Wetland Mapping Using SAR Data from the Sentinel-1A and TanDEM-X Missions: A Comparative Study in the Biebrza Floodplain (Poland)


Abstract
:
1. Introduction
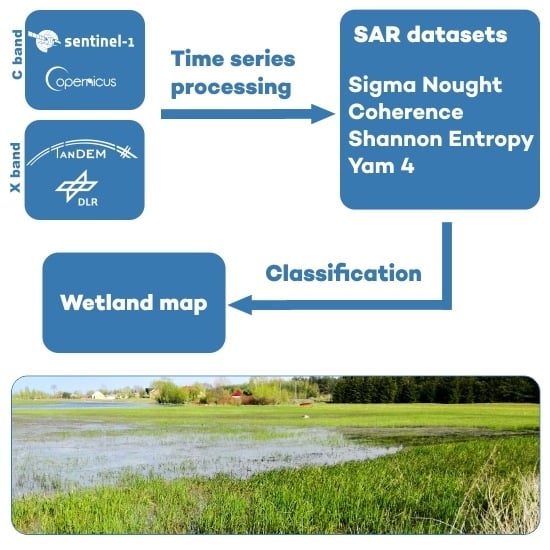
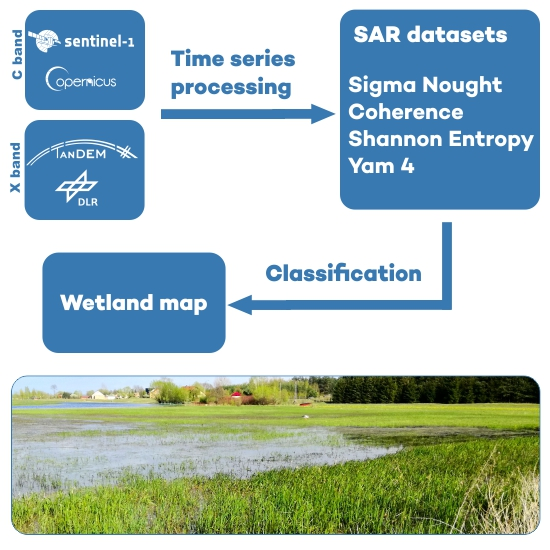
- Mapping wetland with only the C-band S1A, based on the multi-temporal series of SAR images with coarser geometric resolution and fixed polarizations (VV-VH).
- Mapping wetland with experimental fully polarimetric quad-pol X-band TSX/TDX data with higher geometric resolution.
- Compare the wetland mapping using the dual polarization TSX/TDX subsets; that is, HH-HV, HH-VV, and VV-VH. These subsets represent the standard products that could be acquired by an operational X-band SAR sensor outside of special observation campaigns.
- Compare wetland mapping using S1A and TSX/TDX data based on the same polarization (VV-VH) and covering the same observation period—enhancing the differences in geometric resolution and its effect on classification accuracy.
- Study the suitability of the Shannon Entropy as a polarimetric descriptor of wetland land cover, starting from dual-pol and quad-pol data.
- Assess the contribution of interferometric coherence as an additional layer for land cover classification over wetland.
2. Materials and Methods
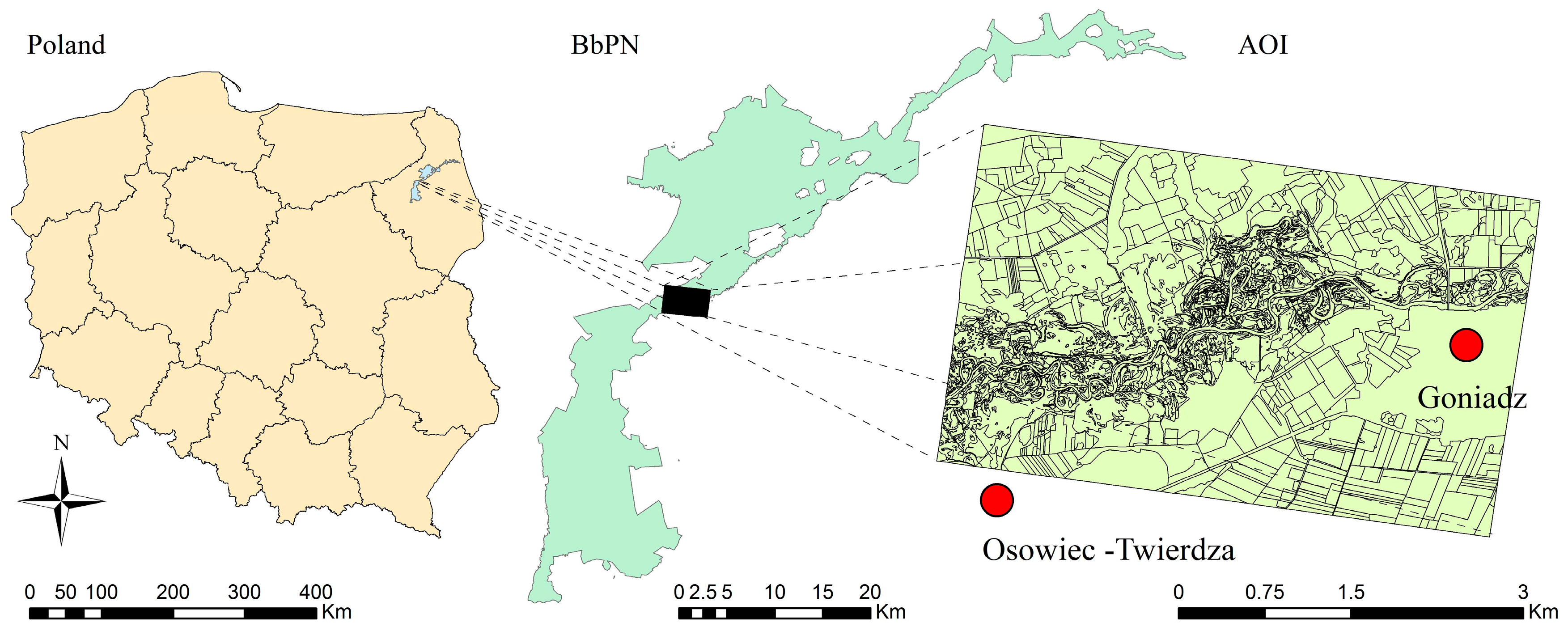
2.1. Description of the Study Area and the Available Ground Truth
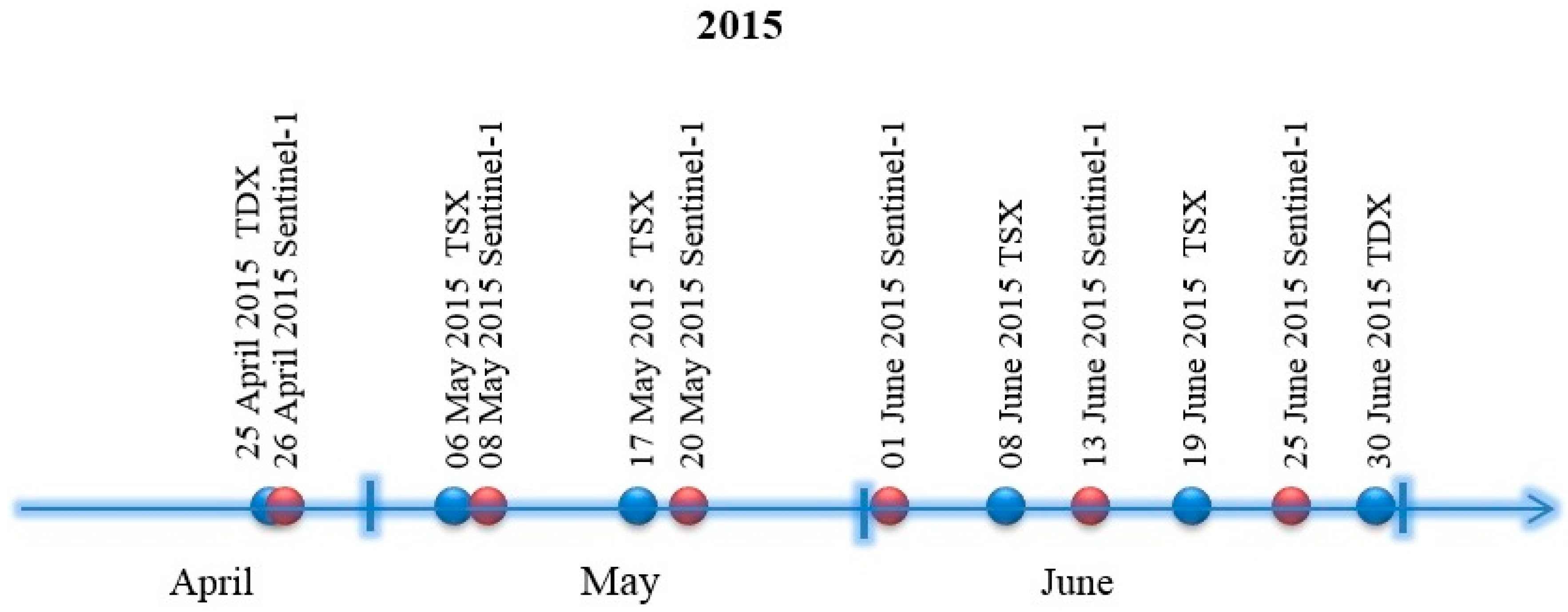
2.2. Sentinel-1A and TSX/TDX Datasets
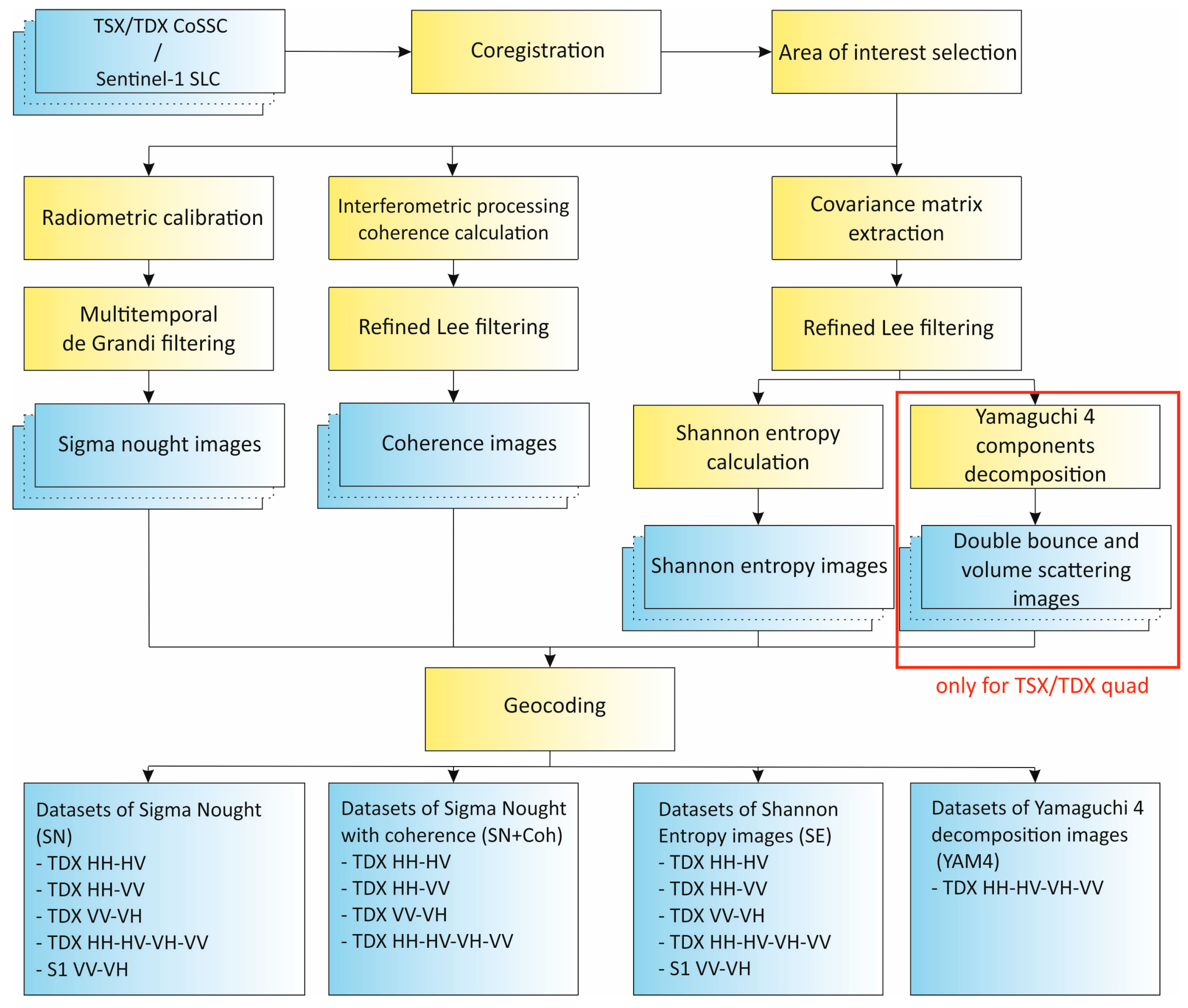
2.3. Image Pre-Processing
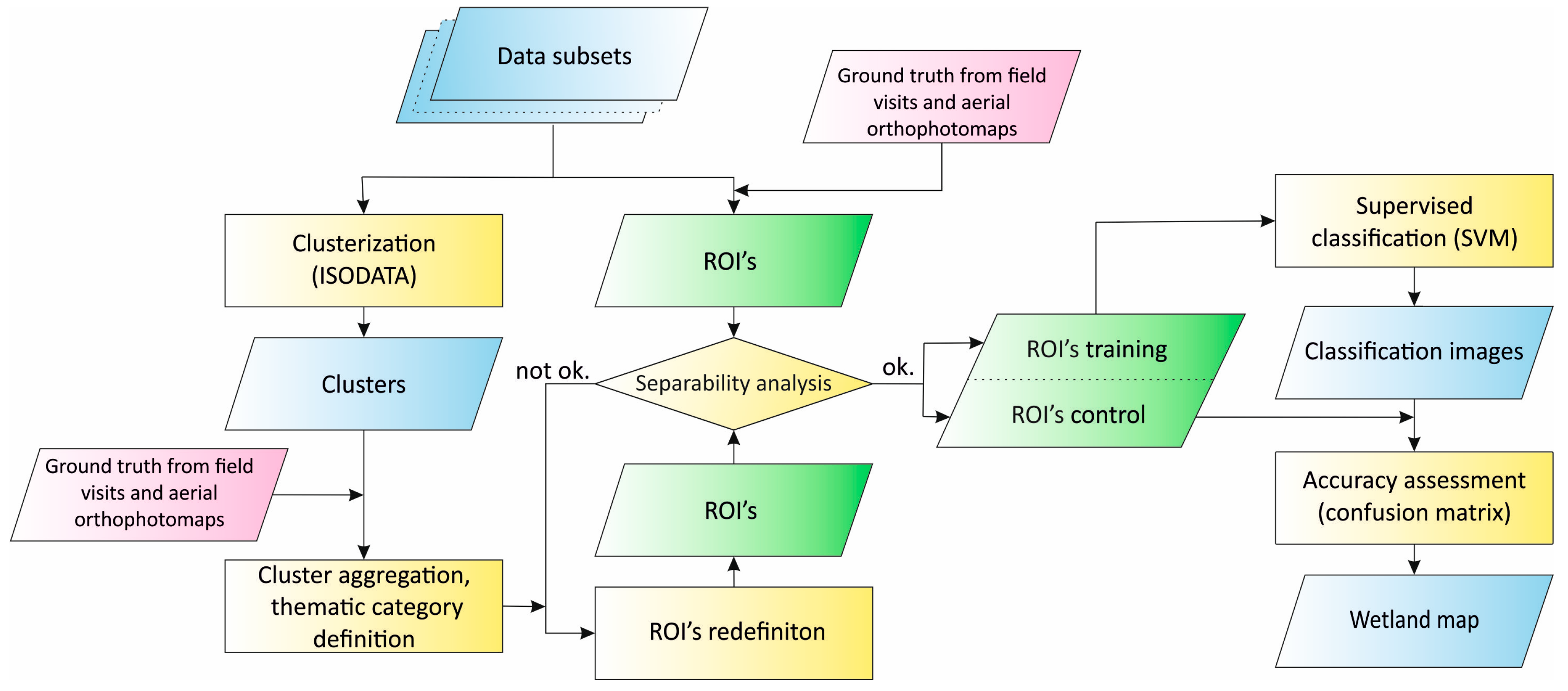
2.4. Multi-Temporal Image Classification
3. Results and Discussion
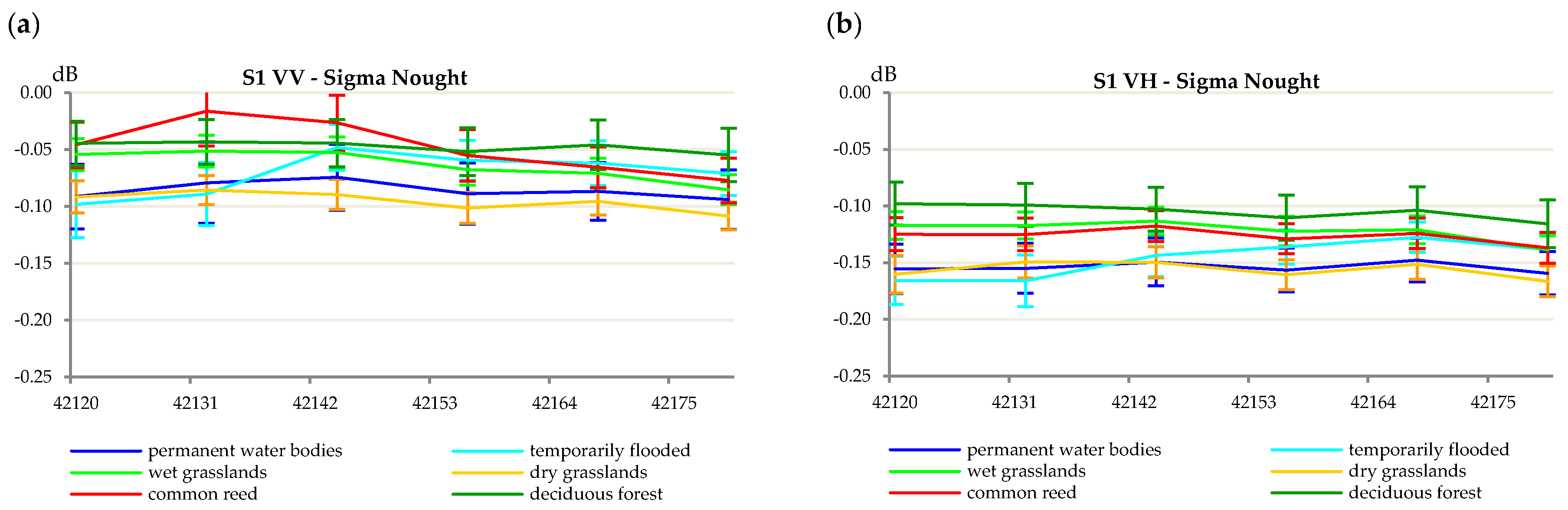
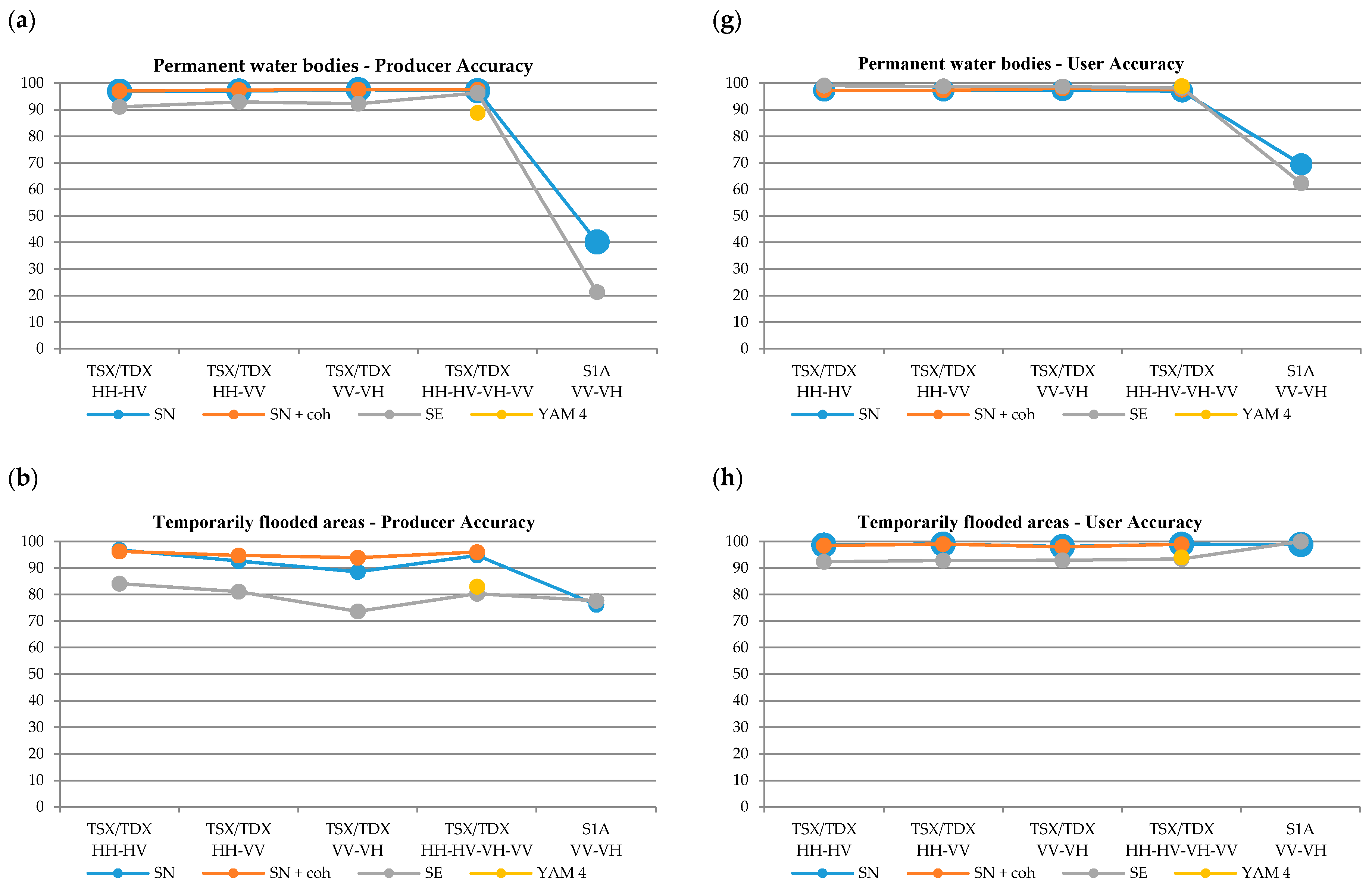
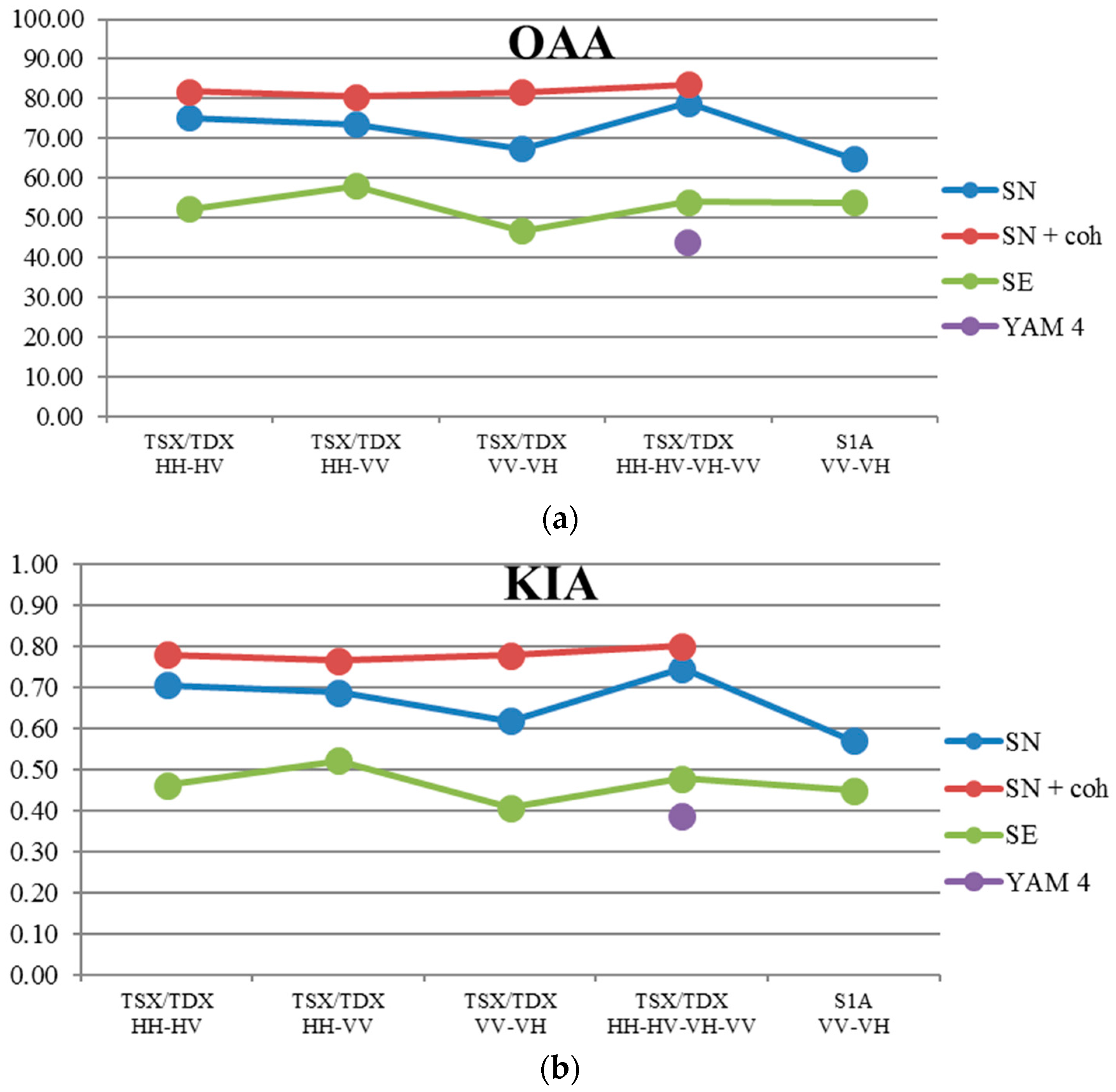
- Mapping wetlands with the C-band S1A alone, based on the multi-temporal series of SAR images with VV/VH polarization. The results achieved with the time series of S1A SN were quite poor. The OAA for all classes equaled 65% and the KIA was 0.58. These values were not satisfactory. For this reason, the S1A dataset was not recommended for herbaceous wetland mapping in the Biebrza valley. There was a second disadvantageous feature of the S1A dataset; its geometric resolution was too coarse to detect not only the small areas of vegetation associations adjacent to oxbows and floodplain lakes, but also the small permanent water bodies.
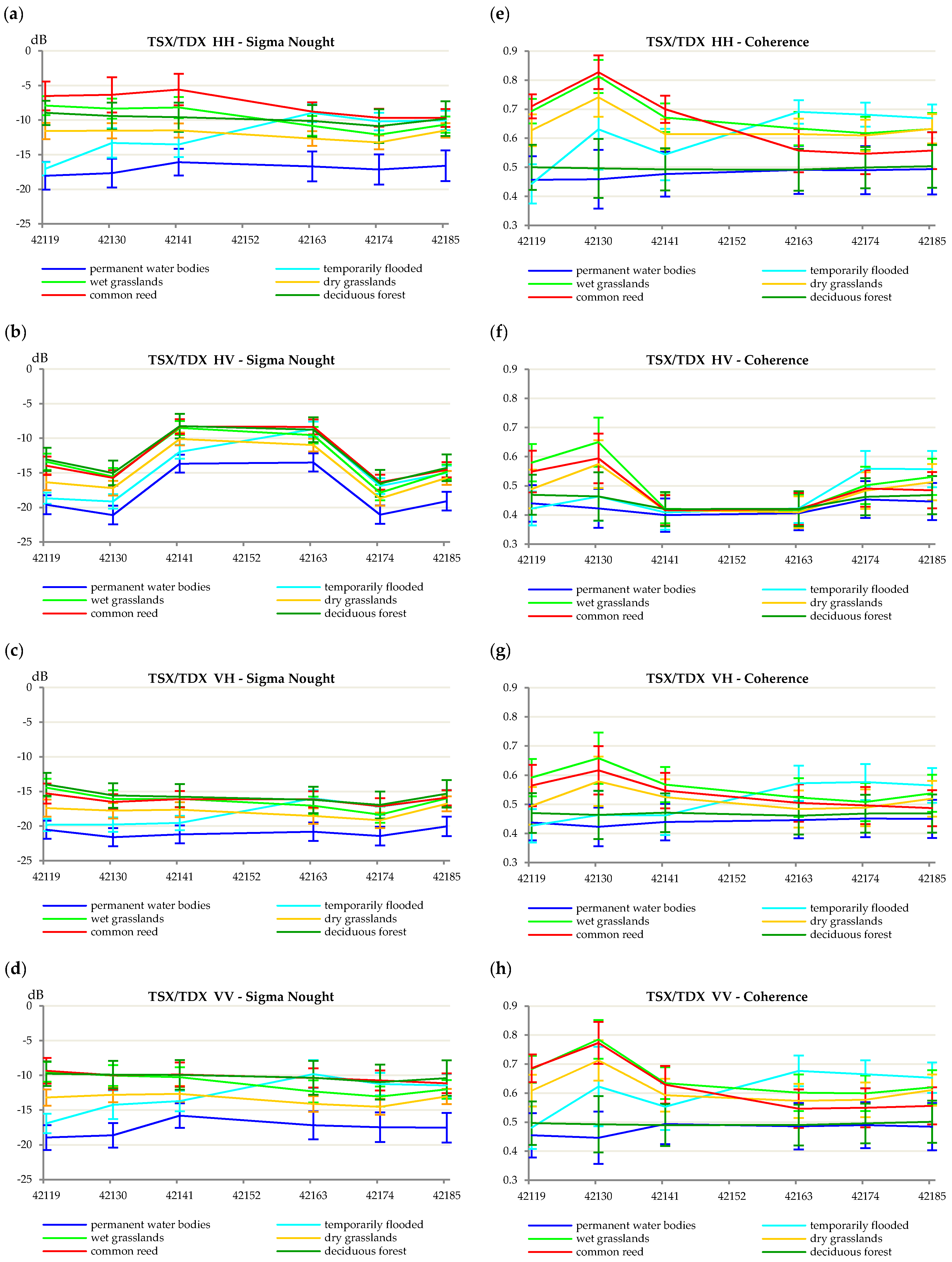
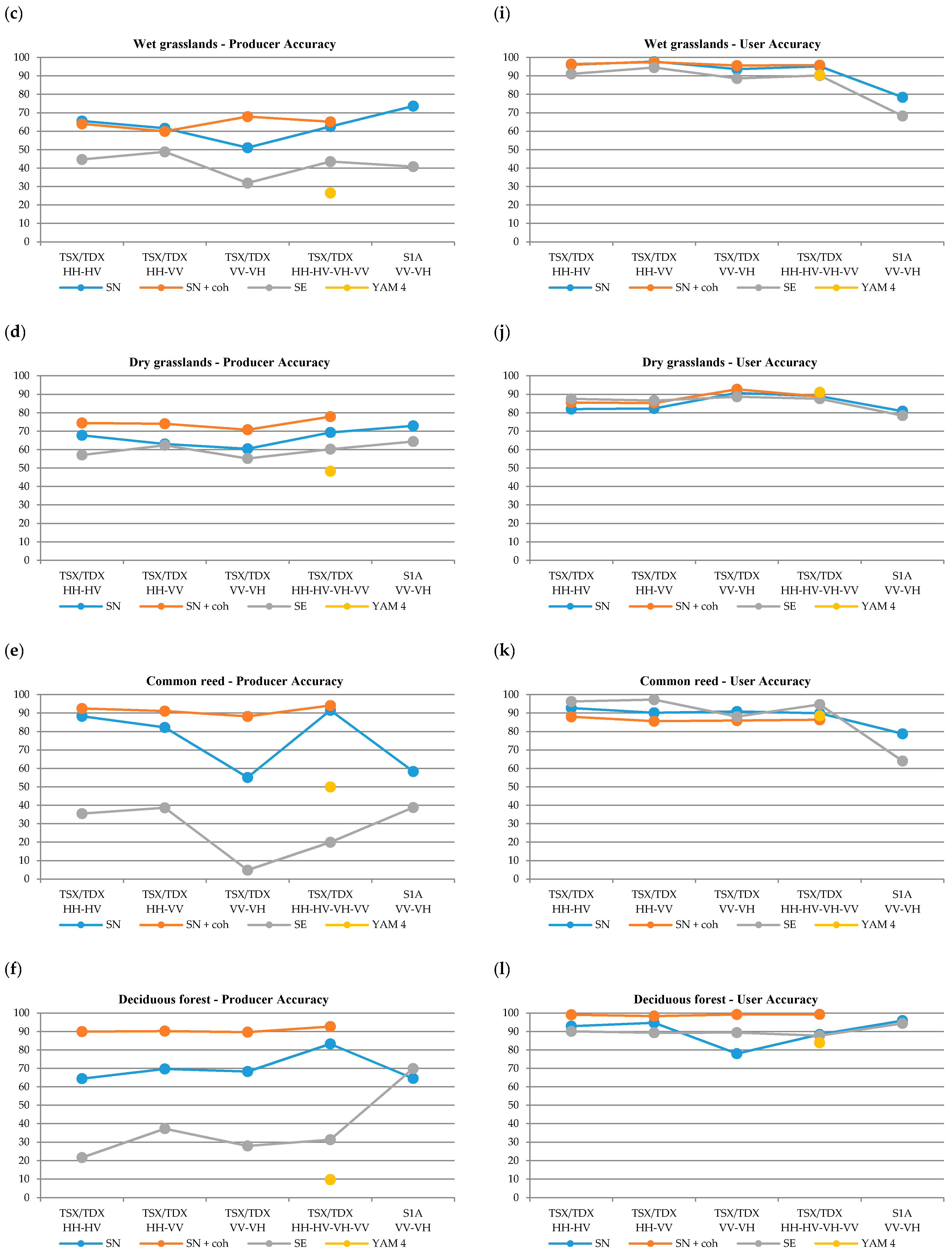
- Mapping wetlands with the experimental fully-polarimetric quad-pol X-band TSX/TDX data. The results achieved (polarizations VV/VH/HV/HH) are the best amongst all the SN time series. The OAA was 79%, with a high coefficient of agreement, KIA, of 0.75. The results achieved using the fully polarimetric data and the Yamaguchi four-component decomposition (YAM4) were less useful than expected because the OAA was 43% and the KIA was 0.39. For this area and for the majority of classes over time, the dominant scattering mechanism was volume scattering, which decreased the OAA. The advantage of this decomposition was in revealing partially flooded herbaceous vegetation by the double bounce effect for particular TSX/TDX acquisitions. The results achieved using SE decomposition were better than those using the YAM4 dataset: the OAA was 55% and the KIA was 0.48. This could have been caused by the intensity component contribution outside of the polarimetric behavior.
- Comparing wetland mapping using the dual polarization TSX/TDX subsets; that is, HH-HV, HH-VV and VV-VH. For the dual-pol TSX/TDX products, the OAA and KIA were smaller than those from the four polarizations dataset: OAA = 76% and KIA = 0.71 for HH/HV; OAA = 74% and KIA = 0.69 for HH/VV; and OAA = 68% and KIA = 0.63 for VV/VH. However, there was a relatively small difference between the results achieved by quad-pol and the best dual-pol (HH/HV). Thus, this configuration can be recommended for wetland mapping purposes.
- Comparing wetland mapping using S1A and TSX/TDX, considering the same polarization (VV-VH) and covering the same observation period. The TSX/TDX dataset showed better performance. The difference of the OAA for the S1A and TSX/TDX datasets was about 3%. It seemed that the coarser geometric resolution had a negative influence on the results achieved by the S1A dataset.
- Studying the suitability of the Shannon Entropy as polarimetric descriptor of wetland land cover. The results achieved with the SE time series were quite poor, with the OAA ranging from 47% to 58%, and KIA ranging from 0.41 and 0.52. As a consequence, this dataset is not recommended for the mapping of the herbaceous wetland at all. The OAA values are lower for the pairs of bands containing cross-pol components (VH or HV). According to Reference [22], these components are strongly affected by the noise equivalent sigma zero over wetlands areas, thus affecting the SE parameter.
- Assessing the contribution of the interferometric coherence as an additional layer for land cover classification. The interferometric coherence estimated for the acquisitions of S1A, with a 12-day interval, and TSX/TDX, with an 11-day interval, turned out to be useless as land cover discriminators over this wetland. On the other hand, the coherence calculated for the TSX/TDX interferometric pairs acquired simultaneously (at the same time from two sensors) causes an increase of the OAA comparing to the SN time series. The OAA increased 7% for the HH-HV and HH-VV, 15% for the VV-VH, and 4% for the VV-VH-HV-HH datasets. The interferometric coherence is considered an important asset of quad-pol TSX/TDX acquisitions.
4. Conclusions
- Open water mapping (flood) at the scale of the Middle and Lower Basins of the Biebrza River based on the dual-pol sigma nought time series of Sentinel-1 for assessing annual hydrological conditions influencing biodiversity.
- Submerged vegetation mapping both from the Sentinel-1 and the TerraSAR-X Strip Map for: (i) assessing annual hydrological conditions, and (ii) mapping the presence of water in the periods of grass mowing on the parcels used temporarily by farmers for hay production.
- Checking the common reed mowing during winter as agreed between BbNP and the farmers using the TerraSAR-X HH/HV dual-pol. This action is ecologically important for the improvement of the life conditions of wading birds.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brisco, B. Mapping and Monitoring Surface Water and Wetlands with Synthetic Aperture Radar. In Remote Sensing of Wetlands: Applications and Advances; CRC Press: New York, NY, USA, 2015; pp. 119–136. ISBN 1482237385. [Google Scholar]
- Dabrowska-Zielinska, K.; Budzynska, M.; Tomaszewska, M.; Bartold, M.; Gatkowska, M.; Malek, I.; Turlej, K.; Napiorkowska, M. Monitoring wetlands ecosystems using ALOS PALSAR (L-Band, HV) supplemented by optical data: A case study of Biebrza Wetlands in Northeast Poland. Remote Sens. 2014, 6, 1605–1633. [Google Scholar] [CrossRef]
- Dabrowska-Zielinska, K.; Budzynska, M.; Tomaszewska, M.; Bartold, M.; Gatkowska, M. The study of multifrequency microwave satellite images for vegetation biomass and humidity of the area under Ramsar convention. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; Volume 2015, pp. 5198–5200. [Google Scholar]
- Schlaffer, S.; Chini, M.; Dettmering, D.; Wagner, W. Mapping wetlands in Zambia using seasonal backscatter signatures derived from ENVISAT ASAR time series. Remote Sens. 2016, 8, 402. [Google Scholar] [CrossRef]
- Marechal, C.; Pottier, E.; Hubert-Moy, L.; Rapinel, S. One year wetland survey investigations from quad-pol RADARSAT-2 time-series SAR images. Can. J. Remote Sens. 2012, 38, 240–252. [Google Scholar] [CrossRef]
- Hong, S.H.; Wdowinski, S. Double-bounce component in cross-polarimetric SAR from a new scattering target decomposition. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3039–3051. [Google Scholar] [CrossRef]
- Kim, S.; Wdowinski, S.; Amelung, F.; Dixon, T.H.; Won, J.-S. Interferometric Coherence Analysis of the EvergladesWetlands, South Florida. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5210–5224. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Boni, G. Use of SAR data for detecting floodwater in urban and agricultural areas: The role of the interferometric coherence. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1532–1544. [Google Scholar] [CrossRef]
- Cazals, C.; Rapinel, S.; Frison, P.-L.; Bonis, A.; Mercier, G.; Mallet, C.; Corgne, S.; Rudant, J.-P. Mapping and Characterization of Hydrological Dynamics in a Coastal Marsh Using High Temporal Resolution Sentinel-1A Images. Remote Sens. 2016, 8, 570. [Google Scholar] [CrossRef]
- Touzi, R. Target scattering decomposition in terms of roll-invariant target parameters. IEEE Trans. Geosci. Remote Sens. 2007, 45, 73–84. [Google Scholar] [CrossRef]
- Baghdadi, N.; Bernier, M.; Gauthier, R.; Neeson, I. Evaluation of C-band SAR data for wetlands mapping. Int. J. Remote Sens. 2001, 22, 71–88. [Google Scholar] [CrossRef]
- Niculescu, S.; Lardeux, C.; Hanganu, J.; Mercier, G.; David, L. Change detection in floodable areas of the Danube delta using radar images. Nat. Hazards 2015, 78, 1899–1916. [Google Scholar] [CrossRef] [Green Version]
- Biebrza National Park. Available online: https://www.biebrza.org.pl/lang,2 (accessed on 31 October 2017).
- Ramsar the List of Wetlands of International Importance. Ramsar 2016, 1–48. Available online: http://www.ramsar.org/pdf/sitelist.pdf (accessed on 31 October 2017).
- Hajnsek, I.; Busche, T.; Krieger, G.; Zink, M.; Schulze, D.; Moreira, A. Tandem-X Ground Segment, Announcement of Opportunity: Tandem-X Science Phase; Microwaves and Radar Institute of the German Aerospace Centre (DLR): Oberpfaffenhofen, Germany, 2014; pp. 1–27. [Google Scholar]
- Nuno, M.; Meadows, P.J. Radiometric Calibration of S-1 Level-1 Products Generated by the S-1 IPF; Tech. Note; European Space Agency: Paris, France, 2015; pp. 1–13. [Google Scholar]
- Infoterra an EADS Astrium Company. Radiometric Calibration of TerraSAR-X Data, Beta Naught and Sigma Naught Coefficient Calculation; Infoterra an EADS Astrium Company: Friedrichshafen, Germany, 2008; pp. 1–16. [Google Scholar]
- De Grandi, G.F.; Leysen, M.; Lee, J.S.; Schuler, D. Radar reflectivity estimation using multiple SAR scenes of the same target: Technique and applications. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Singapore, 3–8 August 1997; Volume 2, pp. 1047–1050. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Gurrola, E.; Rogez, F.; Chan, S.; Martin, J.; Rodriguez, E. SRTM C-band topographic data: Quality assessments and calibration activities. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, NSW, Australia, 9–13 July 2001; Volume 2, pp. 739–741. [Google Scholar]
- Marschalk, U.; Roth, A.; Eineder, M.; Suchandt, S. Comparison of DEMs derived from SRTM/X- and C-band. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium (IGARSS’04), Anchorage, AK, USA, 20–24 September 2004; Volume 7, pp. 4531–4534. [Google Scholar]
- Hanssen, R.F. Radar Interferometry—Data Interpretation and Error Analysis; Springer: Dordrecht, The Netherlands, 2001; Volume 2, ISBN 978-0-7923-6945-5. [Google Scholar]
- Betbeder, J.; Rapinel, S.; Corgne, S.; Pottier, E.; Hubert-Moy, L. TerraSAR-X dual-pol time-series for mapping of wetland vegetation. ISPRS J. Photogramm. Remote Sens. 2015, 107, 90–98. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009; Volume 440. [Google Scholar]
- Cloude, S. Polarisation: Applications in Remote Sensing; Oxford University Press: Oxford, UK, 2009; ISBN 9780199569731. [Google Scholar]
- Pottier, E.; Ferro-Famil, L. PolSARPro V5.0: An ESA educational toolbox used for self-education in the field of POLSAR and POL-INSAR data analysis. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 7377–7380. [Google Scholar]
- Sarmap. Available online: http://www.sarmap.ch/ (accessed on 31 October 2017).
- Simonetto, E.; Follin, J.M. An overview on interferometric SAR software and a comparison between DORIS and SARSCAPE Packages. In Geospatial Free and Open Source Software in the 21st Century; Lecture Notes in Geoinformation and Cartography; Springer: Berlin/Heidelberg, Germany, 2012; pp. 107–122. [Google Scholar]
- Lee, J. Sen Speckle analysis and smoothing of synthetic aperture radar images. Comput. Graph. Image Process. 1981, 17, 24–32. [Google Scholar] [CrossRef]
- Richards, J.A. Remote Sensing with Imaging Radar; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 9783642020193. [Google Scholar]
- Morio, J.; Refregier, P.; Goudail, F.; Dubois-Fernandez, P.C.; Dupuis, X. A characterization of shannon entropy and bhattacharyya measure of contrast in polarimetric and interferometric SAR image. Proc. IEEE 2009, 97, 1097–1108. [Google Scholar] [CrossRef]
- Chung, J.K.; Kannappan, P.L.; Ng, C.T.; Sahoo, P.K. Measures of distance between probability distributions. J. Math. Anal. Appl. 1989, 138, 280–292. [Google Scholar] [CrossRef]
- Lee, K.Y.; Bretschneider, T.R. Separability measures of target classes for polarimetric synthetic aperture radar imagery. Asian J. Geoinform. 2012, 12, 27–46. [Google Scholar]
- Tou, J.T.; Gonzalez, R.C. Pattern Recognition Principles; Addison-Wesley Publishing Company: Reading, MA, USA, 1974; pp. 89–126. ISBN 9780201075861. [Google Scholar]
- Lardeux, C.; Frison, P.L.; Rudant, J.P.; Souyris, J.C.; Tison, C.; Stoll, B. Classification of fully polarimetric SAR data for land use cartography. ISPRS J. Photogramm. Remote Sens. 2006, 23–27. [Google Scholar] [CrossRef]
- Shah Hosseini, R.; Entezari, I.; Homayouni, S.; Motagh, M.; Mansouri, B. Classification of polarimetric SAR images using Support Vector Machines. Can. J. Remote Sens. 2011, 37, 220–233. [Google Scholar] [CrossRef]
- Sukawattanavijit, C.; Chen, J.; Zhang, H. GA-SVM Algorithm for Improving Land-Cover Classification Using SAR and Optical Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 284–288. [Google Scholar] [CrossRef]
- Mantero, P.; Moser, G.; Serpico, S.B. Partially supervised classification of remote sensing images through SVM-based probability density estimation. IEEE Trans. Geosci. Remote Sens. 2005, 43, 559–570. [Google Scholar] [CrossRef]
- Ozdogan, M. Image classification methods in land cover and land use. In Remotely Sensed Data Characterization, Classification, and Accuracies; Prasad, S., Thenkabail, P.D., Eds.; CRC Press: Boca Raton, FL, USA, 2015; 712p, ISBN 978-1482217865. [Google Scholar]
- Hudson, W.D.; Ramm, C.W. Correct formulation of the Kappa coefficient of agreement. Photogramm. Eng. Remote Sens. 1987, 53, 421–422. [Google Scholar]
- Story, M.; Congalton, R.G. Accuracy assessment: A user’s perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar] [CrossRef]
- Aronoff, S. Classification accuracy: A user approach. Photogramm. Eng. Remote Sens. 1982, 48, 1299–1307. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Class | Number of Parcels | Number of Pixels TSX/TDX | Number of Pixels Sentinel-1A | Area (ha) |
|---|---|---|---|---|---|
| 1 | grasslands/meadows | 15 | 14,968 | 979 | 9.36 |
| 2 | deciduous forest | 10 | 39,830 | 2553 | 24.89 |
| 3 | bur-reed | 3 | 371 | 20 | 0.23 |
| 4 | sweet-grass | 23 | 16,712 | 1137 | 10.45 |
| 5 | reed canary | 19 | 7848 | 549 | 4.91 |
| 6 | lakeshore bulrush | 4 | 454 | 34 | 0.28 |
| 7 | bulrush | 13 | 850 | 71 | 0.53 |
| 8 | common reed | 47 | 17,556 | 1260 | 10.97 |
| 9 | sedge | 25 | 19,062 | 1266 | 11.91 |
| 10 | water bodies | 14 | 56,510 | 3775 | 35.32 |
| 11 | dogwood | 9 | 933 | 66 | 0.58 |
| 12 | willow scrub | 7 | 2052 | 138 | 1.28 |
| Mission | TSX/TDX | Sentinel-1A |
|---|---|---|
| Frequency | 9.65 GHz | 5.405 GHz |
| Wavelength | X (3 cm) | C (5.6 cm) |
| Imaging Mode | Stripmap | Interferometric Wide |
| Track | stripFar_009 | 153 |
| Orbit | Ascending | Descending |
| Product | CoSSC | SLC |
| Ground resolution, rg by az | 1.2 m × 6.6 m | 3.1 m × 21.7 m |
| Pixel spacing, rg by az | 0.9 m × 2.2 m | 2.3 m × 13.8 m |
| Polarization | Quad (HH, HV, VH, VV) | Dual (VV, VH) |
| Incidence angle at the centre of the Area of Interest | 36° | 38.9° |
| Revisit time | 11 days | 12 days |
| Covered area | 15 km × 30 km | 250 km × 170 km |
| Dataset | Contents |
|---|---|
| SN | Sigma Nought images |
| SN + Coh | Sigma Nought and coherence images |
| SE | Shannon Entropy images |
| YAM4 | Yamaguchi four-component decomposition results (quad-pol data only) |
| No. | Class | Number of Parcels | Number of Pixels TSX/TDX | Number of Pixels Sentinel-1A | Area (ha) |
|---|---|---|---|---|---|
| 1 | permanent water bodies | 10 | 36,299 | 2502 | 22.69 |
| 2 | temporarily flooded grasslands | 12 | 8771 | 576 | 5.48 |
| 3 | wet grasslands | 8 | 46,295 | 2952 | 28.93 |
| 4 | dry grasslands | 27 | 61,657 | 3891 | 38.54 |
| 5 | common reed | 14 | 14,389 | 1010 | 8.99 |
| 6 | deciduous forest | 5 | 53,627 | 3409 | 33.52 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mleczko, M.; Mróz, M. Wetland Mapping Using SAR Data from the Sentinel-1A and TanDEM-X Missions: A Comparative Study in the Biebrza Floodplain (Poland). Remote Sens. 2018, 10, 78. https://doi.org/10.3390/rs10010078
Mleczko M, Mróz M. Wetland Mapping Using SAR Data from the Sentinel-1A and TanDEM-X Missions: A Comparative Study in the Biebrza Floodplain (Poland). Remote Sensing. 2018; 10(1):78. https://doi.org/10.3390/rs10010078
Chicago/Turabian StyleMleczko, Magdalena, and Marek Mróz. 2018. "Wetland Mapping Using SAR Data from the Sentinel-1A and TanDEM-X Missions: A Comparative Study in the Biebrza Floodplain (Poland)" Remote Sensing 10, no. 1: 78. https://doi.org/10.3390/rs10010078
APA StyleMleczko, M., & Mróz, M. (2018). Wetland Mapping Using SAR Data from the Sentinel-1A and TanDEM-X Missions: A Comparative Study in the Biebrza Floodplain (Poland). Remote Sensing, 10(1), 78. https://doi.org/10.3390/rs10010078