Integrating Cellular Automata with the Deep Belief Network for Simulating Urban Growth


Abstract
:1. Introduction
2. Methods
2.1. CA for Urban Growth Model
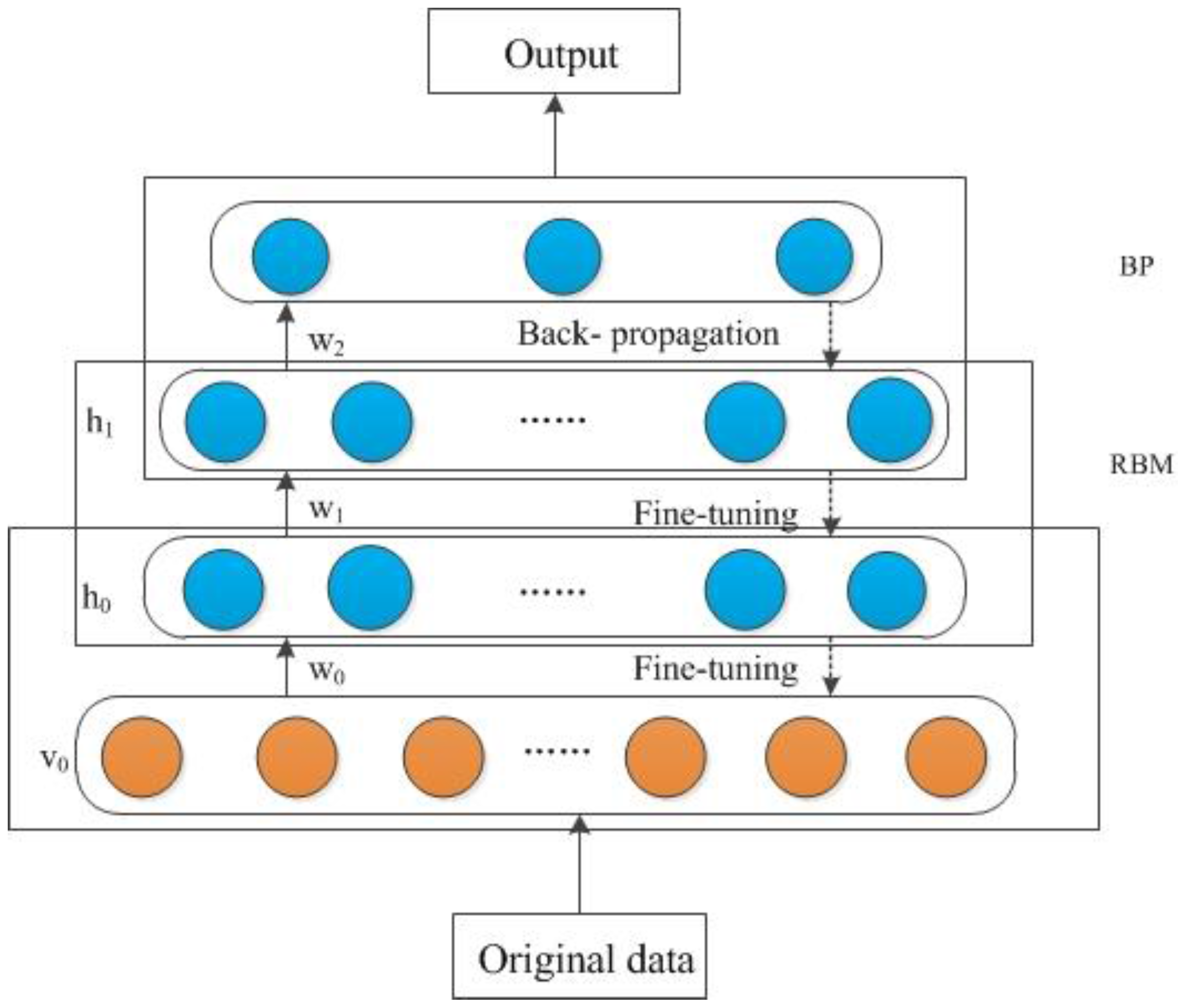
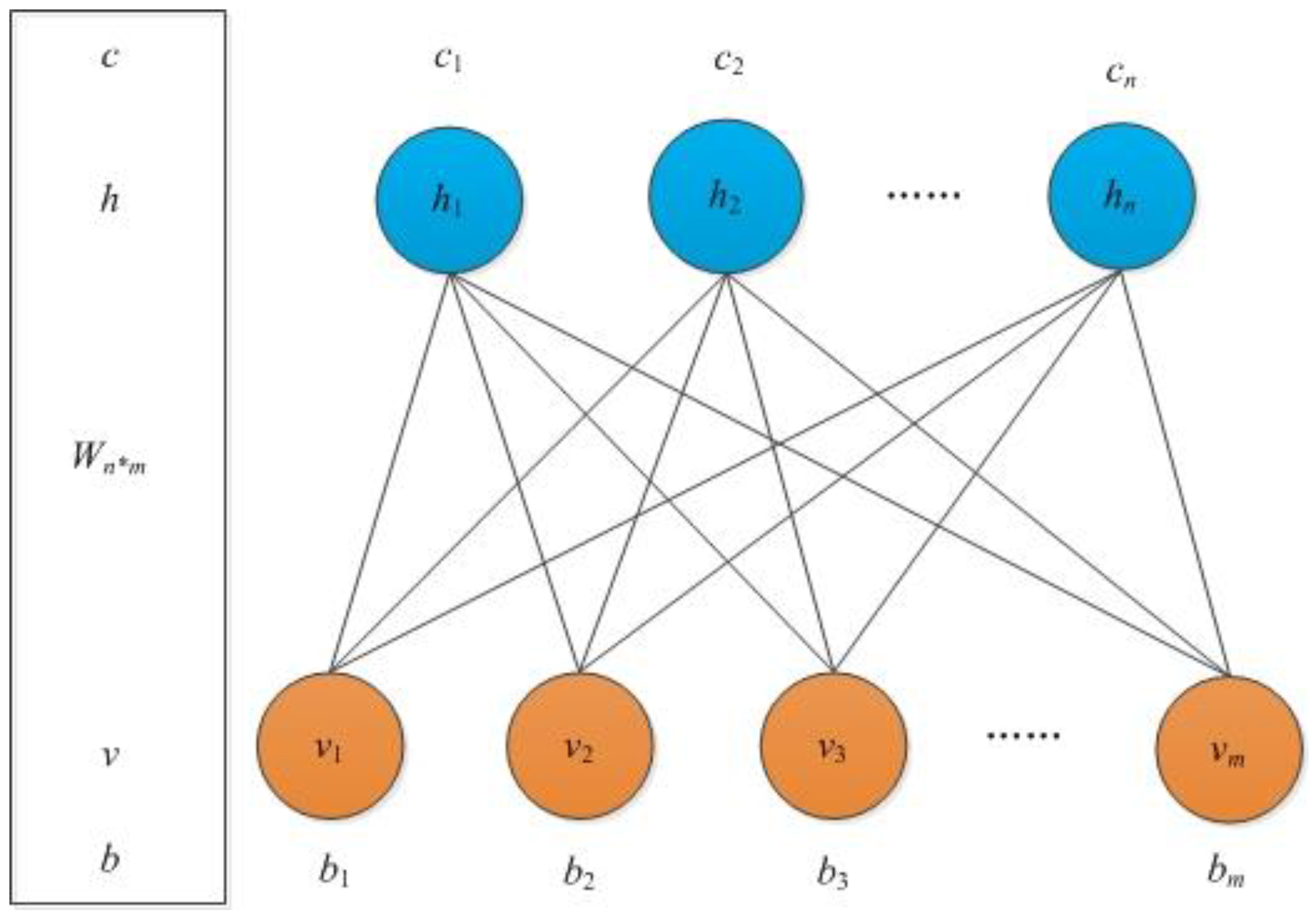
2.2. Deep Belief Network
2.3. Bat Algorithm for DBN
| Algorithm 1: Integrate bat algorithm with DBN. |
| Initialize: N: the population size of bats |
| G: the number of generations |
| v: velocities of bats |
| Lb, Ub: upper and lower limits of a v |
| x: the position including nHids, , sparsity, dropout and of bats. The initial x is expressed as: |
| where d is the dimension of x. |
| A, Amax, Amin: loudness, the maximal and minimal loudness |
| Q, Qmax, Qmin: frequency, the maximal and minimal frequency |
| r: pulse rate |
| Fitness: the prediction error on training data of all bats |
| for t = 1:G |
| for i = 1:N |
| ; |
| ; |
| ; |
| if rand > ri |
| ; |
| end |
| Evaluate new solutions by objective function and get the Fitnew |
| if (Fitnew ≤ Fitness(i)) and rand < |
| Replace the previous solution by the solution; |
| Replace the Fitness(i) by the Fitnew; |
| ; |
| ); |
| end |
| Update the current best solution; |
| end |
| end |
2.4. Integrating BA-DBN Model into CA
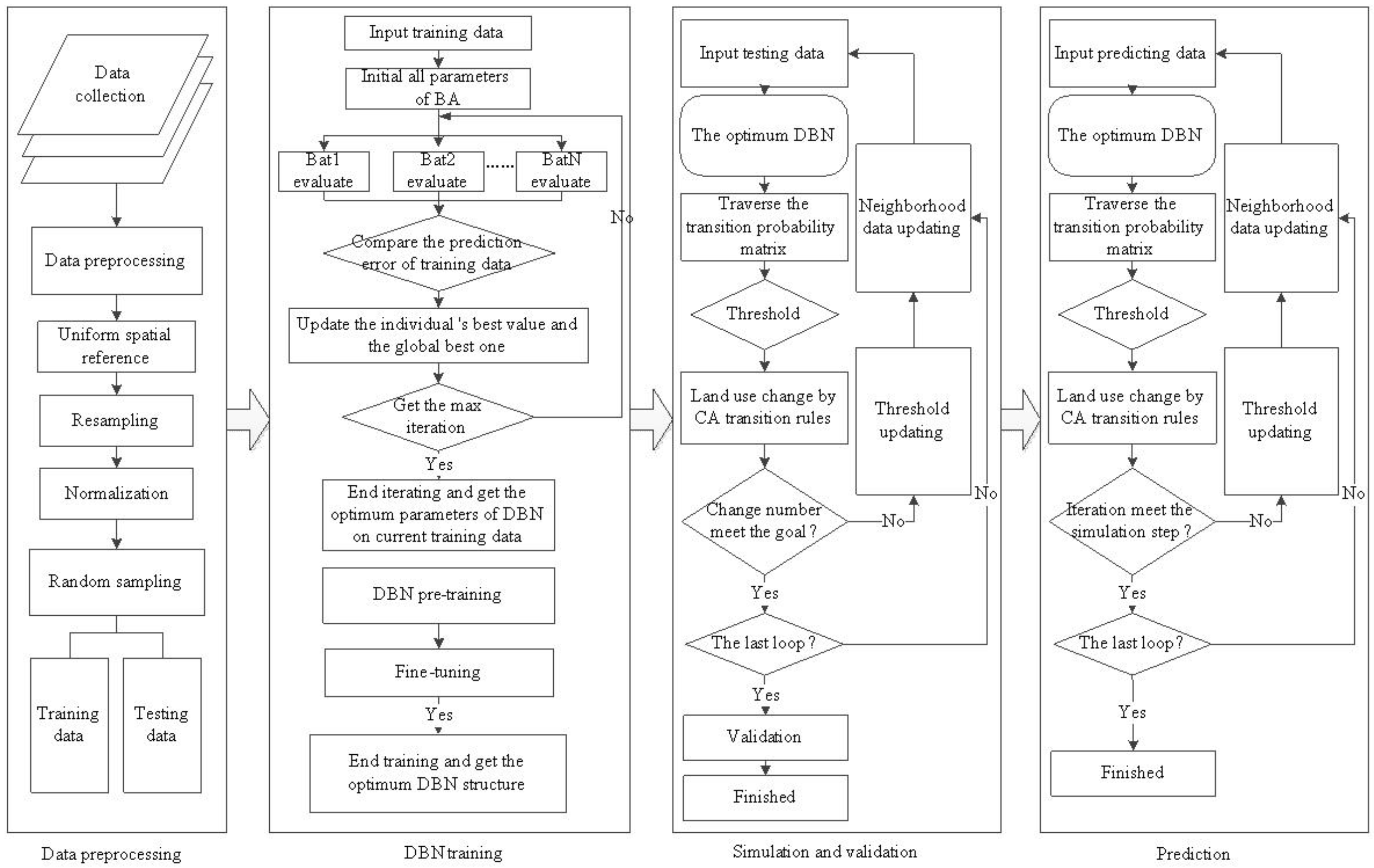
- Step 1:
- Data processing: Collect all useful spatial data combined with GIS and remote sensing. Then, make the spatial references, resampling and normalization for all data uniform. Obtain the training and testing data using the stratified sampling method.
- Step 2:
- DBN training: Get the optimal parameters using BA on the current training data and the best DBN structure using pre-training and BP fine-tuning.
- Step 3:
- Simulation and validation: Simulate the urban expansion using the optimum DBN structure obtained in Step 2. The result is compared with the observed data to determine the simulation accuracy.
- Step 4:
- Prediction: Predict the trend of urban expansion using the DBN structure obtained in Step 2 and the iteration obtained in Step 3.
3. Case Study
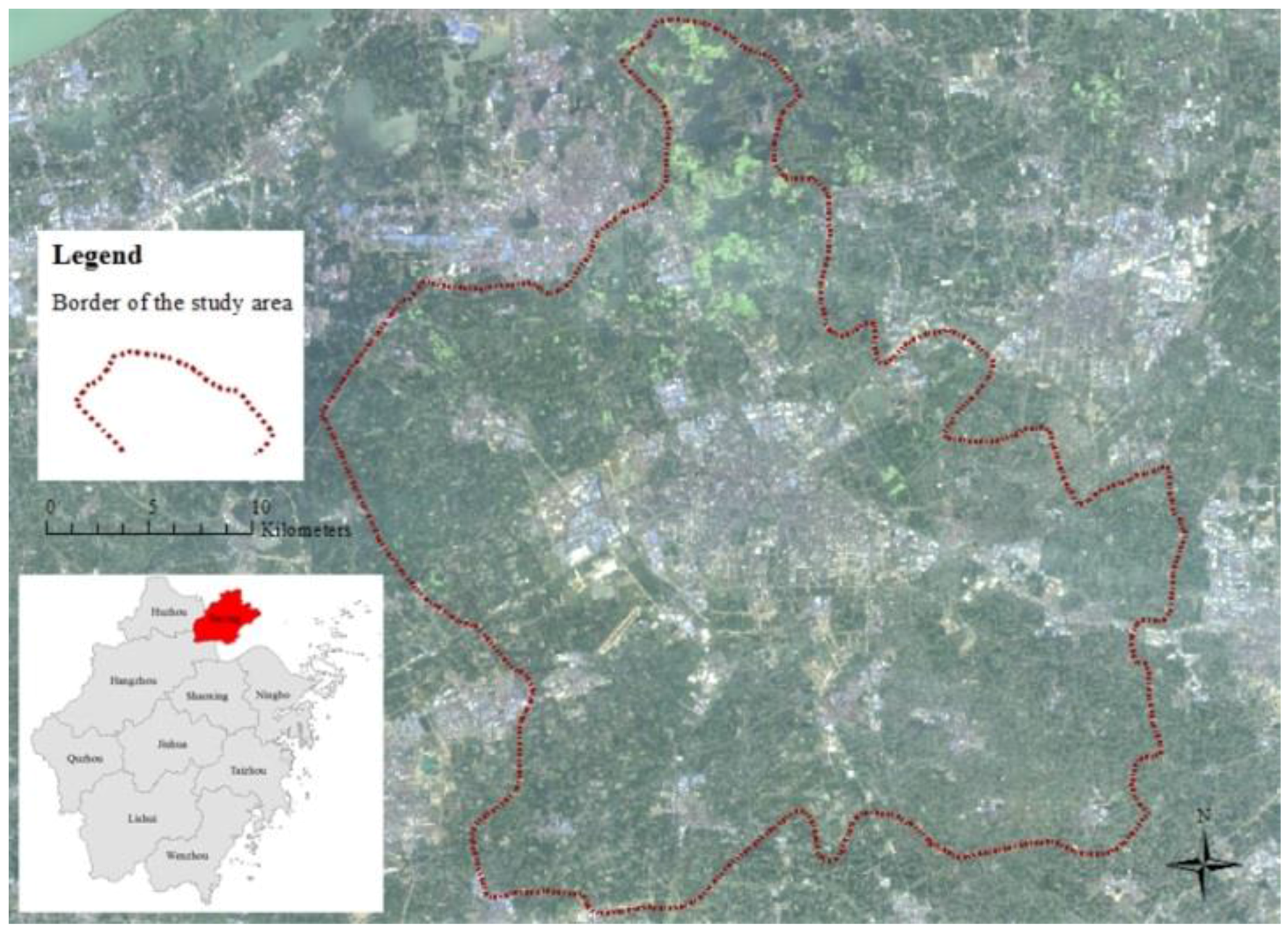
3.1. Study Area
3.2. Data Collection
3.2.1. Land Use Data
3.2.2. Natural Environmental Conditions
3.2.3. Distance Variables
3.2.4. Neighborhood Variables
3.2.5. Zoning Suitability Data
- (1)
- Category 1 comprised the built-up areas from land planning data and that are not high quality prime farmland;
- (2)
- Category 2 comprised the built-up areas in land planning data and that are high quality prime farmland;
- (3)
- Category 3 comprised the non-built-up areas in land planning data, but that are high quality prime farmland;
- (4)
- Category 4 comprised the non-built-up areas in land planning data and that are not high quality prime farmland.
4. Implementation, Results and Discussion
4.1. Model Implementation
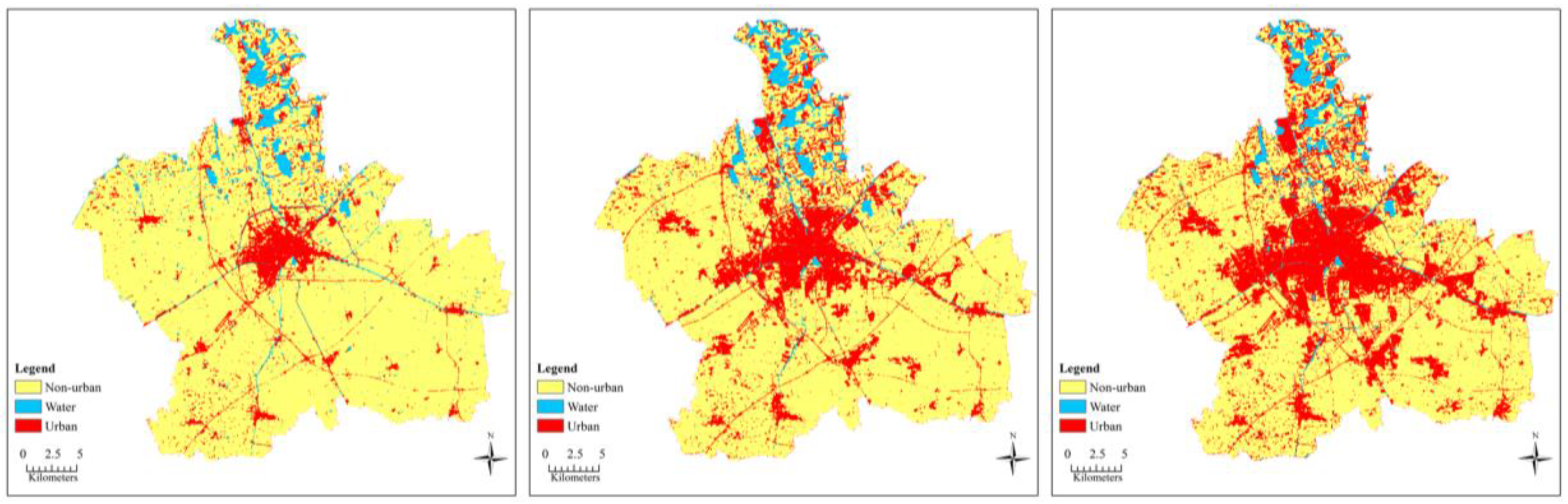
4.2. Analysis of the Observed Data
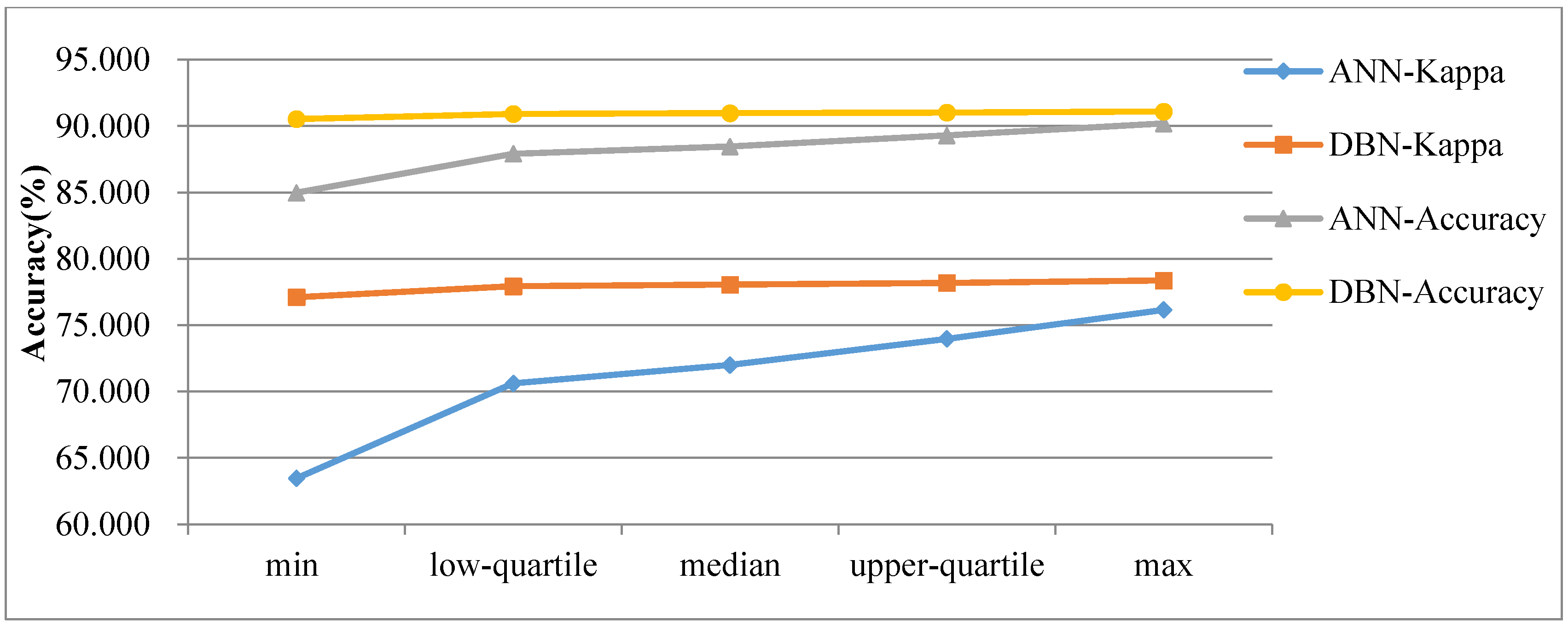
4.3. A Comparison of the Simulation Results between DBN-CA and ANN-CA
4.4. Prediction
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dale, V.H.; O'Neill, R.V.; Pedlowski, M.; Southworth, F. Causes and effects of land-use change in central Rondonia, Brazil. Photogramm. Eng. Remote Sens. 1993, 59, 997–1005. [Google Scholar]
- Pijanowski, B.C.; Brown, D.G.; Shellito, B.A.; Manik, G.A. Using neural networks and GIS to forecast land use changes: a Land Transformation Model. Comput. Environ. Urban Syst. 2002, 26, 553–575. [Google Scholar] [CrossRef]
- Xu, Y.; Mcnamara, P.; Wu, Y.; Dong, Y. An econometric analysis of changes in arable land utilization using multinomial logit model in Pinggu district, Beijing, China. J. Enviorn. Manag. 2013, 128, 324. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Wei, Y.H.D.; Huang, Z.J. Urban land expansion and spatial dynamics in globalizing Shanghai. Sustainability 2014, 6, 8856–8875. [Google Scholar] [CrossRef]
- Rasmussen, L.V.; Rasmussen, K.; Reenberg, A.; Proud, S. A system dynamics approach to land use changes in agro-pastoral systems on the desert margins of Sahel. Agric. Syst. 2012, 107, 56–64. [Google Scholar] [CrossRef]
- Clark, A.S. The political institutional determinants of land-use change and sprawl: a conceptual model. Theor. Empir. Res. Urban Manag. 2010, 5, 5–18. [Google Scholar]
- Muller, M.R.; Middleton, J. A Markov model of land-use change dynamics in the Niagara Region, Ontario, Canada. Landsc. Ecol. 1994, 9, 151–157. [Google Scholar]
- Li, X.; Li, X.; Peng, W.; Tong, C. Modelling urban sprawl with the optimal integration of Markov chain and spatial neighborhood analysis approach. Geosci. Remote Sens. Symp. 2004, 4, 2658–2661. [Google Scholar]
- Ralha, C.G.; Abreu, C.G.; Coelho, C.G.C.; Zaghetto, A.; Macchiavello, B.; Machado, R.B. A multi-agent model system for land-use change simulation. Environ. Modell. Softw. 2013, 42, 30–46. [Google Scholar] [CrossRef]
- Liu, D.; Zheng, X.; Zhang, C.; Wang, H. A new temporal–spatial dynamics method of simulating land-use change. Ecol. Model. 2017, 350, 1–10. [Google Scholar] [CrossRef]
- Losiri, C.; Nagai, M.; Ninsawat, S. Modeling Urban Expansion in Bangkok Metropolitan Region Using Demographic–Economic Data through Cellular Automata-Markov Chain and Multi-Layer Perceptron-Markov Chain Models. Sustainability 2016, 8, 686. [Google Scholar] [CrossRef]
- García, A.M.; Santé, I.; Boullón, M.; Crecente, R. Calibration of an urban cellular automaton model by using statistical techniques and a genetic algorithm. Application to a small urban settlement of NW Spain. Int. J. Geogr. Inf. Sci. 2013, 27, 1593–1611. [Google Scholar] [CrossRef]
- Ke, X.; Qi, L.; Zeng, C. A partitioned and asynchronous cellular automata model for urban growth simulation. Int. J. Geogr. Inf. Sci. 2016, 30, 1–23. [Google Scholar] [CrossRef]
- Tobler, W.R. A computer movie simulating urban growth in the Detroit region. Geogr. Econ. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- White, R.; Engelen, G. Cellular automata and fractal urban form: a cellular modelling approach to the evolution of urban land-use patterns. Environ. Plan. A 1993, 25, 1175–1199. [Google Scholar] [CrossRef]
- Clarke, K.C.; Hoppen, S.; Gaydos, L. A self-modifying cellular automaton model of historical urbanization in the San Francisco Bay area. Environ. Plan. B Plan. Des. 1997, 24, 247–261. [Google Scholar] [CrossRef]
- Clarke, K.C.; Gaydos, L.J. Loose-coupling a cellular automaton model and GIS: long-term urban growth prediction for San Francisco and Washington/Baltimore. Int. J. Geogr. Inf. Sci. 1998, 12, 699–714. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Yeh, G.O. Neural-network-based cellular automata for simulating multiple land use changes using GIS. Int. J. Geogr. Inf. Sci. 2002, 16, 323–343. [Google Scholar] [CrossRef]
- Almeida, C.M.; Gleriani, J.M.; Castejon, E.F.; Soares-Filho, B.S. Using neural networks and cellular automata for modeling intra-urban land-use dynamics. Int. J. Geogr. Inf. Sci. 2008, 22, 943–963. [Google Scholar] [CrossRef]
- Liao, J.; Tang, L.; Shao, G.; Qiu, Q.; Wang, C.; Zheng, S. A neighbor decay cellular automata approach for simulating urban expansion based on particle swarm intelligence. Int. J. Geogr. Inf. Sci. 2014, 28, 720–738. [Google Scholar] [CrossRef]
- Basse, R.M.; Omrani, H.; Charif, O.; Gerber, P.; Bódis, K. Land use changes modelling using advanced methods: Cellular automata and artificial neural networks. The spatial and explicit representation of land cover dynamics at the cross-border region scale. Appl. Geogr. 2014, 53, 160–171. [Google Scholar] [CrossRef]
- Cao, K.; Huang, B.; Li, M.; Li, W. Calibrating a cellular automata model for understanding rural-urban land conversion: a Pareto front-based multi-objective optimization approach. Int. J. Geogr. Inf. Sci. 2014, 28, 1028–1046. [Google Scholar] [CrossRef]
- Azari, M.; Tayyebi, A.; Helbich, M.; Reveshty, M.A. Integrating cellular automata, artificial neural network, and fuzzy set theory to simulate threatened orchards: application to Maragheh, Iran. Gisci. Remote Sens. 2016, 53, 183–205. [Google Scholar] [CrossRef]
- Wu, F. Calibration of stochastic cellular automata: the application to rural-urban land conversions. Int. J. Geogr. Inf. Sci. 2002, 16, 795–818. [Google Scholar] [CrossRef]
- Silva, E.A.; Clarke, K.C. Complexity, emergence and cellular urban models: lessons learned from applying SLEUTH to two Portuguese metropolitan areas. Eur. Plan. Stu. 2005, 13, 93–115. [Google Scholar] [CrossRef]
- Rienow, A.; Goetzke, R. Supporting SLEUTH—Enhancing a cellular automaton with support vector machines for urban growth modeling. Comput. Environ. Urban Syst. 2015, 49, 66–81. [Google Scholar] [CrossRef]
- Wu, F. SimLand: a prototype to simulate land conversion through the integrated GIS and CA with AHP-derived transition rules. Int. J. Geogr. Inf. Sci. 1998, 12, 63–82. [Google Scholar] [CrossRef]
- Wu, F.; Webster, C.J. Simulation of land development through the integration of cellular automata and multicriteria evaluation. Environ. Plan. B Plan. Des. 1998, 25, 103–126. [Google Scholar] [CrossRef]
- Poelmans, L.; Rompaey, A.V. Complexity and performance of urban expansion models. Comput. Environ. Urban Syst. 2010, 34, 17–27. [Google Scholar] [CrossRef]
- Munshi, T.; Zuidgeest, M.; Brussel, M.; Maarseveen, M.V. Logistic regression and cellular automata-based modelling of retail, commercial and residential development in the city of Ahmedabad, India. Cities 2014, 39, 68–86. [Google Scholar] [CrossRef]
- Cao, M.; Bennett, S.J.; Shen, Q.; Xu, R. A bat-inspired approach to define transition rules for a cellular automaton model used to simulate urban expansion. Int. J. Geogr. Inf. Sci. 2016, 30, 1–19. [Google Scholar] [CrossRef]
- Li, X.; Lin, J.; Chen, Y.; Liu, X.; Ai, B. Calibrating cellular automata based on landscape metrics by using genetic algorithms. Int. J. Geogr. Inf. Sci. 2013, 27, 594–613. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Liu, L.; He, J.; Ai, B. A bottom-up approach to discover transition rules of cellular automata using ant intelligence. Int. J. Geogr. Inf. Sci. 2008, 22, 1247–1269. [Google Scholar] [CrossRef]
- Tayyebi, A.; Pijanowski, B.C.; Tayyebi, A.H. An urban growth boundary model using neural networks, GIS and radial parameterization: An application to Tehran, Iran. Landsc. Urban Plan. 2011, 100, 35–44. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Dahl, G.E.; Yu, D.; Deng, L.; Acero, A. Context-dependent pre-trained deep neural networks for large-vocabulary speech recognition. Trance. Audio. Speech Lang. Process. 2011, 20, 30–42. [Google Scholar] [CrossRef]
- Yu, D.; Seltzer, M.L.; Li, J.; Huang, J.T.; Seide, F. Feature Learning in Deep Neural Networks—Studies on Speech Recognition Tasks. Available online: http://arxiv.org/pdf/1301.3605 (accessed on 2 October 2016).
- Shen, F.; Chao, J.; Zhao, J. Forecasting exchange rate using deep belief networks and conjugate gradient method. Neural Comput. 2015, 167, 243–253. [Google Scholar] [CrossRef]
- Hinton, G.E. Learning multiple layers of representation. Trends. Cogn. Sci. 2007, 11, 428–434. [Google Scholar] [CrossRef] [PubMed]
- Wei, Q.; Li, H.; Zhou, X. The Appropriate Hidden Layers of Deep Belief Networks for Speech Recognition; Intelligent Systems and Knowledge Engineering (ISKE): Taipei, Taiwan, 2015. [Google Scholar]
- Grekousis, G.; Manetos, P.; Photis, Y.N. Modeling urban evolution using neural networks, fuzzy logic and GIS: The case of the Athens metropolitan area. Cities 2013, 30, 193–203. [Google Scholar] [CrossRef]
- Mahboob, M.A.; Atif, I.; Iqbal, J. Remote sensing and GIS applications for assessment of urban sprawl in Karachi, Pakistan. Sci. Technol. Dev. 2015, 34, 179–188. [Google Scholar] [CrossRef]
- Alsharif, A.A.; Pradhan, B. Urban sprawl analysis of Tripoli Metropolitan City (Libya) using remote sensing data and multivariate logistic regression model. J. Indian Soc. Remote. 2014, 42, 149–163. [Google Scholar] [CrossRef]
- Triantakonstantis, D.; Stathakis, D. Urban growth prediction in Athens, Greece, using Artificial Neural Networks. Int. J. Civ. Environ. Struct. Constr. Archit. Eng. 2015, 9, 234–238. [Google Scholar]
- Kazemzadeh-zow, A.; Shahraki, S.Z.; Salvati, L.; Samani, N.N. A spatial zoning approach to calibrate and validate urban growth models. Int. J. Geogr. Inf. Sci. 2017, 31, 763–782. [Google Scholar] [CrossRef]
- Riccioli, F.; El Asmar, T.; El Asmar, J.-P.; Fagarazzi, C.; Casini, L. Artificial neural network for multifunctional areas. Environ. Monit. Assess. 2016, 188, 67. [Google Scholar] [CrossRef] [PubMed]
- Berberoğlu, S.; Akın, A.; Clarke, K.C. Cellular automata modeling approaches to forecast urban growth for adana, Turkey: A comparative approach. Landsc. Urban Plan. 2016, 153, 11–27. [Google Scholar]
- Riccioli, F.; El Asmar, T.; El Asmar, J.-P.; Fratini, R. Use of cellular automata in the study of variables involved in land use changes: an application in the wine production sector. Environ. Monit. Assess. 2013, 185, 5361–5374. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.S. A new metaheuristic bat-inspired algorithm. Comput. Knowl. Technol. 2010, 284, 65–74. [Google Scholar]
- Von Neumann, J. Theory of Self-Reproducing Automata; Burks, A.W., Ed.; University of Illinois Press: Urbana, IL, USA; London, UK, 1966. [Google Scholar]
- Hinton, G.E. Training products of experts by minimizing contrastive divergence. Neural Comput. 2002, 14, 1771–1800. [Google Scholar] [CrossRef] [PubMed]
- Batty, M.; Xie, Y. From Cells to Cities. Environ. Plan. B Plan. Des. 1994, 21, 31. [Google Scholar] [CrossRef]
- Cao, M.; Tang, G.; Shen, Q.F.; Wang, Y.X. A new discovery of transition rules for cellular automata by using cuckoo search algorithm. Int. J. Geogr. Inf. Sci. 2015, 29, 806–824. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Description |
|---|---|
| Y | Dependent variable, designated as 0 if the state of a non-urban cell is unchanged or 1 if a non-urban cell developed into an urban cell |
| DEM/Slope | The DEM and slope of Jiaxing City |
| Diswater | Euclidean distance from the cell to the nearest river calculated from land use maps in 2000, 2008 and 2015 |
| Disrailway | Euclidean distance from the cell to the nearest railway |
| Disroad | Euclidean distance from the cell to the nearest road in 2008 and 2016 |
| Distown | Euclidean distance from the cell to the nearest town center |
| Discounty | Euclidean distance from the cell to the nearest county center |
| Non-urban neighborhoods | Number of non-urban cells in the 7 × 7 extended Moore neighborhood at different times |
| Urban neighborhoods | Number of non-urban cells in the 7 × 7 extended Moore neighborhood at different times |
| Zoning suitability | Classes from land use planning and high quality prime farmland data in 2009 and 2015 |
| Land Use Type | Total Dataset | Gain and Loss | |||||
|---|---|---|---|---|---|---|---|
| 2000 | 2008 | 2015 | 2000–2008 | 2008–2015 | 2000–2015 | ||
| Non-urban | # | 935,339 | 829,325 | 735,610 | −106,014 | −93,715 | −199,729 |
| ha | 84,180.51 | 74,639.25 | 66,204.9 | −9541.26 | −8434.35 | −17,975.61 | |
| % | 85.115 | 75.468 | 66.94 | −9.647 | −8.528 | −18.175 | |
| Water | # | 50,587 | 48,919 | 45,437 | −1668 | −3482 | −5150 |
| ha | 4552.83 | 4402.71 | 4089.33 | −150.12 | −313.38 | −463.5 | |
| % | 4.603 | 4.452 | 4.135 | −0.151 | −0.317 | −0.468 | |
| Urban | # | 112,987 | 220,669 | 317,866 | 107,682 | 97,197 | 204,879 |
| ha | 10,168.83 | 19,860.21 | 28,607.94 | 9691.38 | 8747.73 | 18,439.11 | |
| % | 10.282 | 20.08 | 28.925 | 9.798 | 8.845 | 18.643 | |
| total | # | 1,098,913 | 1,098,913 | 1,098,913 | 0 | 0 | 0 |
| ha | 98,902.17 | 98,902.17 | 98,902.17 | 0 | 0 | 0 | |
| % | 100 | 100 | 100 | 0 | 0 | 0 | |
| Land Use Type | 2015 (Cell) | ||||
|---|---|---|---|---|---|
| Observed | Simulated by ANN-CA | Error | Simulated by DBN-CA | Error | |
| Non-urban | 735,610 | 731,762 | −3848 | 731,463 | −4147 |
| Water | 45,437 | 48,919 | 3482 | 48,919 | 3482 |
| Urban | 317,866 | 318,232 | 366 | 318,531 | 665 |
| Sum | 1,098,913 | 1,098,913 | 0 | 1,098,913 | 0 |
| ANN-CA Simulated land Use in 2015 (Cells) | Simulation Accuracy (%) | |||||
|---|---|---|---|---|---|---|
| Observed land use in 2015 | non-urban | urban | Producer’s accuracy | User’s accuracy | Overall accuracy | Kappa coefficient |
| 726,966 | 54,081 | 93.076 | 93.119 | 90.191 | 76.151 | |
| 53,715 | 264,151 | 83.101 | 83.006 | |||
| DBN-CA Simulated Land Use in 2015 (Cells) | Simulation Accuracy (%) | |||||
|---|---|---|---|---|---|---|
| Observed land use in 2015 | non-urban | urban | Producer’s accuracy | User’s accuracy | Overall accuracy | Kappa coefficient |
| 731,808 | 49,239 | 93.696 | 93.776 | 91.099 | 78.366 | |
| 48,574 | 269,292 | 84.719 | 84.542 | |||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Zhang, F.; Du, Z.; Ye, X.; Liu, R. Integrating Cellular Automata with the Deep Belief Network for Simulating Urban Growth. Sustainability 2017, 9, 1786. https://doi.org/10.3390/su9101786
Zhou Y, Zhang F, Du Z, Ye X, Liu R. Integrating Cellular Automata with the Deep Belief Network for Simulating Urban Growth. Sustainability. 2017; 9(10):1786. https://doi.org/10.3390/su9101786
Chicago/Turabian StyleZhou, Ye, Feng Zhang, Zhenhong Du, Xinyue Ye, and Renyi Liu. 2017. "Integrating Cellular Automata with the Deep Belief Network for Simulating Urban Growth" Sustainability 9, no. 10: 1786. https://doi.org/10.3390/su9101786
APA StyleZhou, Y., Zhang, F., Du, Z., Ye, X., & Liu, R. (2017). Integrating Cellular Automata with the Deep Belief Network for Simulating Urban Growth. Sustainability, 9(10), 1786. https://doi.org/10.3390/su9101786