1. Introduction
In stationary applications, especially in the case of terrestrial LiDAR systems, direct georeferencing is still in its infancy. Direct georeferencing of mobile mapping systems, on the other hand, has gained wide acceptance in wide range of applications. In its simplest form, a direct georeferencing system is composed of a GPS-aided inertial navigation system mounted rigidly with the mapping sensor. The georeferencing system and the mapping system are both treated as rigid body where the equations for rigid body motion apply. Mobile LiDAR systems are being developed for different applications, terrestrial and marine [
1].
The typical approach for georeferencing LiDAR point clouds from a stationary system is through the use of reflective targets placed at ground control points with known coordinates. The transformation (geo-referencing) parameters between a Scanner Own Coordinate System (SOCS) and a Global Coordinate System (GLCS) are obtained by using the known coordinates of the targets. All other points in the point cloud can then be transformed from the SOCS coordinate system to the GLCS coordinate system using the transformation parameters, hence geo-registering the point cloud in the ground coordinate system.
In addition to the coordinate transformation method described above, there are other methods for georeferencing LiDAR data such as back-sighting, sensor-driven and data-driven approaches, see [
2] for a comparison of these approaches and [
3,
17,
18] for an application of a data-driven approach. However, these methods rely on the identification of control targets in the point cloud and in the project area. Some of the disadvantages associated with these methods are: the need for additional, sometimes cumbersome equipment; extra time required to set up the targets; and precision surveying of target control points. Obtaining control often requires personnel work in the scene of interest. This may not always be possible due to physical obstacles and/or safety concerns, e.g., in glaciers or on top of mountains; see
Section 2 that describes our motivation to such development. One can increase the speed and efficiency of data acquisition georeferencing and circumvent limitations due to the nature of the scanned area by using a direct georeferencing method that doesn’t rely on scanner targets.
Determination of the angular attitude of earth-bound objects using satellites was considered even prior to the launch of the first GPS satellite [
6]. Obtaining attitude information from GPS multi-antenna systems has since proven to be a feasible application [
7]. Most applications of multi-antenna attitude determination are performed using high precision GPS; attitude determination by GPS is often part of an integrated system using both inertial and GPS measurements [
8,
9]. Nevertheless, it has been shown that low-cost systems that provide practical attitude precision are viable [
10,
11,
12], and navigation systems using only GPS for attitude determination have been developed with successful results [
11]. One of the systems described in [
11] uses four GPS antennas to determine azimuth, pitch, and roll, providing an accuracy of approximately 1 mrad (about 0.05 degree) using an antenna baseline distance of 3–5 meters. The two antenna GPS-compass system described in [
13] reports results of 4 mrad precision using two off-the-shelf GPS receivers. A four-antenna GPS attitude determination system, with baselines of 11 and 42 m, has been shown to produce precisions of 0.3, 0.6 and 0.9 mrad for pitch, heading and roll respectively as reported in [
13].
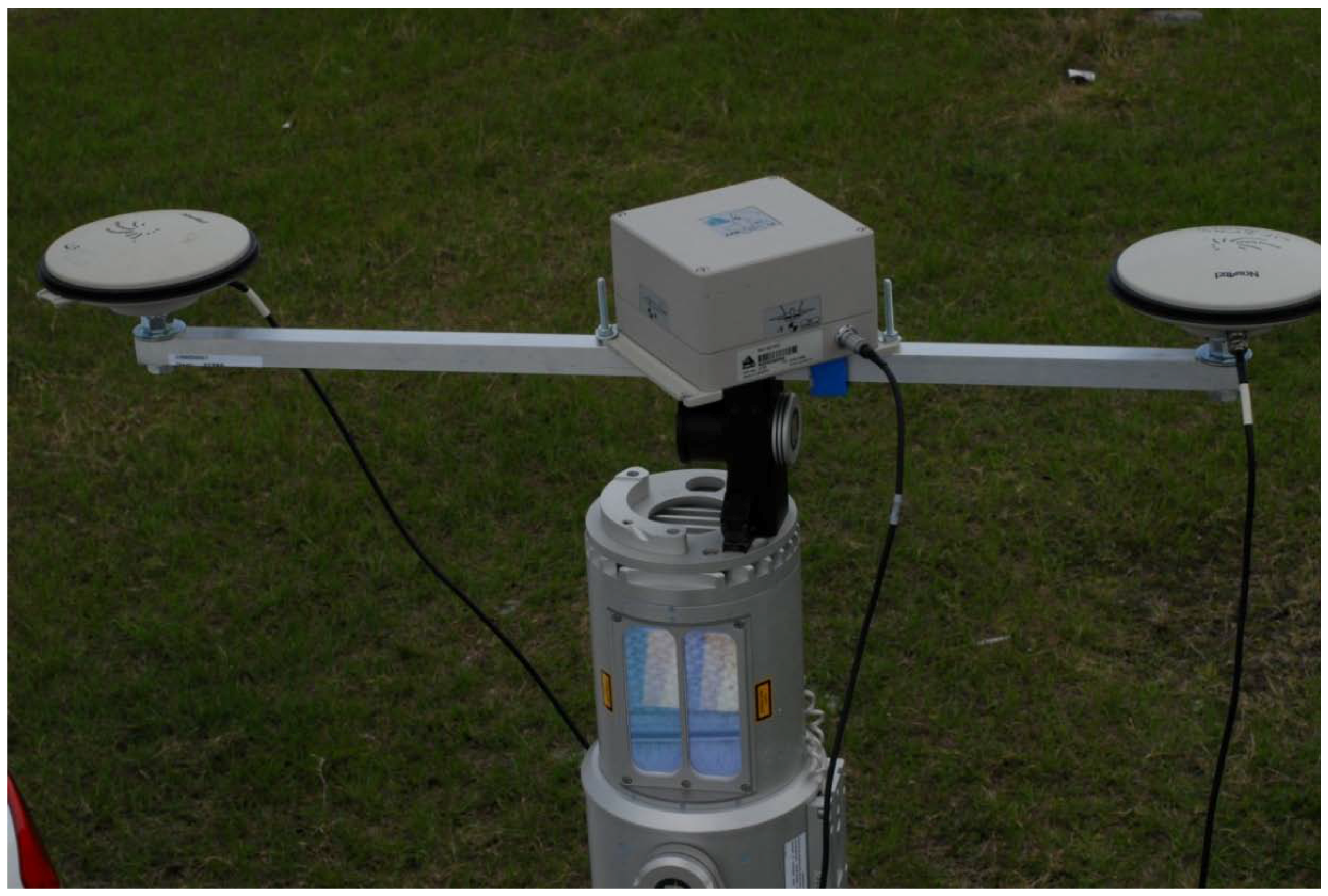
In this paper, we present a direct georeferencing method for terrestrial LiDAR point clouds via a dual antenna attitude determination scheme. To circumvent the singularity of the dual-antenna system to recover the three orientation angles, we allow the dual-antenna vector to rotate about the LiDAR standing axis to form a multi-vector plane. The formation of the plane allows for the solution of the fundamental rotation problem, where the dual-antenna vectors are defined in the GLCS and in the SOCS at every stop of the system; finding the rotation matrix between SOCS and GLCS defines the rotation matrix. Through simulation and real-world experimentation, we show that our method can provide solutions with a useful level of precision for the three orientation angles.
2. Motivation
The authors were inspired by work done by Distinguished Professor Marte S. Guitierrez of the Colorado School of Mines in the Philippines in 2006 [
14].
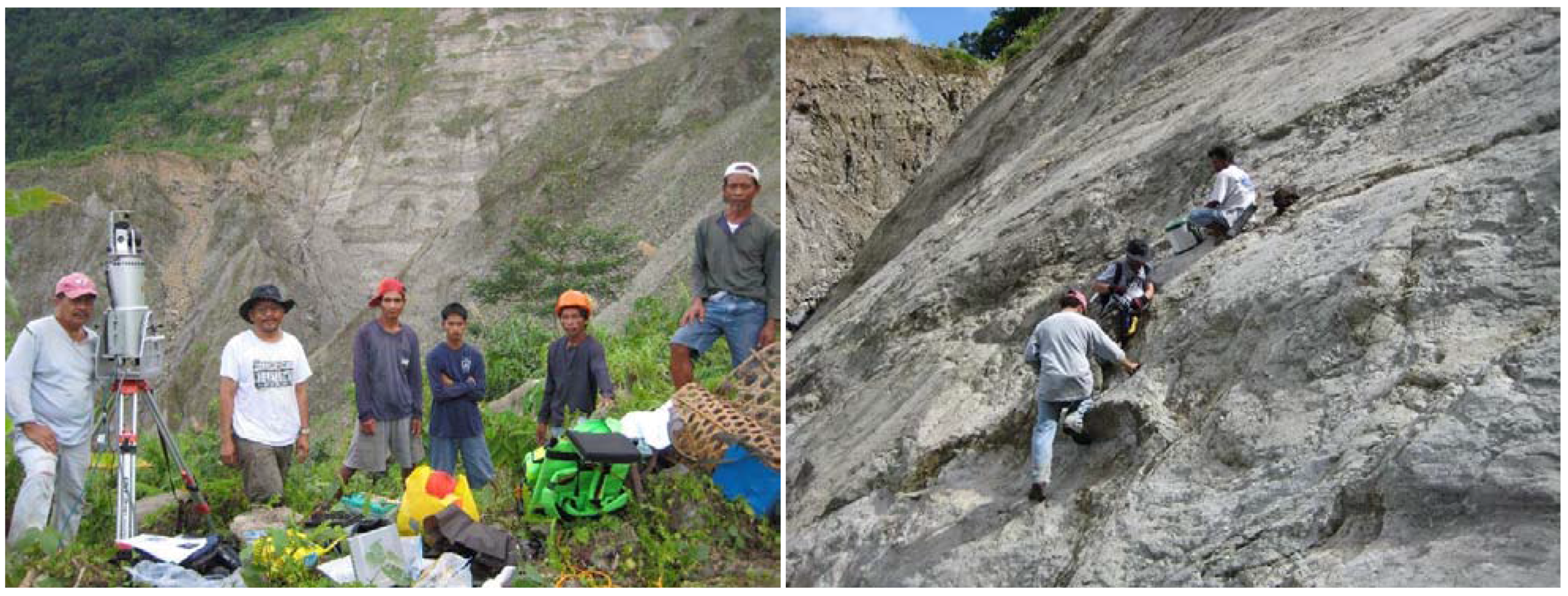
Figure 1 shows a survey crew installing reflex targets manually on the main slip surface to indirectly geo-reference the LiDAR system. According to [
15], “The initial survey required two days as it took about four hours to hike and climb the slide surface, and another four hours to return.” The authors of this paper, in collaboration with Riegl USA, are developing a method to make such georeferencing safer and more efficient.
Figure 1.
LiDAR survey crew (left) and manual survey crew installing the reflex targets on the slip surface of the February 17, 2006 landslide in Guinsaugon, Southern Leyte, Philippines, photos courtesy Professor Guitierrez and Riegl USA.
Figure 1.
LiDAR survey crew (left) and manual survey crew installing the reflex targets on the slip surface of the February 17, 2006 landslide in Guinsaugon, Southern Leyte, Philippines, photos courtesy Professor Guitierrez and Riegl USA.
3. Methodology
In this section, we describe the mathematical model and its linearization technique used in the development of the Dual-Antennae System (DAS). Direct Georeferencing is defined as the computation of the transformation parameters between an arbitrary input coordinate system (represented in this application by the scanner own coordinate system) and a global or mapping coordinate system. The mathematical model used is fundamentally based on the 3D conformal transformation between two orthogonal systems; see [
15] for more details while some equations are repeated here for convenience. The 3D conformal transformation from arbitrary scanner coordinates to global coordinates has the form [
16]:
where:
is the position vector of a point in the ground system,
s is a scaling factor,
is the rotation matrix from the scanner coordinate system to the ground coordinate system,
is the position vector of the point in the Scanner coordinate system, and,
is the translation matrix from the scanner coordinate system to the ground coordinate system.
With redundant observations, a least-squares solution can be used to compute s, , and . The traditional approach uses scanned points with known coordinates in the scanner system and in the global system for the two vectors XS and XG respectively. In the proposed method, however, the coordinates (and ultimately the differential vectors) of the phase centers of scanner-mounted GPS antennae are used instead, as will be described later.
The number of angular stops of the antenna-mounted apparatus has to be larger than three to achieve a solution. In order to exploit the higher precision of differential GPS, a two antenna configuration is used. The formulation of this case is as follows: at each stop, two equations for the two antennae are formed as in Equation 2:
Subtracting both antennae positions in Equation 2 and assuming a unit scale between the scanner coordinate system and the global coordinate system yields:
By assuming small angle rotations in the rotation matrix R and re-arranging, we can rewrite Equation 3 as follows:
where
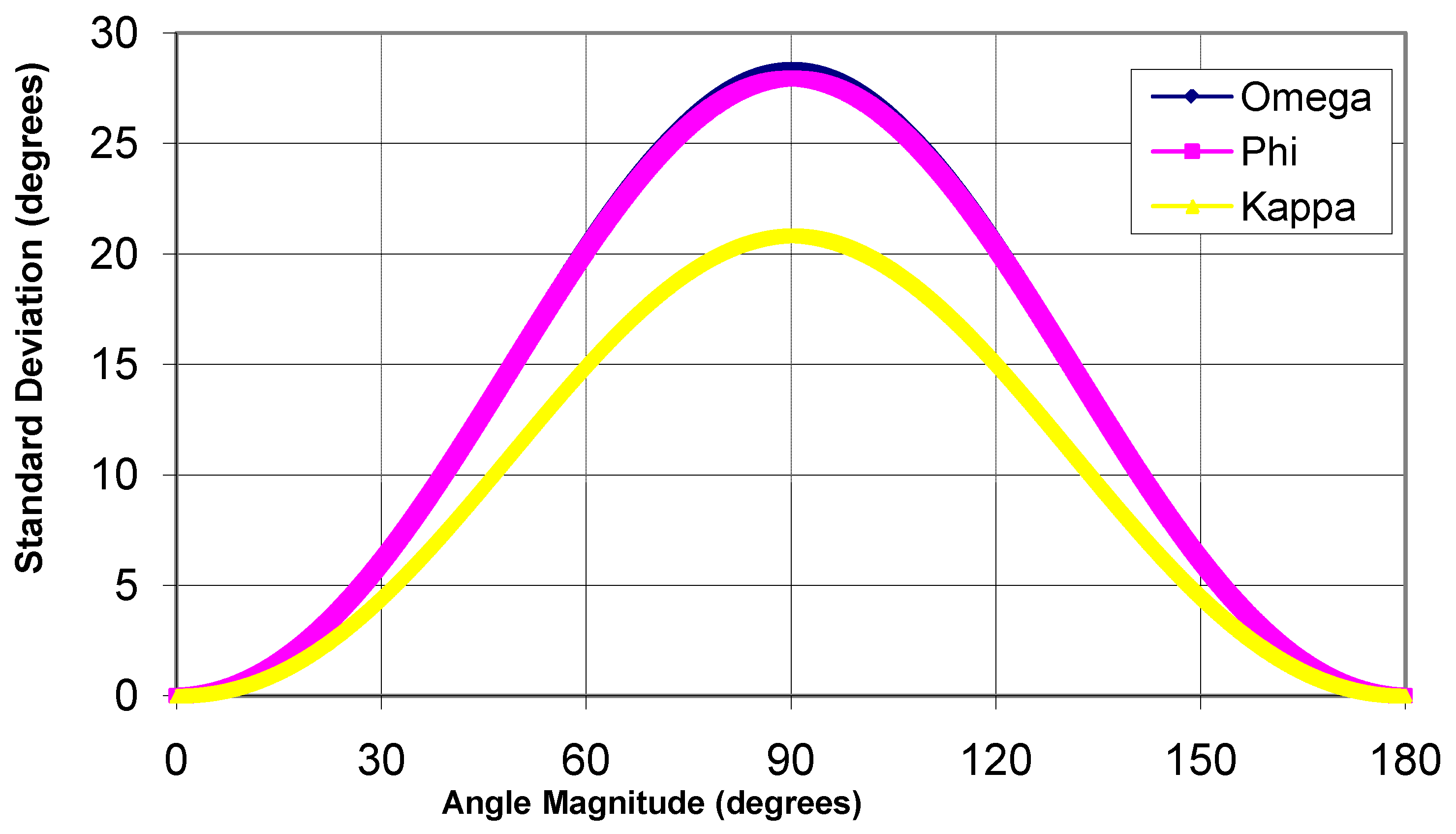
ω,
ϕ,
κ are the three Euler rotations about the
x,
y, and
z axes of the two coordinate systems, respectively; the small angle rotation assumption is practically possible by leveling and initializing the LiDAR sensor in the north direction.
By applying the identity of skew symmetric matrices and their vector equivalents found in Equation 4 [
17], it becomes
Equation 5 is linear in the rotation vector (ω, ϕ, κ)T. Knowing the measured vectors of the dual-antenna system and , in the scanner and global coordinate systems, respectively, the solution of the angular values ω, ϕ, and κ can be found using least squares.
Without losing generality, it can also be shown that the small-angle condition above is not necessary to reach Equation 5 from Equation 3. We will proof that through decomposing the rotation matrix into two matrices, one known at initial approximate rotations
and another one with unknown small rotations to correct the initial rotations,
. In this case, Equation 3 can be rewritten as:
where
is defined as in Equation 6 but for small correction angles (
dω,
dϕ,
dκ)
T. Using the development as above, Equation 6 can be linearized for the small angle corrections as follows:
Where the full rotation angles can be recovered after solving Equation 7, as follows:
Equations 5 and 8 are both linear in the unknown parameter vector (
ω,
ϕ,
κ), but include observations on both sides of the observation equation. A proper rigorous approach to solving this system of equations requires the general least squares formulation [
18].
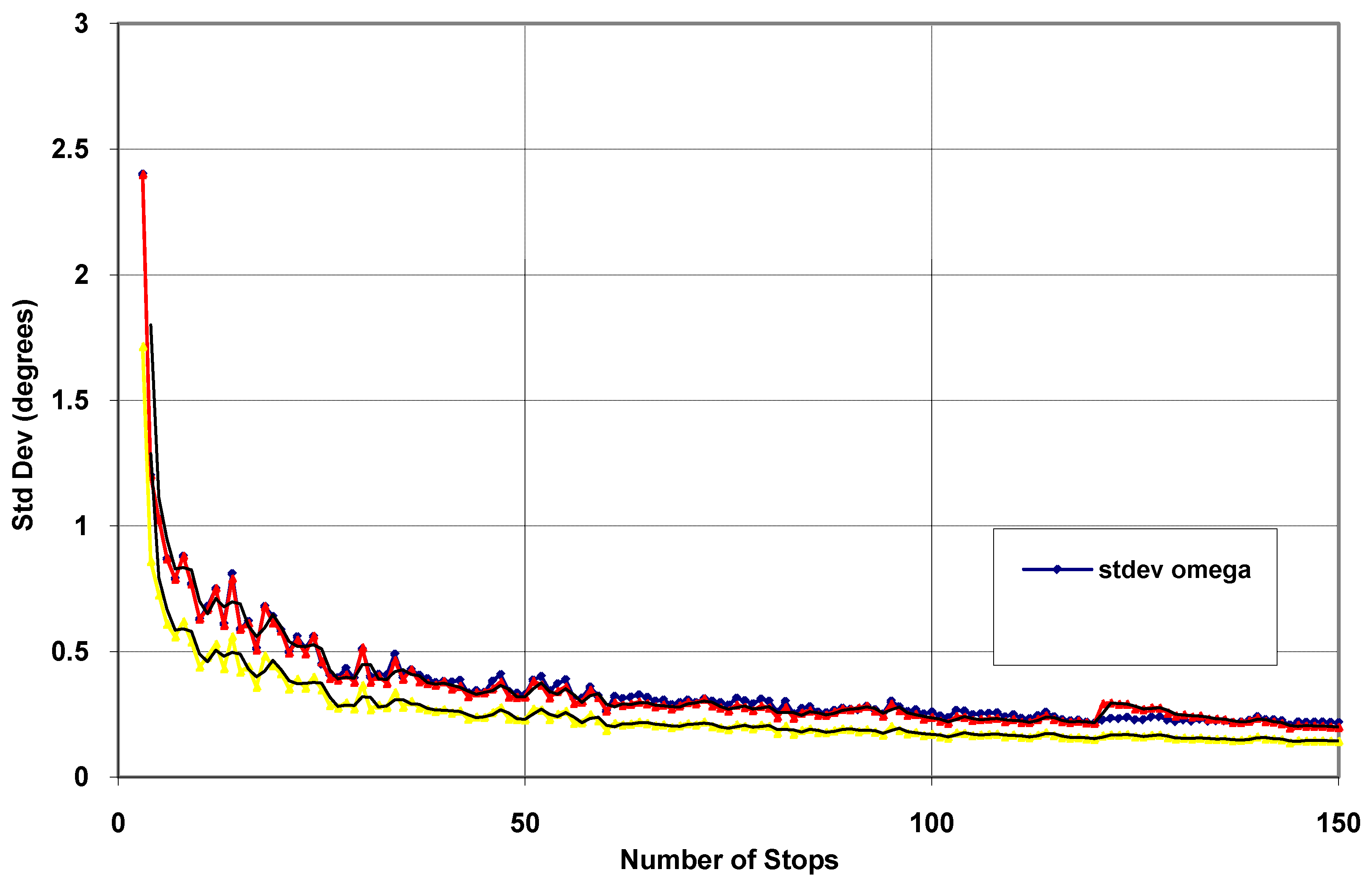
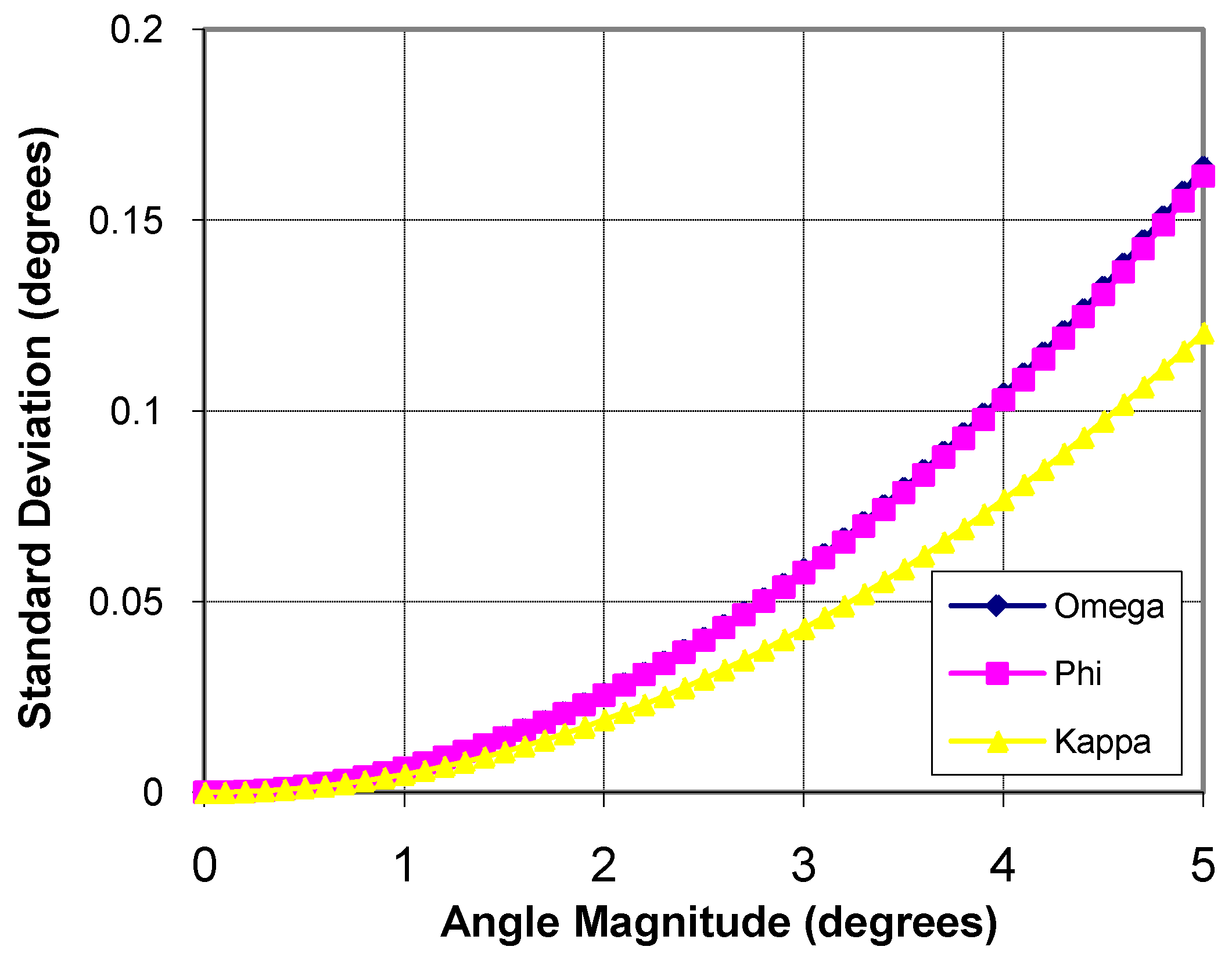
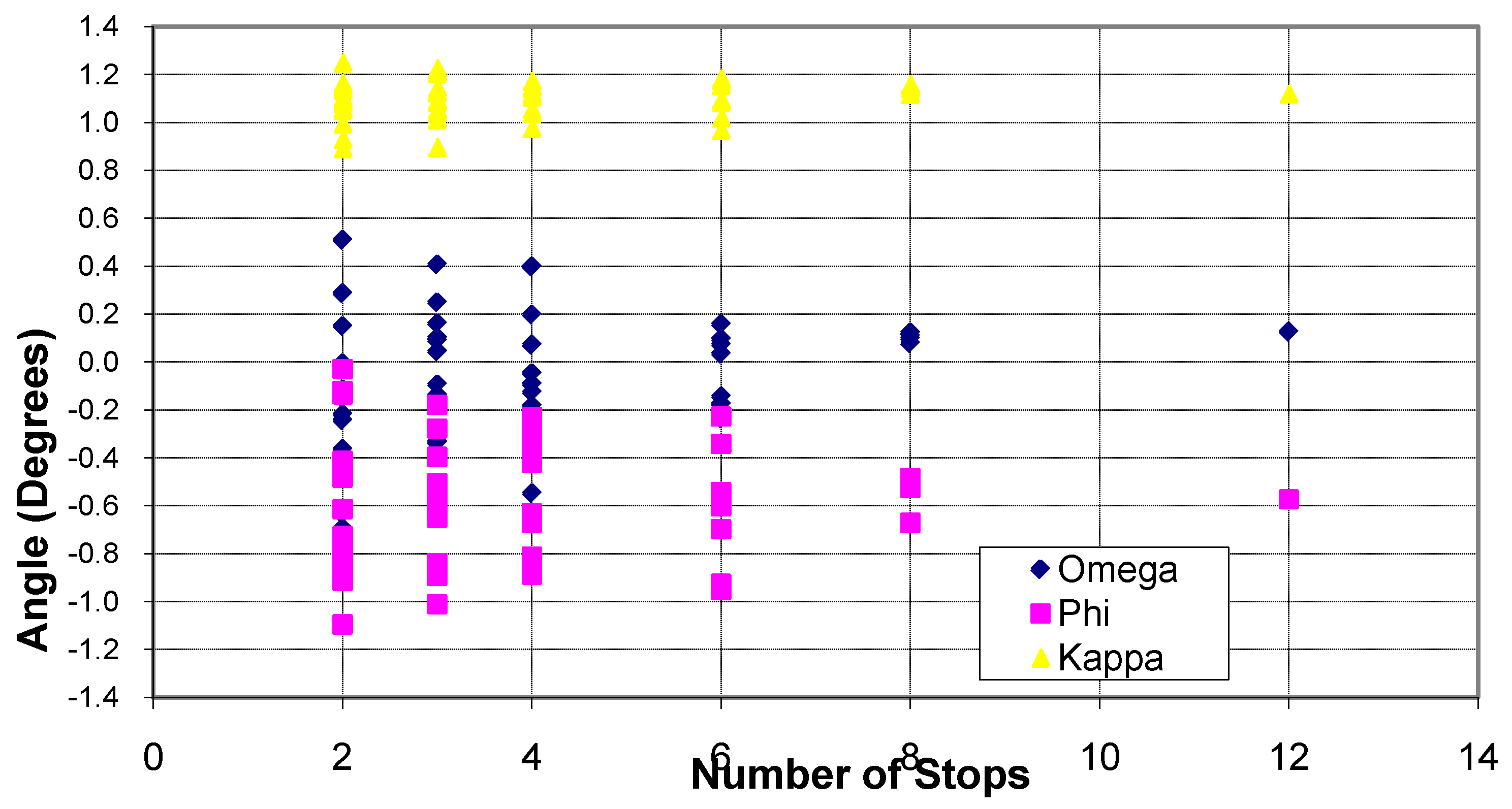
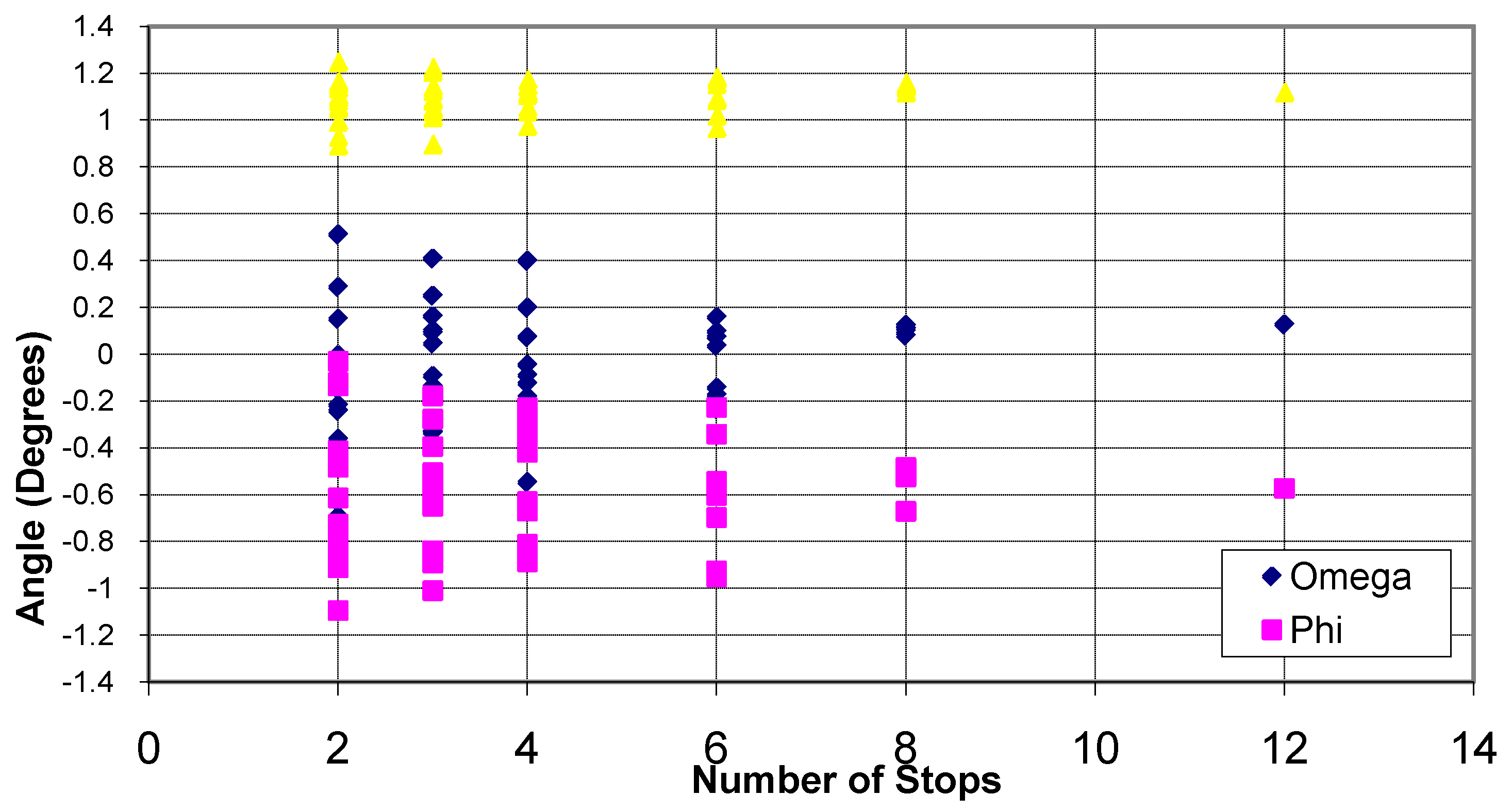
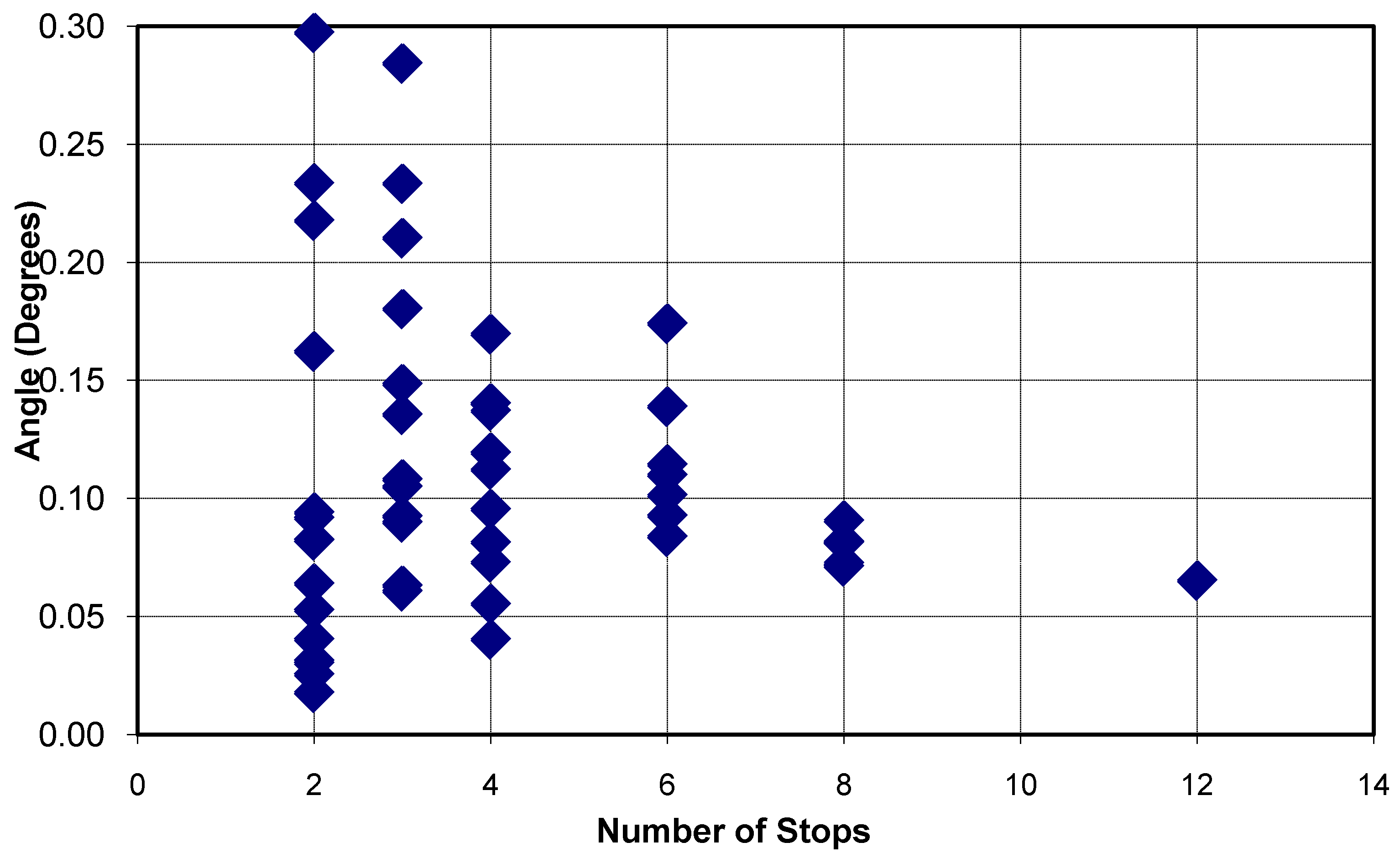
It should be clear in the reader's mind that the solution we achieve through this algorithm is not equivalent to the epoch-by-epoch solution one achieves from mere computation of orientation angles of the GPS vector. Besides, the rotation of the GPS vector of this algorithm enables overcoming the rank deficiency of the 2D system to calculate 3D orientation angles. The solution we achieve in this algorithm improves the single observation precision by a factor of square root of the number of stops as we will show in the experimental results.
6. Summary and Conclusions
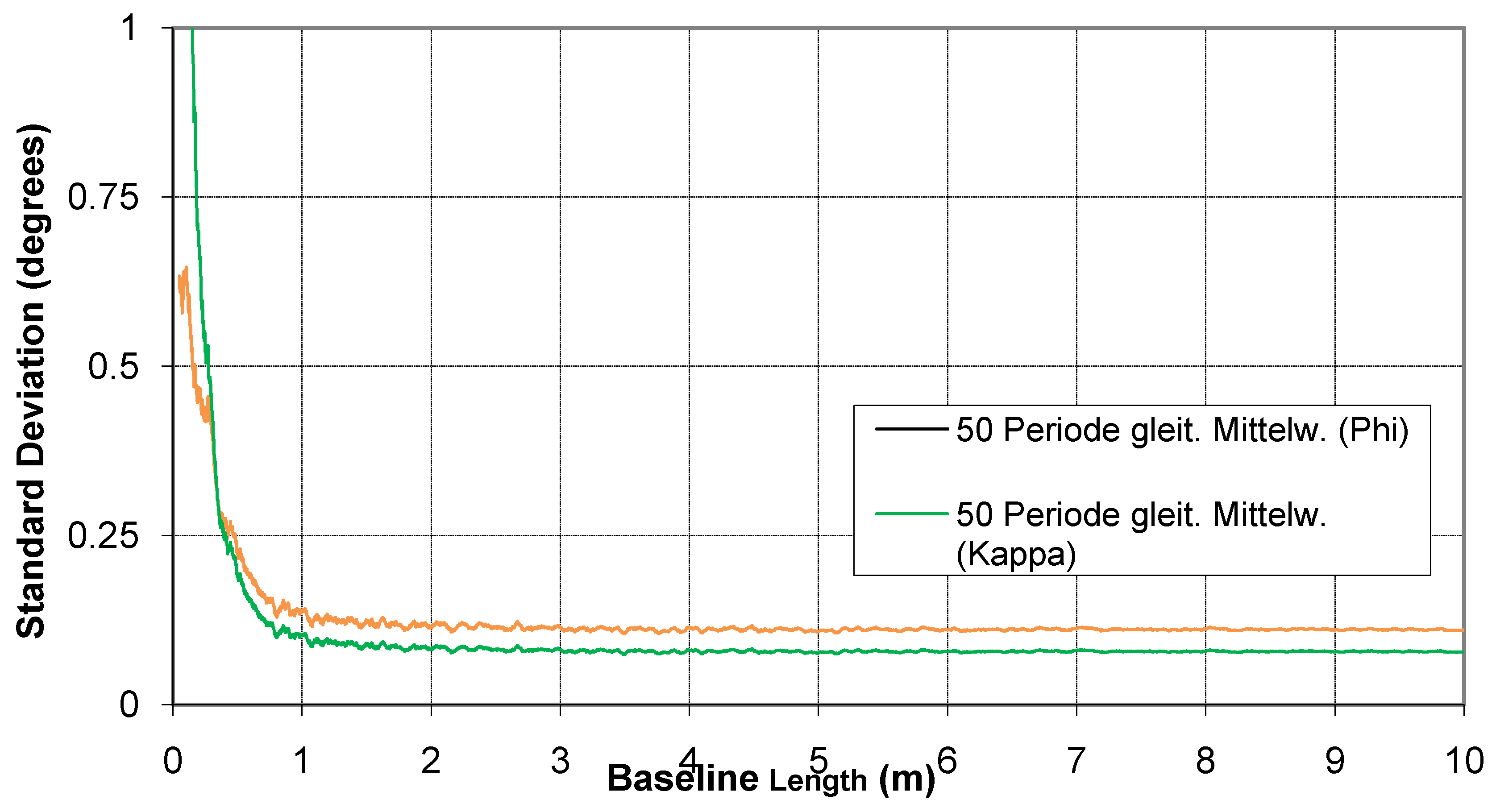
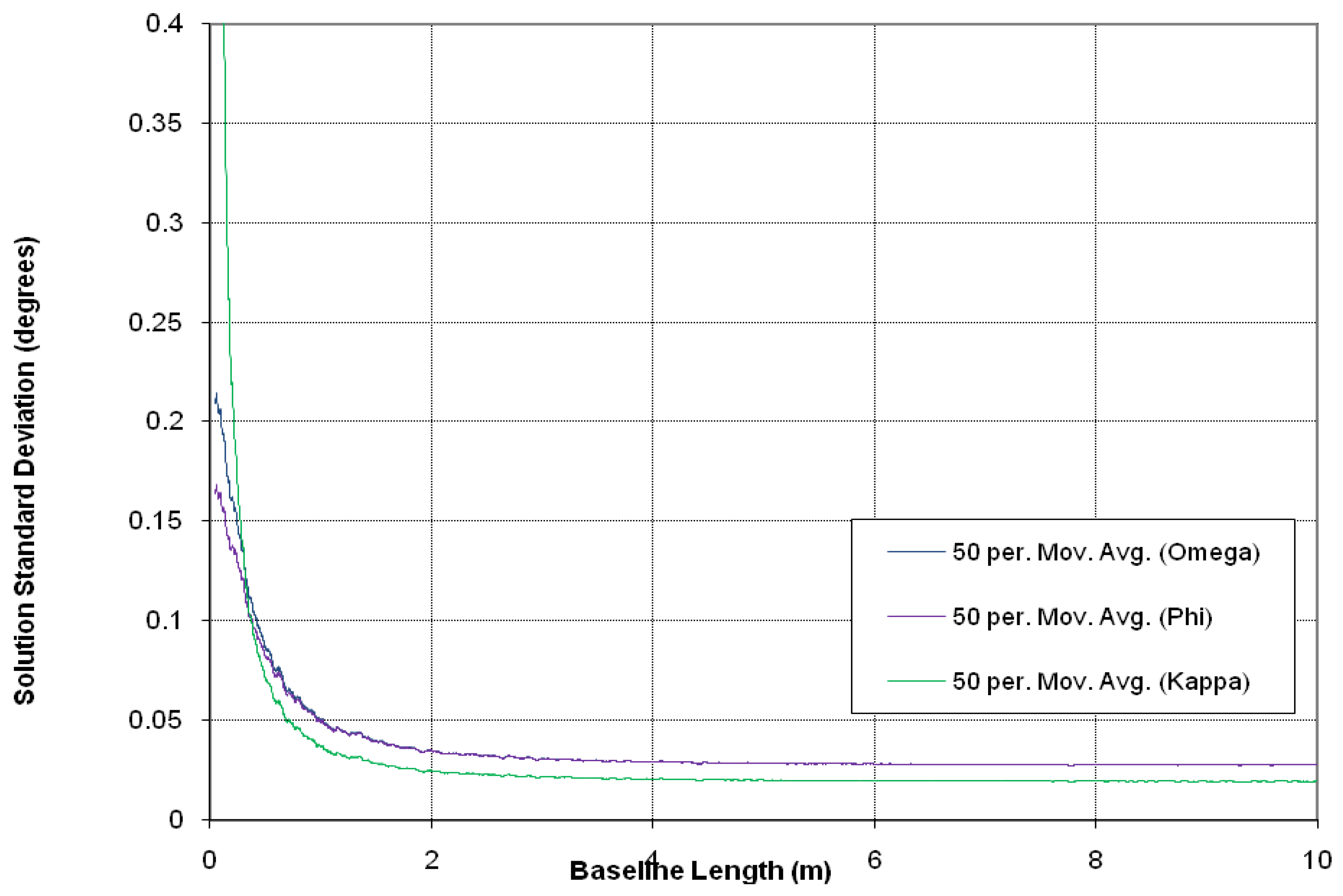
Current techniques for georeferencing stationary LiDAR data involve the direct measurement of objects in the point cloud. The collection of external control can be laborious and in some cases impossible due to physical, safety, and other limitations. We have presented an autonomous way of determining the orientation parameters for transforming the point clouds from the Scanner Own Coordinate System to a Global Coordinate System. By using a dual-antenna apparatus mounted on a moving scanner head, we have shown that orientation angle precision of about 0.05 degrees (~1 mrad) can be achieved for the three rotation angles by using a feasible number of angular stops of the scanner head. This is approximately one half of the accuracy achieved with the conventional technique. We presented the theoretical development of a small angle rotation case and supplanted it with the general case, without losing generality. The length of the apparatus bar did not seem to have affected the attained accuracy substantially leading to the conclusion that a reasonable bar length will suffice in most applications.
The proposed apparatus and algorithm are simple and easy to implement. Currently, tests indicate that at small angles the linear (proposed) and nonlinear solution differences are minimal. Also, solving the model using the general least-squares technique does not improve the accuracy significantly. We are planning more rigorous tests of the system. We will include multiple setups and data from a camera to increase the redundancy and the internal consistency with the conventional technique. This work paves the way for augmentations of the presented dual antenna method with other techniques including Kalman filtering. We also plan to use measurements from the scanner’s horizontal rotation controller as updates to the Kalman filter.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}