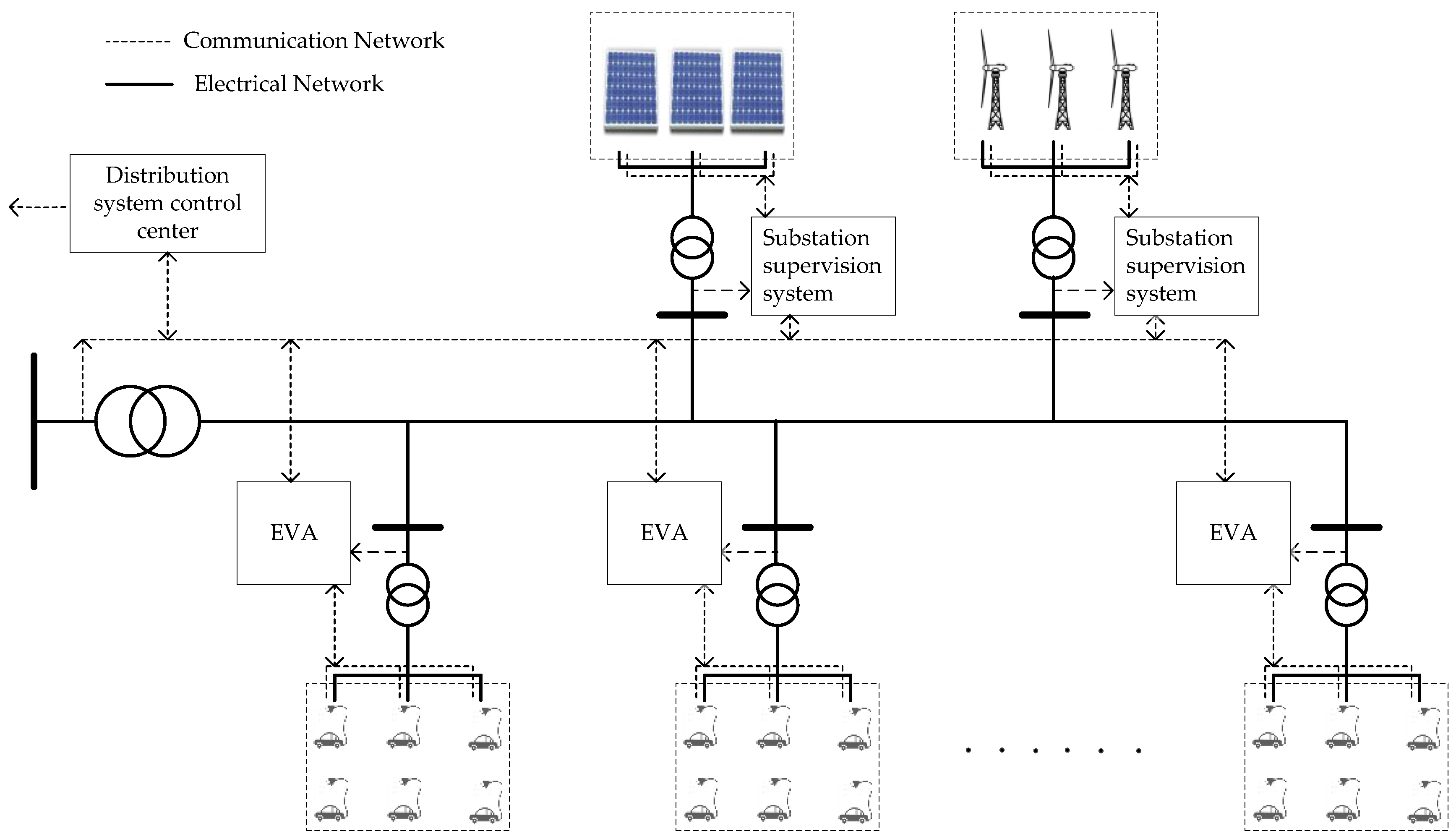
2. Hierarchical Dispatching Architecture via EVAs in Smart Distribution Network
3. Electric Vehicles Model
4. Coordinated Dispatching Model
4.1. Upper Level Model
4.2. Lower Level Model
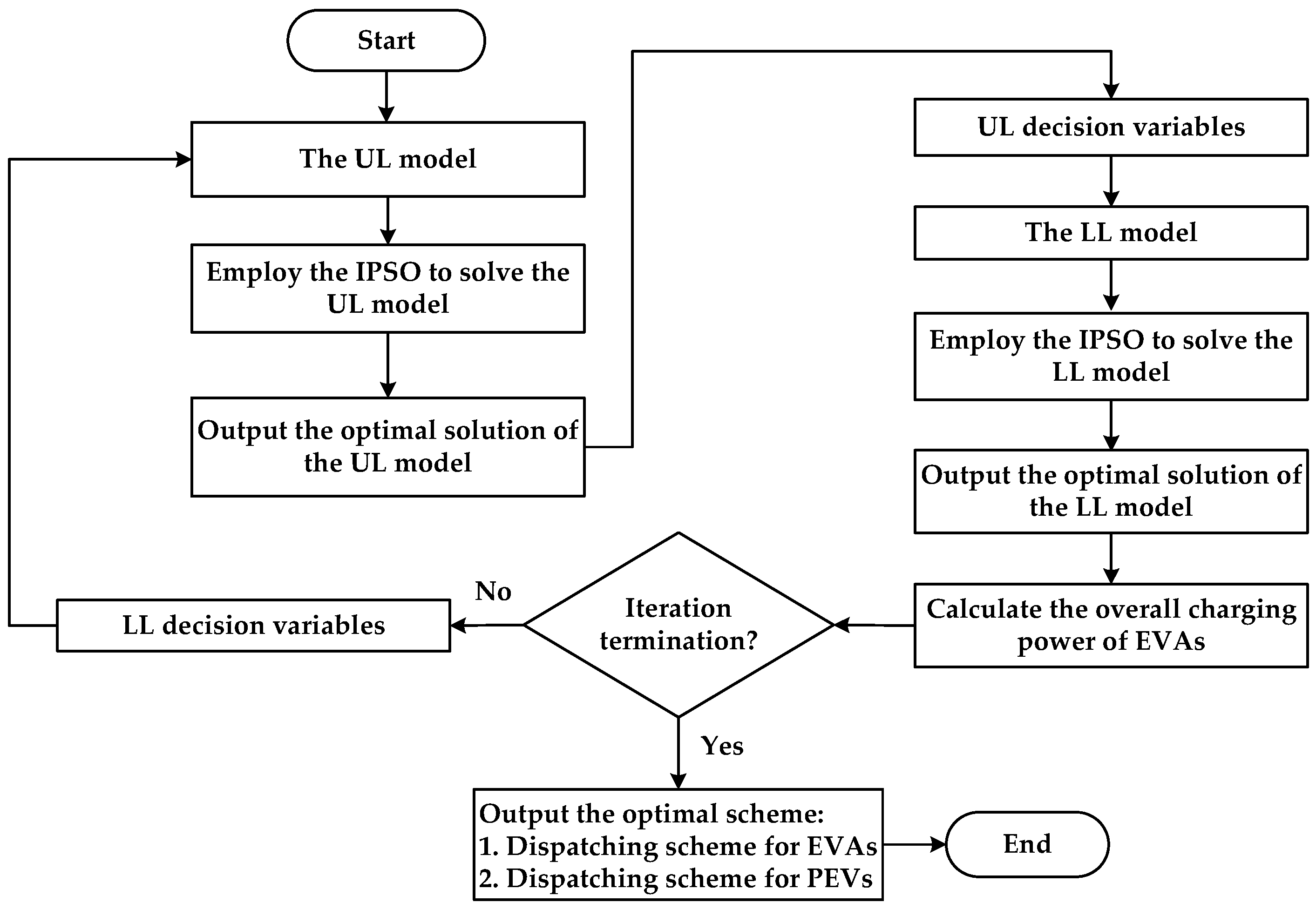
5. Approach to Solving the Model
6. Case Studies
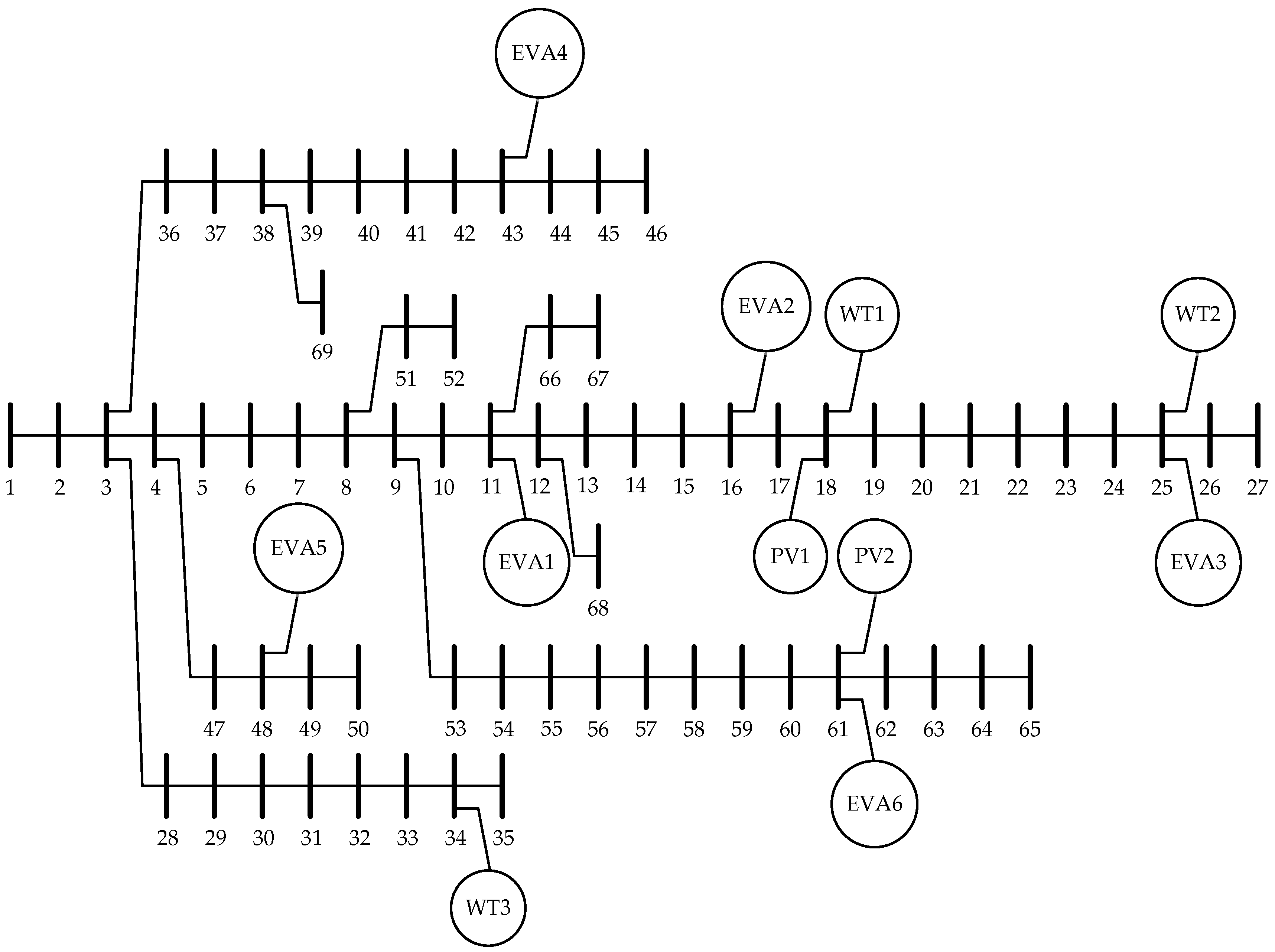
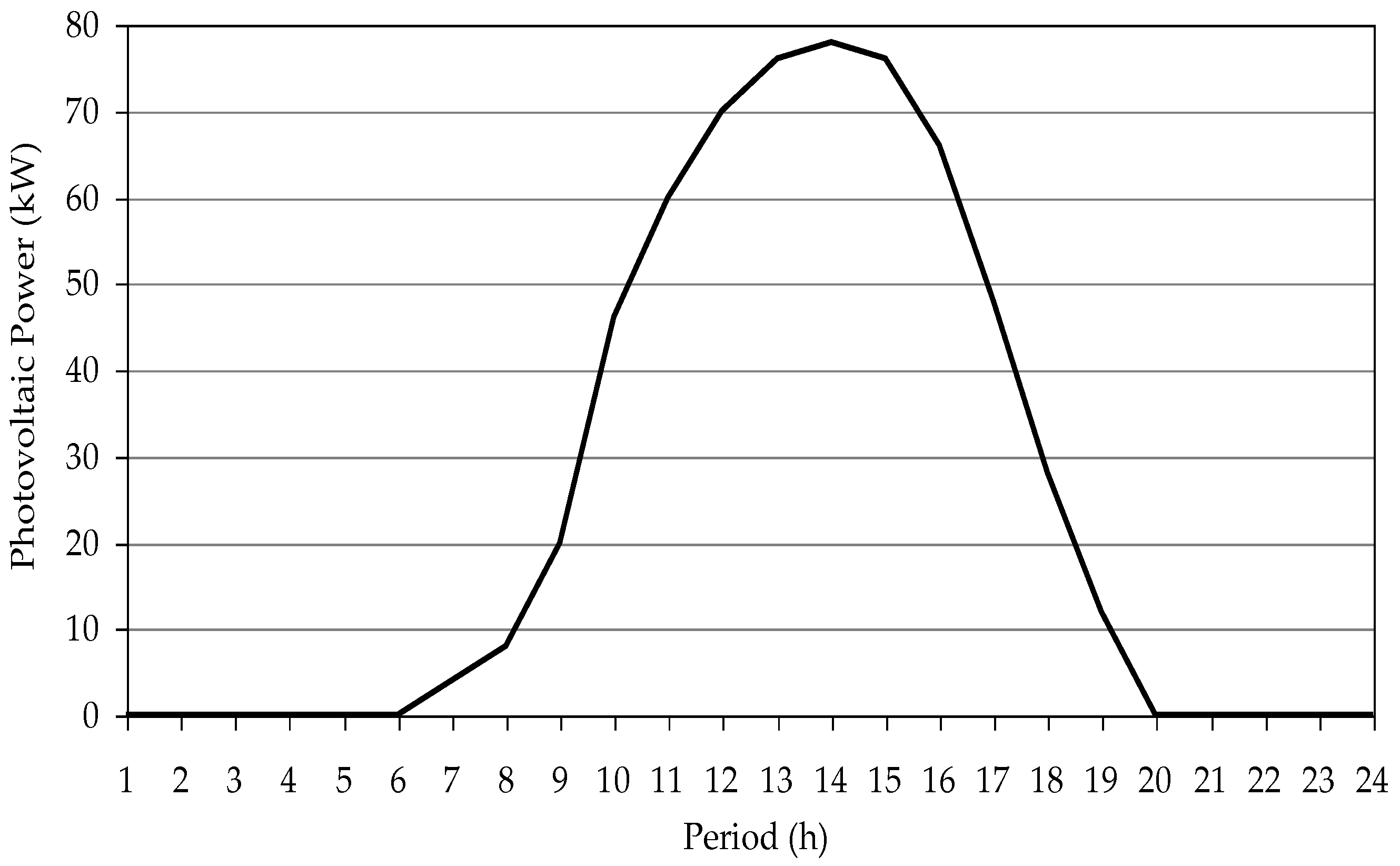
6.1. Case Description
6.2. Optimization Results
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Green, R.C.; Wang, L.; Alam, M. The impact of plug-in hybrid electric vehicles on distribution network: A review and outlook. Renew. Sustain. Energy Rev. 2011, 15, 544–553. [Google Scholar] [CrossRef]
- Longo, M.; Yaïci, W.; Zaninelli, D. “Team play” between renewable energy sources and vehicle fleet to decrease air pollution. Sustainability 2016, 8, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Díaz, A.; Ramos-Real, F.; Marrero, G.; Perez, Y. Impact of electric vehicles as distributed energy storage in isolated systems: The case of tenerife. Sustainability 2015, 7, 15152–15178. [Google Scholar] [CrossRef]
- Fernández, L.P.; Román, T.G.S.; Cossent, R.; Domingo, C.M.; Frías, P. Assessment of the impact of plug-in electric vehicles on distribution networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Zhang, X.; Xie, J.; Rao, R.; Liang, Y. Policy incentives for the adoption of electric vehicles across countries. Sustainability 2014, 6, 8056–8078. [Google Scholar] [CrossRef]
- Deilami, S.; Masoum, A.S.; Moses, P.S.; Masoum, M.A.S. Real-time coordination of plug-in electric vehicle charging in smart grids to minimize power losses and improve voltage profile. IEEE Trans. Smart Grid. 2011, 2, 456–467. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Soares, F.J.; Almeida, P.M.R. Integration of electric vehicles in the electric power system. Proc. IEEE 2011, 99, 168–183. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Letendre, S.; Watts, R.A. Effects of plug-in hybrid electric vehicles on the Vermont electric transmission system. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 11–15 January 2009.
- Lund, H.; Kempton, W. Integration of renewable energy into the transport and electricity sectors through V2G. Energy Policy 2008, 36, 3578–3587. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal scheduling of vehicle-to-grid energy and ancillary services. IEEE Trans. Smart Grid 2012, 3, 351–359. [Google Scholar] [CrossRef]
- Guille, C.; Gross, G. A conceptual framework for the vehicle-to-grid (V2G) implementation. Energy Policy 2009, 37, 4379–4390. [Google Scholar] [CrossRef]
- Kempton, W.; Tomić, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279. [Google Scholar] [CrossRef]
- Ota, Y.; Taniguchi, H.; Nakajima, T.; Liyanage, K.M.; Baba, J.; Yokoyama, A. Autonomous distributed V2G (vehicle-to-grid) satisfying scheduled charging. IEEE Trans. Smart Grid 2012, 3, 559–564. [Google Scholar] [CrossRef]
- Liu, W.; Niu, S.; Xu, H.; Li, X. A new method to plan the capacity and location of battery swapping station for electric vehicle considering demand side management. Sustainability 2016, 8, 1–17. [Google Scholar] [CrossRef]
- Carrión, M.; Zárate-Miñano, R. Operation of renewable-dominated power systems with a significant penetration of plug-in electric vehicles. Energy 2015, 90, 827–835. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Multi-objective scheduling of electric vehicles in smart distribution system. Energy Convers. Manag. 2014, 79, 43–53. [Google Scholar] [CrossRef]
- Bayram, I.S.; Michailidis, G.; Devetsikiotis, M. Electric power allocation in a network of fast charging stations. IEEE J. Sel. Areas Commun. 2013, 31, 1235–1246. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Abbasi, A.; Rostami, M.A.; Khosravi, A. Optimal distribution feeder reconfiguration for increasing the penetration of plug-in electric vehicles and minimizing network costs. Energy 2015, 93, 1693–1703. [Google Scholar] [CrossRef]
- Papadopoulos, P.; Skarvelis-Kazakos, S.; Grau, I.; Cipcigan, L.M. Electric vehicles’ impact on British distribution networks. IET Electr. Syst. Transp. 2012, 2, 91–102. [Google Scholar] [CrossRef]
- Richardson, P.; Flynn, D.; Keane, A. Optimal charging of electric vehicles in low-voltage distribution systems. IEEE Trans. Power Syst. 2012, 27, 268–279. [Google Scholar] [CrossRef]
- Bayram, I.S.; Tajer, A.; Abdallah, M. Capacity planning frameworks for electric vehicle charging stations with multiclass customers. IEEE Trans. Smart Grid 2015, 6, 1934–1943. [Google Scholar] [CrossRef]
- Hilshey, A.D.; Hines, P.D.; Rezaei, P.; Dowds, J.R. Estimating the impact of electric vehicle smart charging on distribution transformer aging. IEEE Trans. Smart Grid 2013, 4, 905–913. [Google Scholar] [CrossRef]
- Shao, S.; Pipattanasomporn, M.; Rahman, S. Grid integration of electric vehicles and demand response with customer choice. IEEE Trans. Smart Grid 2012, 3, 543–550. [Google Scholar] [CrossRef]
- Su, W.; Chow, M.Y. Performance evaluation of an eda-based large-scale plug-in hybrid electric vehicle charging algorithm. IEEE Trans. Smart Grid 2012, 3, 308–315. [Google Scholar] [CrossRef]
- Bae, S.; Kwasinski, A. Spatial and temporal model of electric vehicle charging demand. IEEE Trans. Smart Grid 2012, 3, 394–403. [Google Scholar] [CrossRef]
- Olivella-Rosell, P.; Villafafila-Robles, R.; Sumper, A.; Bergas-Jane, J. Probabilistic agent-based model of electric vehicle charging demand to analyse the impact on distribution networks. Energy 2015, 8, 4160–4187. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 67–78. [Google Scholar] [CrossRef]
- Ortega-Vazquez, M.A.; Bouffard, F.; Silva, V. Electric vehicle aggregator/system operator coordination for charging scheduling and services procurement. IEEE Trans. Power Syst. 2013, 28, 1806–1815. [Google Scholar] [CrossRef]
- Vagropoulos, S.I.; Kyriazidis, D.K.; Bakirtzis, A.G. Real-time charging management framework for electric vehicle aggregators in a market environment. IEEE Trans. Smart Grid 2015, 7, 948–957. [Google Scholar] [CrossRef]
- He, Y.; Venkatesh, B.; Guan, L. Optimal scheduling for charging and discharging of electric vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105. [Google Scholar] [CrossRef]
- Wu, D.; Aliprantis, D.C.; Ying, L. Load scheduling and dispatch for aggregators of plug-in electric vehicles. IEEE Trans. Smart Grid 2012, 3, 368–376. [Google Scholar] [CrossRef]
- Momber, I.; Wogrin, S.; Gomez, S.R.T. Retail pricing: A bilevel program for PEV aggregator decisions using indirect load control. IEEE Trans. Power Syst. 2016, 31, 464–473. [Google Scholar] [CrossRef]
- Yao, W.; Zhao, J.; Wen, F.; Xue, Y.; Ledwich, G. A hierarchical decomposition approach for coordinated dispatch of plug-in electric vehicles. IEEE Trans. Power Syst. 2013, 28, 2768–2778. [Google Scholar] [CrossRef]
- Santos, A.; Mcguckin, N.; Nakamoto, H.Y.; Gray, D.; Liss, S. Summary of Travel Trends: 2009 National Household Travel Survey; FHWA-PL-ll-022; US Department of Transportation Federal Highway Administration: Washington, DC, USA, 2011.
- Bracken, J.; McGill, J.T. Mathematical programs with optimization problems in the constraints. Oper. Res. 1973, 21, 37–44. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. IEEE Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar]
- Zhao, J.; Wen, F.; Dong, Z.Y.; Xue, Y.; Wong, K.P. Optimal dispatch of electric vehicles and wind power using enhanced particle swarm optimization. IEEE Trans. Ind. Inform. 2012, 8, 889–899. [Google Scholar] [CrossRef]
- Granville, S. Optimal reactive dispatch through interior point methods. IEEE Trans. Power Syst. 1994, 9, 136–146. [Google Scholar] [CrossRef]
- Chang, G.W.; Chu, S.Y.; Wang, H.L. An improved backward/forward sweep load flow algorithm for radial distribution systems. IEEE Trans. Power Syst. 2007, 22, 882–884. [Google Scholar] [CrossRef]
- Teng, J.H.; Chang, C.Y. Backward/forward sweep-based harmonic analysis method for distribution systems. IEEE Trans. Power Deliv. 2007, 22, 1665–1672. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| % | 1.5 | 1.4 | 3.85 | 0.9 | 1.5 | 1.2 | 0.8 | 0.6 | 1.7 | 1.3 | 2.9 | 1.4 | 1.7 | 1.6 | 1.8 | 1.3 | 1 |
| Bus | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 |
| % | 2.5 | 0.9 | 0.4 | 2.1 | 1.7 | 1.4 | 1.2 | 1.5 | 1.1 | 0.9 | 1.4 | 1.2 | 0.9 | 0.7 | 0.05 | 1.5 | 1.6 |
| Bus | 36 | 37 | 38 | 39 | 40 | 41 | 42 | 43 | 44 | 45 | 46 | 47 | 48 | 49 | 50 | 51 | 52 |
| % | 2.2 | 0.9 | 1.8 | 1.1 | 1.4 | 2.1 | 1.3 | 1.5 | 1.3 | 1.6 | 1.7 | 1.2 | 1.3 | 0.5 | 1.6 | 1.4 | 1.2 |
| Bus | 53 | 54 | 55 | 56 | 57 | 58 | 59 | 60 | 61 | 62 | 63 | 64 | 65 | 66 | 67 | 68 | 69 |
| % | 1.4 | 1.6 | 1.8 | 0.8 | 3.4 | 1.3 | 1.1 | 0.8 | 2.4 | 3.7 | 1.3 | 1.2 | 1.5 | 2.1 | 1.4 | 1.3 | 1.3 |
| Hour | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| λ($/kWh) | 0.033 | 0.027 | 0.020 | 0.017 | 0.017 | 0.029 | 0.033 | 0.054 |
| Hour | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| λ($/kWh) | 0.215 | 0.572 | 0.572 | 0.572 | 0.215 | 0.572 | 0.286 | 0.279 |
| Hour | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| λ($/kWh) | 0.086 | 0.059 | 0.050 | 0.061 | 0.181 | 0.077 | 0.043 | 0.037 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, C.; Liang, N.; Tan, J.; Wang, G. Multi-Objective Scheduling of Electric Vehicles in Smart Distribution Network. Sustainability 2016, 8, 1234. https://doi.org/10.3390/su8121234
Deng C, Liang N, Tan J, Wang G. Multi-Objective Scheduling of Electric Vehicles in Smart Distribution Network. Sustainability. 2016; 8(12):1234. https://doi.org/10.3390/su8121234
Chicago/Turabian StyleDeng, Changhong, Ning Liang, Jin Tan, and Gongchen Wang. 2016. "Multi-Objective Scheduling of Electric Vehicles in Smart Distribution Network" Sustainability 8, no. 12: 1234. https://doi.org/10.3390/su8121234
APA StyleDeng, C., Liang, N., Tan, J., & Wang, G. (2016). Multi-Objective Scheduling of Electric Vehicles in Smart Distribution Network. Sustainability, 8(12), 1234. https://doi.org/10.3390/su8121234