A Spatiotemporal Contextual Model for Forest Fire Detection Using Himawari-8 Satellite Data


Abstract
:1. Introduction
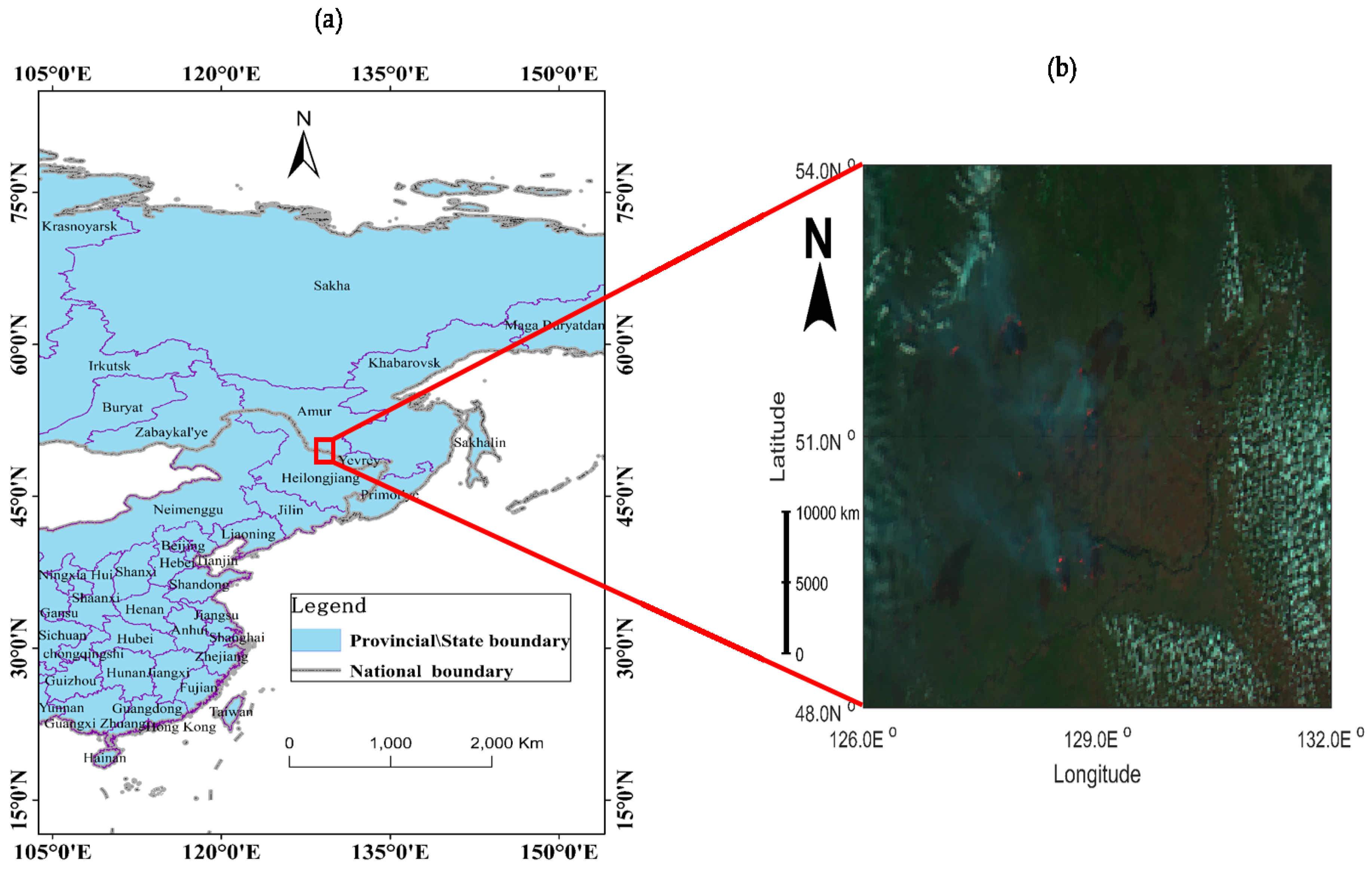
2.1. Case Study Fires
2.2. Himawari-8 Satellite Data
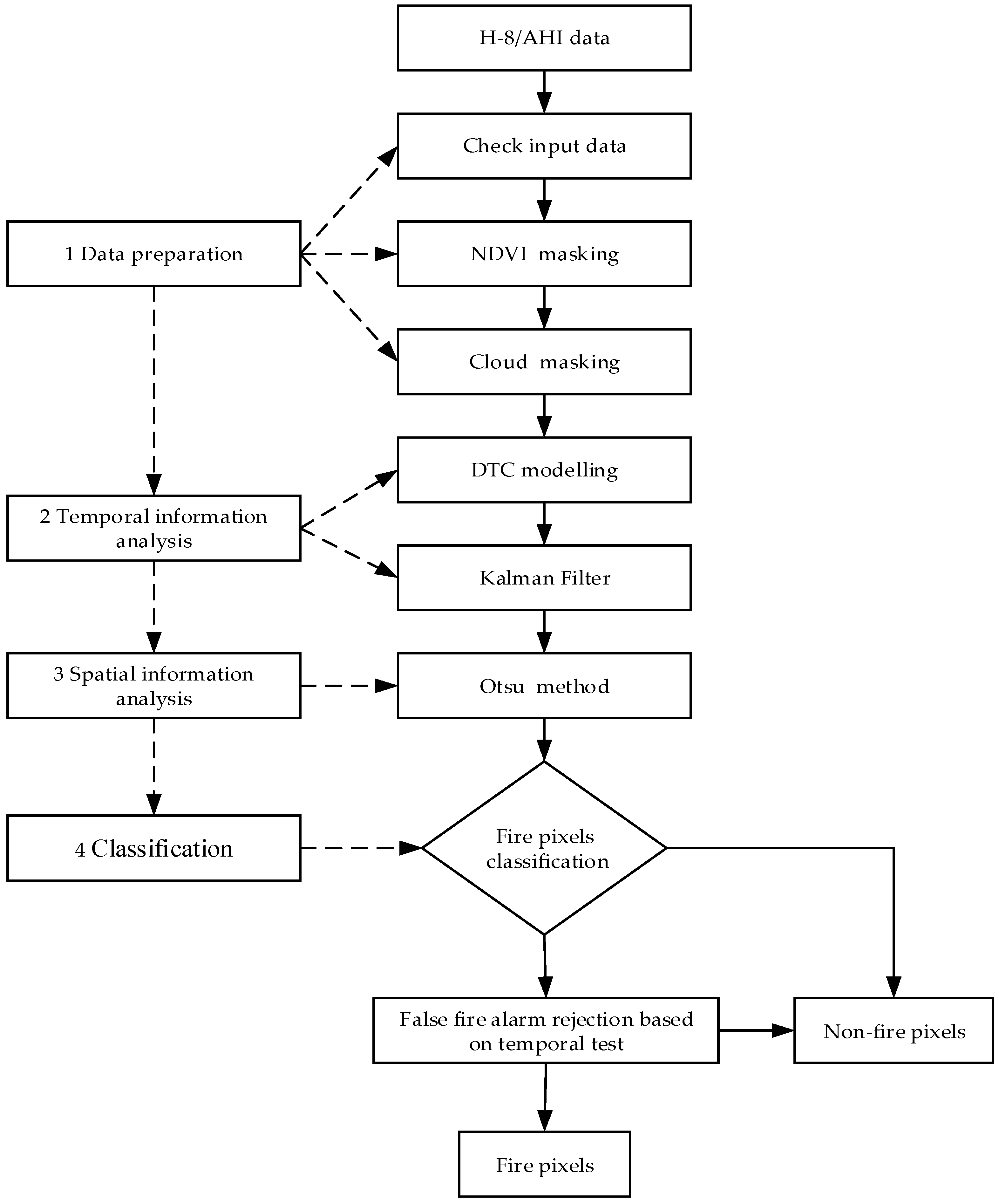
2.3. Overview of the Improved Algorithm
2.4. Data Preparation
2.4.1. Cloud Masking
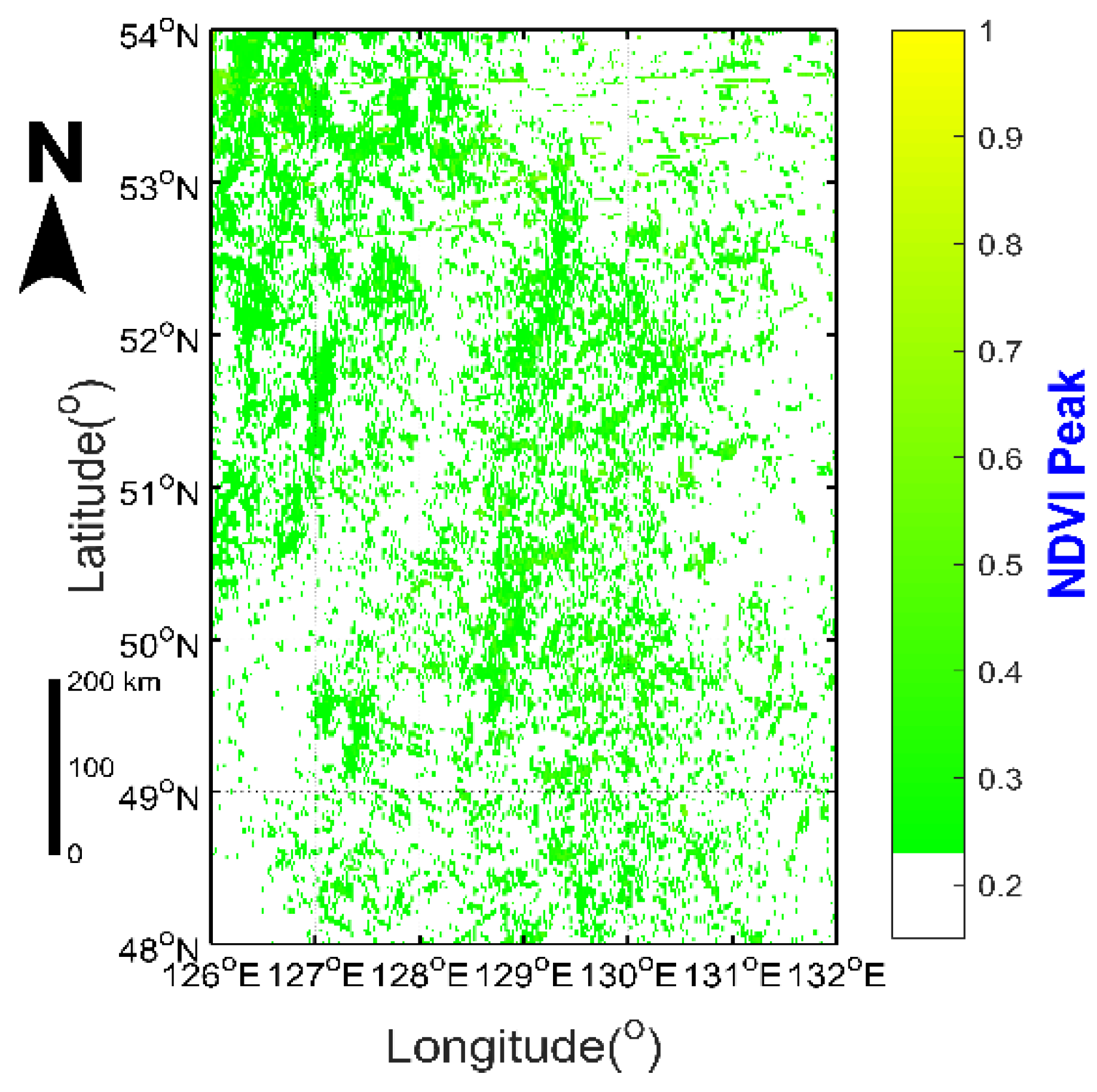
2.4.2. Forest Fuel Mask Model
2.5. Temporal Information Analysis
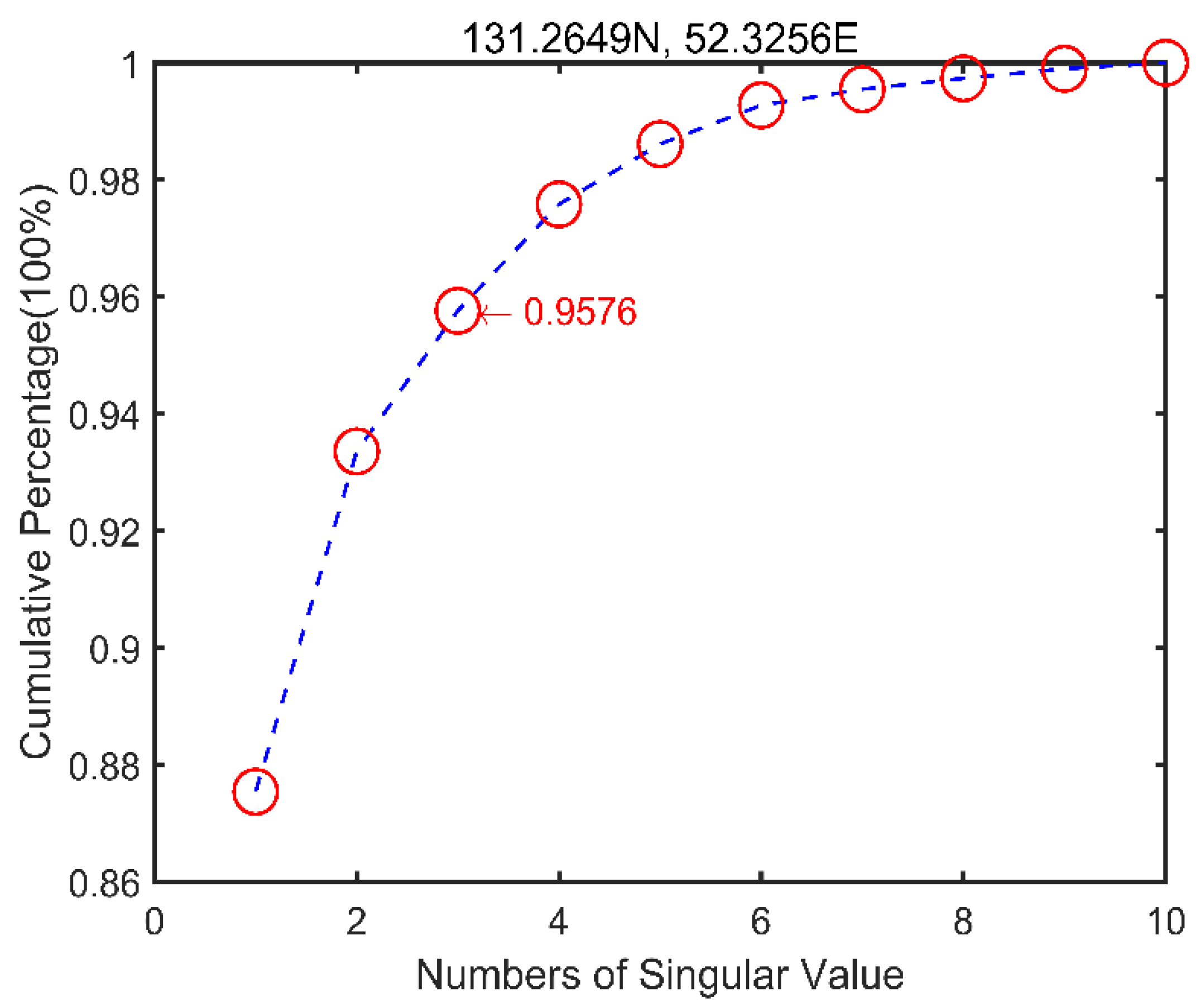
2.5.1. Modelling the Diurnal Temperature Cycle (DTC)
2.5.2. Kalman Filter
2.6. Spatial Inforamtion Analysis
Otsu Method
2.7. Fire Detection Algorithm
3. Results
3.1. Accuracy of Model DTC
3.2. Accuracy of Forest Fire Detection
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| STCM | spatiotemporal contextual model |
| EO | Earth Observation |
| AHI | Advanced Himawari Imager |
| NOAA | National Oceanic and Atmospheric Administration |
| DTC | diurnal temperature cycles |
| KF | Kalman filter |
| NDVI | normalized difference vegetation index |
| MVC | maximum value month composited of NDVI |
| Otsu | maximum variance between clusters |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| FRP | fire radiative power |
| MIR | mid-wave infrared |
| LWIR | long-wave infrared |
| BT | brightness temperature |
| PSF | point spread function |
| SVM | support vector machine |
| KNN | k-nearest-neighbor |
| CRF | conditional random field |
| SRC | sparse representation-based classification |
| ANN | artificial neural network |
| SEVIRI | Spinning Enhanced Visible and Infrared Imager |
| RST | robust satellite technique |
| RKHS | reproducing kernel Hilbert space |
| SVD | singular value decomposition |
| DDM | dynamic detection model |
| STM | spatio-temporal model |
| IRS | Infrared Camera Sensor |
| VIRR | Visible and Infra-Red Radiometer |
| RFA | robust fitting algorithm |
| IRFA | improved robust fitting algorithm |
| SOZ | solar zenith angle |
| UT | universal time |
| UTC | coordinated universal time |
| FTP | file transfer protocol |
| NetCDF | network common data format |
| LEO | low earth orbit |
| ABI | Advanced Baseline Imager |
| ROI | region of interest |
| RMS | root mean square |
| MODIS-R | MODIS remapped |
| pFTA | Prototype of Fire Thermal Anomalies |
| UAV | unmanned aerial vehicle |
| GF-4 | GaoFen-4 |
| CNN | convolutional neural network |
References
- Chowdhury, E.H.; Hassan, Q.K. Operational perspective of remote sensing-based forest fire danger forecasting systems. ISPRS J. Photogramm. Remote Sens. 2015, 104, 224–236. [Google Scholar] [CrossRef]
- Molina-Pico, A.; Cuesta-Frau, D.; Araujo, A.; Alejandre, J.; Rozas, A. Forest Monitoring and Wildland Early Fire Detection by a Hierarchical Wireless Sensor Network. J. Sens. 2016, 2016, 8325845. [Google Scholar] [CrossRef]
- Di Biase, V.; Laneve, G. Geostationary Sensor Based Forest Fire Detection and Monitoring: An Improved Version of the SFIDE Algorithm. Remote Sens. 2018, 10, 741. [Google Scholar] [CrossRef]
- Mathi, P.T.; Latha, L. Video Based Forest Fire Detection using Spatio-Temporal Flame Modeling and Dynamic Texture Analysis. Int. J. Appl. Inf. Commun. Eng. 2016, 2, 41–47. [Google Scholar]
- Keywood, M.; Kanakidou, M.; Stohl, A.; Dentener, F.; Grassi, G.; Meyer, C.; Torseth, K.; Edwards, D.; Thompson, A.M.; Lohmann, U. Fire in the air: Biomass burning impacts in a changing climate. Crit. Rev. Environ. Sci. Technol. 2013, 43, 40–83. [Google Scholar] [CrossRef]
- Randerson, J.T.; Liu, H.; Flanner, M.G.; Chambers, S.D.; Jin, Y.; Hess, P.G.; Pfister, G.; Mack, M.; Treseder, K.; Welp, L. The impact of boreal forest fire on climate warming. Science 2006, 314, 1130–1132. [Google Scholar] [CrossRef]
- Wang, W.; Mao, F.; Du, L.; Pan, Z.; Gong, W.; Fang, S. Deriving hourly PM2.5 concentrations from himawari-8 aods over beijing–tianjin–hebei in china. Remote Sens. 2017, 9, 858. [Google Scholar] [CrossRef]
- Ichoku, C.; Ellison, L.T.; Willmot, K.E.; Matsui, T.; Dezfuli, A.K.; Gatebe, C.K.; Wang, J.; Wilcox, E.M.; Lee, J.; Adegoke, J. Biomass burning, land-cover change, and the hydrological cycle in Northern sub-Saharan Africa. Environ. Res. Lett. 2016, 11, 095005. [Google Scholar] [CrossRef] [Green Version]
- Huh, Y.; Lee, J. Enhanced contextual forest fire detection with prediction interval analysis of surface temperature using vegetation amount. Int. J. Remote Sens. 2017, 38, 3375–3393. [Google Scholar] [CrossRef]
- Lin, Z.; Chen, F.; Niu, Z.; Li, B.; Yu, B.; Jia, H.; Zhang, M. An active fire detection algorithm based on multi-temporal FengYun-3C VIRR data. Remote Sens. Environ. 2018, 211, 376–387. [Google Scholar] [CrossRef]
- Freeborn, P.H.; Wooster, M.J.; Roberts, G.; Xu, W. Evaluating the SEVIRI fire thermal anomaly detection algorithm across the Central African Republic using the MODIS active fire product. Remote Sens. 2014, 6, 1890–1917. [Google Scholar] [CrossRef]
- Chuvieco, E.; Aguado, I.; Yebra, M.; Nieto, H.; Salas, J.; Martín, M.P.; Vilar, L.; Martínez, J.; Martín, S.; Ibarra, P. Development of a framework for fire risk assessment using remote sensing and geographic information system technologies. Ecol. Model. 2010, 221, 46–58. [Google Scholar] [CrossRef] [Green Version]
- Chuvieco, E.; Aguado, I.; Jurdao, S.; Pettinari, M.L.; Yebra, M.; Salas, J.; Hantson, S.; de la Riva, J.; Ibarra, P.; Rodrigues, M. Integrating geospatial information into fire risk assessment. Int. J. Wildland Fire 2014, 23, 606–619. [Google Scholar] [CrossRef] [Green Version]
- Saglam, B.; Bilgili, E.; Dincdurmaz, B.; Kadiogulari, A.; Kücük, Ö. Spatio-Temporal Analysis of Forest Fire Risk and Danger Using LANDSAT Imagery. Sensors 2008, 8, 3970–3987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, K.; Zhang, X.; Chen, Z.; Wu, W.; Li, T. Risk assessment for wildfire occurrence in high-voltage power line corridors by using remote-sensing techniques: A case study in Hubei Province, China. Int. J. Remote Sens. 2016, 37, 4818–4837. [Google Scholar] [CrossRef]
- Chuvieco, E.; Cocero, D.; Riano, D.; Martin, P.; Martınez-Vega, J.; de la Riva, J.; Perez, F. Combining NDVI and surface temperature for the estimation of live fuel moisture content in forest fire danger rating. Remote Sens. Environ. 2004, 92, 322–331. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhu, X.; Yebra, M.; Harris, S.; Tapper, N. Strata-based forest fuel classification for wild fire hazard assessment using terrestrial LiDAR. J. Appl. Remote Sens. 2016, 10, 046025. [Google Scholar] [CrossRef]
- Petrakis, R.E.; Villarreal, M.L.; Wu, Z.; Hetzler, R.; Middleton, B.R.; Norman, L.M. Evaluating and monitoring forest fuel treatments using remote sensing applications in Arizona, USA. For. Ecol. Manag. 2018, 413, 48–61. [Google Scholar] [CrossRef]
- Matson, M.; Stephens, G.; Robinson, J. Fire detection using data from the NOAA-N satellites. Int. J. Remote Sens. 1987, 8, 961–970. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Justice, C.O.; Flynn, L.P.; Kendall, J.D.; Prins, E.M.; Giglio, L.; Ward, D.E.; Menzel, W.P.; Setzer, A.W. Potential global fire monitoring from EOS-MODIS. J. Geophys. Res. Atmos. 1998, 103, 32215–32238. [Google Scholar] [CrossRef] [Green Version]
- Csiszar, I.; Schroeder, W.; Giglio, L.; Ellicott, E.; Vadrevu, K.P.; Justice, C.O.; Wind, B. Active fires from the Suomi NPP Visible Infrared Imaging Radiometer Suite: Product status and first evaluation results. J. Geophys. Res. Atmos. 2014, 119, 803–816. [Google Scholar] [CrossRef] [Green Version]
- Roberts, G.J.; Wooster, M.J. Fire detection and fire characterization over Africa using Meteosat SEVIRI. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1200–1218. [Google Scholar] [CrossRef]
- Wickramasinghe, C.H.; Jones, S.; Reinke, K.; Wallace, L. Development of a multi-spatial resolution approach to the surveillance of active fire lines using Himawari-8. Remote Sens. 2016, 8, 932. [Google Scholar] [CrossRef]
- Xu, W.; Wooster, M.; Roberts, G.; Freeborn, P. New GOES imager algorithms for cloud and active fire detection and fire radiative power assessment across North, South and Central America. Remote Sens. Environ. 2010, 114, 1876–1895. [Google Scholar] [CrossRef]
- Riano, D.; Meier, E.; Allgöwer, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.C.; Stripling, C.; Spencer, T. Mapping surface fuel models using lidar and multispectral data fusion for fire behavior. Remote Sens. Environ. 2008, 112, 274–285. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.C.; Zhao, K. Sensitivity analysis of fire behavior modeling with LIDAR-derived surface fuel maps. For. Ecol. Manag. 2008, 256, 289–294. [Google Scholar] [CrossRef]
- Ward, D.E.; Hardy, C.C. Smoke emissions from wildland fires. Environ. Int. 1991, 17, 117–134. [Google Scholar] [CrossRef] [Green Version]
- Hodzic, A.; Madronich, S.; Bohn, B.; Massie, S.; Menut, L.; Wiedinmyer, C. Wildfire particulate matter in Europe during summer 2003: Meso-scale modeling of smoke emissions, transport and radiative effects. Atmos. Chem. Phys. 2007, 7, 4043–4064. [Google Scholar] [CrossRef]
- Van Der Werf, G.R.; Randerson, J.T.; Giglio, L.; Van Leeuwen, T.T.; Chen, Y.; Rogers, B.M.; Mu, M.; Van Marle, M.J.; Morton, D.C.; Collatz, G.J. Global fire emissions estimates during 1997–2016. Earth Syst. Sci. Data 2017, 9, 697–720. [Google Scholar] [CrossRef] [Green Version]
- Crippa, P.; Castruccio, S.; Archer-Nicholls, S.; Lebron, G.; Kuwata, M.; Thota, A.; Sumin, S.; Butt, E.; Wiedinmyer, C.; Spracklen, D. Population exposure to hazardous air quality due to the 2015 fires in Equatorial Asia. Sci. Rep. 2016, 6, 37074. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carvalho, A.; Monteiro, A.; Flannigan, M.; Solman, S.; Miranda, A.I.; Borrego, C. Forest fires in a changing climate and their impacts on air quality. Atmos. Environ. 2011, 45, 5545–5553. [Google Scholar] [CrossRef]
- Marlier, M.E.; DeFries, R.S.; Kim, P.S.; Koplitz, S.N.; Jacob, D.J.; Mickley, L.J.; Myers, S.S. Fire emissions and regional air quality impacts from fires in oil palm, timber, and logging concessions in Indonesia. Environ. Res. Lett. 2015, 10, 085005. [Google Scholar] [CrossRef] [Green Version]
- Qu, J.J.; Hao, X. Introduction to Remote Sensing and Modeling Applications to Wildland Fires. In Remote Sensing and Modeling Applications to Wildland Fires; Springer: Heidelberg, Germany, 2013; pp. 1–9. [Google Scholar]
- Li, Z.; Kaufman, Y.J.; Ichoku, C.; Fraser, R.; Trishchenko, A.; Giglio, L.; Jin, J.; Yu, X. A review of AVHRR-based active fire detection algorithms: Principles, limitations, and recommendations. In Global and Regional Vegetation Fire Monitoring from Space, Planning and Coordinated International Effort; Kugler Publications: Amsterdam, The Netherlands, 2001; pp. 199–225. [Google Scholar]
- Robinson, J.M. Fire from space: Global fire evaluation using infrared remote sensing. Int. J. Remote Sens. 1991, 12, 3–24. [Google Scholar] [CrossRef]
- Roberts, G.; Wooster, M.J. Development of a multi-temporal Kalman filter approach to geostationary active fire detection & fire radiative power (FRP) estimation. Remote Sens. Environ. 2014, 152, 392–412. [Google Scholar]
- Freeborn, P.H.; Wooster, M.J.; Roberts, G.; Malamud, B.D.; Xu, W. Development of a virtual active fire product for Africa through a synthesis of geostationary and polar orbiting satellite data. Remote Sens. Environ. 2009, 113, 1700–1711. [Google Scholar] [CrossRef]
- Wickramasinghe, C.; Wallace, L.; Reinke, K.; Jones, S. Implementation of a new algorithm resulting in improvements in accuracy and resolution of SEVIRI hotspot products. Remote Sens. Lett. 2018, 9, 877–885. [Google Scholar] [CrossRef]
- Koltunov, A.; Ustin, S. Early fire detection using non-linear multitemporal prediction of thermal imagery. Remote Sens. Environ. 2007, 110, 18–28. [Google Scholar] [CrossRef]
- Lin, L.; Meng, Y.; Yue, A.; Yuan, Y.; Liu, X.; Chen, J.; Zhang, M.; Chen, J. A spatio-temporal model for forest fire detection using HJ-IRS satellite data. Remote Sens. 2016, 8, 403. [Google Scholar] [CrossRef]
- Filizzola, C.; Corrado, R.; Marchese, F.; Mazzeo, G.; Paciello, R.; Pergola, N.; Tramutoli, V. RST-FIRES, an exportable algorithm for early-fire detection and monitoring: Description, implementation, and field validation in the case of the MSG-SEVIRI sensor. Remote Sens. Environ. 2017, 192, e2–e25. [Google Scholar] [CrossRef]
- Wooster, M.J.; Xu, W.; Nightingale, T. Sentinel-3 SLSTR active fire detection and FRP product: Pre-launch algorithm development and performance evaluation using MODIS and ASTER datasets. Remote Sens. Environ. 2012, 120, 236–254. [Google Scholar] [CrossRef]
- He, L.; Li, Z. Enhancement of a fire detection algorithm by eliminating solar reflection in the mid-IR band: Application to AVHRR data. Int. J. Remote Sens. 2012, 33, 7047–7059. [Google Scholar] [CrossRef]
- Arino, O.; Casadio, S.; Serpe, D. Global night-time fire season timing and fire count trends using the ATSR instrument series. Remote Sens. Environ. 2012, 116, 226–238. [Google Scholar] [CrossRef]
- Hassini, A.; Benabdelouahed, F.; Benabadji, N.; Belbachir, A.H. Active fire monitoring with level 1.5 MSG satellite images. Am. J. Appl. Sci. 2009, 6, 157. [Google Scholar] [CrossRef]
- Li, Z.; Nadon, S.; Cihlar, J. Satellite-based detection of Canadian boreal forest fires: Development and application of the algorithm. Int. J. Remote Sens. 2000, 21, 3057–3069. [Google Scholar] [CrossRef] [Green Version]
- Plank, S.; Fuchs, E.-M.; Frey, C. A Fully Automatic Instantaneous Fire Hotspot Detection Processor Based on AVHRR Imagery—A TIMELINE Thematic Processor. Remote Sens. 2017, 9, 30. [Google Scholar] [CrossRef]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An enhanced contextual fire detection algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Flasse, S.; Ceccato, P. A contextual algorithm for AVHRR fire detection. Int. J. Remote Sens. 1996, 17, 419–424. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef]
- Hally, B.; Wallace, L.; Reinke, K.; Jones, S.; Skidmore, A. Advances in active fire detection using a multi-temporal method for next-generation geostationary satellite data. Int. J. Digit. Earth 2018, 1–16. [Google Scholar] [CrossRef]
- Hally, B.; Wallace, L.; Reinke, K.; Jones, S.; Engel, C.; Skidmore, A. Estimating Fire Background Temperature at a Geostationary Scale—An Evaluation of Contextual Methods for AHI-8. Remote Sens. 2018, 10, 1368. [Google Scholar] [CrossRef]
- Schroeder, W.; Prins, E.; Giglio, L.; Csiszar, I.; Schmidt, C.; Morisette, J.; Morton, D. Validation of GOES and MODIS active fire detection products using ASTER and ETM+ data. Remote Sens. Environ. 2008, 112, 2711–2726. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W. A global feasibility assessment of the bi-spectral fire temperature and area retrieval using MODIS data. Remote Sens. Environ. 2014, 152, 166–173. [Google Scholar] [CrossRef]
- Giglio, L.; Kendall, J.D. Application of the Dozier retrieval to wildfire characterization: A sensitivity analysis. Remote Sens. Environ. 2001, 77, 34–49. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J. A survey on object detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2016, 117, 11–28. [Google Scholar] [CrossRef] [Green Version]
- Camps-Valls, G. Machine learning in remote sensing data processing. In Proceedings of the 2009 IEEE International Workshop on Machine Learning for Signal Processing, Grenoble, France, 1–4 September 2009; pp. 1–6. [Google Scholar]
- Li, X.; Song, W.; Lian, L.; Wei, X. Forest fire smoke detection using back-propagation neural network based on MODIS data. Remote Sens. 2015, 7, 4473–4498. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, Y.; Song, W.; Xiao, X. An enhanced algorithm for forest fire detection based on modis data. In Proceedings of the 2010 International Conference on Optoelectronics and Image Processing, Haikou, China, 11–12 November 2010; pp. 200–203. [Google Scholar]
- Van den Bergh, F.; Udahemuka, G.; van Wyk, B.J. Potential fire detection based on Kalman-driven change detection. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; pp. IV-77–IV-80. [Google Scholar]
- Laneve, G.; Castronuovo, M.M.; Cadau, E.G. Continuous monitoring of forest fires in the Mediterranean area using MSG. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2761–2768. [Google Scholar] [CrossRef]
- Göttsche, F.-M.; Olesen, F.S. Modelling of diurnal cycles of brightness temperature extracted from METEOSAT data. Remote Sens. Environ. 2001, 76, 337–348. [Google Scholar] [CrossRef]
- Van den Bergh, F.; Van Wyk, M.; Van Wyk, B. Comparison of Data-Driven and Model-Driven Approaches to Brightness Temperature Diurnal Cycle Interpolation. 2006. Available online: http://researchspace.csir.co.za/dspace/handle/10204/991 (accessed on 10 September 2018).
- Udahemuka, G.; Van Den Bergh, F.; Van Wyk, B.; Van Wyk, M. Robust fitting of diurnal brightness temperature cycle. In Proceedings of the 18th Annual Symposium of the Pattern Recognition Association of South Africa (PRASA), Pietermaritzburg, Kwazulu-Natal, South Africa, 28–30 November 2007; p. 6. [Google Scholar]
- Hally, B.; Wallace, L.; Reinke, K.; Jones, S. ASSESSMENT OF THE UTILITY OF THE ADVANCED HIMAWARI IMAGER TO DETECT ACTIVE FIRE OVER AUSTRALIA. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 65–71. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Van den Bergh, F.; Frost, P. A multi temporal approach to fire detection using MSG data. In Proceedings of the 2nd IEEE International Workshop on the Analysis of Multitemporal Remote Sensing Images, Biloxi, MS, USA, 16–18 May 2005; p. 156160. [Google Scholar]
- Available online: http://www.chinanews.com/sh/2017/05-07/8217749.shtml (accessed on 12 September 2018).
- Available online: http://www.chinadaily.com.cn/interface/yidian/1120781/2016-05-25/cd_25458947.html (accessed on 1 September 2018).
- Available online: http://news.sohu.com/20151126/n428250572.shtml (accessed on 19 November 2018).
- Available online: http://news.sciencenet.cn/htmlnews/2016/2/338777.shtm (accessed on 19 November 2018).
- Available online: https://unearthed.greenpeace.org/2016/05/26/russian-government-covers-up-forest-fires-twice-the-size-of-alberta-blaze/ (accessed on 11 September 2018).
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T. An introduction to Himawari-8/9—Japan’s new-generation geostationary meteorological satellites. J. Meteorol. Soc. Jpn. Ser. II 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Xu, W.; Wooster, M.J.; Kaneko, T.; He, J.; Zhang, T.; Fisher, D. Major advances in geostationary fire radiative power (FRP) retrieval over Asia and Australia stemming from use of Himarawi-8 AHI. Remote Sens. Environ. 2017, 193, 138–149. [Google Scholar] [CrossRef]
- Boles, S.H.; Verbyla, D.L. Comparison of three AVHRR-based fire detection algorithms for interior Alaska. Remote Sens. Environ. 2000, 72, 1–16. [Google Scholar] [CrossRef]
- Xu, G.; Zhong, X. Real-time wildfire detection and tracking in Australia using geostationary satellite: Himawari-8. Remote Sens. Lett. 2017, 8, 1052–1061. [Google Scholar] [CrossRef]
- Leskovec, J.; Rajaraman, A.; Ullman, J.D. Mining of Massive Datasets; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Na, L.; Zhang, J.; Bao, Y.; Bao, Y.; Na, R.; Tong, S.; Si, A. Himawari-8 Satellite Based Dynamic Monitoring of Grassland Fire in China-Mongolia Border Regions. Sensors 2018, 18, 276. [Google Scholar] [CrossRef] [PubMed]
- Hally, B.; Wallace, L.; Reinke, K.; Jones, S. A broad-area method for the Diurnal characterisation of upwelling medium wave infrared radiation. Remote Sens. 2017, 9, 167. [Google Scholar] [CrossRef]
- Duan, R.; Li, L.J.; Jiang, L.; Li, Q.; Zhang, D.W.; Han, L.H. Monitoring of straw burning in Northeast China based on Himawari-8 satellite and studty its influence on air quality. Environ. Pollut. Control 2018, 40, 274–277. (In Chinese) [Google Scholar]
- Justice, C.; Giglio, L.; Korontzi, S.; Owens, J.; Morisette, J.; Roy, D.; Descloitres, J.; Alleaume, S.; Petitcolin, F.; Kaufman, Y. The MODIS fire products. Remote Sens. Environ. 2002, 83, 244–262. [Google Scholar] [CrossRef]
- Liu, X.; He, B.; Quan, X.; Yebra, M.; Qiu, S.; Yin, C.; Liao, Z.; Zhang, H. Near Real-Time Extracting Wildfire Spread Rate from Himawari-8 Satellite Data. Remote Sens. 2018, 10, 1654. [Google Scholar] [CrossRef]
- Lock, N.A.; Houston, A.L. Spatiotemporal distribution of thunderstorm initiation in the US Great Plains from 2005 to 2007. Int. J. Climatol. 2015, 35, 4047–4056. [Google Scholar] [CrossRef]
- Wondie, M.; Schneider, W.; Melesse, A.M.; Teketay, D. Spatial and temporal land cover changes in the Simen Mountains National Park, a world heritage site in Northwestern Ethiopia. Remote Sens. 2011, 3, 752–766. [Google Scholar] [CrossRef]
- Yan, Y.-E.; Ouyang, Z.-T.; Guo, H.-Q.; Jin, S.-S.; Zhao, B. Detecting the spatiotemporal changes of tidal flood in the estuarine wetland by using MODIS time series data. J. Hydrol. 2010, 384, 156–163. [Google Scholar] [CrossRef]
- El-Isa, Z.H.; Eaton, D.W. Spatiotemporal variations in the b-value of earthquake magnitude–frequency distributions: Classification and causes. Tectonophysics 2014, 615, 1–11. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fire Case | Burned Area (km2) | Duration | Geographic Coordinate Range |
|---|---|---|---|
| Bilahe | 115 | 2 to 6 May 2016 | 49°N–50°N, 123°E–124°E |
| Cross-border | 5625 | 2 to 14 May 2016 | 48°N–54°N, 126°E–132°E |
| Adelaide | 850 | 20 to 28 November 2016 | 34°S–36°S, 138°E–140°E |
| Tasmania | 1050 | 15 to 28 January 2016 | 41°S–44°S, 145°E–148°E |
| Band # | Wavelength (µm) | Spatial Resolution (km) | Unit | Detection Target |
|---|---|---|---|---|
| 2 | 0.51 | 1 | Unitless | cloud |
| 3 | 0.64 | 0.5 | Unitless | cloud/night/vegetation |
| 4 | 0.86 | 1 | Unitless | cloud/night/vegetation |
| 6 | 2.3 | 2 | Unitless | cloud |
| 7 | 3.9 | 2 | Kevin | fire/cloud |
| 14 | 11.2 | 2 | Kevin | fire |
| Fitting Technique | RMS Error (K) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Number of Outliers | ≤30 | 30–60 | 60–90 | 90–120 | >120 | |||||
| Band | MIR | LWIR | MIR | LWIR | MIR | LWIR | MIR | LWIR | MIR | LWIR |
| RFA | 0.51 | 0.94 | 3.48 | 1.98 | 1.73 | 3.46 | 9.69 | 18.72 | 24.87 | 36.81 |
| IRFA | 0.51 | 0.33 | 0.93 | 0.87 | 1.32 | 1.03 | 3.87 | 7.98 | 14.28 | 17.96 |
| Contextual method | 0.51 | 0.48 | 0.53 | 0.45 | 0.67 | 0.56 | 0.64 | 0.64 | 0.72 | 0.83 |
| Number of samples | 38 | 2652 | 46,682 | 43,368 | 11,2596 | |||||
| Fitting Technique | RMS Error (K) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Incidences of CSP < 1 | ≤30 | 30–60 | 60–90 | 90–120 | >120 | |||||
| Band | MIR | LWIR | MIR | LWIR | MIR | LWIR | MIR | LWIR | MIR | LWIR |
| RFA | 10.46 | 16.29 | 20.38 | 20.26 | 16.74 | 21.42 | 14.52 | 18.47 | 23.36 | 33.29 |
| IFRA | 8.31 | 11.74 | 18.01 | 18.54 | 13.25 | 17.28 | 14.52 | 16.20 | 14.27 | 22.36 |
| Contextual method | 22.29 | 26.88 | 20.36 | 24.88 | 36.47 | 36.90 | 38.24 | 36.27 | 29.83 | 36.87 |
| Fire Case | Commission Error (%) | Omission Error (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| CA | TA | STCM | STCM2 | CA | TA | STCM | STCM2 | |
| Bilahe | 9.37 | 10.26 | 7.16 | 5.08 | 70.42 | 66.28 | 53.29 | 50.76 |
| Cross-border | 8.27 | 8.73 | 7.16 | 5.27 | 60.18 | 52.64 | 49.27 | 48.13 |
| Adelaide | 10.27 | 10.34 | 7.62 | 5.36 | 66.73 | 56.26 | 52.96 | 50.19 |
| Tasmania | 8.46 | 8.48 | 6.28 | 5.72 | 62.35 | 50.74 | 48.27 | 44.36 |
| Overall (A) | 9.09 | 9.45 | 7.06 | 5.36 | 64.92 | 56.48 | 50.95 | 48.36 |
| Overall (D) | 7.48 | 8.36 | 6.85 | 5.03 | 52.76 | 48.65 | 44.72 | 41.03 |
| Overall (N) | 10.7 | 10.54 | 7.27 | 5.69 | 77.08 | 64.31 | 57.18 | 55.69 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Song, W.; Ba, R.; Li, X.; Xia, L. A Spatiotemporal Contextual Model for Forest Fire Detection Using Himawari-8 Satellite Data. Remote Sens. 2018, 10, 1992. https://doi.org/10.3390/rs10121992
Xie Z, Song W, Ba R, Li X, Xia L. A Spatiotemporal Contextual Model for Forest Fire Detection Using Himawari-8 Satellite Data. Remote Sensing. 2018; 10(12):1992. https://doi.org/10.3390/rs10121992
Chicago/Turabian StyleXie, Zixi, Weiguo Song, Rui Ba, Xiaolian Li, and Long Xia. 2018. "A Spatiotemporal Contextual Model for Forest Fire Detection Using Himawari-8 Satellite Data" Remote Sensing 10, no. 12: 1992. https://doi.org/10.3390/rs10121992
APA StyleXie, Z., Song, W., Ba, R., Li, X., & Xia, L. (2018). A Spatiotemporal Contextual Model for Forest Fire Detection Using Himawari-8 Satellite Data. Remote Sensing, 10(12), 1992. https://doi.org/10.3390/rs10121992