Similarity Measures of Remotely Sensed Multi-Sensor Images for Change Detection Applications

Abstract
:1. Introduction
- those that operate a preliminary feature extraction or classification of the images and then search for transitions of the pixels from one feature to another (hence, permitting a boolean comparison and a direct yes/no response for the change/no-change definition);
- methods that estimate the difference of the radiometric values of the image pixels (via a straightforward subtraction or using ratios, also in logarithmic form, as is common practise for SAR images) and then establish if a change occurred based on thresholding criteria. Similarity measures belong to this second group.
2. Similarity Measures

- Measures using only the probabilities:
- distance to independence
- mutual information
- cluster reward algorithm (CRA)
- Measures combining probabilities and radiometric values:
- normalized standard deviation or Woods criterion (for this measure two different formulations will be discussed)
- correlation ratio.
2.1. Distance to Independence
2.2. Mutual Information
2.3. Cluster Reward Algorithm
2.4. Woods Criterion
2.5. Correlation Ratio
3. Robust Measures
3.1. Robust Woods Criterion
4. Experimental Approach
- Ground control points were selected by visual inspection for a preliminary “manual” coregistration
- Fine coregistration was then performed using, in turn, an automatic selection of the homologous points in the image pairs based on the CRA. Indeed, this was the method providing the best accuracy according to the tests reported in [19] (the relevance of a precise coregistration is great in every change detection process as put into evidence in [26])
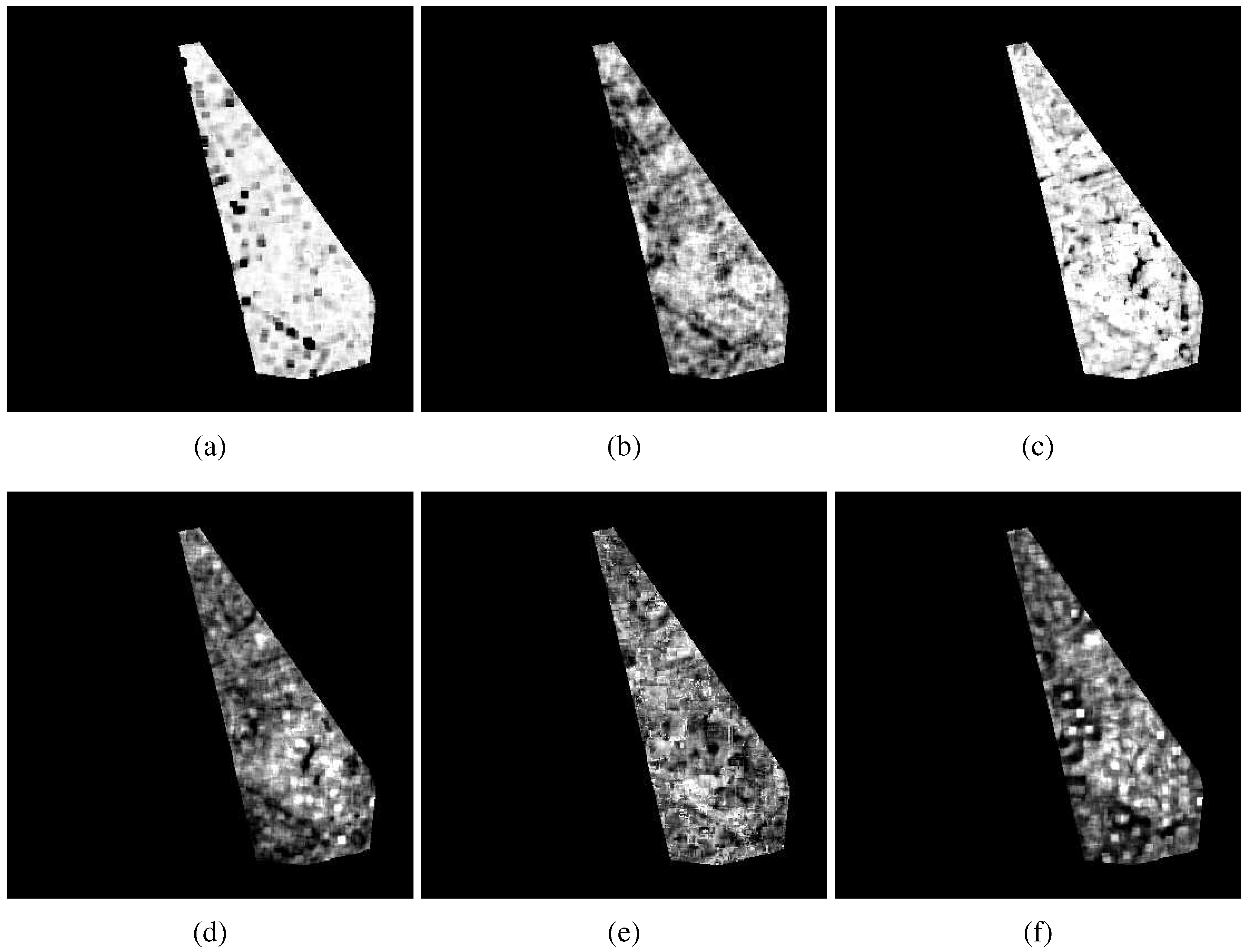
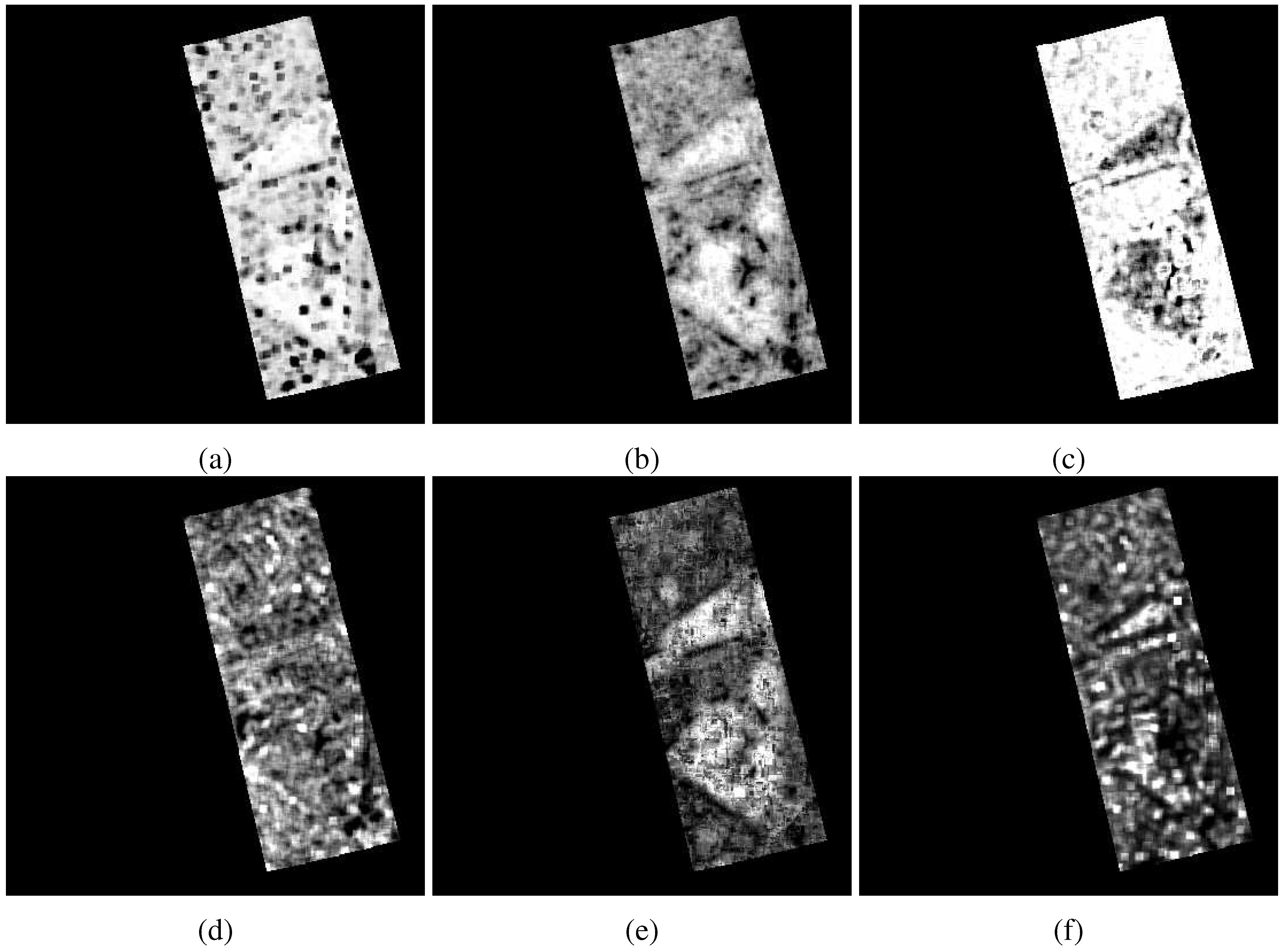
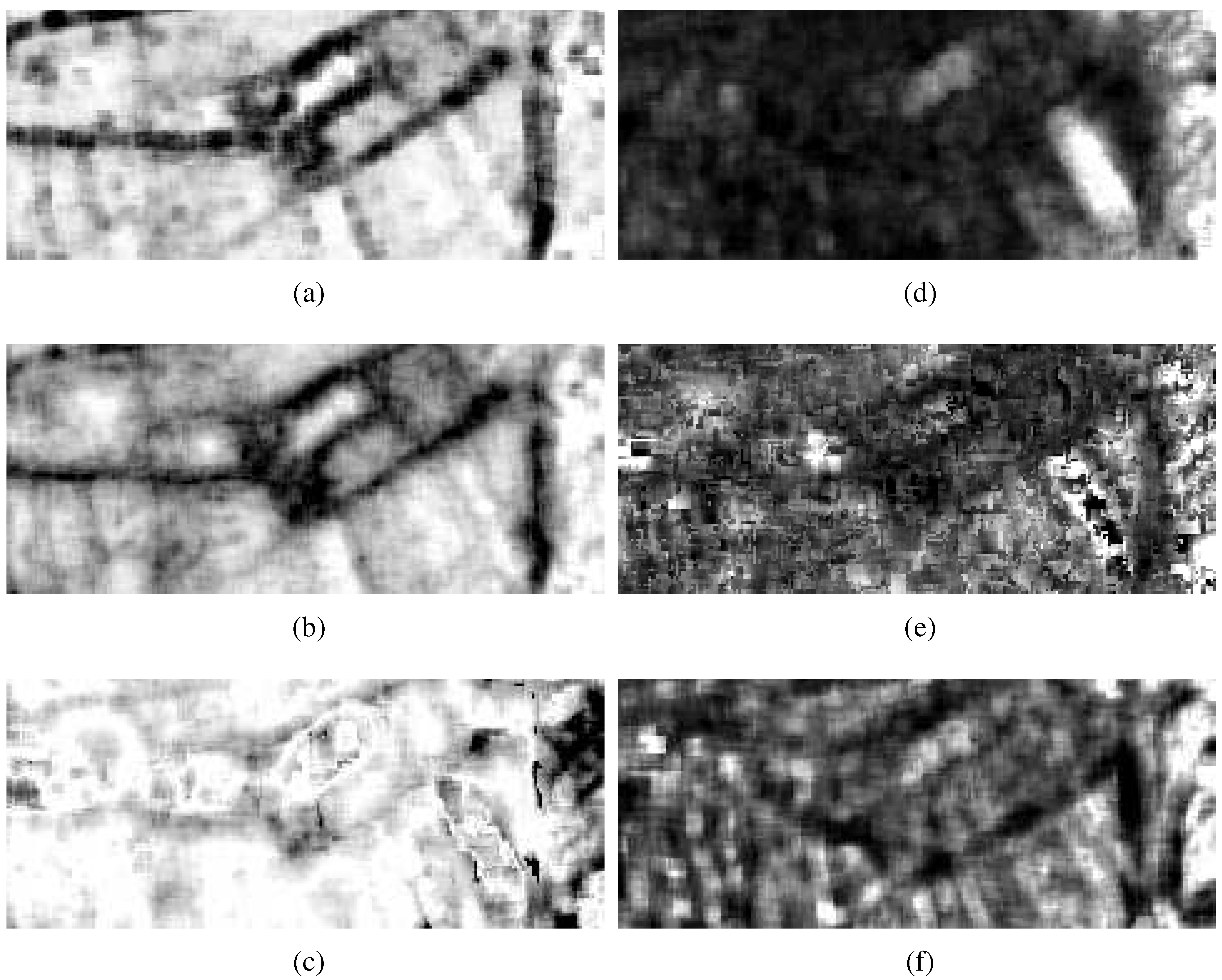
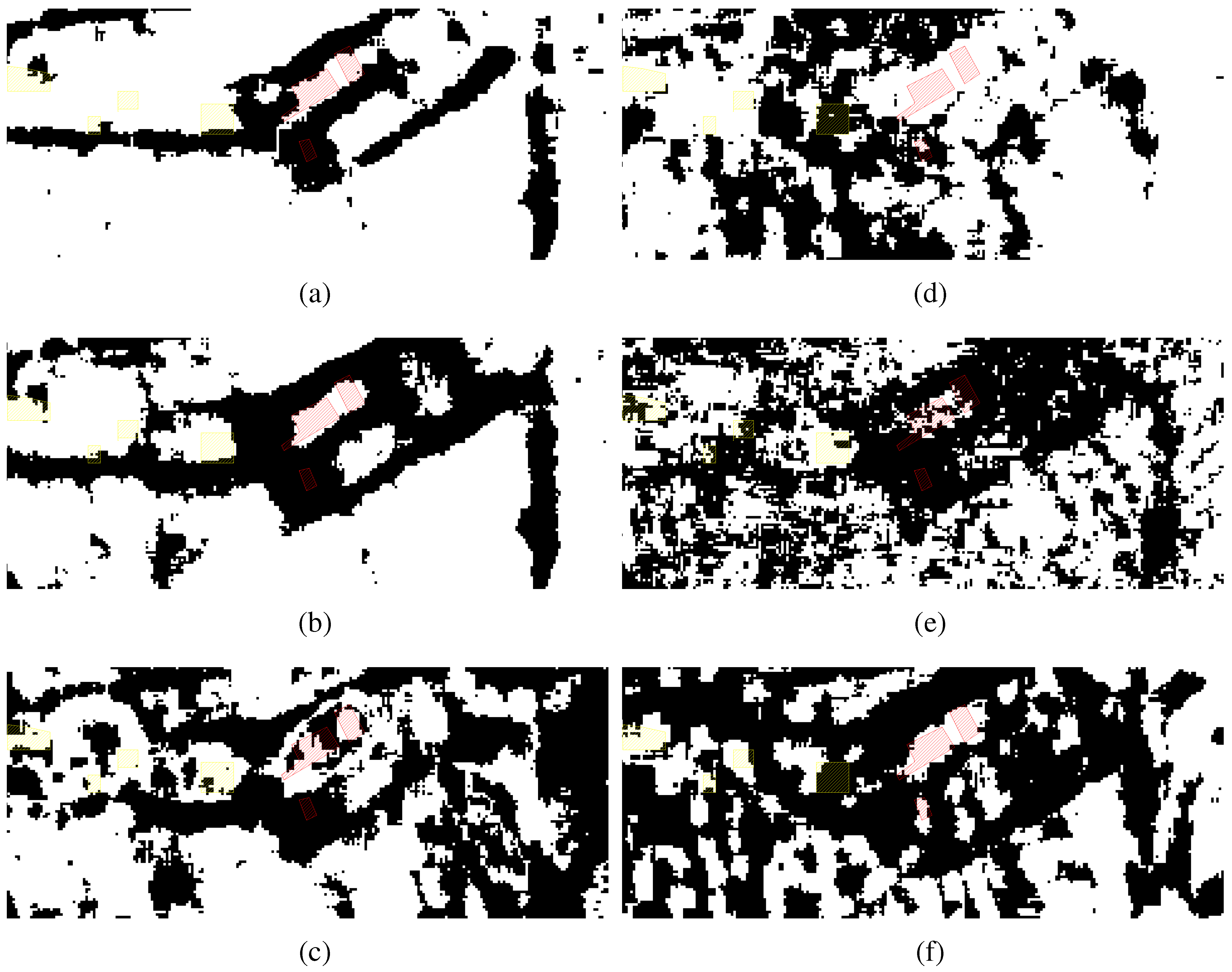
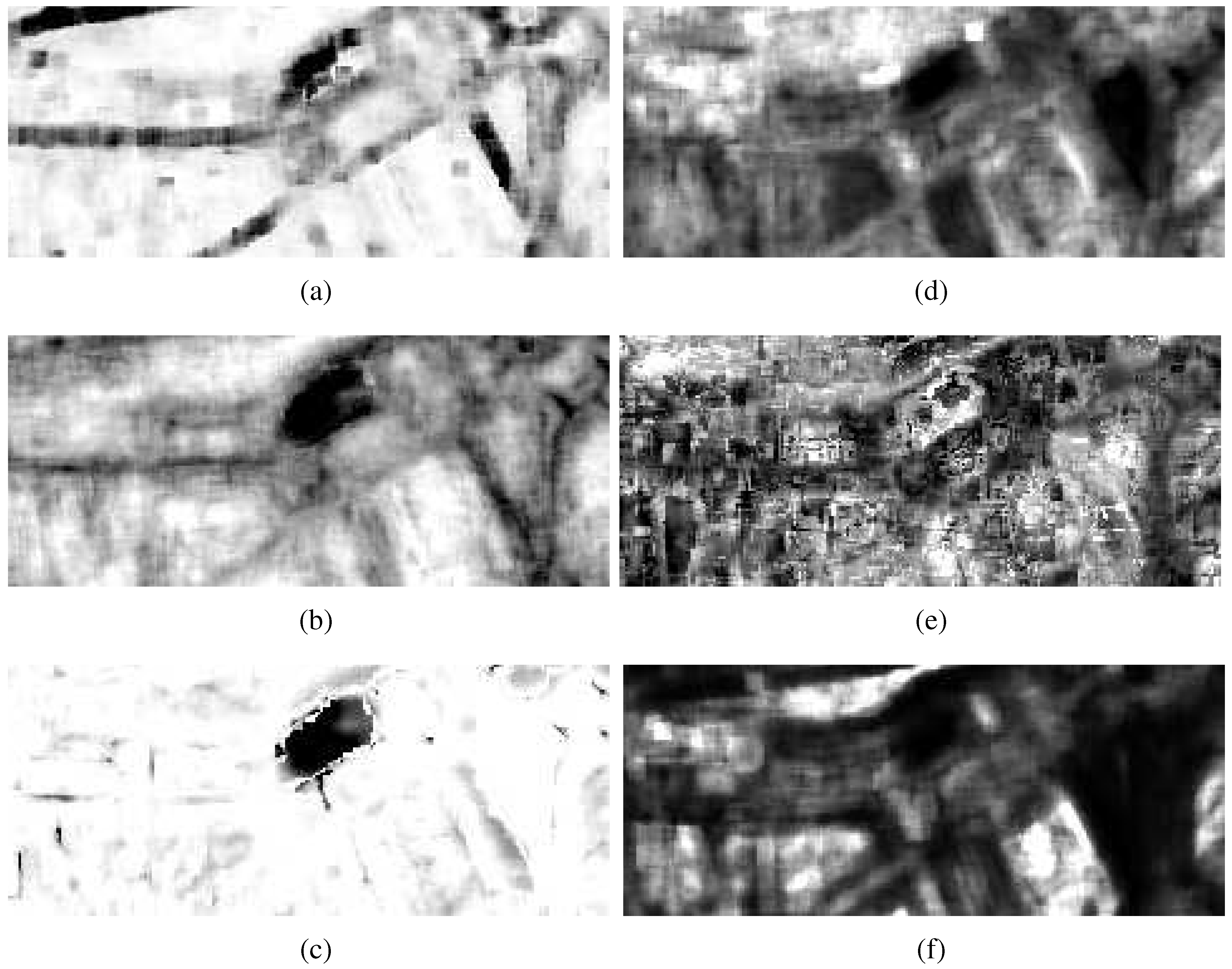
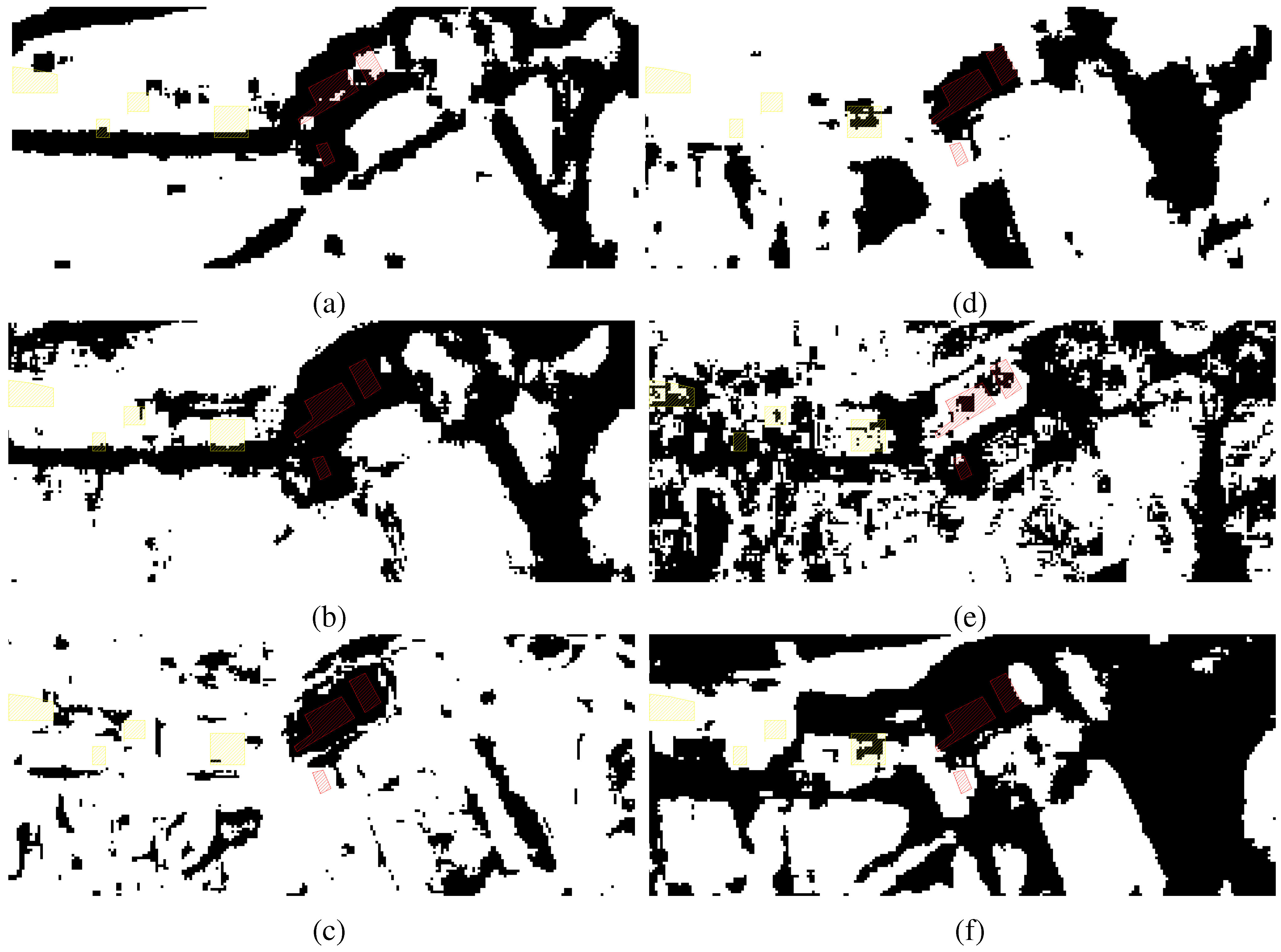
- Each similarity measure was expressed in normalized form (i.e., rescaled to range from 0 to 1) and then, also to facilitate visual interpretation, its complementary value was used to derive the images. In this way, the most significant changes (i.e., the smallest similarity estimates) are represented by the brightest pixels.
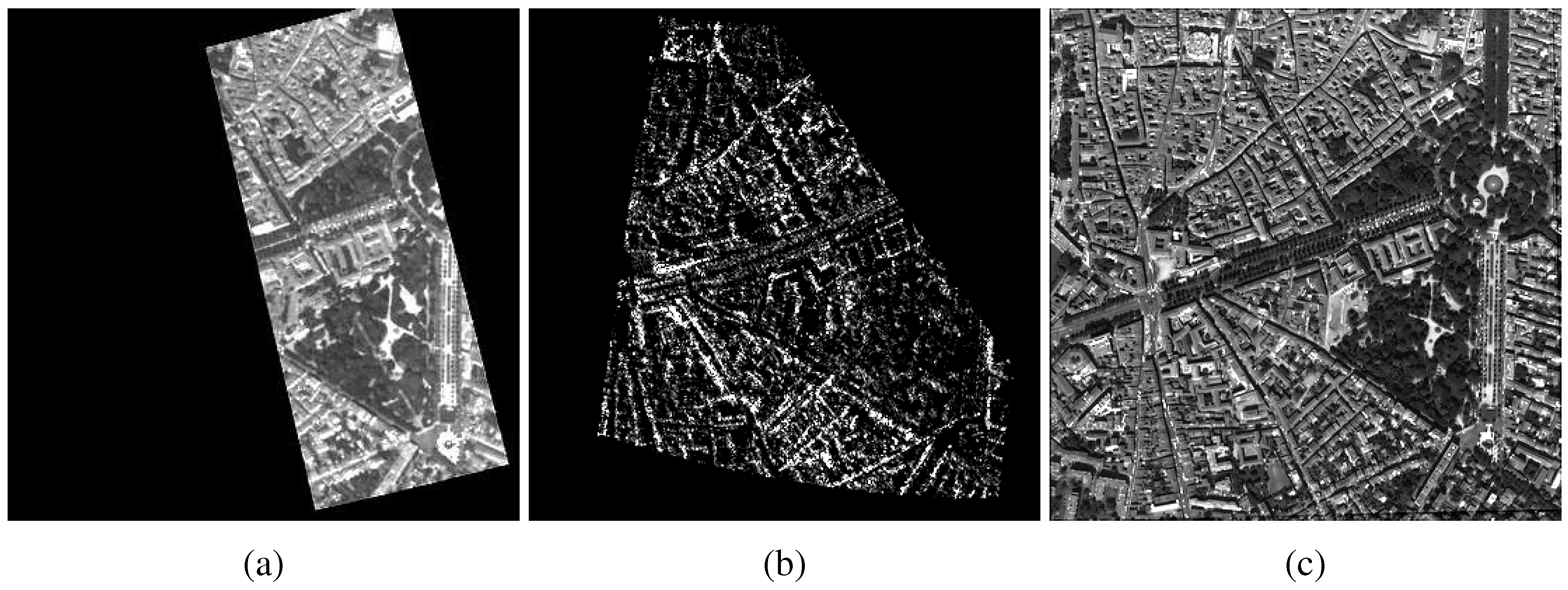
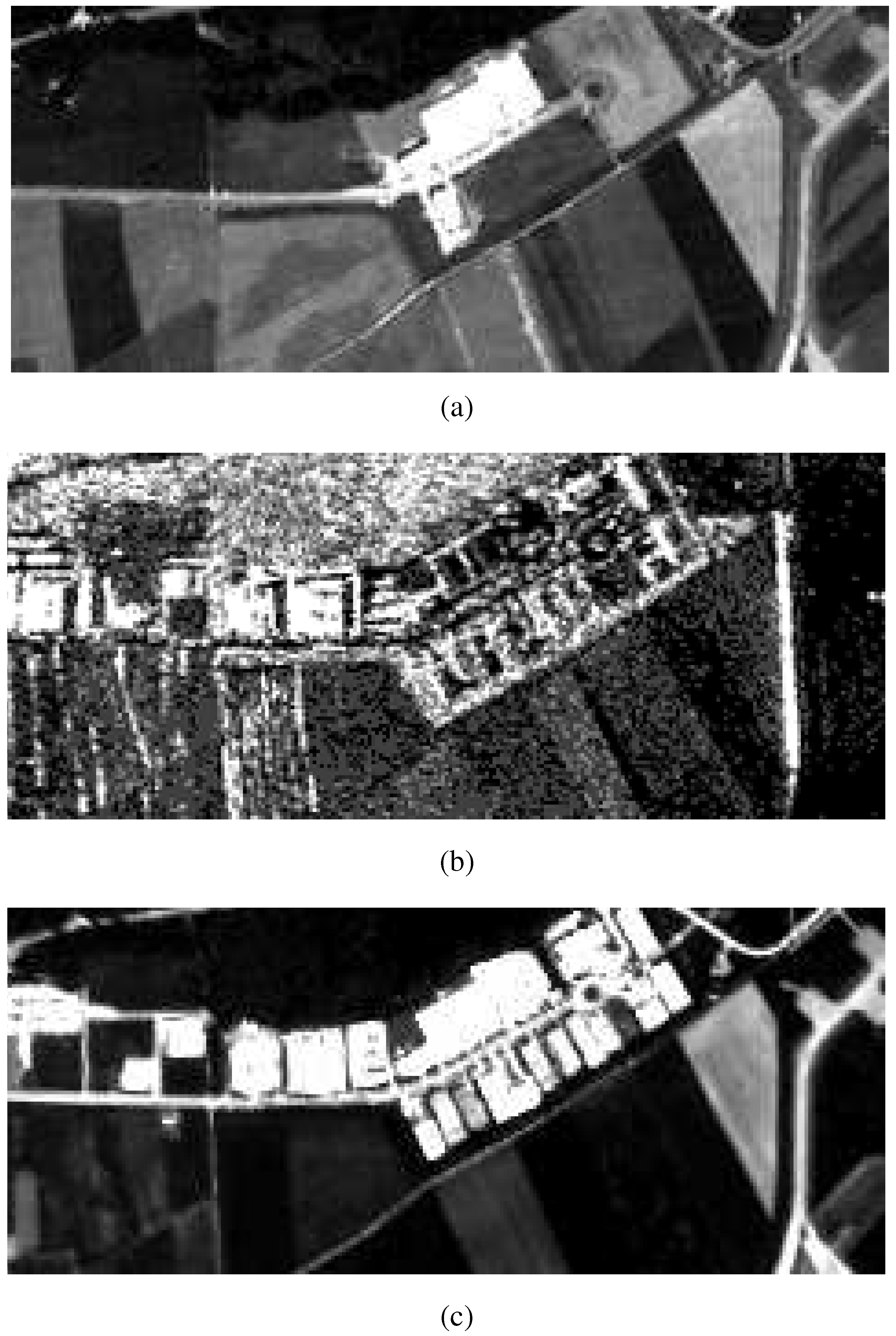
5. Toulouse Test Site
5.1. Scene and Data Processing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| sensor | PELICAN | RAMSES | PELICAN |
| data type | optical - XS blue | SAR - X-band | optical - XS blue |
| (push-broom mode) | |||
| resolution | 2.4 m | 0.93 m × 0.98 m | 2.8 m |
| (gr. range × azimuth) | |||
| date | 09/05/98 | 22/07/04 | 17/09/04 |
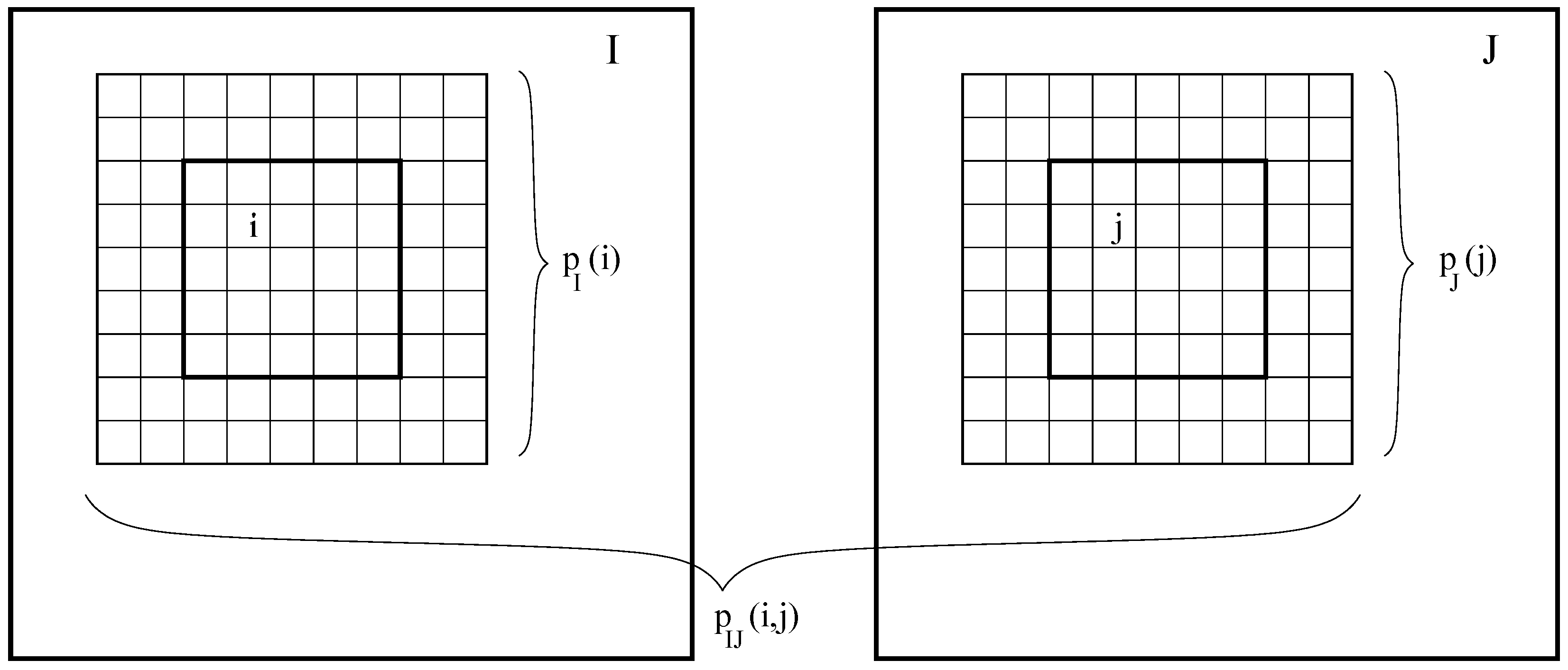
- Case a used a -pixel estimation window to determine the histograms and then calculate the measures by the pixels of that window;
- Case b used a larger window ( pixels) to determine the histograms and the pixel value probabilities but then evaluate the similarity using only the pixels of a smaller area (again of pixels). Referring again to Figure 1, in this case, one considers the outer and inner square windows for the two calculations.
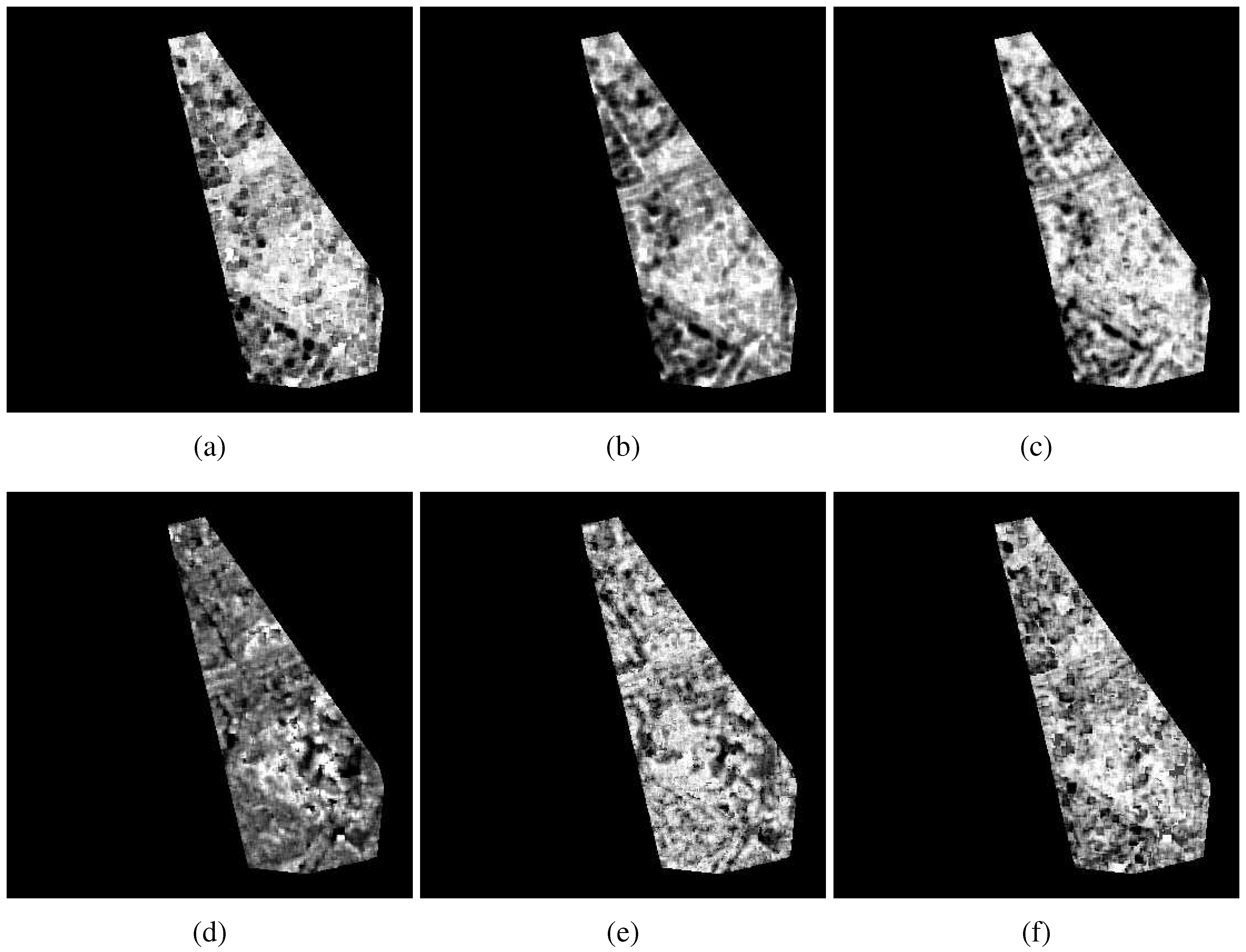
5.2. Result Analysis
5.2.1. Case a


5.2.2. Case b


6. Oberpfaffenhofen Test Site
6.1. Scene and Data Processing
| data type | optical - panchromatic | SAR - X-band | optical - HS blue |
| resolution | 2 m | 2.5 m × 1.5 m | 4 m |
| (gr. range × azimuth) | |||
| year | 1990 | 1993 | 2004 |

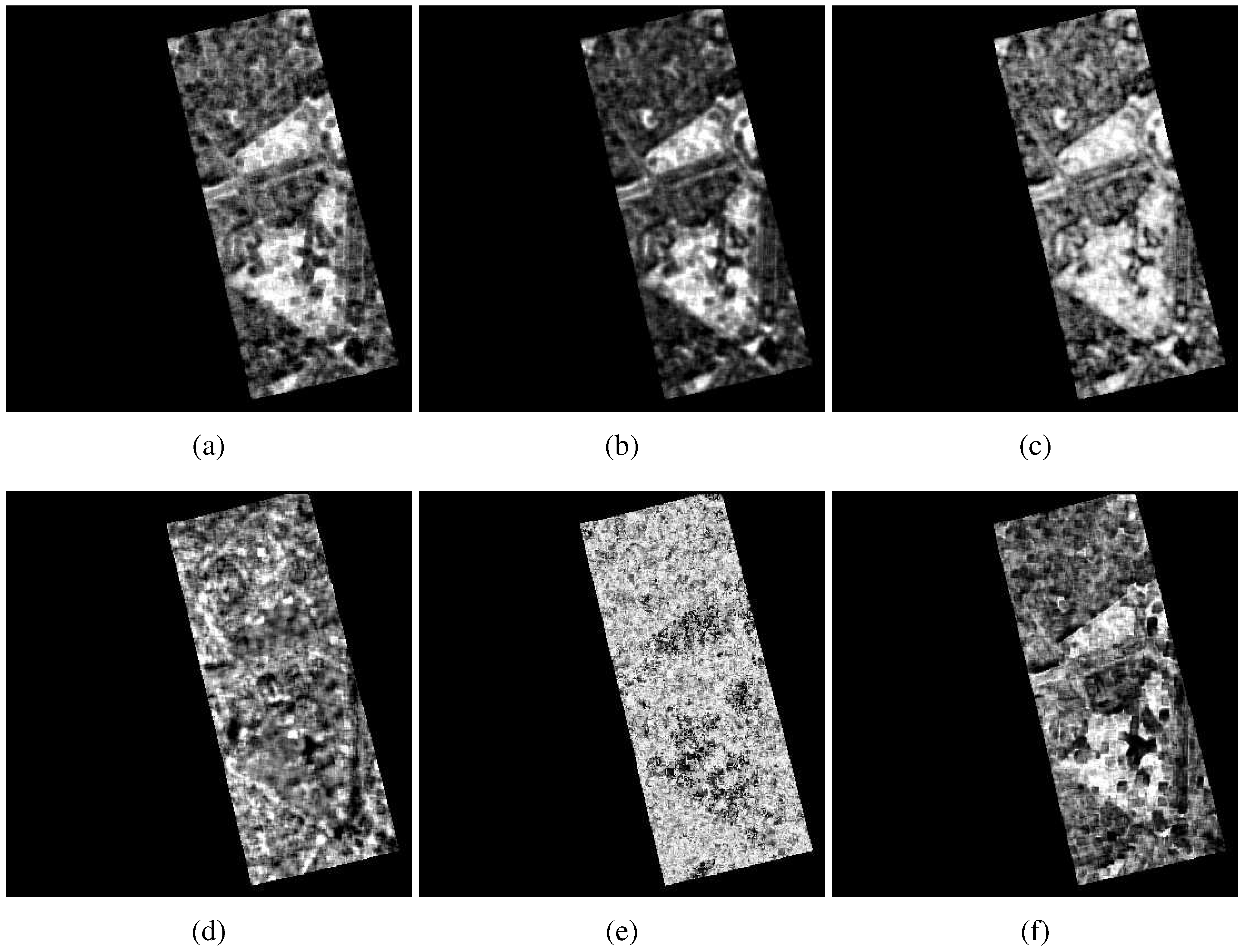
6.2. Result Analysis


| dist. to | mutual | CRA | Woods | rob. Woods | corr. | |
| indep. | info. | criterion | criterion | ratio | ||
| threshold | 0.902 | 0.820 | 0.980 | 0.143 | 0.312 | 0.073 |
| changes (%) | 67.3 | 68.9 | 93.7 | 17.0 | 56.7 | 56.5 |
| false alarms (%) | 57.4 | 66.4 | 64.8 | 83.2 | 26.7 | 90.6 |
| dist. to | mutual | CRA | Woods | rob. Woods | corr. | |
| indep. | info. | criterion | criterion | ratio | ||
| threshold | 0.850 | 0.800 | 0.985 | 0.100 | 0.300 | 0.075 |
| changes (%) | 89.1 | 86.1 | 85.8 | 63.3 | 65.0 | 53.4 |
| false alarms (%) | 69.0 | 72.9 | 57.1 | 93.9 | 31.3 | 90.3 |
| dist. to | mutual | CRA | Woods | rob. Woods | corr. | |
| indep. | info. | criterion | criterion | ratio | ||
| threshold | 0.952 | 0.877 | 0.957 | 0.157 | 0.506 | 0.085 |
| changes (%) | 88.3 | 80.8 | 90.1 | 56.0 | 48.9 | 69.6 |
| false alarms (%) | 21.6 | 0.0 | 8.1 | 0.0 | 55.8 | 11.6 |
| dist. to | mutual | CRA | Woods | rob. Woods | corr. | |
| indep. | info. | criterion | criterion | ratio | ||
| threshold | 0.945 | 0.860 | 0.940 | 0.100 | 0.470 | 0.075 |
| changes (%) | 90.6 | 91.9 | 97.7 | 79.5 | 57.7 | 77.7 |
| false alarms (%) | 25.5 | 0.0 | 11.3 | 13.2 | 60.6 | 13.2 |


7. Summary
Acknowledgements
References
- Chavez, P.S., Jr.; Mackinnon, D.J. Automatic detection of vegetation changes in the southwestern United States using remotely sensed images. J. Photogram. Eng. Remote Sens. 1994, 60, 571–583. [Google Scholar]
- Engeset, R.V.; Kohler, J.; Melvold, K.; Lundén, B. Change detection and monitoring of glacier mass balance and facies using ERS SAR winter images over Svalbard. Int. J. Remote Sens. 2002, 23, 2023–2050. [Google Scholar] [CrossRef]
- Almeida-Filho, R.; Rosenqvist, A.; Shimabukuro, Y.E.; Silva-Gomez, R. Detecting deforestation with multitemporal L-band SAR imagery: a case study in western Brazilian Amazônia. Int. J. Remote Sens. 2007, 28, 1383–1390. [Google Scholar] [CrossRef]
- Cihlar, J.; Pultz, T.J.; Gray, A.L. Change detection with synthetic aperture radar. Int. J. Remote Sens. 1992, 13, 401–414. [Google Scholar] [CrossRef]
- Zhu, L.; Tateishi, R. Fusion of multisensor multitemporal satellite data for land cover mapping. Int. J. Remote Sens. 2006, 27, 903–918. [Google Scholar] [CrossRef]
- Bruzzone, L.; Serpico, S.B. An iterative technique for the detection of land-cover transitions in multi-spectral remote-sensing images. IEEE Trans. Geosci. Remote Sens. 1997, 35, 858–867. [Google Scholar] [CrossRef]
- Hame, T.; Heiler, I.; San Miguel-Ayanz, J. An unsupervised change detection and recognition system for forestry. Int. J. Remote Sens. 1998, 19, 1079–1099. [Google Scholar] [CrossRef]
- Sader, S.A.; Hayes, D.J.; Hepinstall, J.A.; Coan, M.; Soza, C. Forest change monitoring of a remote biosphere reserve. Int. J. Remote Sens. 2001, 22, 1937–1950. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Batistella, M.; Moran, E. Land-cover binary change detection methods for use in the moist tropical region of the Amazon: a comparative study. Int. J. Remote Sens. 2005, 26, 101–114. [Google Scholar] [CrossRef]
- Grover, K.; Quegan, S.; da Costa Freitas, C. Quantitative estimation of tropical forest cover by SAR. IEEE Trans. Geosci. Remote Sens. 1999, 37, 479–490. [Google Scholar] [CrossRef]
- Stramondo, S.; Bignami, C.; Chini, M.; Pierdicca, N.; Tertulliani, A. Satellite radar and optical remote sensing for earthquake damage detection: results from different case studies. IEEE Trans. Geosci. Remote Sens. 2006, 27, 4433–4447. [Google Scholar] [CrossRef]
- Merril, K.R.; Jiajun, L. A comparison of four algorithms for change detection in an urban environment. Remote Sens. Environ. 1998, 63, 95–100. [Google Scholar]
- Zhang, Y. Detection of urban housing development by fusing multisensor satellite data and performing spatial feature post-classification. Int. J. Remote Sens. 2001, 22, 3339–3355. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, J.; Peng, X.; Gong, P.; Shi, P. Urban built-up land change detection with road density and spectral information from multi-temporal Landsat TM data. Int. J. Remote Sens. 2002, 23, 3057–3078. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondízio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2401. [Google Scholar] [CrossRef]
- Maes, F.; Collignon, A.; Vandermeulen, D.; Marchai, G.; Suetens, P. Multimodality image registration by maximization of mutual information. IEEE Trans. Med. Imaging 1997, 16, 187–198. [Google Scholar] [CrossRef] [PubMed]
- Nikou, C.; Heitz, F.; Armspach, J-P.; Namer, I-J. Mesures de similarité robustes pour le recalage d’images médicales volumiques multimodales, (in French). Traitement du Signal 1999, 16, 255–272. [Google Scholar]
- Sarrut, D.; Miguet, S. Similarity measures for image registration. In Proc. European Workshop on Content-Based Multimedia Indexing, Toulouse, France, 25–27 October 1999.
- Inglada, J.; Giros, A. On the possibility of automatic multisensor image registration. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2104–2120. [Google Scholar] [CrossRef]
- Brown, L.G. A survey of image registration techniques. ACM Comput.Surv. 1992, 24, 325–376. [Google Scholar] [CrossRef]
- Inglada, J. Similarity measures for multisensor remote sensing images. In Proc. IGARSS, Toronto, Canada, 24–28 June 2002.
- Inglada, J. Change detection on SAR images by using a parametric estimation of the Kullback-Leibler divergence. In Proc. IGARSS, Toulouse, France, 21–25 July 2003.
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423, 623–656. [Google Scholar] [CrossRef]
- Woods, R.P.; Mazziota, J.C.; Cherry, S.R. MRI-PET registration with automated algorithm. J. Comput. Assist. Tomogr. 1993, 17, 536–546. [Google Scholar] [CrossRef] [PubMed]
- Sawhney, H.S.; Ayer, S.; Gorkani, M. Model-based 2D&3D dominant motion estimation for mosaicing and video representation. In Proc. ICCV, Cambridge, MA, USA, 20–23 June 1995.
- Townshend, J.; Justice, C.; Gurney, C.; McManus, J. The impact of misregistration on change detection. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1054–1060. [Google Scholar] [CrossRef]
- Alberga, V.; Idrissa, M.; Lacroix, V.; Inglada, J. Comparison of similarity measures of multi-sensor images for change detection applications. In Proc. IGARSS, Barcelona, Spain, 23–27 July 2007.
- Wegmüller, U.; Werner, C. Retrieval of vegetation parameters with SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1997, 35, 18–24. [Google Scholar] [CrossRef]
- Strozzi, T.; Dammert, P.B.G.; Wegmüller, U.; Martinez, J-M.; Askne, J.I.H. Landuse mapping with ERS SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 766–775. [Google Scholar] [CrossRef]
- Alberga, V.; Idrissa, M.; Lacroix, V.; Inglada, J. Performance estimation of similarity measures of multi-sensor images for change detection applications. In Proc. MultiTemp, Leuven, Belgium, 18–20 July 2007.
- D’Addabbo, A.; Satalino, G.; Pasquariello, G.; Blonda, P. Three different unsupervised methods for change detection: an application. In Proc. IGARSS, Anchorage, AK, USA, 20–24 September 2004.
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Alberga, V. Similarity Measures of Remotely Sensed Multi-Sensor Images for Change Detection Applications. Remote Sens. 2009, 1, 122-143. https://doi.org/10.3390/rs1030122
Alberga V. Similarity Measures of Remotely Sensed Multi-Sensor Images for Change Detection Applications. Remote Sensing. 2009; 1(3):122-143. https://doi.org/10.3390/rs1030122
Chicago/Turabian StyleAlberga, Vito. 2009. "Similarity Measures of Remotely Sensed Multi-Sensor Images for Change Detection Applications" Remote Sensing 1, no. 3: 122-143. https://doi.org/10.3390/rs1030122
APA StyleAlberga, V. (2009). Similarity Measures of Remotely Sensed Multi-Sensor Images for Change Detection Applications. Remote Sensing, 1(3), 122-143. https://doi.org/10.3390/rs1030122