Estimating Evapotranspiration in a Post-Fire Environment Using Remote Sensing and Machine Learning


Abstract
:
1. Introduction
2. Materials and Methods
2.1. SVM Regression
2.2. SVM Model Development
2.2.1. Datasets
2.2.2. SVM Training and Tuning
2.3. SVM Model Application
3. Results
3.1. SVM Sensitivity Analysis
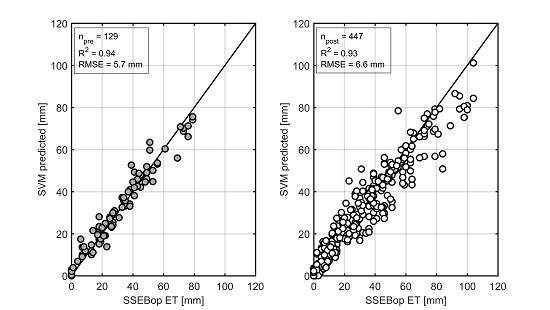
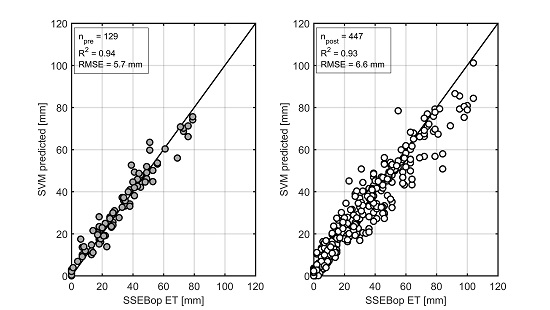
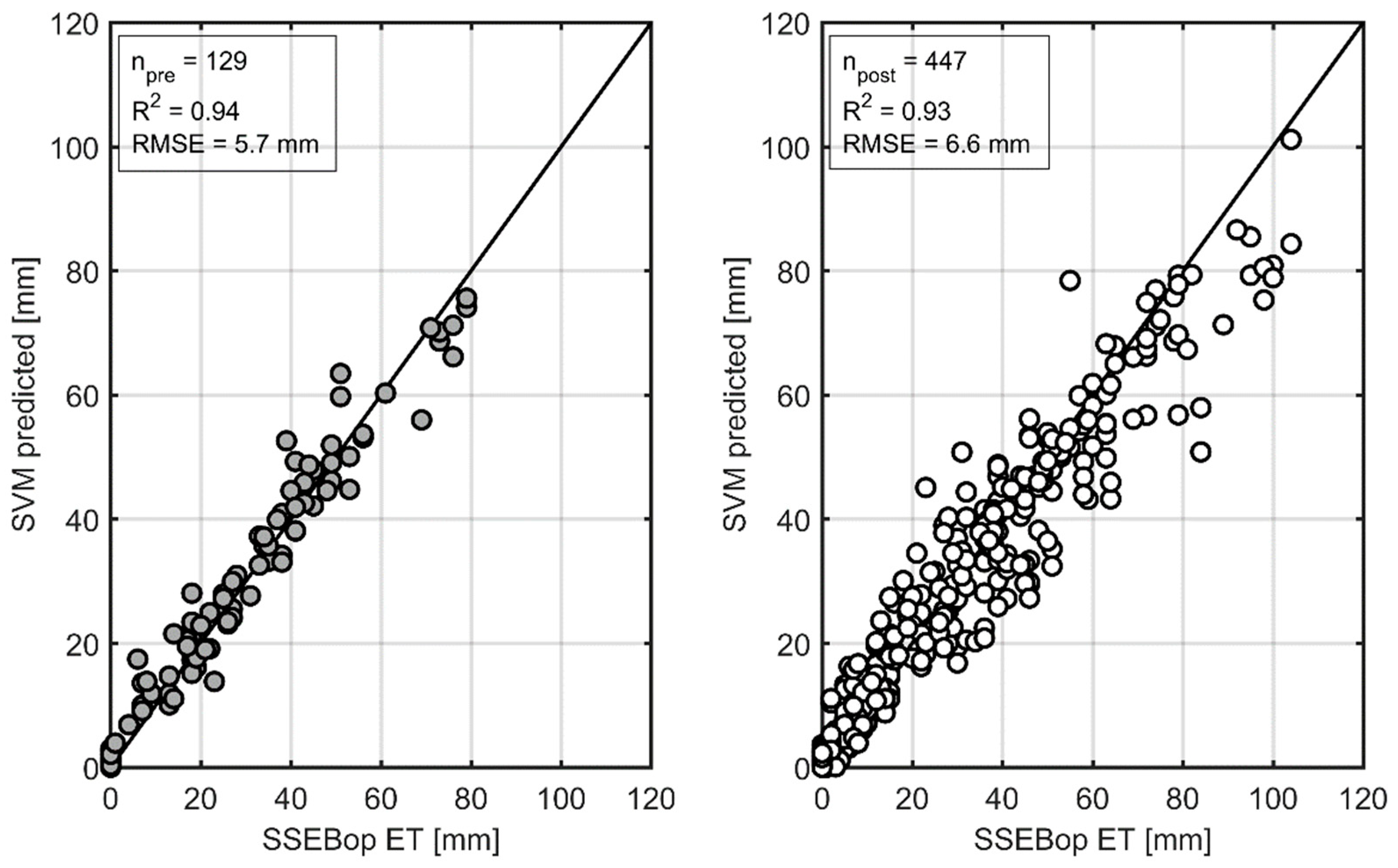
3.2. SVM-ET6 Model Performance and Prediction
3.3. Application of SVM-ET6
4. Discussion
4.1. SVM Sensitivity Analysis
4.2. SVM-ET6 Model Application and Performance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Support Vector Machine Regression

References
- Kim, J.; Hogue, T.S. Evaluation of a MODIS triangle-based evapotranspiration algorithm for semi-arid regions. J. Appl. Remote Sens. 2013, 7, 73493. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.Y.; Singh, V.P. Evaluation of three complementary relationship evapotranspiration models by water balance approach to estimate actual regional evapotranspiration in different climatic regions. J. Hydrol. 2005, 308, 105–121. [Google Scholar] [CrossRef]
- Ebel, B.A. Simulated unsaturated flow processes after wildfire and interactions with slope aspect. Water Resour. Res. 2013, 49, 8090–8107. [Google Scholar] [CrossRef] [Green Version]
- Bart, R.R. A regional estimate of postfire streamflow change in California. Water Resour. Res. 2016, 52, 1465–1478. [Google Scholar] [CrossRef]
- Poon, P.K.; Kinoshita, A.M. Spatial and temporal evapotranspiration trends after wildfire in semi-arid landscapes. J. Hydrol. 2018, 559, 71–83. [Google Scholar] [CrossRef]
- Westerling, A.L.; Hidalgo, H.G.; Cayan, D.R.; Swetnam, T.W. Warming and earlier spring increase Western U.S. forest wildfire activity. Science 2006, 313, 940–943. [Google Scholar] [CrossRef] [PubMed]
- Abatzoglou, J.T.; Williams, A.P. Impact of anthropogenic climate change on wildfire across western US forests. Proc. Natl. Acad. Sci. USA 2016, 113, 11770–11775. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barik, M.G.; Hogue, T.S.; Franz, K.J.; Kinoshita, A.M. Assessing Satellite and Ground-Based Potential Evapotranspiration for Hydrologic Applications in the Colorado River Basin. JAWRA J. Am. Water Resour. Assoc. 2016, 52, 48–66. [Google Scholar] [CrossRef]
- Bowman, A.L.; Franz, K.J.; Hogue, T.S.; Kinoshita, A.M. MODIS-based potential evapotranspiration demand curves for the Sacramento Soil Moisture Accounting model. J. Hydrol. Eng. 2015, 21, 4015055. [Google Scholar] [CrossRef]
- Bastiaanssen, W.G.M.; Menenti, M.; Feddes, R.A.; Holtslagc, A.A.M. A remote sensing surface energy balance algorithm for land (SEBAL). 1. Formulation. J. Hydrol. 1998, 212–213, 213–229. [Google Scholar] [CrossRef]
- Su, Z. The Surface Energy Balance System (SEBS) for estimation of turbulent heat fluxes. Hydrol. Earth Syst. Sci. 2002, 6, 85–100. [Google Scholar] [CrossRef] [Green Version]
- Allen, R.G.; Tasumi, M.; Trezza, R. Satellite-Based Energy Balance for Mapping Evapotranspiration with Internalized Calibration (METRIC)—Model. J. Irrig. Drain. Eng. 2007, 133, 380–394. [Google Scholar] [CrossRef]
- Norman, J.M.; Kustas, W.P.; Humes, K.S. Source approach for estimating soil and vegetation energy fluxes in observations of directional radiometric surface temperature. Agric. For. Meteorol. 1995, 77, 263–293. [Google Scholar] [CrossRef]
- Mu, Q.; Zhao, M.; Running, S.W. Improvements to a MODIS global terrestrial evapotranspiration algorithm. Remote Sens. Environ. 2011, 115, 1781–1800. [Google Scholar] [CrossRef]
- Yang, Y.; Shang, S. A hybrid dual-source scheme and trapezoid framework-based evapotranspiration model (HTEM) using satellite images: Algorithm and model test. J. Geophys. Res. Atmos. 2013, 118, 2284–2300. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Islam, S. An intercomparison of regional latent heat flux estimation using remote sensing data. Int. J. Remote Sens. 2003, 24, 2221–2236. [Google Scholar] [CrossRef]
- Wang, K.; Li, Z.; Cribb, M. Estimation of evaporative fraction from a combination of day and night land surface temperatures and NDVI: A new method to determine the Priestley–Taylor parameter. Remote Sens. Environ. 2006, 102, 293–305. [Google Scholar] [CrossRef]
- Senay, G.B.; Bohms, S.; Singh, R.K.; Gowda, P.H.; Velpuri, N.M.; Alemu, H.; Verdin, J.P. Operational Evapotranspiration Mapping Using Remote Sensing and Weather Datasets: A New Parameterization for the SSEB Approach. J. Am. Water Resour. Assoc. 2013, 49, 577–591. [Google Scholar] [CrossRef]
- Biggs, T.W.; Marshall, M.; Messina, A. Mapping daily and seasonal evapotranspiration from irrigated crops using global climate grids and satellite imagery: Automation and methods comparison. Water Resour. Res. 2016, 52, 7311–7326. [Google Scholar] [CrossRef]
- Bhattarai, N.; Shaw, S.B.; Quackenbush, L.J.; Im, J.; Niraula, R. Evaluating five remote sensing based single-source surface energy balance models for estimating daily evapotranspiration in a humid subtropical climate. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 75–86. [Google Scholar] [CrossRef]
- Mitchell, T. Machine Learning; McGraw Hill: New York, NY, USA, 1997. [Google Scholar]
- Bhattacharya, B.; Price, R.K.; Solomatine, D.P. Machine learning approach to modeling sediment transport. J. Hydraul. Eng. 2007, 133, 440–450. [Google Scholar] [CrossRef]
- Yang, F.; White, M.A.; Michaelis, A.R.; Ichii, K.; Hashimoto, H.; Votava, P.; Zhu, A.-X.; Nemani, R.R. Prediction of continental-scale evapotranspiration by combining MODIS and AmeriFlux data through support vector machine. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3452–3461. [Google Scholar] [CrossRef]
- Parasuraman, K.; Elshorbagy, A.; Carey, S.K. Modelling the dynamics of the evapotranspiration process using genetic programming. Hydrol. Sci. J. 2007, 52, 563–578. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, S.; Kalra, A.; Stephen, H. Estimating soil moisture using remote sensing data: A machine learning approach. Adv. Water Resour. 2010, 33, 69–80. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Ramirez, M.R.; Islam, T. Machine learning techniques for downscaling SMOS satellite soil moisture using MODIS land surface temperature for hydrological application. Water Resour. Manag. 2013, 27, 3127–3144. [Google Scholar] [CrossRef]
- Hong, W.-C. Rainfall forecasting by technological machine learning models. Appl. Math. Comput. 2008, 200, 41–57. [Google Scholar] [CrossRef]
- Tripathi, S.; Srinivas, V.V.; Nanjundiah, R.S. Downscaling of precipitation for climate change scenarios: A support vector machine approach. J. Hydrol. 2006, 330, 621–640. [Google Scholar] [CrossRef]
- Bray, M.; Han, D. Identification of support vector machines for runoff modelling. J. Hydroinform. 2004, 6, 265–280. [Google Scholar] [CrossRef] [Green Version]
- Jovic, S.; Nedeljkovic, B.; Golubovic, Z.; Kostic, N. Evolutionary algorithm for reference evapotranspiration analysis. Comput. Electron. Agric. 2018, 150, 1–4. [Google Scholar] [CrossRef]
- Torres, A.F.; Walker, W.R.; McKee, M. Forecasting daily potential evapotranspiration using machine learning and limited climatic data. Agric. Water Manag. 2011, 98, 553–562. [Google Scholar] [CrossRef]
- Mohammadrezapour, O.; Piri, J.; Kisi, O. Comparison of SVM, ANFIS and GEP in modeling monthly potential evapotranspiration in an arid region (Case study: Sistan and Baluchestan Province, Iran). Water Sci. Technol. Water Supply 2018. [Google Scholar] [CrossRef]
- Khan, M.S.; Coulibaly, P. Application of support vector machine in lake water level prediction. J. Hydrol. Eng. 2006, 11, 199–205. [Google Scholar] [CrossRef]
- Homer, C.; Huang, C.; Yang, L.; Wylie, B.; Coan, M. Development of a 2001 national land-cover database for the United States. Photogramm. Eng. Remote Sens. 2004, 70, 829–840. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Gao, B.-C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Jia, G.J.; Burke, I.C.; Goetz, A.F.H.; Kaufmann, M.R.; Kindel, B.C. Assessing spatial patterns of forest fuel using AVIRIS data. Remote Sens. Environ. 2006, 102, 318–327. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Rockwell, B.W.; Haire, S.L.; King, T.V.V. Characterization of post-fire surface cover, soils, and burn severity at the Cerro Grande Fire, New Mexico, using hyperspectral and multispectral remote sensing. Remote Sens. Environ. 2007, 106, 305–325. [Google Scholar] [CrossRef]
- Miller, J.D.; Thode, A.E. Quantifying burn severity in a heterogeneous landscape with a relative version of the delta Normalized Burn Ratio (dNBR). Remote Sens. Environ. 2007, 109, 66–80. [Google Scholar] [CrossRef]
- Abatzoglou, J.T. Development of gridded surface meteorological data for ecological applications and modelling. Int. J. Climatol. 2013, 33, 121–131. [Google Scholar] [CrossRef]
- Granger, R.J. Comparison of Surface and Satellite-Derived Estimates of Evapotranspiration Using a Feedback Algorithm. In Proceedings of the 3rd International Workshop on Application of Remote Sensing in Hydrology, NASA Goddard Space Center, Washington, USA, 16–18 October 1996; pp. 71–81. [Google Scholar]
- Israeli, M. The Effect of Soil Surface Condition on the Energy Budget, Soil Temperatures and Evaporation Rate. Ph.D. Thesis, Faculty of Agriculture, Hebrew University of Jerusalem, Jerusalem, Israel, 1966. [Google Scholar]
- Fritschen, L.J. Net and solar radiation relations over irrigated field crops. Agric. Meteorol. 1967, 4, 55–62. [Google Scholar] [CrossRef]
- Schölkopf, B.; Burges, C.J.C.; Smola, A.J. Advances in Kernel Methods: Support Vector Learning; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Coopersmith, E.J.; Minsker, B.S.; Sivapalan, M. Using similarity of soil texture and hydroclimate to enhance soil moisture estimation. Hydrol. Earth Syst. Sci. 2014, 18, 3095–3107. [Google Scholar] [CrossRef] [Green Version]
- Nolan, R.H.; Lane, P.N.J.; Benyon, R.G.; Bradstock, R.A.; Mitchell, P.J. Changes in evapotranspiration following wildfire in resprouting eucalypt forests. Ecohydrology 2014, 7, 1363–1377. [Google Scholar] [CrossRef]
- Zhang, L.; Dawes, W.R.; Walker, G.R. Response of mean annual evapotranspiration to vegetation changes at catchment scale. Water Resour. Res. 2001, 37, 701–708. [Google Scholar] [CrossRef] [Green Version]
- Atchley, A.L.; Kinoshita, A.M.; Lopez, S.R.; Trader, L.; Middleton, R. Simulating Surface and Subsurface Water Balance Changes Due to Burn Severity. Vadose Zone J. 2018, 17. [Google Scholar] [CrossRef]
- Kinoshita, A.M.; Hogue, T.S. Increased dry season water yield in burned watersheds in Southern California. Environ. Res. Lett. 2015, 10, 14003. [Google Scholar] [CrossRef] [Green Version]
- Knipper, K.R.; Kinoshita, A.M.; Hogue, T.S. Evaluation of a moderate resolution imaging spectroradiometer triangle-based algorithm for evapotranspiration estimates in subalpine regions. J. Appl. Remote Sens. 2016, 10, 016002. [Google Scholar] [CrossRef]
- Kinoshita, A.M.; Hogue, T.S. Spatial and temporal controls on post-fire hydrologic recovery in Southern California watersheds. Catena 2011, 87, 240–252. [Google Scholar] [CrossRef]
- Flerchinger, G.N.; Cooley, K.R. A ten-year water balance of a mountainous semi-arid watershed. J. Hydrol. 2000, 237, 86–99. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef] [Green Version]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Abbreviation | Spatial and Temporal Resolution | Source |
|---|---|---|---|
| Modified soil-adjusted vegetation index * | MSAVI | 30-m; 16 days | Landsat 5, 7 and 8 (Global) |
| Normalized differenced moisture index * | NDMI | 30-m; 16 days | Landsat 5, 7 and 8 (Global) |
| Normalized burn ratio * | NBR | 30-m; 16 days | Landsat 5, 7 and 8 (Global) |
| Parameter-elevation Relationships on Independent Slopes Model precipitation * | PRISM PPT | 800-m; monthly | Oregon State (CONUS) |
| Potential evapotranspiration * | ETo | 4-km; daily | University of Idaho, Gridded Surface Meteorological dataset (CONUS) |
| Land surface temperature * | LST | 1-km; daily | MODIS (Global) |
| Albedo * | Albedo | 500-m; daily | MODIS (Global) |
| Existing vegetation types * | EVT | 30-m; 2001, 2008, 2010, 2012, 2014 | LANDFIRE (CONUS) |
| Operational Surface Energy Balance ^ | SSEBop | 1-km; monthly | United States Geological Survey (CONUS) |
| EVT | PRISM | NBR | ETo | Albedo | LST | NDMI | MSAVI | |
|---|---|---|---|---|---|---|---|---|
| MSAVI | 0.72/13.3 | 0.76/12.1 | 0.69/13.8 | 0.80/11.3 | 0.71/13.5 | 0.87/9.04 | 0.72/13.1 | ---- |
| NDMI | 0.73/13.1 | 0.79/11.4 | 0.70/13.8 | 0.81/10.9 | 0.72/13.3 | 0.86/9.23 | ---- | 0.72/13.1 |
| LST | 0.85/9.60 | 0.88/8.74 | 0.87/9.00 | 0.88/8.77 | 0.85/9.70 | ---- | 0.86/9.23 | 0.86/9.23 |
| Albedo | 0.83/10.3 | 0.87/9.00 | 0.87/8.00 | 0.87/9.19 | ---- | 0.85/9.70 | 0.85/9.70 | 0.85/9.70 |
| ETo | 0.85/9.63 | 0.89/8.43 * | 0.88/8.56 | ---- | 0.87/9.20 | 0.87/9.19 | 0.87/9.19 | 0.87/9.19 |
| NBR | 0.86/9.44 | 0.89/8.45 | ---- | 0.86/9.23 | 0.86/9.23 | 0.86/9.23 | 0.86/9.23 | 0.86/9.23 |
| PRISM | 0.88/8.64 | ---- | 0.89/8.45 | 0.89/8.45 | 0.89/8.45 | 0.89/8.45 | 0.89/8.45 | 0.89/8.45 |
| EVT | ---- | 0.88/8.64 | 0.88/8.64 | 0.88/8.64 | 0.88/8.64 | 0.88/8.64 | 0.88/8.64 | 0.88/8.64 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poon, P.K.; Kinoshita, A.M. Estimating Evapotranspiration in a Post-Fire Environment Using Remote Sensing and Machine Learning. Remote Sens. 2018, 10, 1728. https://doi.org/10.3390/rs10111728
Poon PK, Kinoshita AM. Estimating Evapotranspiration in a Post-Fire Environment Using Remote Sensing and Machine Learning. Remote Sensing. 2018; 10(11):1728. https://doi.org/10.3390/rs10111728
Chicago/Turabian StylePoon, Patrick K., and Alicia M. Kinoshita. 2018. "Estimating Evapotranspiration in a Post-Fire Environment Using Remote Sensing and Machine Learning" Remote Sensing 10, no. 11: 1728. https://doi.org/10.3390/rs10111728
APA StylePoon, P. K., & Kinoshita, A. M. (2018). Estimating Evapotranspiration in a Post-Fire Environment Using Remote Sensing and Machine Learning. Remote Sensing, 10(11), 1728. https://doi.org/10.3390/rs10111728