Defining a Trade-off Between Spatial and Temporal Resolution of a Geosynchronous SAR Mission for Soil Moisture Monitoring


Abstract
:
1. Introduction
2. Study Area and Materials
2.1. Study Area
2.2. Data and Hydrological Model
3. Method
3.1. Assimilation Algorithm
3.2. Experiment Design
- (1)
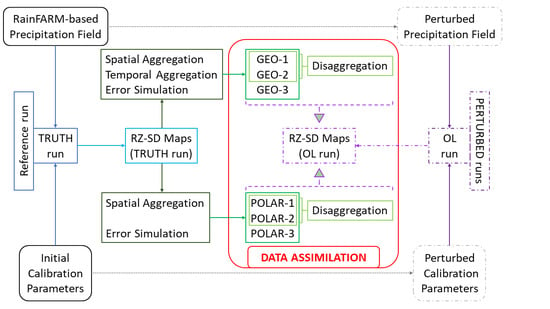
- Initially, a ‘reference’ model simulation was produced by running the Continuum model using the RainFARM-based high-resolution precipitation field as one of the inputs (this is the TRUTH run). The model calibration parameters were those operatively used by DPC in the national implementation of the Continuum model, and the results were assumed as the ‘truth’.
- (2)
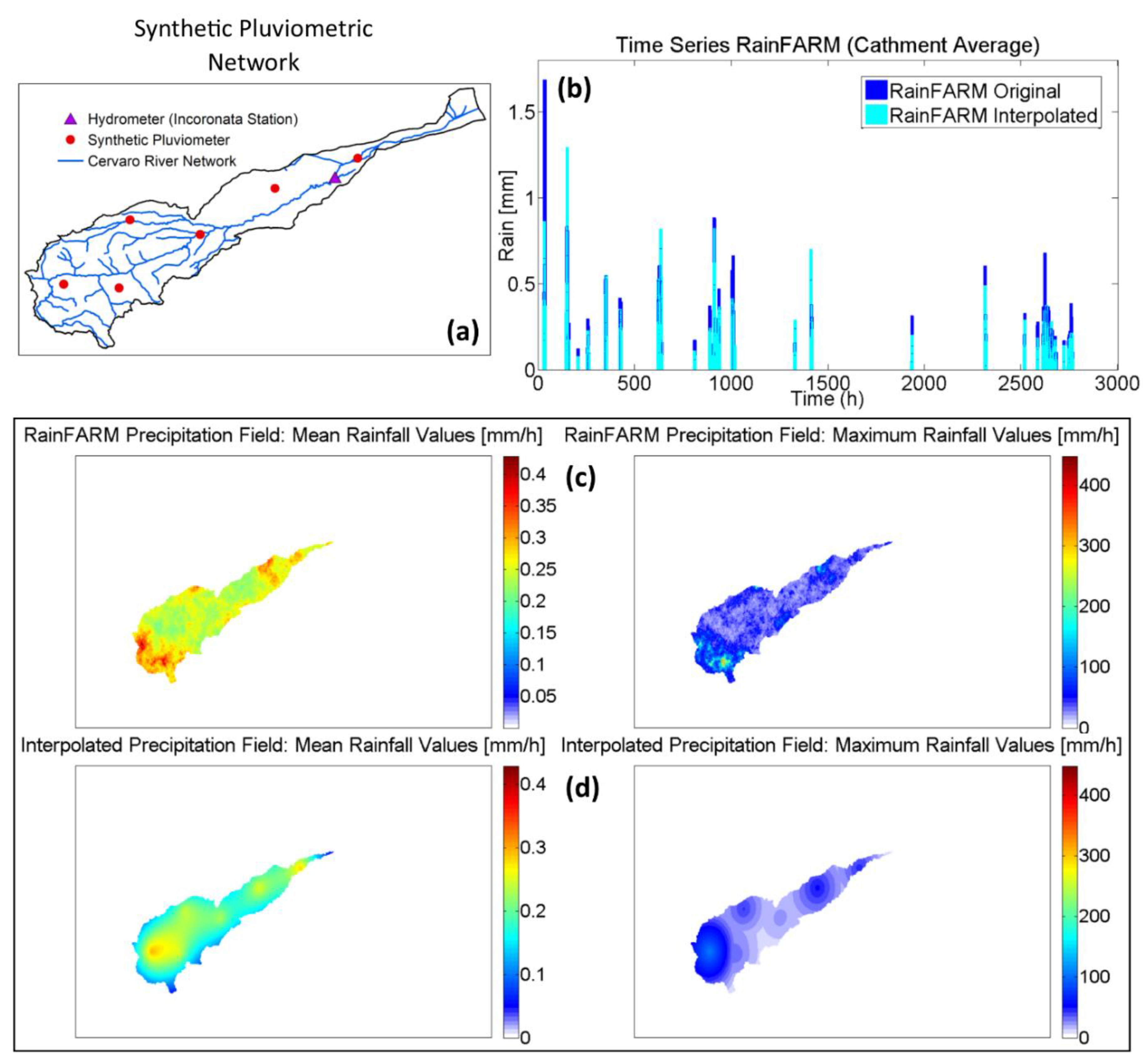
- The TRUTH model settings were then modified (leading to the so-called PERTURBED runs) by using perturbed precipitation fields and calibration parameters. Rainfall data were perturbed by simulating a network of synthetic pluviometers that were randomly and uniformly distributed in the catchment (Figure 4a). The RainFARM-based precipitation field was sampled at the rain gauges location, and the samples were then interpolated using the Kriging algorithm. This approach was adopted to generate a realistic precipitation field, affected by the same errors that very likely occur when interpolating data collected by pluviometers. This often produces an incorrect estimation of rainfall volume (most of the time, the precipitation field is underestimated), as well as an incorrect spatial distribution of the precipitation patterns. Figure 4b shows how the first error was actually simulated in the perturbed precipitation field. In the figure, the time series of the catchment average value of the RainFARM-based precipitation field is compared against the time series of the catchment average value of the perturbed one. In Figure 4c,d, instead, the maps that compare the mean and the maximum values of the two precipitation fields are reported. In addition to the underestimation error (already discussed), these maps show the different rainfall spatial pattern. Since hydrological simulations are also affected by modelling errors, the PERTURBED runs were also executed with a set of slightly different calibration parameters (with respect to the TRUTH run). The latter were obtained by randomly perturbing the two sub-surface flow calibration parameters of Continuum model (i.e., the parameters that are likely to be mostly affected by SM-DA) within their physically admissible range (perturbed calibration parameters: Uc = 20; Uh = 0.6; Ct = 0.42; Cf = 0.057; VWmax = 1000; Rf = 5).
- (3)
- Afterwards, the RZ-SD maps generated by the TRUTH run (hereinafter defined TRUTH SM Maps, and characterized by a SpR of 100 m a TeR of 1 h) were used to simulate the observations collected by the GEO SAR and the POLAR SAR systems.
- (a)
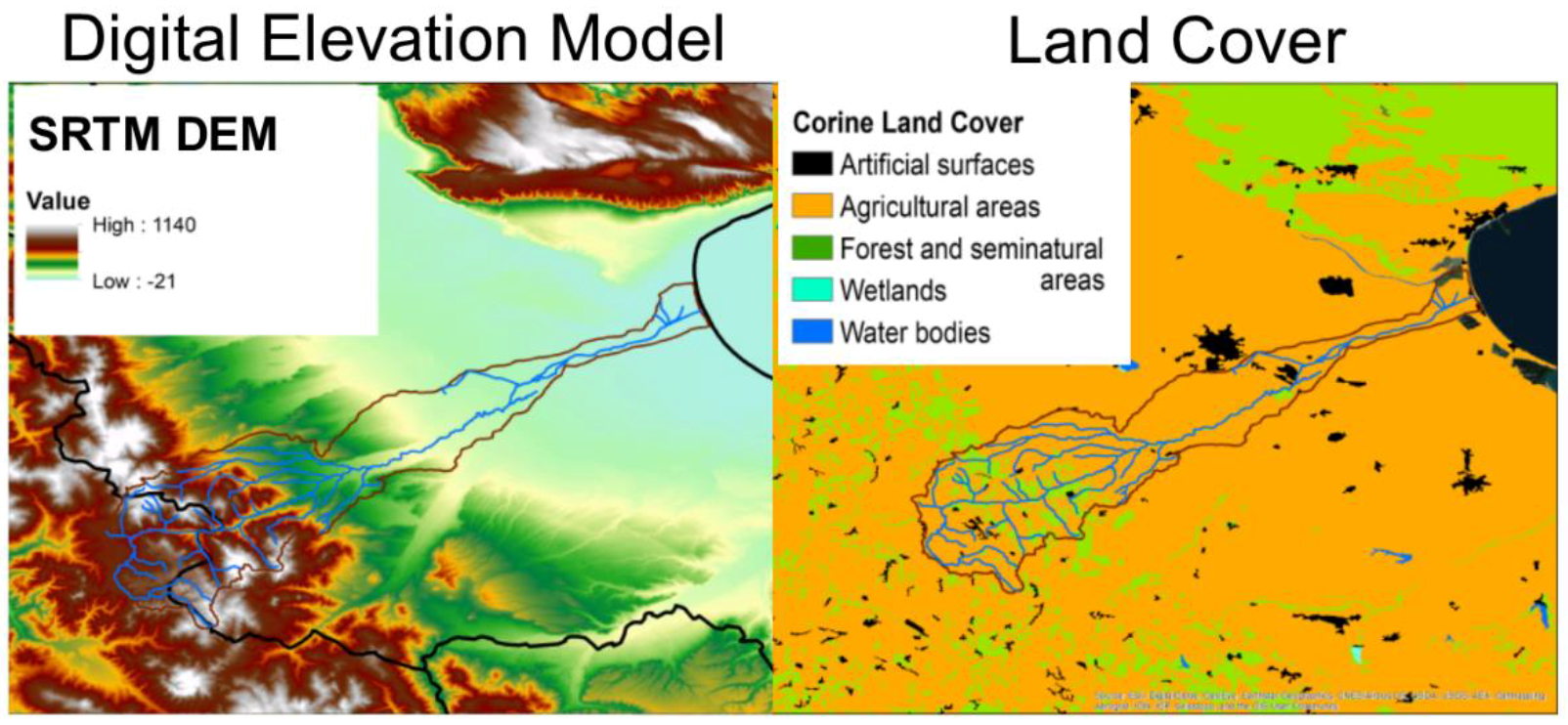
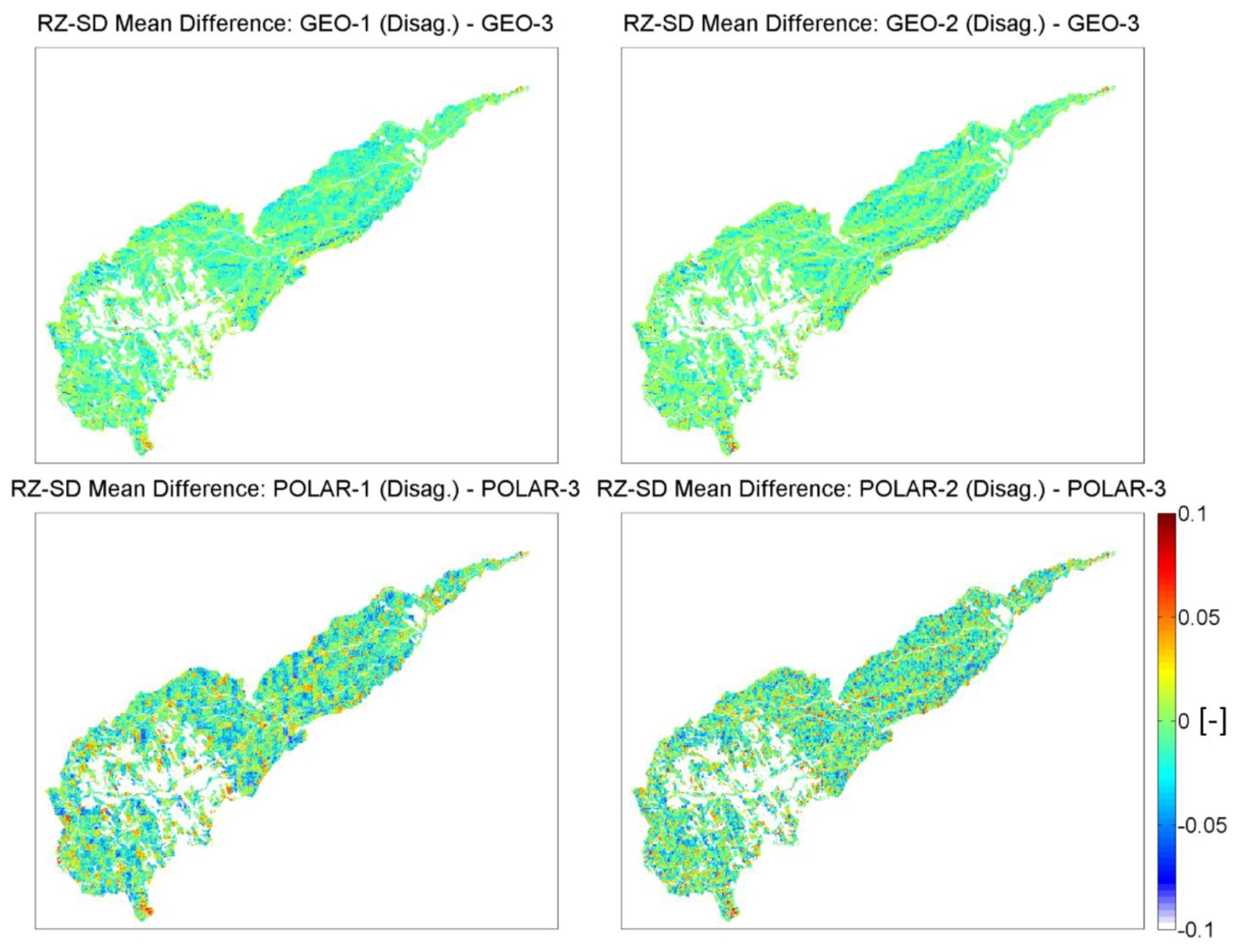
- In order to generate the GEO SAR-like SM products, the TRUTH SM Maps were spatially and temporally aggregated according to the GEO SAR products specifications reported in Table 1. It must be considered that a GEO SAR system is expected to acquire data through two time windows per day of 8 h each, preceded and followed by 2 h without acquisitions. This is because the relative speed of the satellite and the Earth surface is very small at the extreme of the synthetic antenna length, when the satellite goes back to acquire another image. For each time-window, eight GEO-1 images, four GEO-2 images and one GEO-3 image are produced. GEO-1 and GEO-2 were obtained by averaging over 4 × 4 and 8 × 8 pixels of the RZ-SD maps of the TRUTH run (that has a SpR of 100 m), respectively. The results were then divided by the average of the values, computed over the same block of pixels, to obtain the final RZ-SD maps at the desired resolution. This spatial filter was not required to produce GEO-3, which has the same SpR of TRUTH SM maps. Concerning the temporal aggregation, to account for the time required to collect the synthetic antenna, GEO-2 and GEO-3 were obtained by averaging in the temporal domain the values produced by the TRUTH run over a time interval of, respectively, 2 and 8 h. This temporal filter was not required to produce GEO-1, which has the same TeR as the TRUTH SM Maps. After the spatio-temporal aggregation, the three GEO SAR products were perturbed by adding a white Gaussian noise to simulate the expected instrumental/retrieval error [40]. Considering that an error standard deviation of SM in the order of 0.06–0.09 m3/m3 [13,14] is generally expected for SAR retrieval over sparsely vegetated areas, a standard deviation of 0.07 m3/m3 was used in our synthetic experiment. Since the soil of the study area is classified as clay and sandy clay loam [63], an average (and constant) value of porosity equal to 0.45 was used for the whole catchment [64]. Therefore, the SM error of 0.07 m3/m3 translated into a value of 0.156 in terms of SD. Afterwards, the portions of the catchment where the retrieval from a SAR sensor was not feasible were masked out to simulate the actual retrieval capability of a SAR system. The mask was derived by combining the information from the 2012 Corine Land Cover and the SRTM DEM. Following Reference [20], masked pixels correspond to urban areas, forests, water bodies and pixels whose slope is >15°.It must be considered that, amongst the synthetic observations, only the GEO-3 product has a SpR coincident with the one of the Continuum model and, therefore, could be assimilated without further data processing. Concerning the other observations (i.e., the GEO-1, GEO-2, products) a simple disaggregation strategy, based on the proportion shown in Equation (2), was applied to disaggregate them to 100 m before carrying out the assimilation. This step was required for enabling the assimilation of the observations over the model grid space.where represents the SD disaggregated (SpR 100 m) value of each pixel of a GEO SAR map, at a given instant of time ; represents the SD value of each aggregated (SpR 400 m and 800 m) pixel of a GEO SAR map, at a given time instant ; and represent the mean SD values, computed over the investigated period, for each pixel of the OL run with a SpR of, respectively, 100 m, 400 m and 800 m. The maps of the OL run at coarser SpR were generated by applying the same algorithms of spatial aggregation previously described.Example of GEO SAR-like SM maps, before and after the disaggregation process, are shown in Figure 5, as opposed to the corresponding maps of the TRUTH and the OL runs. From the figure it can be observed that, on the one hand, during the generation of the GEO-1 and GEO-2 products, the process of spatial averaging blurred the details of the hydrological network. On the other hand, such details were re-emphasized by the disaggregation process.
- (b)
- Concerning the POLAR SAR-like SM products (hereinafter defined POLAR-1, POLAR-2 and POLAR-3), they were initially produced with a SpR equal to the one of the GEO SAR simulated data (i.e., 800 m, 400 m, 100 m), and a TeR equal to the one of Sentinel 1 constellation. In line with this aim, the real acquisition times of S1-A and S1-B over the Cervaro River Catchment were used to set the TeR of the POLAR SAR observations (Table 2 and Table 3). The hourly TRUTH SM Maps corresponding to the acquisition time of S1 images were thus used for generating the POLAR SAR-like SM products, by applying the same approach used to generate the GEO SAR observations. The only difference was that the temporal aggregation step was not needed (i.e., S1 acquisition can be considered almost ‘instantaneous’), and so the TRUTH SM Maps were only averaged in space and perturbed (with an error standard deviation of 0.07 m3/m3) in order to simulate the instrumental/retrieval error.Subsequently, the POLAR-1 and the POLAR-2 products were disaggregated to 100 m to match the same SpR of the model grid by using the proportion shown in Equation (2).
- (4)
- Finally, the GEO SAR and the POLAR SAR-like SM products (at 100 m SpR) were assimilated into the PERTURBED runs of the Continuum model by using the Nudging assimilation algorithm (Equation (1)). In each time window of 8 h, when the GEO SAR sensor is expected to acquire data, GEO-1 Disaggregated products were assimilated with hourly frequency, whereas GEO-2 Disaggregated and GEO-3 products were assimilated in the middle of the temporal window used for averaging data over time (i.e., 1 h and 4 h after window start for GEO-2 and GEO-3, respectively). The POLAR-1 Disaggregated, POLAR-2 Disaggregated and POLAR-3 products were instead assimilated at the time of the S1 overpass.
4. Results
- Indirect: by analyzing the impact of the assimilation on model discharge predictions.
- Direct: by analyzing the impact of the assimilation on modelled SM state estimates.
- -
- Qs is a generic term representing the simulated discharges (QDA represents those simulated by means of DA techniques, whereas QOL represents those simulated by means of the OL runs)
- -
- QO is the discharge simulated by the TRUTH run
- -
- is the mean of the discharge simulated by the TRUTH run
- -
- ‘n’ is the number of model time steps (1 h) in the simulation period
- -
- RZSDs is a generic term representing the simulated RZ-SD values for the runs with (SM-DA) and without (OL) the assimilation.
- -
- RZSDO are the RZ-SD values simulated by the TRUTH run
- -
- ‘n’ is the number of model time steps (1 h) in the simulation period
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Acronyms
| AMSR2 | Advanced Microwave Scanning Radiometer 2 |
| ASCAT | Advanced SCATterometer |
| DA | Data Assimilation |
| DEM | Digital Elevation Model |
| DI | Direct Insertion |
| DPC | Italian Civil Protection Department |
| EE | Earth Explorer |
| Eff | Efficiency of assimilation |
| EO | Earth Observation |
| ESA | European Space Agency |
| G | Gain |
| G-CLASS | Geosynchronous—Continental Land-Atmosphere Sensing System |
| GEO SAR | Geosynchronous Synthetic Aperture Radar |
| IDW | Inverse Distance Weighting |
| ISPRA | Istituto Superiore per la Protezione e la Ricerca Ambientale |
| LST | Land Surface Temperature |
| NER | Normalized Error Reduction (computed for discharge values) |
| NERSM | Normalized Error Reduction (computed for soil moisture values) |
| NS | Nash-Sutcliffe efficiency coefficient |
| OL | Open Loop |
| POLAR SAR | Synthetic Aperture Radar Sensor Carried by a Satellite Flying on a Quasi-Polar Orbit |
| PV | Percent Variation |
| RainFARM | Rainfall Filtered Autoregressive Model |
| RMSE | Root Mean Squared Error |
| RZ | Root Zone |
| RZ-SD | Root Zone Saturation Degree |
| S1 | Sentinel 1 |
| SAR | Synthetic Aperture Radar |
| SD | Saturation Degree |
| SM | Soil Moisture |
| SMAP | Soil Moisture Active Passive |
| SM-DA | Soil Moisture Data Assimilation |
| SMOS | Soil Moisture and Ocean Salinity |
| SpR | Spatial Resolution |
| SRTM | Soil Moisture and Ocean Salinity |
| TeR | Temporal Resolution |
References
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture-climate interactions in a changing climate: A review. Earth-Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Peng, J.; Loew, A.; Merlin, O.; Verhoest, N.E.C. A review of spatial downscaling of satellite remotely sensed soil moisture. Rev. Geophys. 2017, 55, 341–366. [Google Scholar] [CrossRef] [Green Version]
- Brocca, L.; Ciabatta, L.; Massari, C.; Camici, S.; Tarpanelli, A. Soil Moisture for Hydrological Applications: Open Questions and New Opportunities. Water 2017, 9, 140. [Google Scholar] [CrossRef]
- Entekhabi, B.D.; Njoku, E.G.; Neill, P.E.O.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Cenci, L.; Laiolo, P.; Gabellani, S.; Campo, L.; Silvestro, F.; Delogu, F.; Boni, G.; Rudari, R. Assimilation of H-SAF Soil Moisture Products for Flash Flood Early Warning Systems. Case Study: Mediterranean Catchments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5634–5646. [Google Scholar] [CrossRef]
- He, L.; Chen, J.M.; Liu, J.; Bélair, S.; Luo, X. Assessment of SMAP soil moisture for global simulation of gross primary production. J. Geophys. Res. Biogeosci. 2017, 122, 1549–1563. [Google Scholar] [CrossRef]
- Rosenbaum, U.; Bogena, H.R.; Herbst, M.; Huisman, J.A.; Peterson, T.J.; Weuthen, A.; Western, A.W.; Vereecken, H. Seasonal and event dynamics of spatial soil moisture patterns at the small catchment scale. Water Resour. Res. 2012, 48, 1–22. [Google Scholar] [CrossRef]
- Brocca, L.; Crow, W.T.; Ciabatta, L.; Massari, C.; de Rosnay, P.; Enenkel, M.; Hahn, S.; Amarnath, G.; Camici, S.; Tarpanelli, A.; et al. A Review of the Applications of ASCAT Soil Moisture Products. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2285–2306. [Google Scholar] [CrossRef]
- Dingman, S.L. Physical Hydrology, 2nd ed.; Waveland Press, Inc.: Long Grove, IL, USA, 2002. [Google Scholar]
- Wagner, W.; Blöschl, G.; Pampaloni, P.; Calvet, J.-C.; Bizzarri, B.; Wigneron, J.-P.; Kerr, Y. Operational readiness of microwave remote sensing of soil moisture for hydrologic applications. Nord. Hydrol. 2007, 38, 1. [Google Scholar] [CrossRef]
- Davie, T. Fundamentals of Hydrology, 2nd ed.; Routledge, Taylor & Francis e-Library: Abingdon, UK, 2008; Volume 298, ISBN 0203933664. [Google Scholar]
- Petropoulos, G.P.; Ireland, G.; Barrett, B. Surface soil moisture retrievals from remote sensing: Current status, products & future trends. Phys. Chem. Earth 2015, 83–84, 36–56. [Google Scholar] [CrossRef]
- Gao, Q.; Zribi, M.; Escorihuela, M.J.; Baghdadi, N. Synergetic use of sentinel-1 and sentinel-2 data for soil moisture mapping at 100 m resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef] [PubMed]
- Pulvirenti, L.; Squicciarino, G.; Cenci, L.; Boni, G.; Pierdicca, N.; Chini, M.; Versace, C.; Campanella, P. A surface soil moisture mapping service at national (Italian) scale based on Sentinel-1 data. Environ. Model. Softw. 2018, 102, 13–28. [Google Scholar] [CrossRef]
- Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic Use of Sentinel-1 and Sentinel-2 Images for Operational Soil Moisture Mapping at High Spatial Resolution over Agricultural Areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward Global Soil Moisture Monitoring with Sentinel-1: Harnessing Assets and Overcoming Obstacles. IEEE Trans. Geosci. Remote Sens. 2018, PP, 1–20. [Google Scholar] [CrossRef]
- Cenci, L. Soil Moisture-Data Assimilation for Improving Flash Flood Predictions in Mediterranean Catchments. Case Study: ASCAT and Sentinel 1 Derived Products. Ph.D. Thesis, Scuola Universitaria Superiore IUSS Pavia, Pavia, Italy, 2016; p. 123. [Google Scholar]
- Cenci, L.; Pulvirenti, L.; Boni, G.; Chini, M.; Matgen, P.; Gabellani, S.; Campo, L.; Silvestro, F.; Versace, C.; Campanella, P.; et al. Satellite soil moisture assimilation: Preliminary assessment of the sentinel 1 potentialities. In Proceedings of the 2016 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3098–3101. [Google Scholar] [CrossRef]
- Cenci, L.; Pulvirenti, L.; Boni, G.; Chini, M.; Matgen, P.; Gabellani, S.; Squicciarino, G.; Basso, V.; Pignone, F.; Pierdicca, N. Exploiting Sentinel 1 data for improving (flash) flood modelling via data assimilation techniques. In Proceedings of the 2017 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4939–4942. [Google Scholar] [CrossRef]
- Cenci, L.; Pulvirenti, L.; Boni, G.; Chini, M.; Matgen, P.; Gabellani, S.; Squicciarino, G.; Pierdicca, N. An evaluation of the potential of Sentinel 1 for improving flash flood predictions via soil moisture–data assimilation. Adv. Geosci. 2017, 44, 89–100. [Google Scholar] [CrossRef] [Green Version]
- Lievens, H.; Reichle, R.H.; Liu, Q.; De Lannoy, G.J.M.; Dunbar, R.S.; Kim, S.B.; Das, N.N.; Cosh, M.; Walker, J.P.; Wagner, W. Joint Sentinel-1 and SMAP data assimilation to improve soil moisture estimates. Geophys. Res. Lett. 2017, 6145–6153. [Google Scholar] [CrossRef]
- Alexakis, D.D.; Mexis, F.D.K.; Vozinaki, A.E.K.; Daliakopoulos, I.N.; Tsanis, I.K. Soil moisture content estimation based on Sentinel-1 and auxiliary earth observation products. A hydrological approach. Sensors 2017, 17, 1455. [Google Scholar] [CrossRef]
- Dorigo, W.; Wagner, W.; Albergel, C.; Albrecht, F.; Balsamo, G.; Brocca, L.; Chung, D.; Ertl, M.; Forkel, M.; Gruber, A.; et al. ESA CCI Soil Moisture for improved Earth system understanding: State-of-the art and future directions. Remote Sens. Environ. 2017, 203, 185–215. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Paulik, C.; Hochstöger, S.; Mistelbauer, T.; Modanesi, S.; Ciabatta, L.; Massari, C.; Brocca, L.; Wagner, W. Soil moisture from fusion of scatterometer and SAR: Closing the scale gap with temporal filtering. Remote Sens. 2018, 10, 1030. [Google Scholar] [CrossRef]
- Hobbs, S.; Mitchell, C.; Forte, B.; Holley, R.; Snapir, B.; Whittaker, P. System design for geosynchronous synthetic aperture radar missions. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7750–7763. [Google Scholar] [CrossRef]
- Hobbs, S.; Guarnieri, A.M.; Wadge, G.; Schulz, D. GeoSTARe initial mission design. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 92–95. [Google Scholar] [CrossRef]
- Li, Y.; Guarnieri, A.M.; Hu, C.; Rocca, F. Performance and requirements of GEO SAR systems in the presence of Radio Frequency Interferences. Remote Sens. 2018, 10, 82. [Google Scholar] [CrossRef]
- Cenci, L.; Boni, G.; Pulvirenti, L.; Pignone, F.; Masoero, A.; Basso, V.; Gabellani, S.; Pierdicca, N. Spatio-temporal requirements of a geosynchronous SAR soil moisture product for hydrological applications. In Proceedings of the 2018 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 22–27 July 2018; pp. 5521–5524. [Google Scholar] [CrossRef]
- Walker, J.P.; Houser, P.R. Hydrologic Data Assimilation. In Advances in Water Science Methodologies; Aswathanarayana, U., Ed.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2005. [Google Scholar] [Green Version]
- Liu, Y.; Weerts, A.H.; Clark, M.; Hendricks Franssen, H.J.; Kumar, S.; Moradkhani, H.; Seo, D.J.; Schwanenberg, D.; Smith, P.; Van Dijk, A.I.J.M.; et al. Advancing data assimilation in operational hydrologic forecasting: Progresses, challenges, and emerging opportunities. Hydrol. Earth Syst. Sci. 2012, 16, 3863–3887. [Google Scholar] [CrossRef] [Green Version]
- Lahoz, W.A.; Schneider, P. Data assimilation: Making sense of Earth Observation. Front. Environ. Sci. 2014, 2, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Brocca, L.; Melone, F.; Moramarco, T.; Wagner, W.; Naeimi, V.; Bartalis, Z.; Hasenauer, S. Improving runoff prediction through the assimilation of the ASCAT soil moisture product. Hydrol. Earth Syst. Sci. 2010, 14, 1881–1893. [Google Scholar] [CrossRef] [Green Version]
- Dharssi, I.; Bovis, K.J.; Macpherson, B.; Jones, C.P. Operational assimilation of ASCAT surface soil wetness at the Met Office. Hydrol. Earth Syst. Sci. 2011, 15, 2729–2746. [Google Scholar] [CrossRef] [Green Version]
- Brocca, L.; Moramarco, T.; Melone, F.; Wagner, W.; Hasenauer, S.; Hahn, S. Assimilation of Surface- and Root-Zone ASCAT Soil Moisture Products Into Rainfall—Runoff Modeling. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2542–2555. [Google Scholar] [CrossRef]
- Massari, C.; Brocca, L.; Tarpanelli, A.; Moramarco, T. Data Assimilation of Satellite Soil Moisture into Rainfall-Runoff Modelling: A Complex Recipe? Remote Sens. 2015, 7, 11403–11433. [Google Scholar] [CrossRef] [Green Version]
- Massari, C.; Brocca, L.; Ciabatta, L.; Moramarco, T.; Gabellani, S.; Albergel, C.; De Rosnay, P.; Puca, S.; Wagner, W. The Use of H-SAF Soil Moisture Products for Operational Hydrology: Flood Modelling over Italy. Hydrology 2015, 2, 2–22. [Google Scholar] [CrossRef] [Green Version]
- Matgen, P.; Fenicia, F.; Heitz, S.; Plaza, D.; de Keyser, R.; Pauwels, V.R.N.; Wagner, W.; Savenije, H. Can ASCAT-derived soil wetness indices reduce predictive uncertainty in well-gauged areas? A comparison with in situ observed soil moisture in an assimilation application. Adv. Water Resour. 2012, 44, 49–65. [Google Scholar] [CrossRef]
- Laiolo, P.; Gabellani, S.; Campo, L.; Silvestro, F.; Delogu, F.; Rudari, R.; Pulvirenti, L.; Boni, G.; Fascetti, F.; Pierdicca, N.; et al. Impact of different satellite soil moisture products on the predictions of a continuous distributed hydrological model. Int. J. Appl. Earth Obs. Geoinf. 2015, 48, 131–145. [Google Scholar] [CrossRef]
- Laiolo, P.; Gabellani, S.; Campo, L.; Cenci, L.; Silvestro, F.; Delogu, F.; Boni, G.; Rudari, R.; Puca, S.; Pisani, A.R. Assimilation of remote sensing observations into a continuous distributed hydrological model: Impacts on the hydrologic cycle. In Proceedings of the 2015 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1308–1311. [Google Scholar] [CrossRef]
- Walker, J.P.; Houser, P.R. Requirements of a global near-surface soil moisture satellite mission: Accuracy, repeat time, and spatial resolution. Adv. Water Resour. 2004, 27, 785–801. [Google Scholar] [CrossRef]
- Schmugge, T.J.; Kustas, W.P.; Ritchie, J.C.; Jackson, T.J.; Rango, A. Remote Sensing in Hydrology. Adv. Water Resour. 2002, 25, 1367–1385. [Google Scholar] [CrossRef]
- Jackson, T.J. Estimation of surface soil moisture using microwave sensors. Encycl. Hydrol. Sci. 2006, 799–810. [Google Scholar] [CrossRef]
- Barrett, B.W.; Dwyer, E.; Whelan, P. Soil moisture retrieval from active spaceborne microwave observations: An evaluation of current techniques. Remote Sens. 2009, 1, 210–242. [Google Scholar] [CrossRef]
- Houser, P.R.; De Lannoy, G.J.M.; Walker, J.P. Hydrologic Data Assimilation. In Approaches to Managing Disaster—Assessing Hazards, Emergencies and Disaster Impacts; Tiefenbacher, J., Ed.; InTech: Rijeka, Croatia, 2012; pp. 41–64. ISBN 978-953-51-0294-6. [Google Scholar]
- Brocca, L.; Melone, F.; Moramarco, T.; Wagner, W.; Albergel, C. Scaling and Filtering Approaches for the Use of Satellite Soil Moisture Observations. In Remote Sensing of Energy Fluxes and Soil Moisture Content; Petropoulos, G.P., Ed.; CRC Press: Boca Raton, FL, USA, 2013; pp. 415–430. ISBN 978-1-4665-0578-0. [Google Scholar]
- Drusch, M. Observation operators for the direct assimilation of TRMM microwave imager retrieved soil moisture. Geophys. Res. Lett. 2005, 32, L15403. [Google Scholar] [CrossRef]
- Yilmaz, M.T.; Crow, W.T. The Optimality of Potential Rescaling Approaches in Land Data Assimilation. J. Hydrometeorol. 2013, 14, 650–660. [Google Scholar] [CrossRef]
- Wei, M.Y. Soil Moisture: Report of a Workshop held in Tiburon, California 25–27 January 1994; NASA Conference Publication 3319; NASA: Washington, DC, USA, November 1995. [Google Scholar]
- Wagner, W.; Lemoine, G.; Rott, H. A method for estimating soil moisture from ERS Scatterometer and soil data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Ragab, R. Towards a continuous operational system to estimate the root-zone soil moisture from intermittent remotely sensed surface moisture. J. Hydrol. 1995, 173, 1–25. [Google Scholar] [CrossRef]
- Albergel, C.; Rüdiger, C.; Pellarin, T.; Calvet, J.-C.; Fritz, N.; Froissard, F.; Suquia, D.; Petitpa, A.; Piguet, B.; Martin, E. From near-surface to root-zone soil moisture using an exponential filter: An assessment of the method based on in-situ observations and model simulations. Hydrol. Earth Syst. Sci. 2008, 12, 1323–1337. [Google Scholar] [CrossRef]
- Manfreda, S.; Brocca, L.; Moramarco, T.; Melone, F.; Sheffield, J. A physically based approach for the estimation of root-zone soil moisture from surface measurements. Hydrol. Earth Syst. Sci. 2014, 18, 1199–1212. [Google Scholar] [CrossRef] [Green Version]
- Dee, D.P. Bias and data assimilation. Q. J. R. Meteorol. Soc. 2006, 131, 3323–3343. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D. Bias reduction in short records of satellite soil moisture. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef] [Green Version]
- WMO Observing Systems Capability Analysis and Review Tool (OSCAR)—World Meteorological Organization. Available online: https://www.wmo-sat.info/oscar/ (accessed on 11 August 2018).
- Apollonio, C.; Balacco, G.; Novelli, A.; Tarantino, E.; Piccinni, A. Land Use Change Impact on Flooding Areas: The Case Study of Cervaro Basin (Italy). Sustainability 2016, 8, 996. [Google Scholar] [CrossRef]
- ISPRA Catchments. Available online: http://www.sinanet.isprambiente.it/it/sia-ispra/download-mais/bacini-idrografici-principali-1-250.000/view (accessed on 24 August 2018).
- Silvestro, F.; Gabellani, S.; Delogu, F.; Rudari, R.; Boni, G. Exploiting remote sensing land surface temperature in distributed hydrological modelling: The example of the Continuum model. Hydrol. Earth Syst. Sci. 2013, 17, 39–62. [Google Scholar] [CrossRef]
- Silvestro, F.; Gabellani, S.; Rudari, R.; Delogu, F.; Laiolo, P.; Boni, G. Uncertainty reduction and parameters estimation of a distributed hydrological model with ground and remote sensing data. Hydrol. Earth Syst. Sci. 2015, 19, 1727–1751. [Google Scholar] [CrossRef]
- Rebora, N.; Ferraris, L.; von Hardenberg, J.; Provenzale, A. RainFARM: Rainfall Downscaling by a Filtered Autoregressive Model. J. Hydrometeorol. 2006, 7, 724–738. [Google Scholar] [CrossRef]
- Scipal, K.; Drusch, M.; Wagner, W. Assimilation of a ERS scatterometer derived soil moisture index in the ECMWF numerical weather prediction system. Adv. Water Resour. 2008, 31, 1101–1112. [Google Scholar] [CrossRef]
- Wagner, W.; Hahn, S.; Kidd, R.; Melzer, T.; Bartalis, Z.; Hasenauer, S.; Figa-Saldaña, J.; De Rosnay, P.; Jann, A.; Schneider, S.; et al. The ASCAT soil moisture product: A review of its specifications, validation results, and emerging applications. Meteorol. Z. 2013, 22, 5–33. [Google Scholar] [CrossRef]
- Balenzano, A.; Satalino, G.; Lovergine, F.; Rinaldi, M.; Iacobellis, V.; Mastronardi, N.; Mattia, F. On the use of temporal series of L- and X-band SAR data for soil moisture retrieval. Capitanata plain case study. Eur. J. Remote Sens. 2013, 46, 721–737. [Google Scholar] [CrossRef]
- Dingman, S.L. Physical Hydrology, 3rd ed.; Waveland Press, Inc.: Long Grove, IL, USA, 2015. [Google Scholar]
- Nash, J.E.; Sutcliffe, J.V. River Flow Forecasting Through Conceptual Models Part I-a Discussion of Principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Chen, F.; Crow, W.T.; Starks, P.J.; Moriasi, D.N. Improving hydrologic predictions of a catchment model via assimilation of surface soil moisture. Adv. Water Resour. 2011, 34, 526–536. [Google Scholar] [CrossRef]
- Ritter, A.; Muñoz-Carpena, R. Performance evaluation of hydrological models: Statistical significance for reducing subjectivity in goodness-of-fit assessments. J. Hydrol. 2013, 480, 33–45. [Google Scholar] [CrossRef]
- Dawson, C.W.; Abrahart, R.J.; See, L.M. HydroTest: A web-based toolbox of evaluation metrics for the standardised assessment of hydrological forecasts. Environ. Model. Softw. 2007, 22, 1034–1052. [Google Scholar] [CrossRef] [Green Version]
- Paris Anguela, T.; Zribi, M.; Hasenauer, S.; Habets, F.; Loumagne, C. Analysis of surface and root-zone soil moisture dynamics with ERS scatterometer and the hydrometeorological model SAFRAN-ISBA-MODCOU at Grand Morin watershed (France). Hydrol. Earth Syst. Sci. 2008, 12, 1415–1424. [Google Scholar] [CrossRef] [Green Version]
- Das, N.N.; Entekhabi, D.; Kim, S.; Jagdhuber, T.; Dunbar, S.; Yueh, S.; Colliander, A. High-resolution enhanced product based on SMAP active-passive approach using sentinel IA and IB SAR data. In Proceedings of the 2017 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2493–2494. [Google Scholar] [CrossRef]
- Crow, W.T.; Ryu, D. A new data assimilation approach for improving runoff prediction using remotely-sensed soil moisture retrievals. Hydrol. Earth Syst. Sci. 2009, 13, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Crow, W.T.; Ryu, D. Dual Forcing and State Correction via Soil Moisture Assimilation for Improved Rainfall–Runoff Modeling. J. Hydrometeorol. 2014, 15, 1832–1848. [Google Scholar] [CrossRef]
- Alvarez-Garreton, C.; Ryu, D.; Western, A.W.; Crow, W.T.; Su, C.-H.; Robertson, D.R. Dual assimilation of satellite soil moisture to improve streamflow prediction in data-scarce catchments. Water Resour. Res. 2016, 52, 5357–5375. [Google Scholar] [CrossRef]
- Massari, C.; Camici, S.; Ciabatta, L.; Brocca, L. Exploiting satellite-based surface soil moisture for flood forecasting in the Mediterranean area: State update versus rainfall correction. Remote Sens. 2018, 10, 292. [Google Scholar] [CrossRef]
- Wadge, G.; Guarnieri, A.M.; Hobbs, S.E.; Schulz, D. Potential atmospheric and terrestrial applications of a geosyncronous radar. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; Volume 4, pp. 946–949. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GEO SAR PRODUCT | SpR | TeR | Number of Observations |
|---|---|---|---|
| GEO-1 | 800 m | 1 h | 1968 |
| GEO-2 | 400 m | 2 h (average value) | 984 |
| GEO-3 | 100 m | 8 h (average value) | 246 |
| Relative Orbit Number | Pass Direction | Acquisition Time |
|---|---|---|
| 124 | Descending | 05:03 |
| 44 | Ascending | 16:57 |
| 146 | Ascending | 16:49 |
| POLAR SAR PRODUCT | SpR | TeR | Number of Observations |
|---|---|---|---|
| POLAR-1 | 800 m | Same as S1 | 58 |
| POLAR-2 | 400 m | Same as S1 | 58 |
| POLAR-3 | 100 m | Same as S1 | 58 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cenci, L.; Pulvirenti, L.; Boni, G.; Pierdicca, N. Defining a Trade-off Between Spatial and Temporal Resolution of a Geosynchronous SAR Mission for Soil Moisture Monitoring. Remote Sens. 2018, 10, 1950. https://doi.org/10.3390/rs10121950
Cenci L, Pulvirenti L, Boni G, Pierdicca N. Defining a Trade-off Between Spatial and Temporal Resolution of a Geosynchronous SAR Mission for Soil Moisture Monitoring. Remote Sensing. 2018; 10(12):1950. https://doi.org/10.3390/rs10121950
Chicago/Turabian StyleCenci, Luca, Luca Pulvirenti, Giorgio Boni, and Nazzareno Pierdicca. 2018. "Defining a Trade-off Between Spatial and Temporal Resolution of a Geosynchronous SAR Mission for Soil Moisture Monitoring" Remote Sensing 10, no. 12: 1950. https://doi.org/10.3390/rs10121950
APA StyleCenci, L., Pulvirenti, L., Boni, G., & Pierdicca, N. (2018). Defining a Trade-off Between Spatial and Temporal Resolution of a Geosynchronous SAR Mission for Soil Moisture Monitoring. Remote Sensing, 10(12), 1950. https://doi.org/10.3390/rs10121950