Evaluating Carbon Sequestration and PM2.5 Removal of Urban Street Trees Using Mobile Laser Scanning Data


Abstract
:
1. Introduction
2. Materials
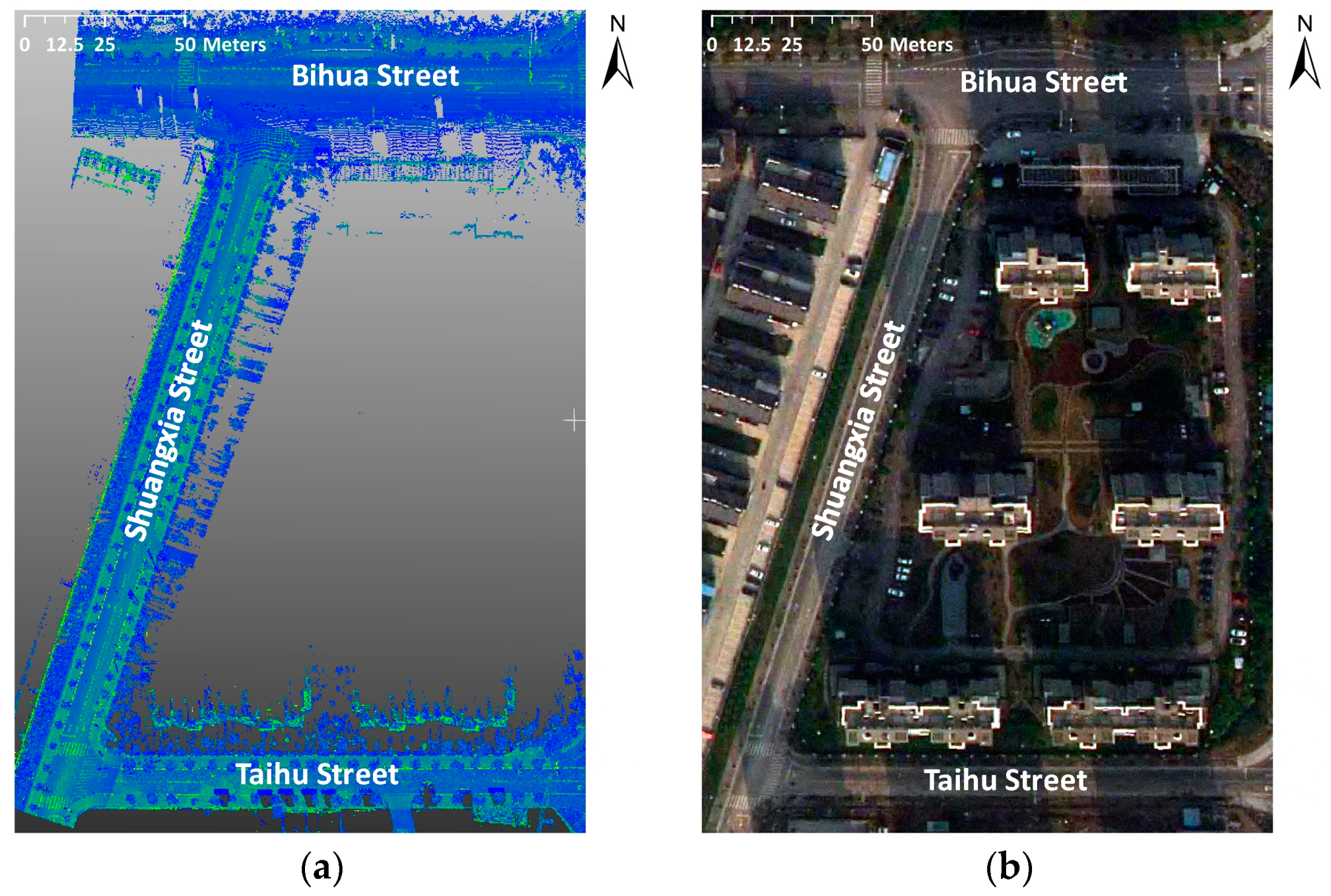
2.1. Study Area
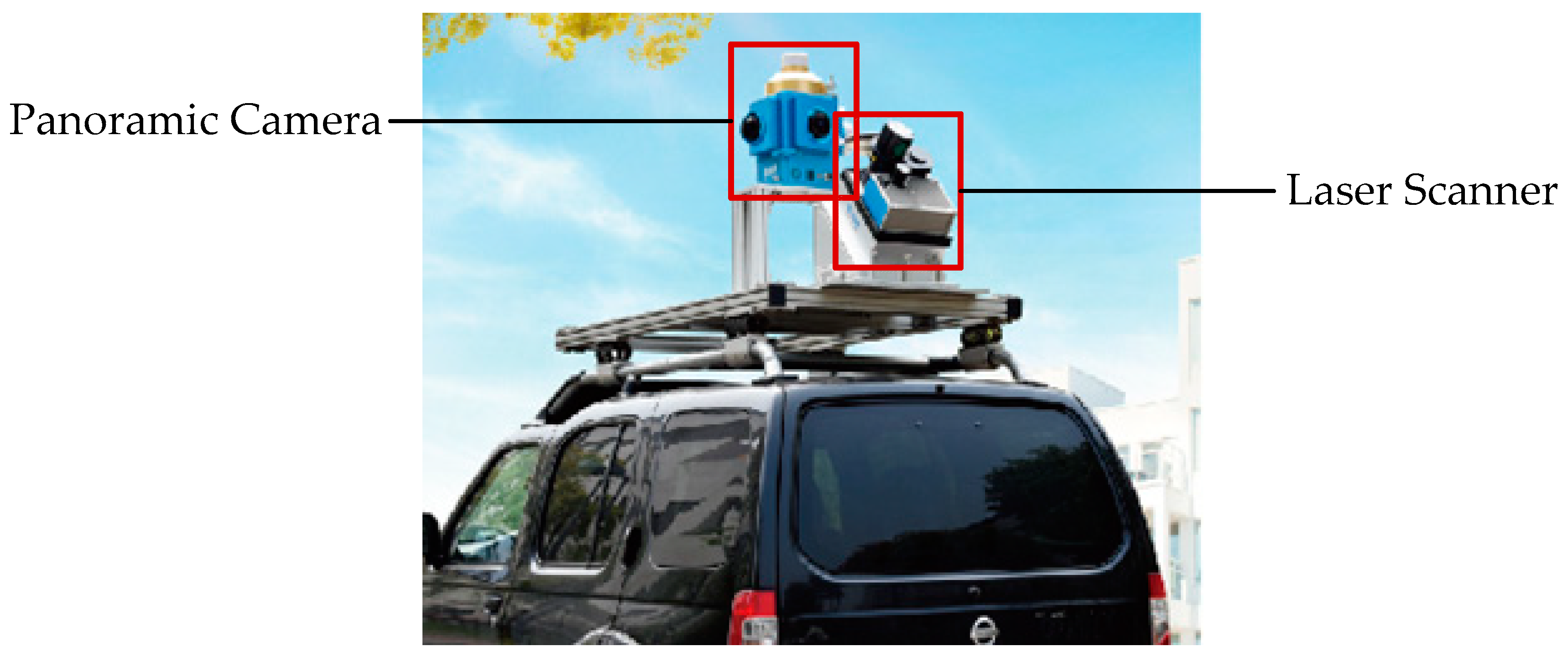
2.2. Data Collection and MLS System
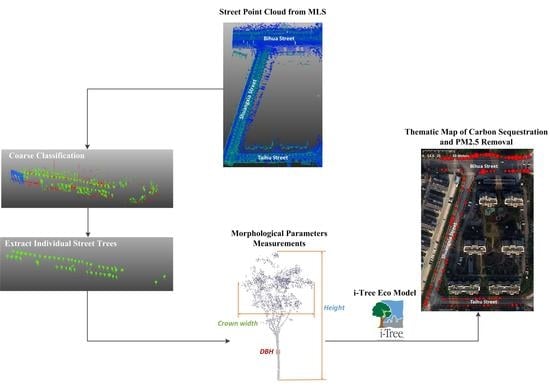
3. Methods
3.1. Individual Street Trees Point Clouds Extraction
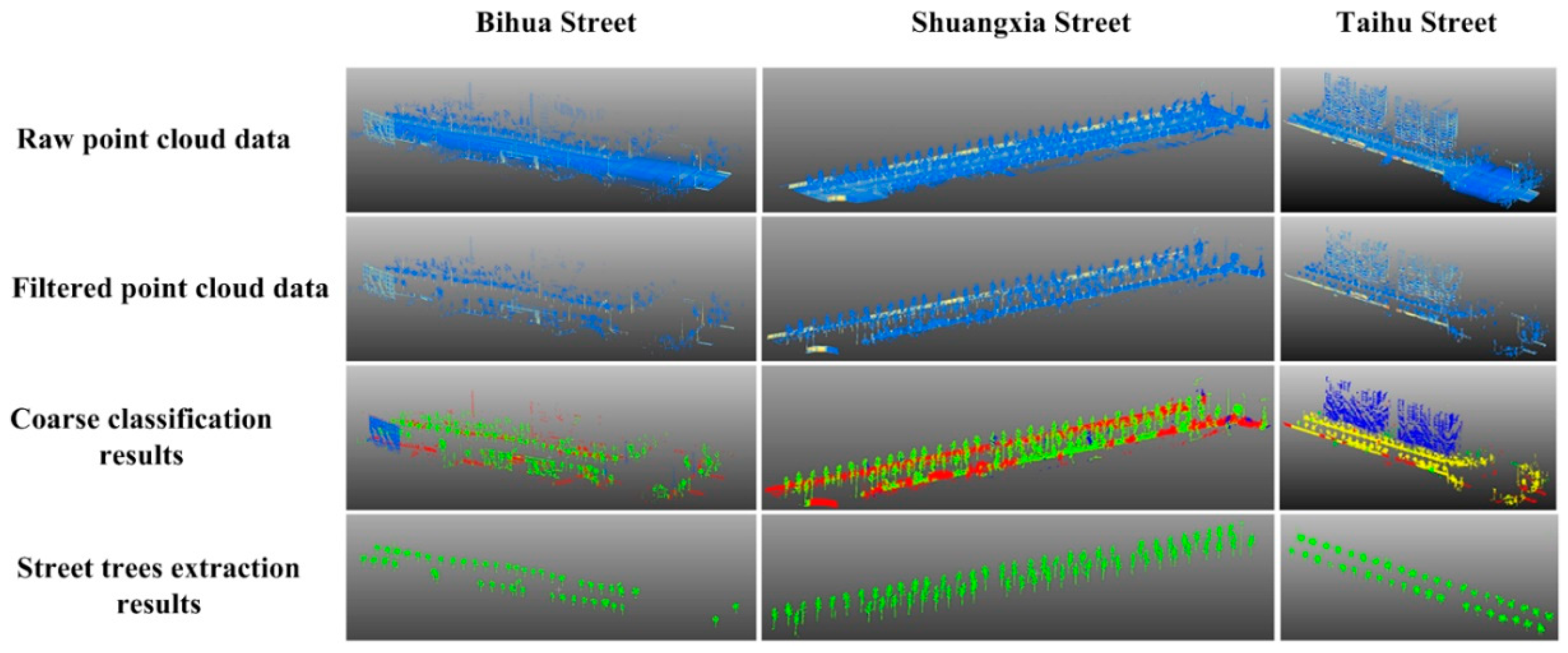
3.1.1. MLS Data Preprocessing
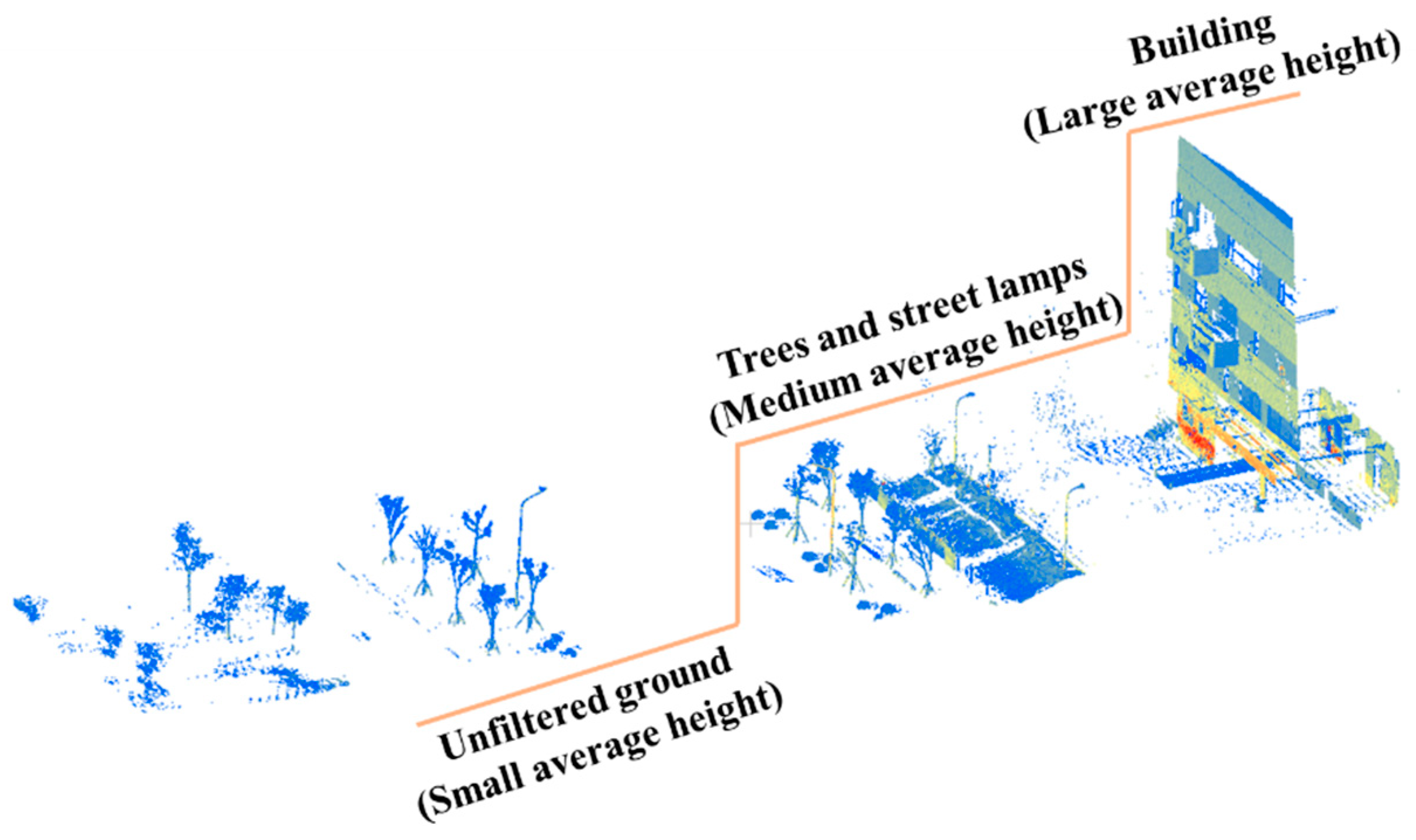
3.1.2. Point Clouds Coarse Classification
| Algorithm 1. Point clouds coarse classification algorithm |
| Input: Filtered MLS point clouds P1 = {(Xi, Yi, Zi)|i = 1, 2, …, n, n is the number of points} Output: Point clouds with classification information P2 = {(Xi, Yi, Zi, cj)|i = 1, 2, …, n, n is the number of points; cj is class number, j = 1, 2, …, m, m is the number of classes} |
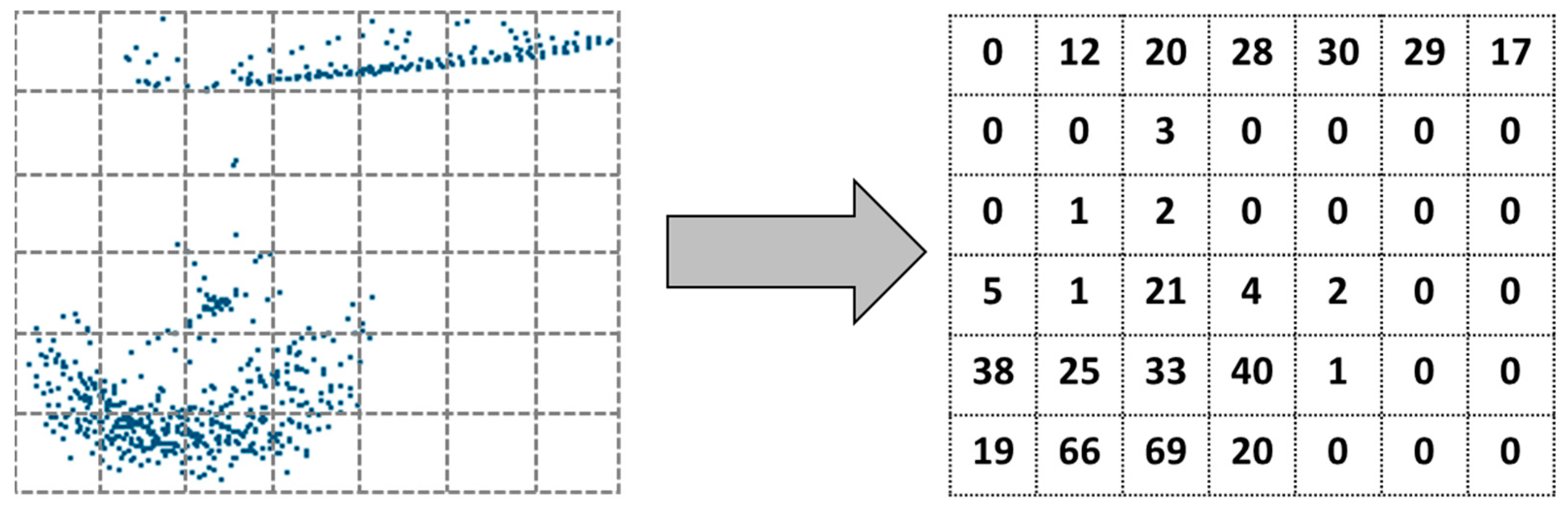
| 1. Set cubic square grids for points and put points into corresponding grids (Figure 6). The size of grid is set as l m × l m × h m, and the value of l is set manually while the value of h is determined according to Equation (1). 2. Stratify points in each grid into layers with a proper spacing (S) (Equation (2), Figure 6) and calculate the average height of points in each layer (Equation (3)). Generally, S can be different for various situations, but it cannot be overly large or small. For most situations, 1m is a proper value for S. 3. Construct an m × n (m is the number of grids, n is the number of layers in each grid (Equation (4))) matrix and each n × 1 vector represents the average heights array of the corresponding grid (Figure 6). 4. Utilize Principal Component Analysis (PCA) to reduce dimensions of the matrix and get the matrix’s dominant features. 5. Use K-means algorithm to complete the classification of the vectors, and points that correspond to vectors, would also find their class. Add classification number, cj, for each point. 6. Return: P2. |
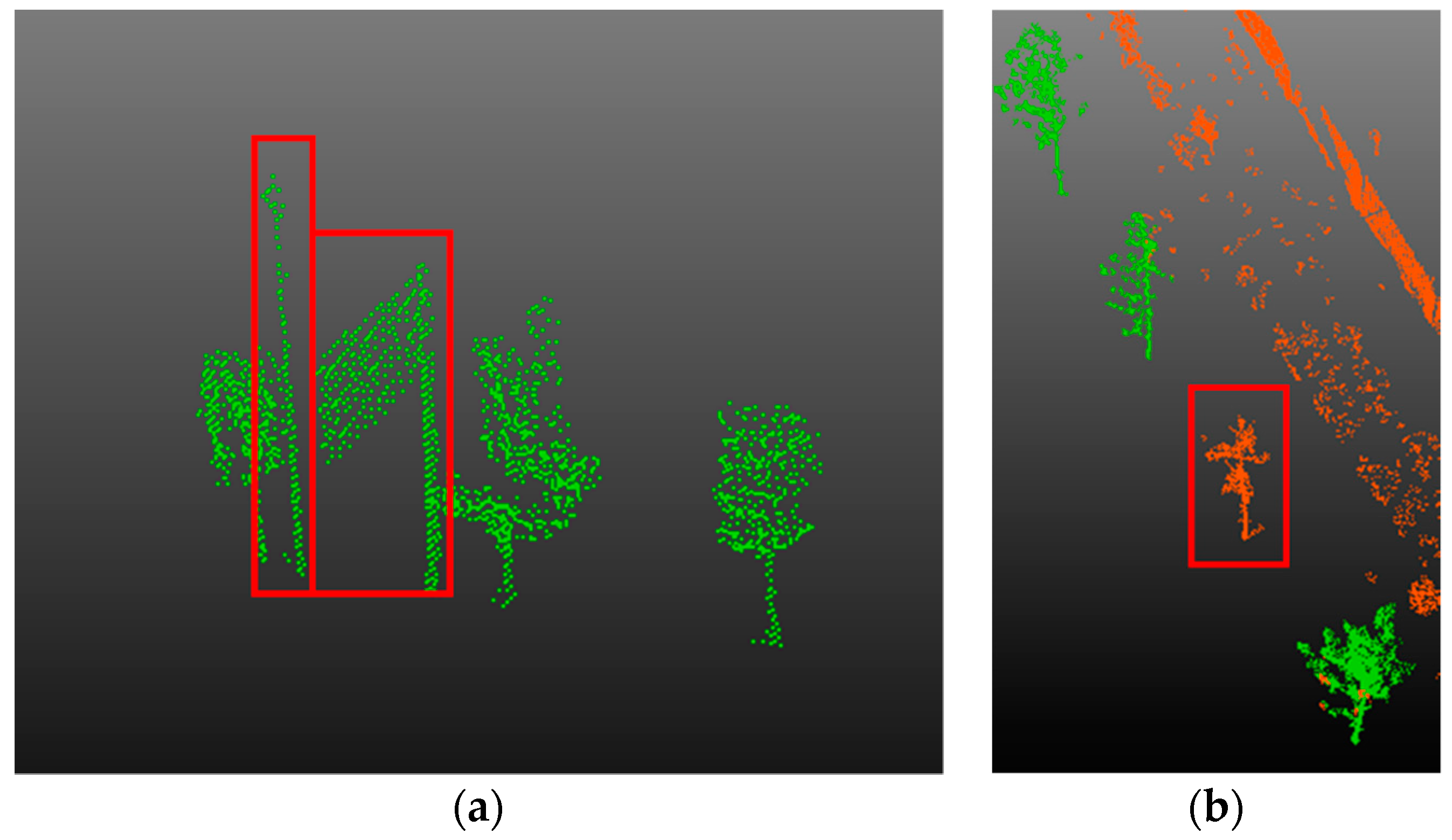
3.1.3. Individual Street Trees Extraction


| Algorithm 2. Two-dimensional region growing algorithm |
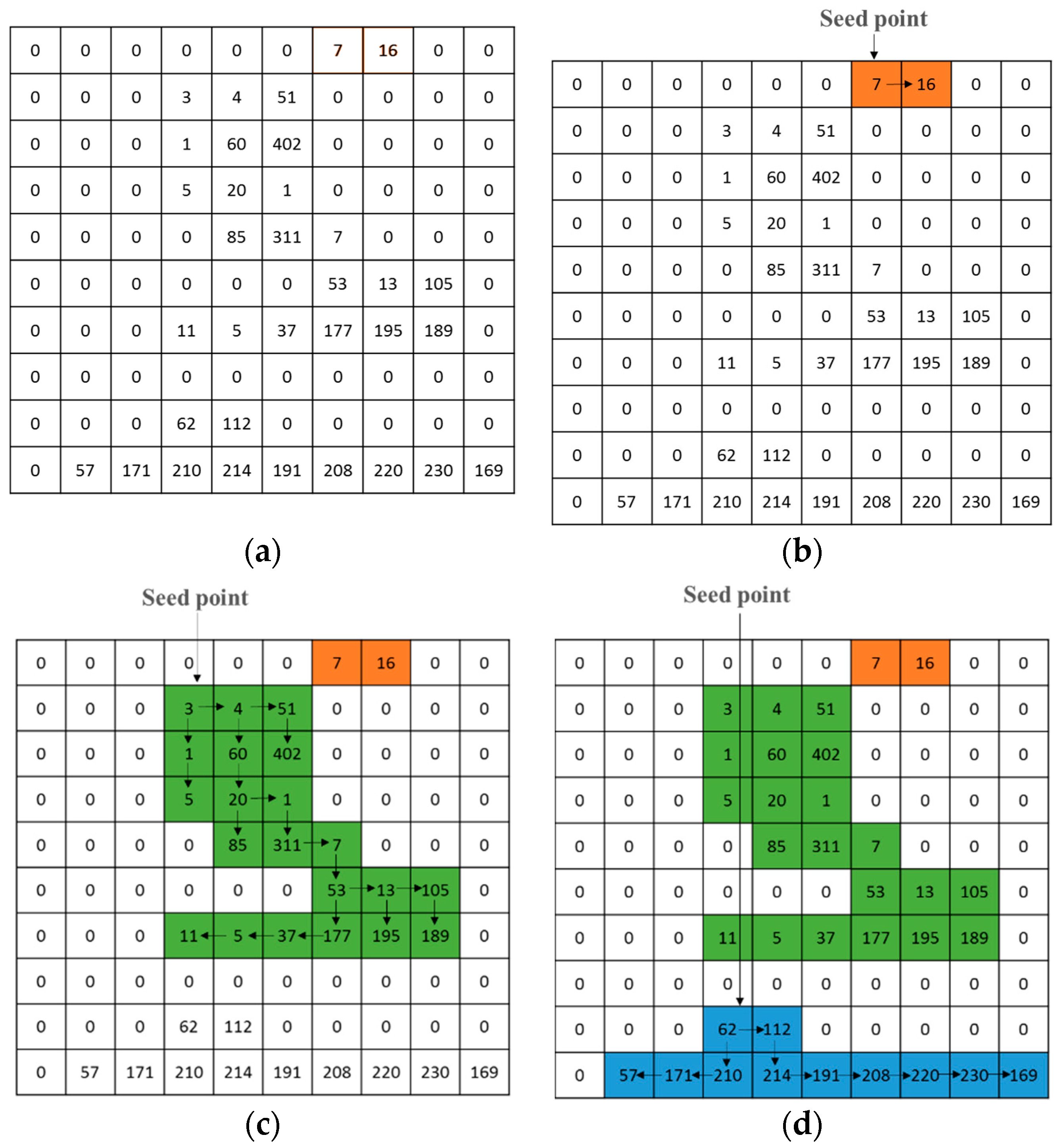
| Input: Ta, a table that records the number of projected points in each grid (Figure 8a). Output: Tb, a table whose cells are clustered into different parts (Figure 8d). |
| 1. Traverse Ta and find an unmarked valid cell, whose value is not zero, and mark the cell as a seed cell. Put the cell into Pseed. 2. Select a cell from Pseed, Si, mark the cell and erase it from Pseed. 3. Search four adjacent cells (in order of up, down, left and right) around Si. If adjacent cells were valid, these cells would be put into Pseed. 4. Loop process 2 to 3 until Pseed is empty, and marked cells would cluster into one part. 5. Go back to process 1 to find a new seed cell, and conduct process 2 to 4 sequentially until all valid cells are marked. 6. Return: Tb. |
3.2. Morphological Parameters of Trees’ Measurements
3.2.1. Tree Height Measurement
3.2.2. Crown Width Measurement
3.2.3. DBH Measurement
3.3. Carbon Sequestration Estimation
3.4. PM2.5 Removal Estimation
4. Results
4.1. Street Trees Extraction
4.2. Morphological Parameters Measurements
4.3. Carbon Sequestration and PM2.5 Removal Estimation
5. Discussion
5.1. Street Trees Extraction
5.2. Morphological Parameters Measurements
5.3. Carbon Sequestration and PM2.5 Removal Estimation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rantzoudi, E.C.; Georgi, J.N. Correlation between the geometrical characteristics of streets and morphological features of trees for the formation of tree lines in the urban design of the city of Orestiada, Greece. Urban Ecosyst. 2017, 20, 1081–1093. [Google Scholar] [CrossRef]
- Nowak, D.J.; Crane, D.E. Carbon storage and sequestration by urban trees in the USA. Environ. Pollut. 2002, 116, 381–389. [Google Scholar] [CrossRef]
- Jim, C.Y. A planning strategy to augment the diversity and biomass of roadside trees in urban Hong Kong. Landsc. Urban Plan. 1999, 44, 13–32. [Google Scholar] [CrossRef]
- Coutts, A.M.; White, E.C.; Tapper, N.J.; Beringer, J.; Livesley, S.J. Temperature and human thermal comfort effects of street trees across three contrasting street canyon environments. Theor. Appl. Climatol. 2016, 124, 55–68. [Google Scholar] [CrossRef]
- Alonzo, M.; Bookhagen, B.; Roberts, D.A. Urban tree species mapping using hyperspectral and lidar data fusion. Remote Sens. Environ. 2014, 148, 70–83. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W.; Ricard, R.; Meng, Q.; Zhang, W. Assessing street-level urban greenery using Google Street View and a modified green view index. Urban For. Urban Green. 2015, 14, 675–685. [Google Scholar] [CrossRef]
- Pauleit, S. Urban street tree plantings: Identifying the key requirements. Proc. Inst. Civ. Eng.-Munic. Eng. 2003, 156, 43–50. [Google Scholar] [CrossRef]
- Seiferling, I.; Naik, N.; Ratti, C.; Proulx, R. Green streets−Quantifying and mapping urban trees with street-level imagery and computer vision. Landsc. Urban Plan. 2017, 165, 93–101. [Google Scholar] [CrossRef]
- Tallis, M.; Taylor, G.; Sinnett, D.; Freer-Smith, P. Estimating the removal of atmospheric particulate pollution by the urban tree canopy of London, under current and future environments. Landsc. Urban Plan. 2011, 103, 129–138. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, B.; Gao, B. Assessing visual green effects of individual urban trees using airborne Lidar data. Sci. Total Environ. 2015, 536, 232–244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dobbs, C.; Escobedo, F.J.; Zipperer, W.C. A framework for developing urban forest ecosystem services and goods indicators. Landsc. Urban Plan. 2011, 99, 196–206. [Google Scholar] [CrossRef]
- Chen, X.; Pei, T.; Zhou, Z.; Teng, M.; He, L.; Luo, M.; Liu, X. Efficiency differences of roadside greenbelts with three configurations in removing coarse particles (PM10): A street scale investigation in Wuhan, China. Urban For. Urban Green. 2015, 14, 354–360. [Google Scholar] [CrossRef]
- Nowak, D.J.; Hirabayashi, S.; Bodine, A.; Hoehn, R. Modeled PM2.5 removal by trees in ten US cities and associated health effects. Environ. Pollut. 2013, 178, 395–402. [Google Scholar] [CrossRef] [PubMed]
- Kiss, M.; Takács, Á.; Pogácsás, R.; Gulyás, Á. The role of ecosystem services in climate and air quality in urban areas: Evaluating carbon sequestration and air pollution removal by street and park trees in Szeged (Hungary). Morav. Geogr. Rep. 2015, 23, 36–46. [Google Scholar] [CrossRef] [Green Version]
- Selmi, W.; Weber, C.; Rivière, E.; Blond, N.; Mehdi, L.; Nowak, D. Air pollution removal by trees in public green spaces in Strasbourg city, France. Urban For. Urban Green. 2016, 17, 192–201. [Google Scholar] [CrossRef] [Green Version]
- Intasen, M.; Hauer, R.J.; Werner, L.P.; Larsen, E. Urban forest assessment in Bangkok, Thailand. J. Sustain. For. 2017, 36, 148–163. [Google Scholar] [CrossRef]
- Nowak, D.J.; Greenfield, E.J.; Hoehn, R.E.; Lapoint, E. Carbon storage and sequestration by trees in urban and community areas of the United States. Environ. Pollut. 2013, 178, 229–236. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nowak, D.J.; Crane, D.E.; Stevens, J.C.; Hoehn, R.E.; Walton, J.T.; Bond, J. A ground-based method of assessing urban forest structure and ecosystem services. Arboric. Urban For. 2008, 34, 347–358. [Google Scholar]
- Singh, K.K.; Chen, G.; McCarter, J.B.; Meentemeyer, R.K. Effects of LiDAR point density and landscape context on estimates of urban forest biomass. ISPRS J. Photogramm. Remote Sens. 2015, 101, 310–322. [Google Scholar] [CrossRef]
- Bouvet, A.; Mermoz, S.; Le Toan, T.; Villard, L.; Mathieu, R.; Naidoo, L.; Asner, G.P. An above-ground biomass map of African savannahs and woodlands at 25m resolution derived from ALOS PALSAR. Remote Sens. Environ. 2018, 206, 156–173. [Google Scholar] [CrossRef]
- Greaves, H.E.; Vierling, L.A.; Eitel, J.U.; Boelman, N.T.; Magney, T.S.; Prager, C.M.; Griffin, K.L. Estimating aboveground biomass and leaf area of low-stature Arctic shrubs with terrestrial LiDAR. Remote Sens. Environ. 2015, 164, 26–35. [Google Scholar] [CrossRef]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H.; et al. Tree mapping using airborne, terrestrial and mobile laser scanning—A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Estornell, J.; Ruiz, L.A.; Velázquez-Martí, B.; López-Cortés, I.; Salazar, D.; Fernández-Sarría, A. Estimation of pruning biomass of olive trees using airborne discrete-return LiDAR data. Biomass Bioenergy 2015, 81, 315–321. [Google Scholar] [CrossRef]
- Lin, C.; Coops, N.C.; Hermosilla, T.; Innes, J.; Dai, J.S.; She, G.H. Using small-footprint discrete and full-waveform airborne lidar metrics to estimate total biomass and biomass components in subtropical forests. Remote Sens. 2014, 6, 7110–7135. [Google Scholar]
- Cao, L.; Gao, S.; Li, P.; Yun, T.; Shen, X.; Ruan, H. Aboveground biomass estimation of individual trees in a coastal planted forest using full-waveform airborne laser scanning data. Remote Sens. 2016, 8, 729. [Google Scholar] [CrossRef]
- Coomes, D.A.; Dalponte, M.; Jucker, T.; Asner, G.P.; Banin, L.F.; Burslem, D.F.; Lewis, S.L.; Nilus, R.; Phillips, O.L.; Phua, M.; et al. Area-based vs tree-centric approaches to mapping forest carbon in Southeast Asian forests from airborne laser scanning data. Remote Sens. Environ. 2017, 194, 77–88. [Google Scholar] [CrossRef]
- Ene, L.T.; Næsset, E.; Gobakken, T.; Mauya, E.W.; Bollandsås, O.M.; Gregoire, T.G.; Ståhl, G.; Zahabu, E. Large-scale estimation of aboveground biomass in miombo woodlands using airborne laser scanning and national forest inventory data. Remote Sens. Environ. 2016, 186, 626–636. [Google Scholar] [CrossRef]
- Matasci, G.; Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W.; Zald, H.S. Large-area mapping of Canadian boreal forest cover, height, biomass and other structural attributes using Landsat composites and lidar plots. Remote Sens. Environ. 2018, 209, 90–106. [Google Scholar] [CrossRef]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual tree biomass estimation using terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 75, 64–75. [Google Scholar] [CrossRef]
- Lin, Y.; Jaakkola, A.; Hyyppä, J.; Kaartinen, H. From TLS to VLS: Biomass estimation at individual tree level. Remote Sens. 2010, 2, 1864–1879. [Google Scholar] [CrossRef]
- Xiao, W.; Vallet, B.; Brédif, M.; Paparoditis, N. Street environment change detection from mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2015, 107, 38–49. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, Y.; Qiu, F. Individual tree segmentation from LiDAR point clouds for urban forest inventory. Remote Sens. 2015, 7, 7892–7913. [Google Scholar] [CrossRef]
- Wang, J.; Lindenbergh, R.; Menenti, M. SigVox–A 3D feature matching algorithm for automatic street object recognition in mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2017, 128, 111–129. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A voxel-based method for automated identification and morphological parameters estimation of individual street trees from mobile laser scanning data. Remote Sens. 2013, 5, 584–611. [Google Scholar] [CrossRef]
- Yang, B.; Dong, Z.; Zhao, G.; Dai, W. Hierarchical extraction of urban objects from mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2015, 99, 45–57. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Maas, H.G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Vastaranta, M.; Holopainen, M.; Viitala, R. Predicting individual tree attributes from airborne laser point clouds based on the random forests technique. ISPRS J. Photogramm. Remote Sens. 2011, 66, 28–37. [Google Scholar] [CrossRef]
- Fitzgibbon, A.; Pilu, M.; Fisher, R.B. Direct least square fitting of ellipses. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 476–480. [Google Scholar] [CrossRef] [Green Version]
- Cao, H.; Yin, S.; Zhang, X.; Xiong, F.; Zhu, P.; Liu, C. Modeled PM2.5 removal by urban forest in Shanghai. J. Shanghai Jiaotong Univ. Agric. Sci. 2016, 34, 76–83. [Google Scholar]
- Nowak, D.J. Estimating leaf area and leaf biomass of open-grown deciduous urban trees. For. Sci. 1996, 42, 504–507. [Google Scholar]
- Li, L.; Li, D.; Zhu, H.; Li, Y. A dual growing method for the automatic extraction of individual trees from mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2016, 120, 37–52. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from terrestrial and mobile lidar data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Lampinen, J.; Kaartinen, H.; Kukko, A.; Puttonen, E.; Hyyppä, H. Object classification and recognition from mobile laser scanning point clouds in a road environment. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1226–1239. [Google Scholar] [CrossRef]
- Lee, J.H.; Ko, Y.; Mcpherson, E.G. The feasibility of remotely sensed data to estimate urban tree dimensions and biomass. Urban For. Urban Green. 2016, 16, 208–220. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Mcfadden, J.P.; Nowak, D.J.; Roberts, D.A. Mapping urban forest structure and function using hyperspectral imagery and lidar data. Urban For. Urban Green. 2016, 17, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Parmher, E.G.; Amati, M.; Taylor, E.J.; Livesley, S.J. Estimation of urban tree canopy cover using random point sampling and remote sensing methods. Urban For. Urban Green. 2016, 20, 160–171. [Google Scholar] [CrossRef]
- Raciti, S.M.; Hutyra, L.R.; Newell, J.D. Mapping carbon storage in urban trees with multi-source remote sensing data: Relationships between biomass, land use, and demographics in Boston neighborhoods. Sci. Total Environ. 2014, 500–501, 72–83. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement distance | 119 m |
| Laser transmitting frequency | 1,010,000 points per second |
| Ranging precision | 0.9 mm @ 50 m |
| Field of view | 360° |
| Panoramic camera | Ladybug/HD camera (optional) |
| Panoramic resolution | 30,000,000/75,000,000 pixels |
| ΔZ | ΔX/ΔY | PA | d |
|---|---|---|---|
| ΔZ > 1.3 m | 0.5 < ΔX/ΔY < 1.5 | 60 < PA < 300 | (SW/2-1) m< d <(SW/2+1) m |
| Tree Species | Wind Speed (m·s−1) | ||
|---|---|---|---|
| 3 | 6 | 8.5 | |
| Cinnamomum camphor (L.) Presl | 0.03 | 0.06 | 0.16 |
| Acer mono Maxim. | 0.042 | 0.197 | 0.344 |
| Platanus acerifolia | 0.25 | 0.63 | 1.19 |
| Sapindus mukurossi Gaertn | 0.25 | 0.63 | 1.19 |
| Streets | Grid Size (m) | Layer Spacing (m) | Number of Classes |
|---|---|---|---|
| Bihua St. | 4 × 4 | 1 | 3 |
| Shuangxia St. | 4 × 4 | 1 | 3 |
| Taihu St. | 5 × 5 | 2 | 4 |
| Results | Extracted Street Trees | Omitted Street Trees | Extracted Other Ground Objects | Completeness Rate | Correctness Rate | |
|---|---|---|---|---|---|---|
| Streets | ||||||
| Bihua St. | 46 | 1 | 4 | 97.9% | 92% | |
| Shuangxia St. | 61 | 1 | 1 | 98.4% | 98.4% | |
| Taihu St. | 41 | 0 | 3 | 100% | 93.2% | |
| Parameters | Tree Height (m) | Crown Width (m) | DBH (cm) | ||||
|---|---|---|---|---|---|---|---|
| Streets | RMSE | Mean Error | RMSE | Mean Error | RMSE | Mean Error | |
| Bihua St. | 0.12 | −0.08 | 0.24 | −0.14 | 2.12 | −1.10 | |
| Shuangxia St. | 0.11 | 0.10 | 0.26 | −0.01 | 1.95 | −0.31 | |
| Taihu St. | 0.17 | −0.03 | 0.37 | −0.05 | 1.85 | −0.32 | |
| Date | 4.1 | 4.3 | 4.8 | 4.9 | 4.10 | 4.11 | 4.14 | 4.15 | 4.16 | 4.17 |
| PM2.5 concentration (μg·m−3) | 75 | 54 | 37 | 36 | 44 | 52 | 59 | 77 | 75 | 31 |
| Wind speed (m·s−1) | 6 | 3 | 3 | 3 | 3 | 3 | 8.5 | 6 | 6 | 8.5 |
| Date | 4.20 | 4.21 | 4.22 | 4.23 | 4.24 | 4.25 | 4.26 | 4.27 | 4.29 | 4.30 |
| PM2.5 concentration (μg·m−3) | 38 | 52 | 89 | 90 | 79 | 103 | 66 | 51 | 27 | 61 |
| Wind speed (m·s−1) | 8.5 | 3 | 3 | 3 | 3 | 3 | 6 | 8.5 | 3 | 3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Hu, Q.; Li, H.; Wang, S.; Ai, M. Evaluating Carbon Sequestration and PM2.5 Removal of Urban Street Trees Using Mobile Laser Scanning Data. Remote Sens. 2018, 10, 1759. https://doi.org/10.3390/rs10111759
Zhao Y, Hu Q, Li H, Wang S, Ai M. Evaluating Carbon Sequestration and PM2.5 Removal of Urban Street Trees Using Mobile Laser Scanning Data. Remote Sensing. 2018; 10(11):1759. https://doi.org/10.3390/rs10111759
Chicago/Turabian StyleZhao, Yingyi, Qingwu Hu, Haidong Li, Shaohua Wang, and Mingyao Ai. 2018. "Evaluating Carbon Sequestration and PM2.5 Removal of Urban Street Trees Using Mobile Laser Scanning Data" Remote Sensing 10, no. 11: 1759. https://doi.org/10.3390/rs10111759
APA StyleZhao, Y., Hu, Q., Li, H., Wang, S., & Ai, M. (2018). Evaluating Carbon Sequestration and PM2.5 Removal of Urban Street Trees Using Mobile Laser Scanning Data. Remote Sensing, 10(11), 1759. https://doi.org/10.3390/rs10111759