1. Introduction
Renewable resources of energy have been increasing their penetration level in electrical grids. Some of these, such as wind and solar, have already reached a high degree of maturity. Others, however, are still under development, as the case of wave energy. Many studies on the wave energy resource have been carried out throughout the world [
1]. Just to cite some cases: the Atlantic Marine Energy Test Site (AMETS) on the west coast of Ireland [
2], the Sicilian coastline [
3], Northern Spain [
4], the Maltese coasts [
5], the Australian southeast shelf [
6], the East China Sea [
7], the Indian seas [
8], Brazil [
9], Peru [
10] and Uruguay [
11]. Therefore, due to the great energy potential of waves, the interest in this topic has been increasing worldwide, and the main challenge is to make it competitive against more affordable generation resources. Unlike wind energy, for example, there are different technologies to convert the wave energy into electricity. These devices, wave energy converters (WEC), are in different development phases, and some of them are even connected to the grid in test sites [
12,
13,
14].
WEC are usually classified according to their working principle, location and orientation; and the grouping of these devices can be found in [
12,
15] and the references therein. On the working principle, the WEC technologies are divided mainly into: oscillating water column (OWC), submerged pressure differential, overtopping devices, floating structures and impact devices; in terms of location, they can be classified as onshore, nearshore and offshore devices; and finally, according to their orientation: attenuator, point absorber and terminator. Another common classification derived from the working principles is presented in [
16], where the devices are divided into three great groups: oscillating water column, oscillating bodies and overtopping, with other subclassifications.
As a consequence of the increasing penetration of renewable energy, the electrical network structure has been changing, and it is migrating from a centralized generation model, where the power is generated in a few, large power plants far from center loads, to a hybrid model with distributed generation (DG), where many smaller plants are closer to the loads. This proximity between generation and consumption brings some benefits such as [
17]: the increasing of electric system reliability and the reduction of losses in distribution and transmission systems. DG systems can also aid in the grid support with ancillary services and in environmental issues, since most of these primary sources are non-polluting, as photovoltaic, wind, hydro and wave generation. The latter technology, unlike the others, is still under development, and its impact on the electrical grid and its compliance with the connection requirements are the subjects of current research.
DG systems are mostly connected to distribution grids, which are becoming a little more independent from the transmission networks. In this context, the question arises: is the distribution grid ready for DG systems? There is still much work to be done, since DG covers different types of primary resources, and each one has its singularities, not only in technical issues, but also in the grid codes that define the connection requirements. As stated in [
18], despite the advances in the development of adequate grid codes, they are still delayed with respect to the continuous increase in DG penetration levels. Furthermore, the different development stage of DG in different countries results in different grid connection requirements around the world. A review focused on weak power grids can be found in [
19], where the differences between the grid codes of interconnected and weak power systems are highlighted. From the point of view of wave energy, as the technical development is in an early stage, there are a few grid codes specifically addressed to it. However, wind energy grid codes can be applied to wave energy with minor changes due to their similarities, as shown in [
20]. In addition, grid codes have a strong influence on the WEC’s design and, therefore, on its cost [
21].
In relation to the positive impacts of DG on the electrical grid, achieving them is quite a hard task in practice, and other issues arise as voltage regulation, flicker, impact on short-circuit levels, etc. [
22]. In the case of WEC, an important point concerning power quality is the fluctuating characteristic of the generated power. The injection of such power into the grid results in voltage fluctuations. For medium and large wave power plants, these fluctuations are naturally smoothed, and they could be seen as flicker. For example, [
23] assesses the flicker level of a wave power plant with an installed power of 19.4 MW, and it shows that, for that specific power plant topology, there are some test cases in which the flicker levels exceed the limits recommended by [
24]. Thus, a mitigation method is required. On the other hand, in small power plants, the voltage fluctuations are smoothed to a lesser degree. Some approaches to mitigate them are presented in [
20,
25,
26] based on controlling the power take-off (PTO) system and/or using electrical storage systems. Another way is presented in [
27], where an initial study has been conducted with a balanced radial distribution grid. In this case, the strategy is to use the reactive power capability of the WEC power electronic converter to mitigate the voltage fluctuations, thus avoiding the need for additional energy storage equipment. Although the idea is interesting as a proof of concept, the implementation described in [
27] can only be applied to balanced systems, so it has to be adapted to real distribution grids, where the bus voltages are different in each phase.
This paper presents a control strategy applicable in real unbalanced distribution grids that implements the authors’ idea of exploiting the WEC’s own reactive resources for the mitigation of voltage fluctuations. To develop the proposed strategy, it is necessary to know how the unbalanced grid responds to the active and reactive powers from the WEC. To do so, an unbalanced three-phase load flow that is able to take into account the unbalance of loads, the asymmetry due to un-transposed lines and the presence of single-phase and two-phase lines has been implemented. The performance of the proposed strategy is assessed with a continuation load flow [
28] implementing a test distribution grid, coupled to a wave-to-wire model of the WEC [
29].
The paper is organized as follows:
Section 2 formulates the problem of voltage fluctuations caused by power variations along with some metrics;
Section 3 describes the implementation of the three-phase unbalanced load flow;
Section 4 presents the wave-to-wire model of the WEC;
Section 5 analyzes the voltage impact of the WEC connection;
Section 6 presents the proposed control strategy;
Section 7 shows the assessment of the strategy with simulation results; and finally,
Section 8 draws the main conclusions.
2. Voltage Fluctuations
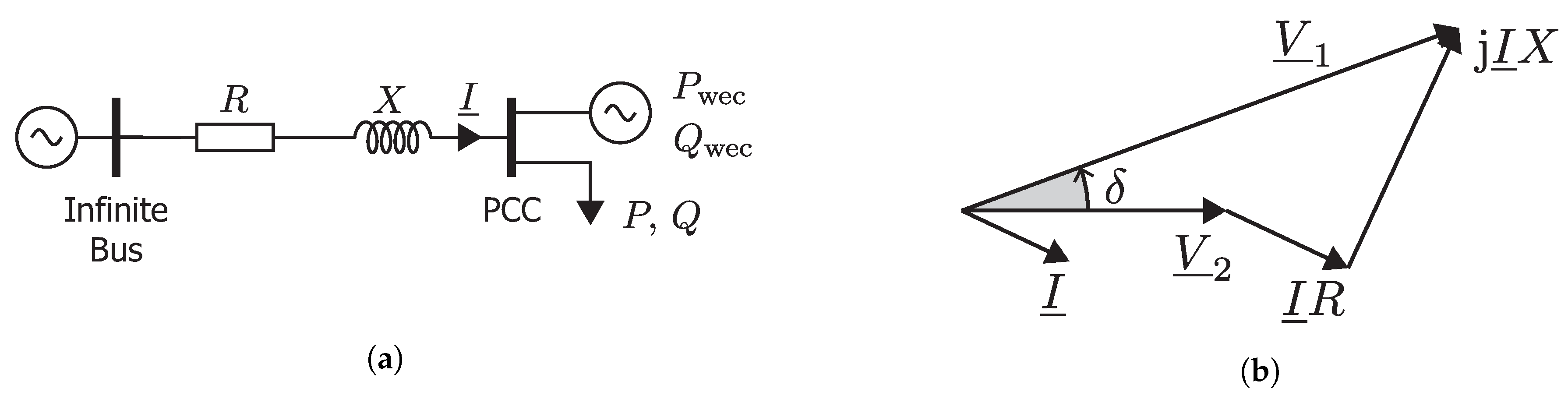
Assuming in a first approach a distribution grid as a balanced system, it can be represented by its Thévenin equivalent circuit from the point of common coupling (PCC), as shown in
Figure 1a. The feeder has two buses connected by a series impedance with resistance
R and reactance
X. The voltage at the beginning of feeder (infinite bus) is
(in this work, the underline variables represent complex quantities), and the voltage at PCC is
. The WEC is modeled as a PQload, i.e., the active and reactive powers injected by the WEC (
and
) are independent of voltage.
is a nonnegative quantity, while
could be both positive or negative. In addition to the WEC, a load that absorbs constant active and reactive powers (
P and
Q) is connected to the PCC.
The phasor diagram of the equivalent circuit is shown in
Figure 1b, where the voltage of the infinite bus is
. With
and the complex power absorbed at PCC
, the voltage at the infinite bus can be expressed in terms of power as follows:
In distribution systems, the load angle
(
Figure 1b) is usually small. Hence, the imaginary part of Equation (
1) is approximately zero, then
. As
is constant,
is only a function of
and
, which can be expressed as:
Similar to [
30], the voltage variation at PCC due to differential variations in active and reactive powers can be calculated as:
In transmission grids, the ratio is high, so the voltage is mainly sensitive to reactive power variations. However, in distribution grids, the ratio is lower, and the PCC voltage is sensitive to variations in both active and reactive powers. Therefore, the natural fluctuations in the active power generated by a WEC lead to voltage fluctuations at the PCC. On the other hand, the sensitivity to the reactive power allows one to use the reactive capability of the WEC converter as a countermeasure to mitigate the voltage fluctuation.
2.1. Voltage Fluctuation Metrics
The voltage fluctuation for balanced networks can be quantified as shown in [
31]. This concept can be extended to an unbalanced three-phase system as follows:
where
is the voltage fluctuation index at bus
k and phase
along the
T time samples. It is clear that, for a given period, the more the time samples, the lower the index. Therefore, the sampling time must be chosen as high as compatible with no significant loss of information on the voltage fluctuation.
In addition, a global metrics that quantifies the voltage fluctuation of the grid is presented in [
32], the system average voltage fluctuation index (SAVFI):
where
N is the number of grid buses and
is the SAVFI per bus, an intermediate index defined by:
where
and
are, respectively, the number and set of phases at bus
k.
4. Wave-To-Wire Model
A wave-to-wire model of a WEC is a mathematical model able to simulate or to emulate the whole energy conversion chain, i.e., from the wave energy absorption stage up to the electrical grid connection, as shown in
Figure 2, where the WEC is schematically represented by its PTO system and buoy. Particularly, the system in
Figure 2 is defined as a direct-drive system, since the mechanical energy from the waves is directly converted into electricity. The Archimedes Wave Swing [
36] and the Uppsala/Seabed AB [
37] are examples of direct-drive systems.
In this work, according to the classification proposed in [
16], a point absorber has been considered, and the details about the WEC dynamics can be found in [
29,
38]. This absorber is a cylindrical buoy limited to heave motion and rigidly connected to the PTO system. The radius of the cylinder is 5 m; the height is 10 m; and it is submerged 10 m below the free surface. The PTO system is the linear permanent magnet synchronous generator described in [
36].
In this system, the wave irregularities both in height and in period are transmitted to the generated electricity. Thus, direct drive systems must be implemented with power electronic converters to interface with the electrical grid. In
Figure 2, the generator-side converter is responsible for the AC-DC conversion stage and for the WEC control by means of a current controller. On the other hand, the grid-side converter is responsible for the DC-AC conversion stage, and it can be also used to help to comply with some grid connection requirements by means of a VSC (voltage source converter) controller. The current controller is implemented with the resistance emulation (
) approach [
29], and a strategy to mitigate the voltage fluctuations (described later) is implemented with a PWM-based VSC controller under unbalanced input voltages [
39].
6. Corrective Actions Based on VAR Compensation
As mentioned in
Section 4, the WEC connects to the grid through power electronics. The grid-side converter is responsible for keeping the DC voltage
constant by transferring the active power from the electrical generator to the grid. Although this is its main task, it is important to note that the grid-side converter is also capable of interchanging (generating or absorbing) reactive power with the grid, within given limits that are defined by a maximum current,
, or a Volt-Ampere (VA) constraint
. Thus, the reactive limits depend on the active power injected by the WEC:
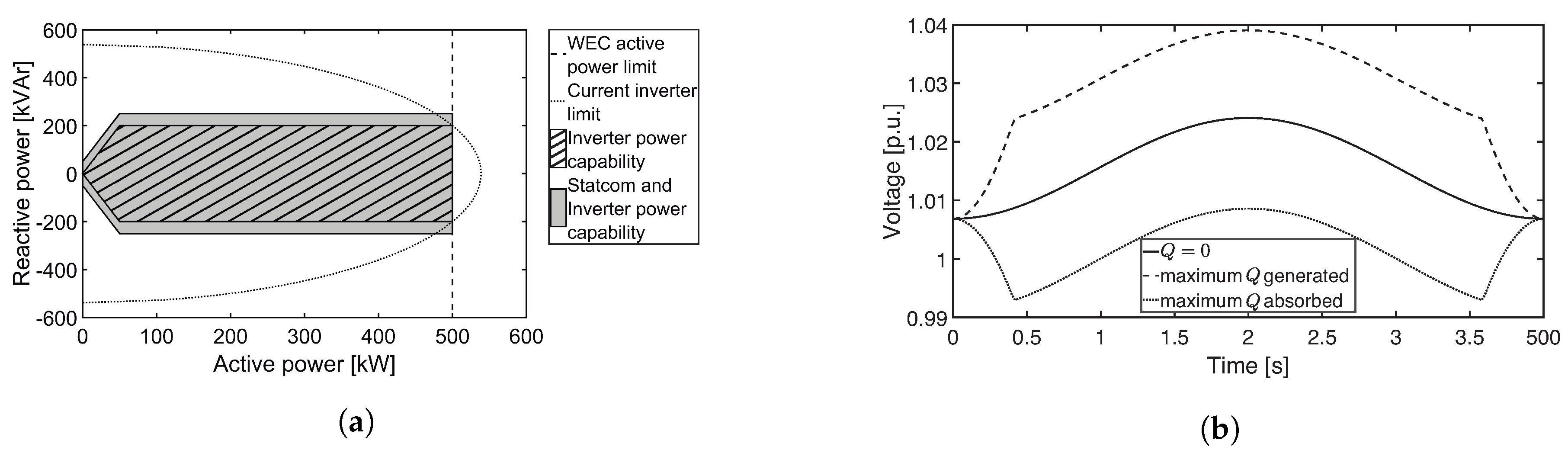
The dotted line of
Figure 5a represents these limits in the case of the converter used in this work. However, the real active power is bounded by the WEC rating (dashed line). Stability and other practical issues impose other limits on the reactive power, so that the real active and reactive capabilities of the converter are limited to the hatched area of
Figure 5a.
To illustrate the inverter’s ability to generate or absorb reactive power according to the generated active power, let us consider the power production from a regular wave:
where
(the WEC power rating) and
is the power period. The solid line of
Figure 5b represents the voltage fluctuation at PCC due to the injection of this fluctuating active power with no interchange of reactive power. The dashed and dotted lines represent the corresponding voltage evolution if the reactive power is set to its maximum and minimum limits, respectively. If the reactive power is set to operate in any other value within these limits, the voltage values would be within the area defined by these lines in
Figure 5b for this particular power profile. Therefore, any voltage trajectory within this area (for example, with less fluctuations) is reachable by controlling the reactive power. A desirable situation is to keep the voltage constant. For example, in a balanced system, the control variable is the PCC rms voltage, as in [
27].
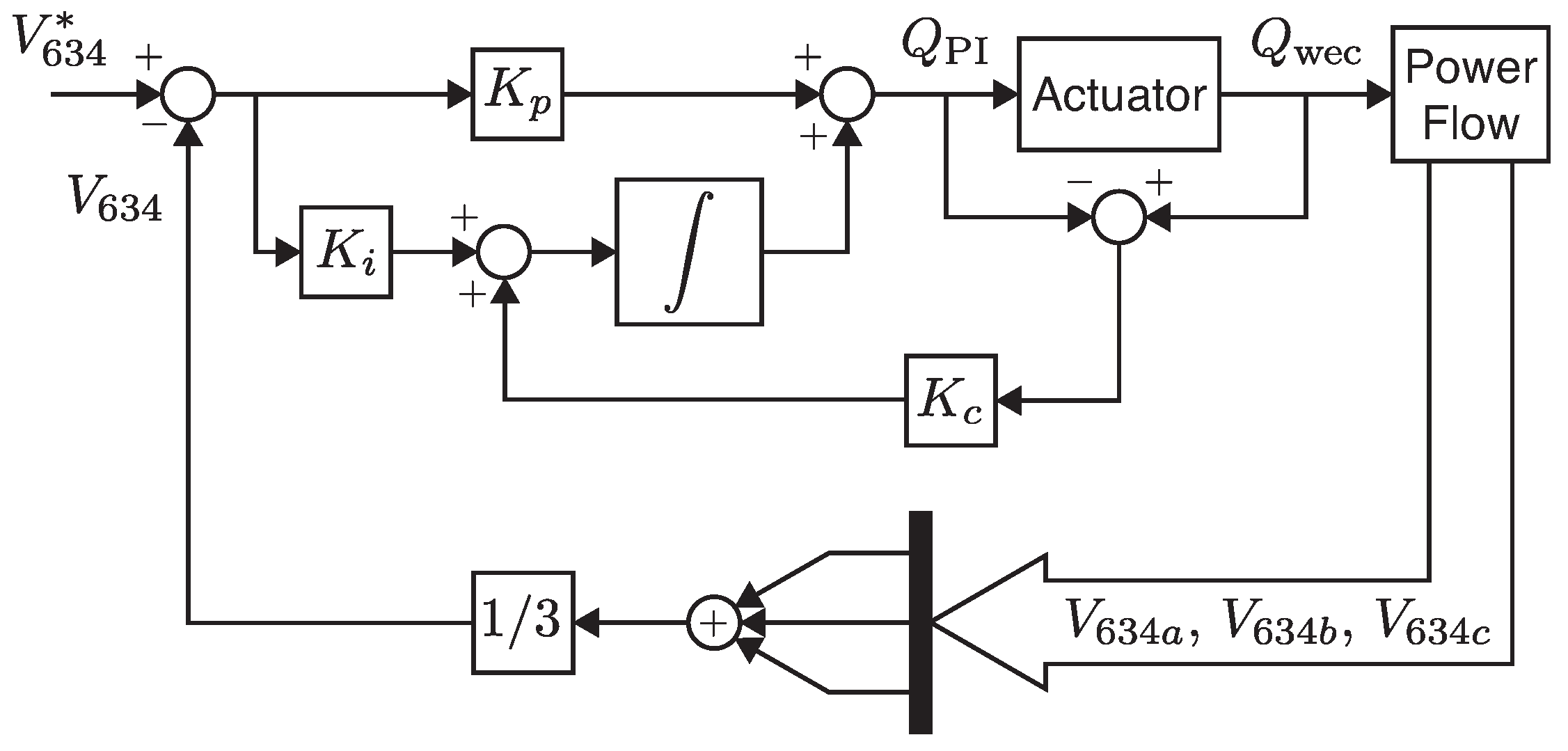
In real unbalanced systems, as the one described in this paper, the bus voltages are different in each phase. On the other hand, the grid-side converter is composed of one three-phase inverter, which is only able to generate three-phase balanced reactive power from just one control variable. To implement this control, in this work, we propose to use the mean bus voltage defined as the mean of the rms voltage in each phase of a bus. For instance, the mean bus voltage of bus 634 is .
As the electrical grid dynamics is much faster than the generated power dynamics, the distribution grid in
Figure 3 can be simulated as a quasi-static model, i.e., the voltage phasors in each bus and phase are calculated in steady state for a given
that varies in time. Finally, the amount of reactive power generated by the inverter is calculated in the reactive power control loop inside the VSC controller shown in
Figure 6. The plant is the power flow discussed in
Section 3, where the outputs are the three-phase rms voltages. The PI controller has been tuned to be as fast as possible. Besides, as the reactive power is bounded, an anti-windup system has been implemented. Note that, in the reactive power control loop, the dynamics is only due to the PI controller and the anti-windup system.
Sometimes, the reactive capability of the inverter is not high enough to completely mitigate the voltage fluctuation. In this case, a STATCOM could be used to provide extra reactive power. In this work, a 50-kVAr STATCOM is implemented as a reactive power load at Bus 634. The combination of both inverter and STATCOM results, in practice, in an expansion of the operating area of the reactive compensation as shown in the grey area in
Figure 5a. In this case, the reactive power of the STATCOM is
, with
. Once the STATCOM reaches its limit, the voltage becomes uncontrolled. The STATCOM is only on when
, i.e., the grid requires more reactive power to keep the voltage level than the grid-side converter capability.
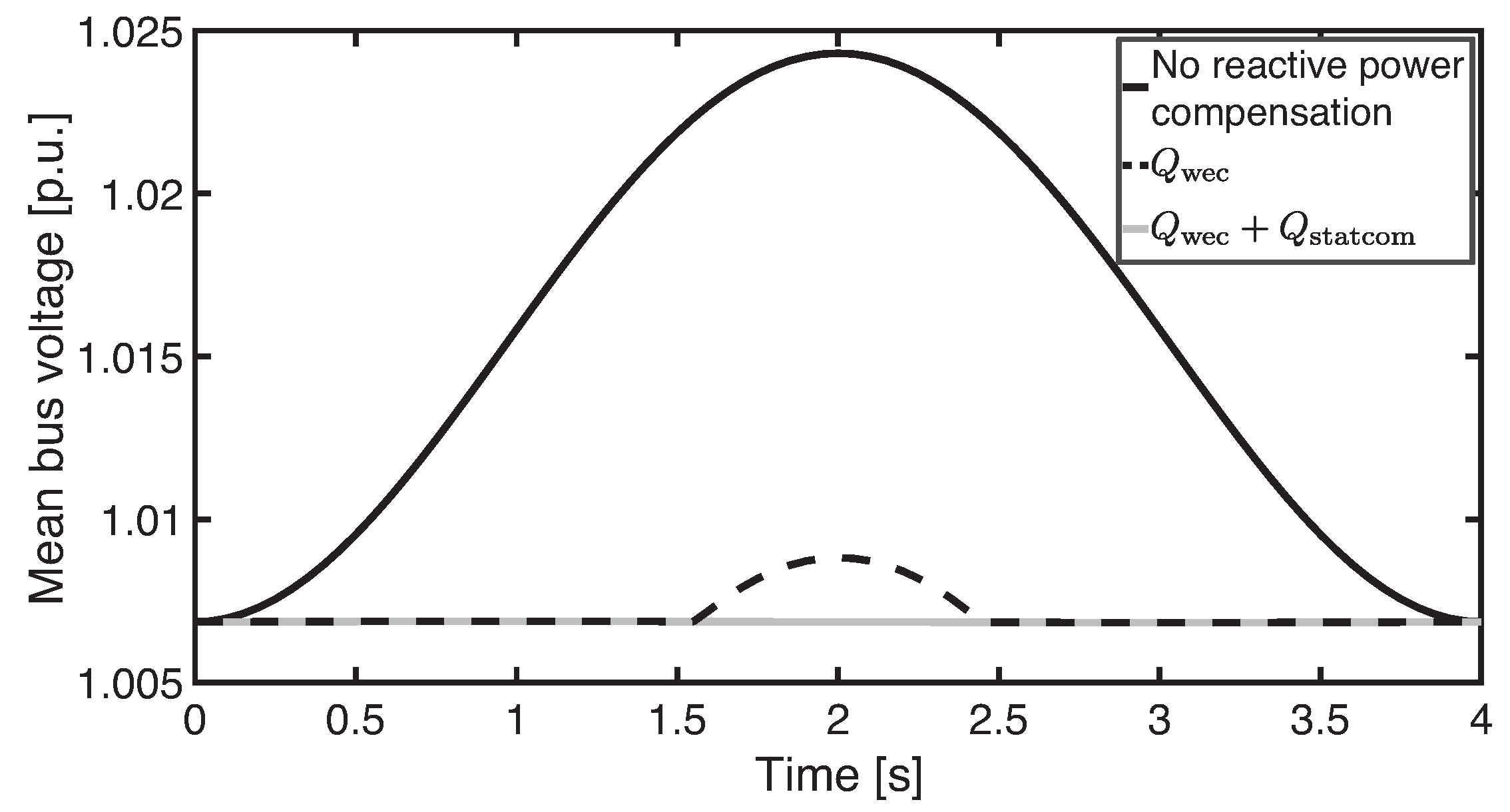
To illustrate this controller behavior, the sinusoidal power in Equation (
10) has been injected into Bus 634. The black solid line in
Figure 7 is the mean bus voltage fluctuation at this bus (
). The reference voltage
controller is set to the value of
for the default network. If only the inverter is operating and its controller is enabled,
is kept at its reference value for almost all the time, as shown in
Figure 7 by the dashed line. After about 1.5 s, the inverter reaches its reactive power limit, and therefore, the voltage is uncontrolled and varies according to
. On the other hand, when both the inverter and STATCOM are operating, the voltage fluctuation is completely mitigated as shown in
Figure 7 by the grey line. In this latter case,
, i.e., the STATCOM absorbs 25 kVAr at this instant; therefore, it is half loaded.
7. Simulation Results
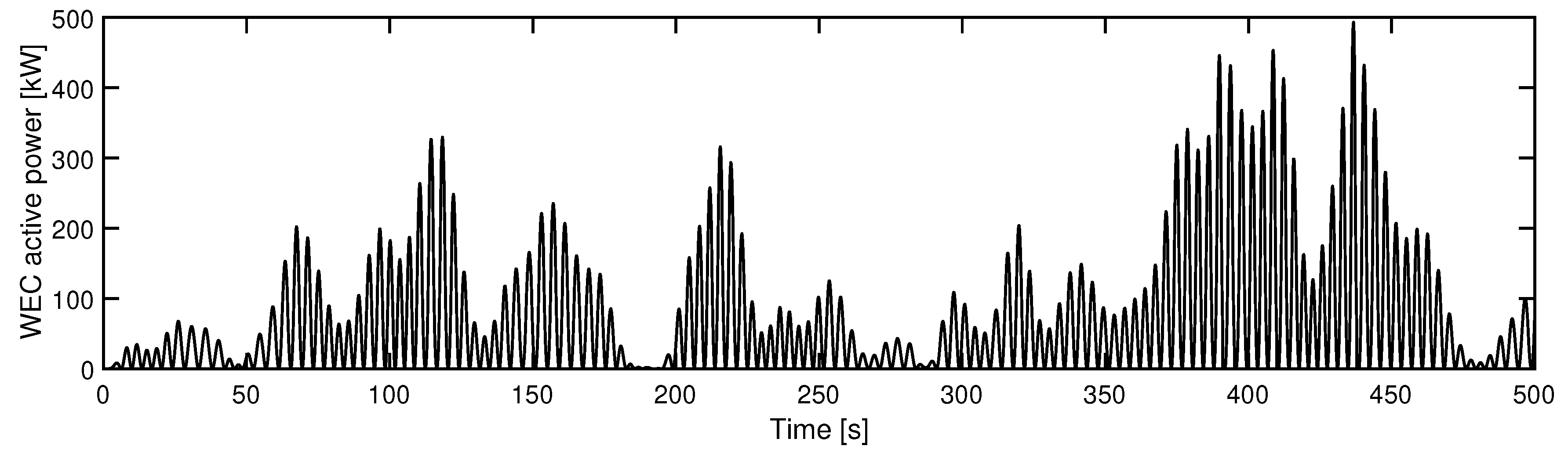
In this section, the voltage fluctuation due to a very variable power injection into the grid, as well as the proposed actions to mitigate this fluctuation are assessed. For this purpose, the WEC is connected to the electrical grid as shown in
Figure 2 through Bus 634, and it is excited by an incoming wave mathematically generated from the ITTC spectrum [
41], defined by its statistical parameters: significant wave height (
) and energy period (
). The electrical power delivered to the grid is shown in
Figure 8. As described in
Section 6, the correction actions assessed are based on the generation or absorption of reactive power by the grid-side converter or the combination of both grid-side converter and STATCOM.
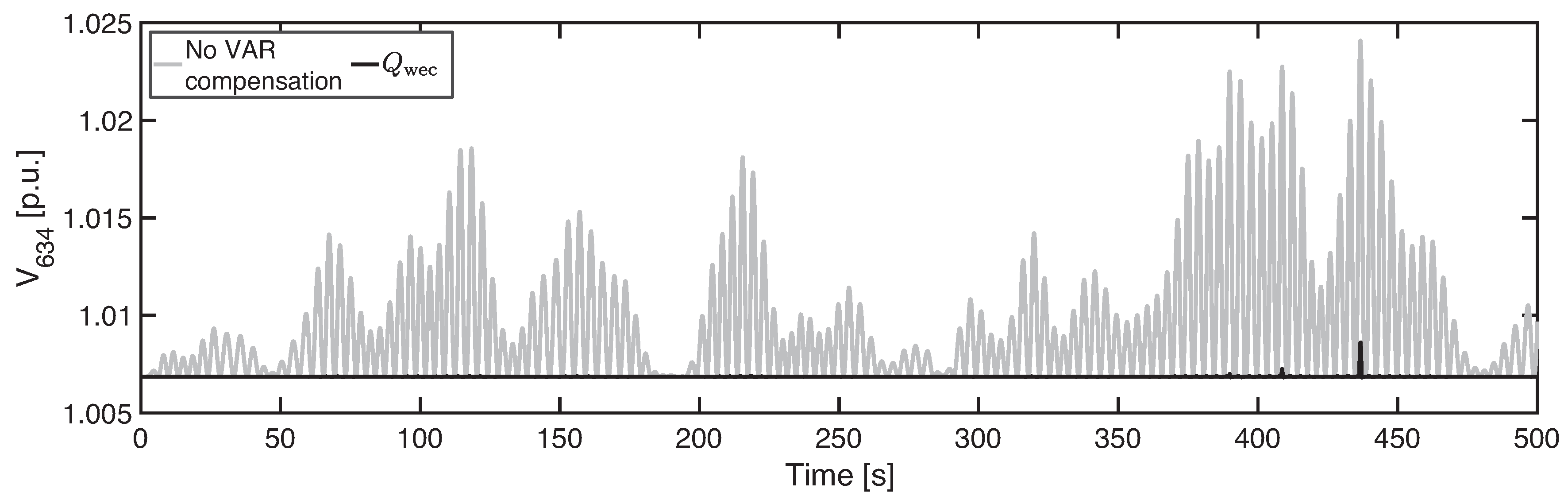
The fluctuation of the mean bus voltage caused by the WEC on the PCC without VAR compensation is shown in
Figure 9 (grey line). The waveform of the voltage fluctuation follows the injected power waveform. When the injected power reaches its highest value, the voltage is about 1.7% higher than the default case. This value may seem low, and in addition, it is within permissible deviation ranges. However, areas with greater waves generate higher fluctuations. Furthermore, according to the first term in Equation (
3), the voltage increment depends on the the grid stiffness. Therefore, in weaker grids, with higher
R, these effects are amplified.
Figure 9 also shows the mitigation effectiveness with the use of VAR compensation by the grid-side converter according to the proposed control strategy. The corrected mean bus voltage
(black line) is kept constant almost all the time. Only when the power excursion experiments high values, as between 400 and 450 s, the WEC is not able to keep
at its reference value.
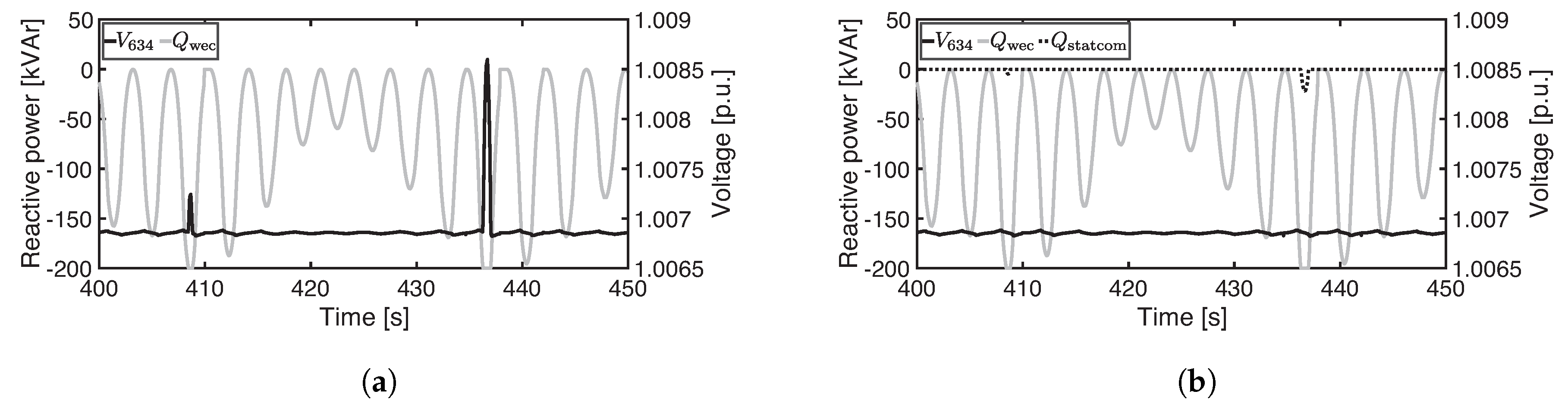
The detail of the the mean bus voltage
within the interval between 400 and 450 s and the VAR compensation is shown in
Figure 10a. The black line is
, and the grey line is the amount of reactive power injected by the grid-side converter. As the active power generated by the WEC drives
above its reference value, the grid-side converter operates absorbing (negative injection) more or less reactive power to mitigate the fluctuations. As previously commented, in this interval, the grid-side converter has reached its limit twice; then, during these short periods, the voltage is no longer controllable, and it varies according to the WEC active power. On the other hand, if, in addition to the grid-side converter, the VAR compensation is complemented by the STACOM, the voltage fluctuations are completely mitigated as shown in
Figure 10b. It is clear that the greater reactive power contribution is done by the grid-side converter, and the STATCOM just occasionally complements the VAR compensation. Indeed, in this scenario, the STATCOM is practically not necessary, since the variation in
Figure 10a is negligible.
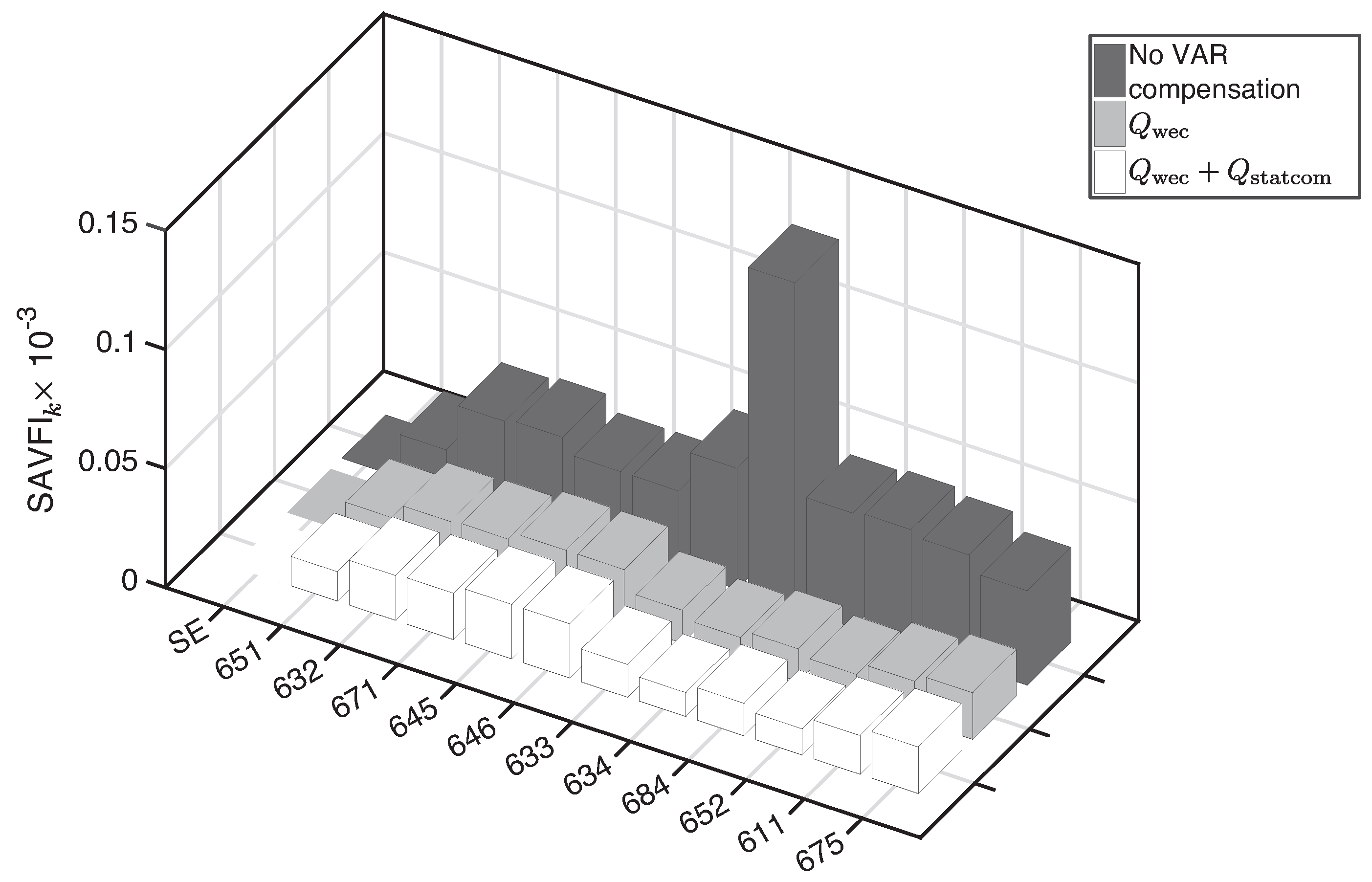
So far, only the mitigation of the mean bus voltage has been assessed. However, this is not the real voltage. As an unbalanced system has been considered, each phase at each bus may have different fluctuations depending on the grid topology and the load level per phase. The voltage fluctuation may be assessed by the SAVFI per bus (Equation (
6)) as shown in
Figure 11, where it is possible to see how the voltage fluctuation propagates along the buses. As expected, the PCC (Bus 634) presents the highest fluctuations, and the combination of grid-side converter and STATCOM does not represent a significant improvement for the grid. However, it is interesting to have its usage in mind, since the WEC reactive capability may be reduced by the WEC commitment with some other grid requirements [
19], for example to comply with low-voltage ride-through requirements. It is also easy to see that the buses farther from the infinite bus are more susceptible to fluctuations, and at the same time, they present a much better response to VAR compensation.
Table 1 summarizes the SAVFI reduction per bus after VAR compensation. Only Buses 651, 645 and 646 present a reduction lower than 50% due to a stiffer connection to the infinite bus. The global SAVFI, in turn, is reduced by 65.95%.
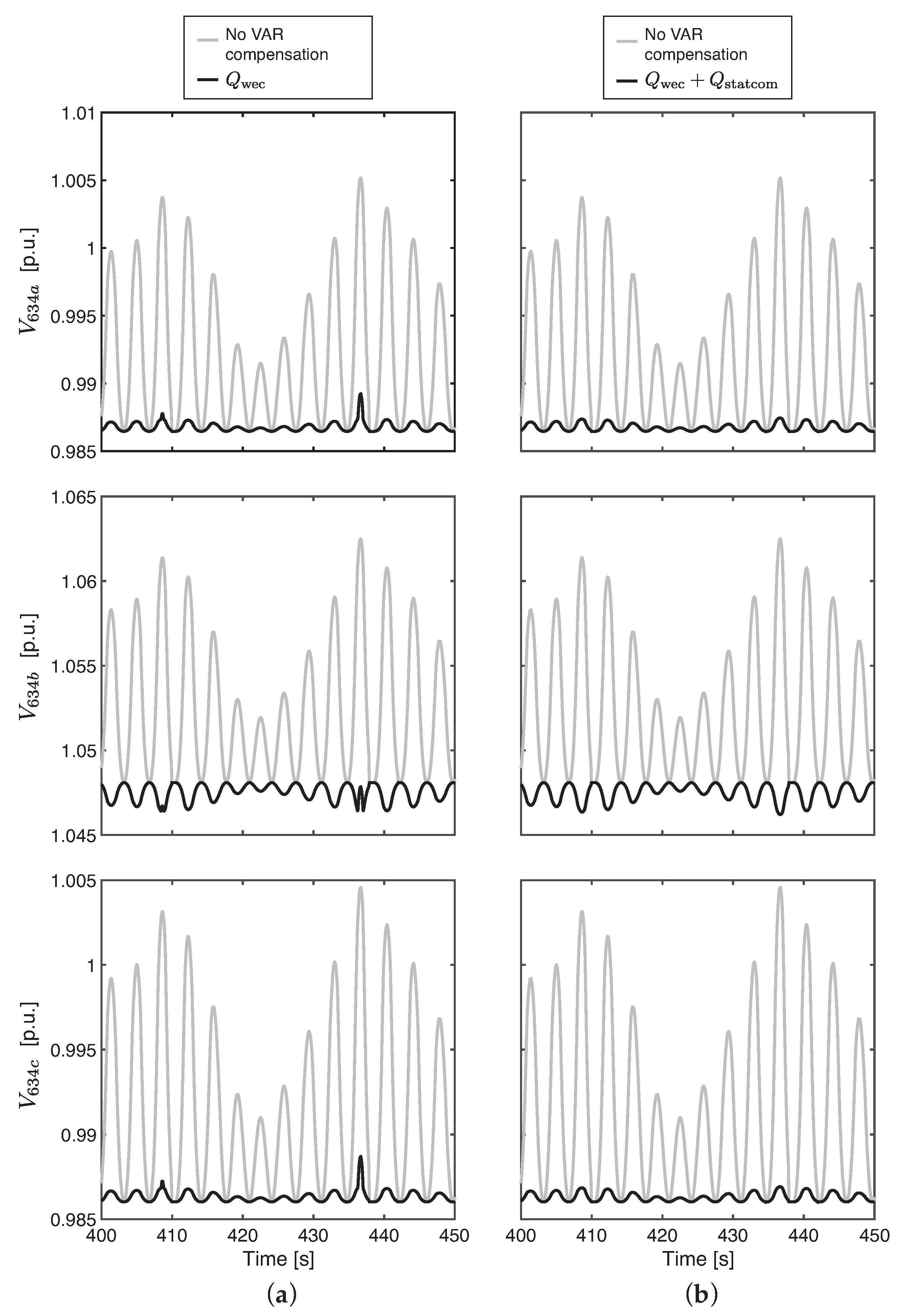
Figure 12 shows the per-phase voltage fluctuation at Bus 634 without and with VAR compensation, where the left column is for the grid-side converter and the right one is for both the grid-side converter and STATCOM. As was verified for the mean bus voltage, the STATCOM backs the grid-side converter up just during high peaks of power. In addition, the fluctuation reduction in phase-b is lower than phase-a and -c. In any case, the VFindex achieves a great reduction. For example, at Bus 634, the VF is reduced by 94.43%, 86.50% and 94.73% in phase-a, -b and -c, respectively.
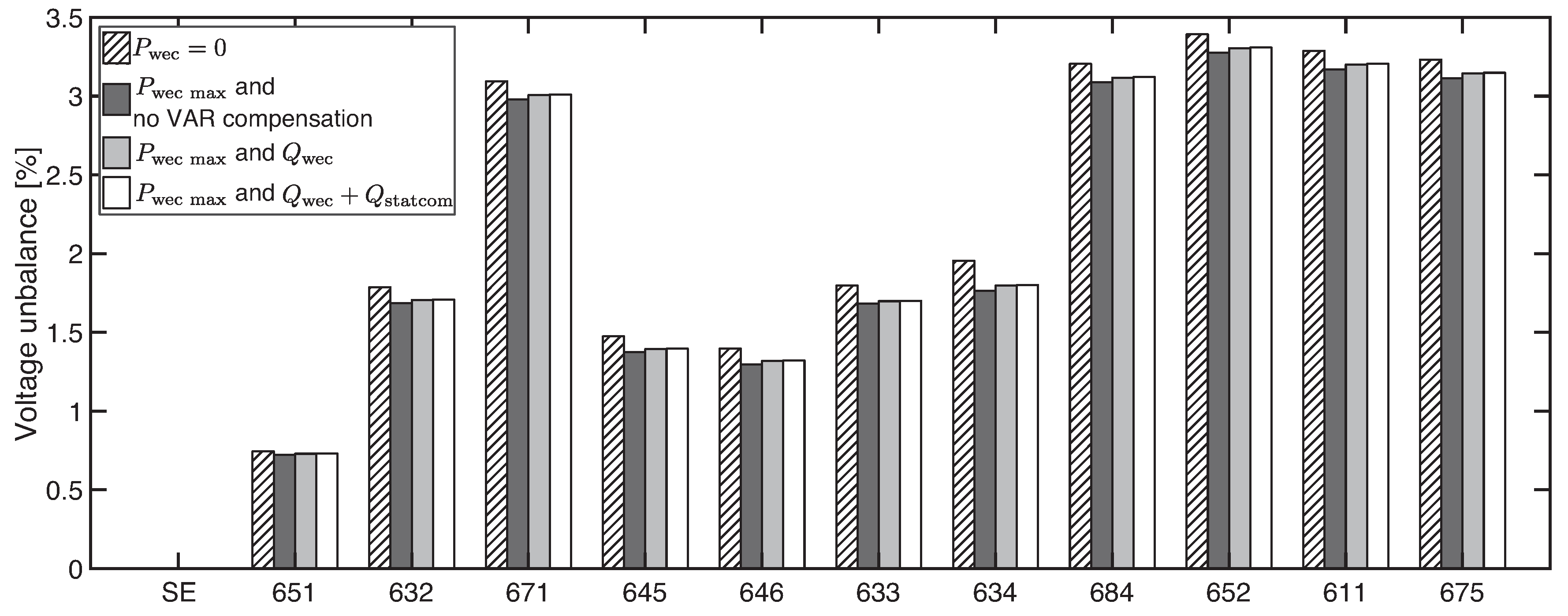
Finally, to quantify the voltage unbalance in the test grid, the percent voltage unbalance factor defined as the ratio of the negative sequence voltage component to the positive sequence voltage component is used [
42].
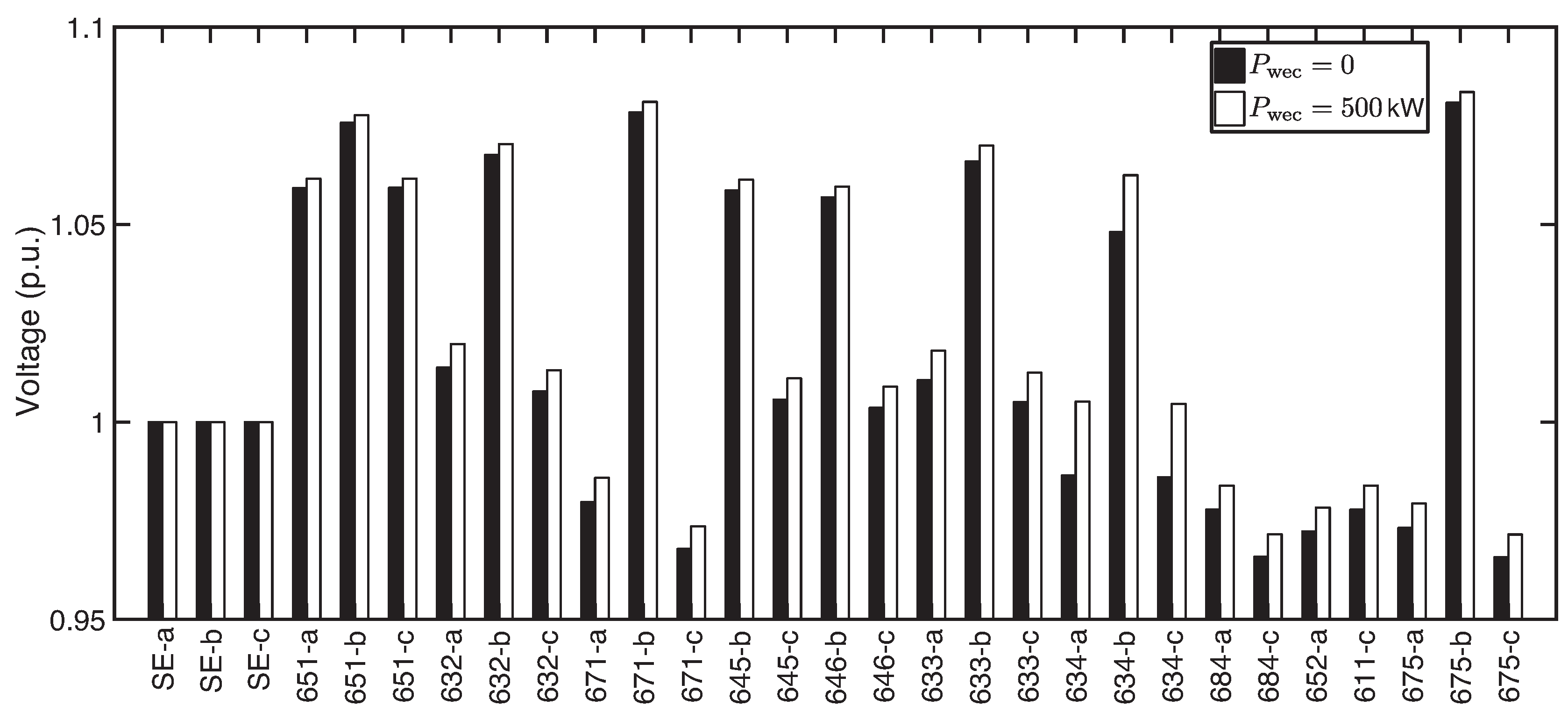
Figure 13 shows the voltage unbalance factor in each bus of the test grid for null active power injected by the WEC and for the maximum active power injected by the WEC. In addition, for the latter case, three different scenarios are shown: no VAR compensation, VAR compensation by the grid-side converter and by the combination of grid-side converter and STATCOM.
It can be seen that the test grid has an important voltage unbalance for
, even with values exceeding the typical ones: 0.5–2% [
43]. The injection of a balanced active power by the WEC contributes to a small reduction of the voltage unbalance as shown in
Figure 13 for the maximum
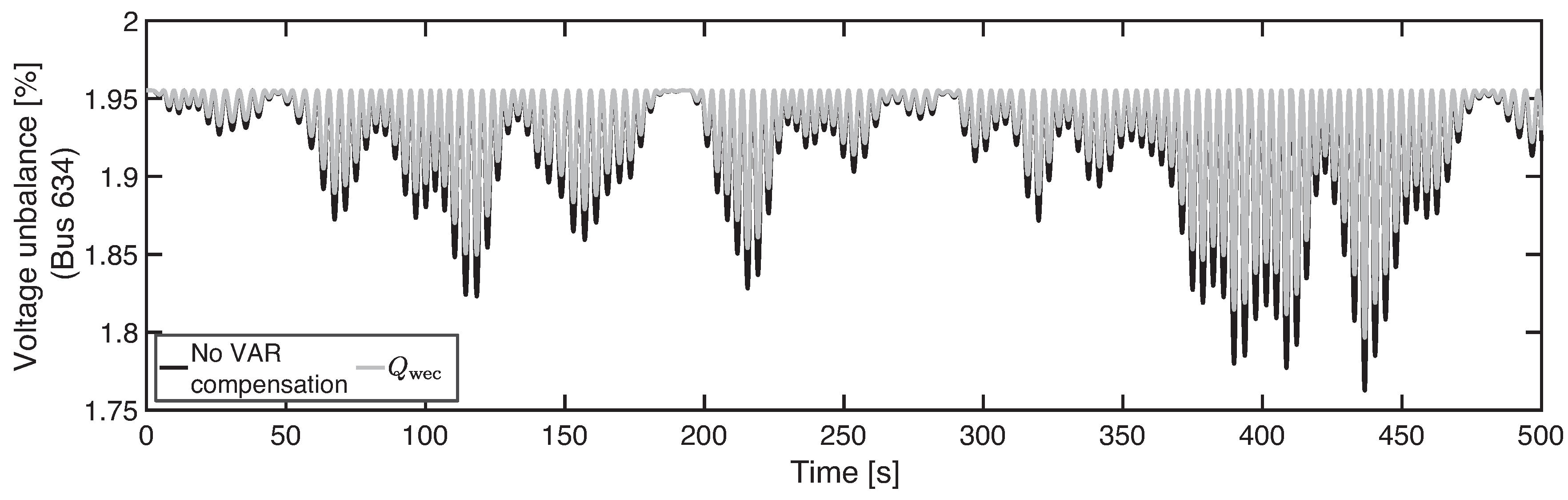
. The consumption of reactive power by the grid-side converter due to the corrective action adopted to mitigate voltage fluctuations results in a very small increase of the unbalance voltage factor with respect to the case without VAR compensation. Furthermore, the effect of an extra VAR compensation by the STATCOM on the unbalance voltage is insignificant in this case. Considering the unbalance voltage along time,
Figure 14 shows the behavior of the unbalance voltage factor at PCC according to the injection of active and reactive powers by the WEC. The mean of the voltage unbalance factor within the period (500 s) is 1.928% without VAR compensation, whereas it slightly increases to 1.933% if the proposed fluctuation compensation technique is applied. As conclusion, the technique is effective at compensating voltage fluctuations without practically affecting the unbalance. Further research is suggested to expand the capability of the technique to incorporate improvements on the voltage unbalance.
8. Conclusions
Despite the incipient development status of WEC technologies, some of them have been already connected to the electrical grid in test sites and more are expected in the near future. Thus, studies on the impact of their connection and compliance with grid requirements are needed. The WEC locations and their power level lead to a connection to distribution grids, which are normally unbalanced and more sensitive to active power variations than transmission grids.
In this work, the connection of a WEC to an unbalanced distribution grid has been analyzed showing that the oscillating active power injection from the WEC leads to a similar fluctuation in the voltage of the different phases and buses. A strategy for mitigating these fluctuations based on using the VAR capability of the grid-side converter of the WEC has been proposed. As grid-connected converters are typically three phase, the reactive power control is made by means of just one control variable. The proposed mean bus voltage has been demonstrated to be a simple yet effective choice.
In some cases, as the one presented in this paper, the WEC converter is able to mitigate the voltage fluctuations. In other cases, a STATCOM can be used to provide an extra VAR support that, in addition, might be useful if the WEC is committed to other grid requirements that would reduce the WEC reactive capability.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}