1. Introduction
The understanding of the dynamics in the troposphere and stratosphere is essentially based upon wind measurements. However, the amount and variety of wind data currently available from radiosondes, aircraft or air motion vectors (AMV), to name but a few, is subject to different constraints such as restriction to certain areas or large height assignment errors, hampering the improvement of Numerical Weather Prediction (NWP) and the advancement of climate studies. This is why, for more than a decade now, the World Meteorological Organisation (WMO) has been considering wind profiles at all levels outside the main populated areas as an objective of highest priority for global NWP [
1].
The only candidate to close this major gap in the global observing system and to provide a timely and global coverage of vertical wind profile observations is considered to be a spaceborne Doppler wind LiDAR (Stoffelen et al. [
2]; Baker et al. [
3]). Impact studies demonstrated that wind measurements can considerably improve medium-range weather forecast (Weissmann and Cardinali [
4]; Marseille et al. [
5]; Horányi et al. [
6]), locally reaching benefits of up to 0.8 days in simulations performed by Stoffelen et al. [
7]. Further studies showed that measurements from wind LiDARs, owing to their small representativeness and instrumental errors, have high potential to reduce the analysis error of NWP models in data-sparse regions (Marseille and Stoffelen [
8]; Tan and Andersson [
9]; Tan et al. [
10]).
In 1999, Aeolus was selected as the 2nd Earth Explorer Core Mission within ESA’s Living Planet Program to demonstrate its new technology for future operational LiDAR missions (ESA [
11]). The following almost two decades brought many advances on the diversifying field of wind LiDAR measurement systems (Reitebuch [
12]). Their applications range from the general measurement of wind and temperature turbulence (Banakh et al. [
13]) as well as wind shear dynamics with high temporal and spatial resolution (Shangguan et al. [
14]) to the detailed description of aircraft wake vortices (Koepp et al. [
15]) and even the detection of gravity waves in the troposphere using a coherent wind LiDAR (Witschas et al. [
16]). Accurate ground-based wind measurements have been demonstrated up to mesospheric heights of 60 km (Dou et al. [
17]) and higher (Hildebrand et al. [
18]). The mobility of the LiDARs can be increased by installing them on trucks (Xia et al. [
19]), ships (Zhai et al. [
20]) or aircraft (Hardesty et al. [
21]; Bruneau et al. [
22]; Reitebuch [
12]). Whether solid-state (Schröder et al. [
23]) or dye lasers (Li et al. [
24]), whether heterodyne (Kavaya et al. [
25]) or direct-detection systems (Gentry et al. [
26]; Herbst and Vrancken [
27]), the LiDAR community has access to a variety of different technologies supporting their individual goals. For instance, systems directly detecting wind speed induced Doppler shifts can be based upon Fabry-Pérot interferometers or iodine vapor absorption cells (Baumgarten [
28]; She et al. [
29]) but also Fizeau (Reitebuch et al. [
30]) or Mach-Zehnder interferometers (Bruneau et al. [
22]). Recent airborne measurements of an optical autocovariance wind LiDAR show a very promising performance, rendering this system a potentially valuable contributor to the calibration/validation of ESA’s Aeolus mission (Tucker et al. [
31]; Baidar et al. [
32]).
After its successful launch in August 2018, Aeolus became the first European LiDAR and the first wind LiDAR worldwide in space. Revolving around the Earth in a sun-synchronous dawn–dusk orbit at an altitude of 320 km and with a 35
off-nadir and across track viewing geometry, Aeolus will measure wind in the troposphere and lower stratosphere during its three years life-time (ESA [
11]). Additionally, spin-off products are expected from Aeolus’ measurements, such as backscatter and extinction information for improved monitoring of aerosol layers and cloud top heights (Ansmann et al. [
33]; Geiss et al. [
34]; Flamant et al. [
35]). The single range-gates of the measurement grid can be commanded from 250 m to 2000 m vertical thickness allowing for an altitude coverage from ≈30 km down to Earth’s surface and an adaptable resolution in scientifically interesting atmospheric regions.
The satellite carries a single payload, the Atmospheric Laser Doppler Instrument (ALADIN), which will send laser pulses in the ultra-violet (UV) spectral region at 355 nm towards the atmosphere (Reitebuch [
36]). By analyzing the Doppler shift of the backscattered photons, ALADIN can measure the wind speed along its LOS. Therefore, ALADIN features two interferometers that are sensitive to molecular and aerosol or cloud backscatter. This unique combination assures optimal coverage within the whole altitude range which constitutes a main difference compared to coherent wind LiDARs. To reduce the inherent risk in such new technologies, the A2D has been developed, now being the first direct-detection Doppler wind LiDAR to be operated from an aircraft in a viewing geometry comparable to Aeolus (Durand et al. [
37]; Reitebuch et al. [
30]). Due to constraints regarding the integration of the A2D into the DLR Falcon in combination with the size of the downward oriented window, the off-nadir viewing angle is limited to suboptimal 20
. As a prototype instrument, it supports the pre-launch validation, the optimization of wind retrieval algorithms as well as the verification of the calibration and wind measurement strategies of the satellite. A2D and ALADIN share the same novel combination of techniques. Never before had a combination of a Fizeau and a sequential layout of a double-edge Fabry-Pérot interferometer (FPI) been implemented in a direct-detection wind LiDAR. After being transmitted through these spectrometers, the light is detected by accumulation charge coupled devices (ACCDs) that have been uniquely manufactured for the Aeolus mission. Consequently, the sensitive interaction of this optical arrangement underwent detailed investigations with atmospheric signals (Reitebuch et al. [
30]; Reitebuch et al. [
38]; Paffrath et al. [
39]). By performing at the forefront in terms of high frequency and timing stability even under flight conditions, the A2D laser constitutes the basis of accurate wind measurements (Lemmerz et al. [
40]).
During several ground and airborne campaigns, the A2D had been employed on-board the DLR Falcon 20 aircraft along with a 2-µm wind LiDAR for comparative wind measurements. Other than the A2D, the 2-µm LiDAR uses a heterodyne detection method and can derive three-dimensional wind vectors due to its double wedge scanner. Its low systematic and random errors of better than 0.1 m/s and 1 m/s, respectively, regarding the horizontal wind speed, support its use as a reference system for the A2D and the validation of Aeolus (Weissmann et al. [
41]; Witschas et al. [
16]; Chouza et al. [
42]; Chouza et al. [
43]). Using the Keflavik airport on Iceland as the base, more than 20 flights in total have been performed during two airborne campaigns over the North Atlantic region in September 2009 and May 2015. During the latter, two LiDARs, namely the direct-detection TWiliTE (Gentry et al. [
26]) and the coherent DAWN instrument (Kavaya et al. [
25]), were deployed on the NASA DC-8 aircraft and likewise performed research flights in this North Atlantic region which is important regarding the evolution of weather systems that move towards Europe. First results describing e.g., the Barrier Flow in the Denmark Strait were published by DuVivier et al. [
44]. A recent paper by Lux et al. [
45] presents A2D wind observations of strong wind shear related to the jet stream over the North Atlantic during the North Atlantic Waveguide and Downstream Impact Experiment (NAWDEX) campaign in 2016.
Here, we present the first airborne calibrations and wind profiles obtained from an airborne direct-detection Doppler LiDAR as well as statistical comparisons of LOS winds measured by the A2D against those obtained from the 2-µm DWL. We demonstrate the complementarity of A2D winds derived from aerosol and molecular backscatter which is a clear advantage inherent to the direct-detection approach. However, an increased effort in calibrating the behavior of the LiDAR instrument is required in contrast to heterodyne systems. Therefore, it is important to quantify the quality of instrument response calibrations (IRCs) which might propagate systematic errors to the wind retrieval being detrimental for NWP. At first,
Section 2 introduces the instrumental setup followed by an overview of available data sets from the research flights in
Section 3. In
Section 4, we discuss the sensitivity and importance of the IRC. A new method is presented that allows to compare several IRCs as well as to assess their stability in
Section 5. After an explanation of the wind retrieval in
Section 6, statistical comparisons in
Section 7 not only describe the performance of the A2D system but also give an impression of what can be expected from spaceborne wind measurements by Aeolus. Finally, we conclude with a summary in
Section 8.
2. Method and Instrumental Setup
The principle of wind measurements by LiDAR relies on the detection of a Doppler shift (Reitebuch [
12]; Werner [
46]), i.e., on the difference between the frequency of an emitted laser pulse and the frequency of the spectrum backscattered from the probed atmospheric volume. Coarsely, the detection methods can be classified into a coherent approach and a direct-detection approach, the former measuring frequency shifts via a beat signal by comparing the incoming light to a local oscillator, the latter monitoring intensity changes of the backscattered light. Looking back in history, Chanin et al. [
47] demonstrated the first wind measurements in the middle atmosphere based on Rayleigh scattering using a pulsed laser at 532 nm and a double-edge Fabry-Pérot interferometer for direct detection. While still aiming at wind retrieval from aerosol backscatter, Korb et al. [
48] described the theory of the double-edge technique and its improvement in terms of signal-to-noise (SNR), accuracy and the capability of determining the molecular and aerosol signal independently. Subsequently, Flesia and Korb [
49] focused on the molecular part and then presented the first molecular-based wind measurements at 355 nm in the troposphere together with Gentry et al. (Flesia et al. [
50]; Gentry et al. [
51]). Based on A2D measurements, the first direct verification of Rayleigh Brillouin scattering in the atmosphere was performed by Witschas et al. [
52], thereby confirming the accurateness of the existing line shape models.
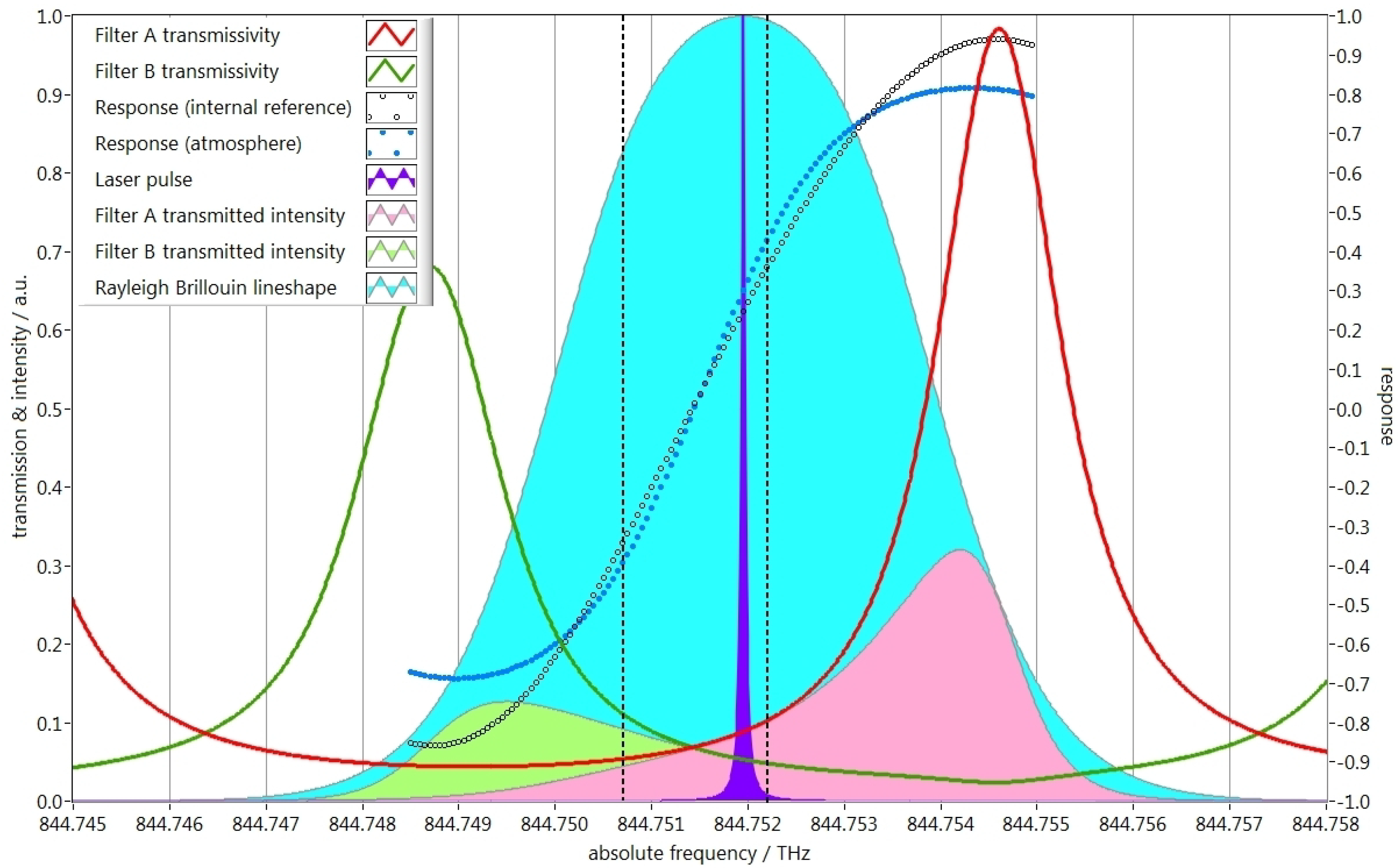
Figure 1 presents the direct-detection measurement principle applied to the molecular signal by the satellite instrument ALADIN and the A2D. The emitted laser spectrum is depicted as a narrow-band, violet peak with a full width at half maximum (FWHM) of 50 MHz. In contrast, the molecular Rayleigh backscatter spectrum is largely broadened up to about 4 GHz FWHM by thermal motion of the molecules. To the right and left of the Rayleigh spectrum the transmissivities of the two FPIs are indicated by a red and green line along with their corresponding transmitted intensities
I(A) and
I(B) symbolized by the pink and lime green filled areas. As described in Garnier and Chanin [
53] a so-called Rayleigh response
R can be calculated as the contrast ratio from the two intensities transmitted through filter A and B depending on the frequency
f.
The response describes the relation between the received backscatter signal and the frequency. Respective calibration curves are obtained by tuning the laser over a wide frequency range of at least 1 GHz and determining the response as depicted for the Internal Reference (black circles) and atmospheric signal (dotted dark blue line) in
Figure 1. Among others, the shape of the response curves depends on the spectral width of the spectrum of the backscatter signal and the frequency spacing between the two filters.
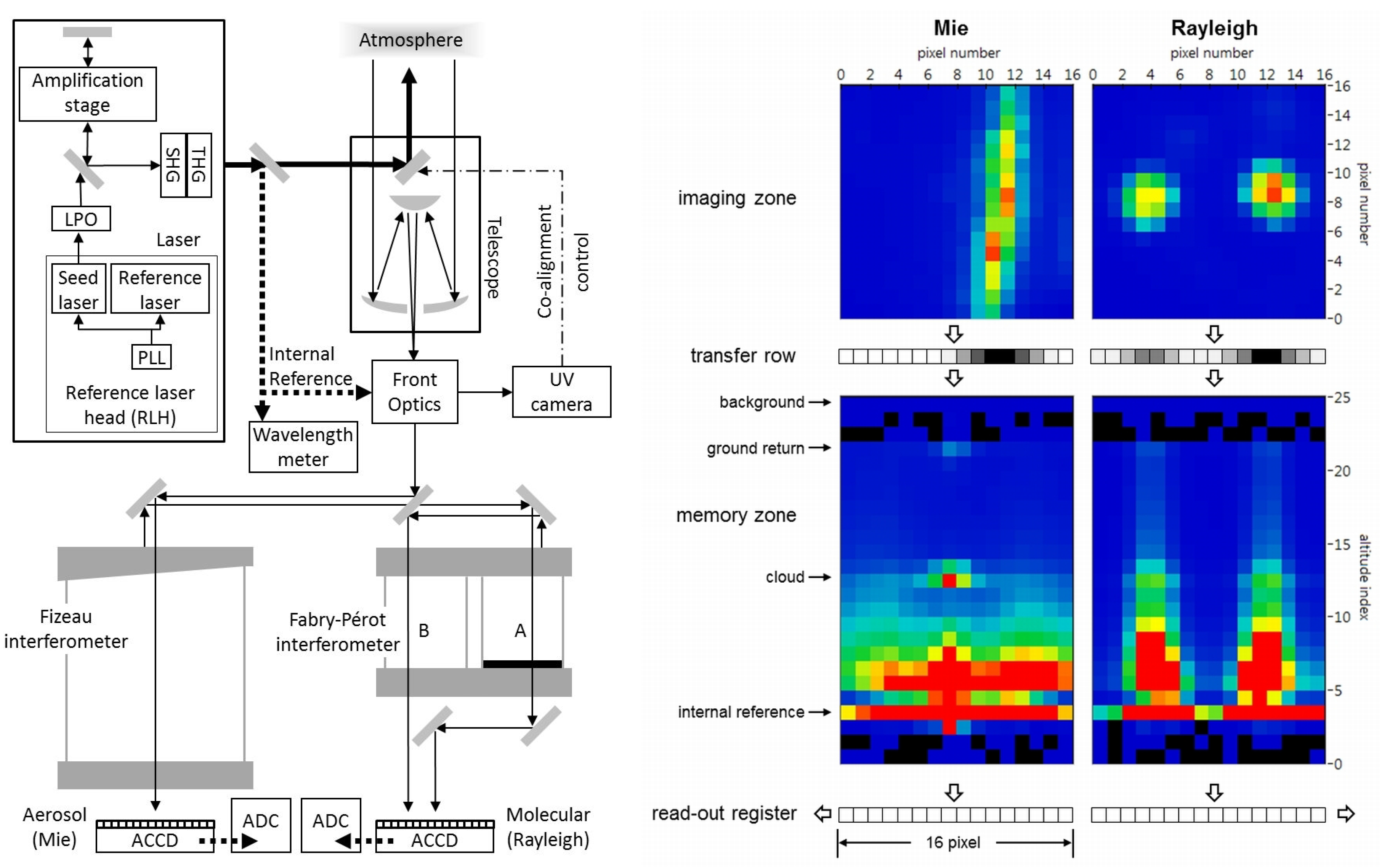
On the left of
Figure 2 the structure of the A2D and its subsystems is illustrated. The laser of the A2D is set up in a master-oscillator power-amplifier configuration using two identical continuous wave lasers in the Reference Laser Head (RLH), one acting as seed laser for the oscillator, the other one as reference laser at 1064 nm (Lemmerz et al. [
40]). Whereas the frequency of the reference laser is kept constant, the seed laser provides tunability. By optically beating the two frequencies, the frequency difference between both lasers can be controlled via a Phase Locked Loop (PLL) and set to a user-defined offset. This capability permits tuning over a frequency range of ≈12 GHz (UV) and constitutes the basis for the response calibration procedure (
Figure 1). After having passed the Low Power Oscillator (LPO), the amplification stage as well as the second (SHG) and third (THG) harmonic generator crystals, the UV laser pulse is released towards the atmosphere showing a short-term frequency stability and linewidth of 3 MHz (rms) and 50 MHz, respectively, at 355 nm (Lemmerz et al. [
40]). Part of the emitted laser pulse is redirected for Internal Reference measurements and for monitoring its exact wavelength via a wavelength meter (High Finesse WSU-10 or WSU-2). At a laser emission frequency in the UV of 844.5 × 10
Hz (i.e., a wavelength of 354.8 nm), a relative velocity of 1 m/s along the LOS results in a Doppler shift of 5.63 MHz. Here, we use the factor
k = 5.63 MHz/(m/s) to convert from frequency to velocity or vice versa. Consequently, the LiDAR system must be capable of detecting such a small frequency shift to ensure a wind measurement accuracy of 1 m/s. With the Rayleigh spectrum being more than 300 times broader and a Mie channel resolution of ≈17 m/s per pixel, this poses an enormous challenge. Therefore, the detection of photons must operate close to the shot noise limit which could be achieved by employing a novel ACCD technology. Another new design aspect applied in the ALADIN payload and the A2D is a sequential arrangement of Mie and Rayleigh receiver that can separate the signals from particle and molecular backscatter, allowing for two different ways of wind retrieval (Reitebuch [
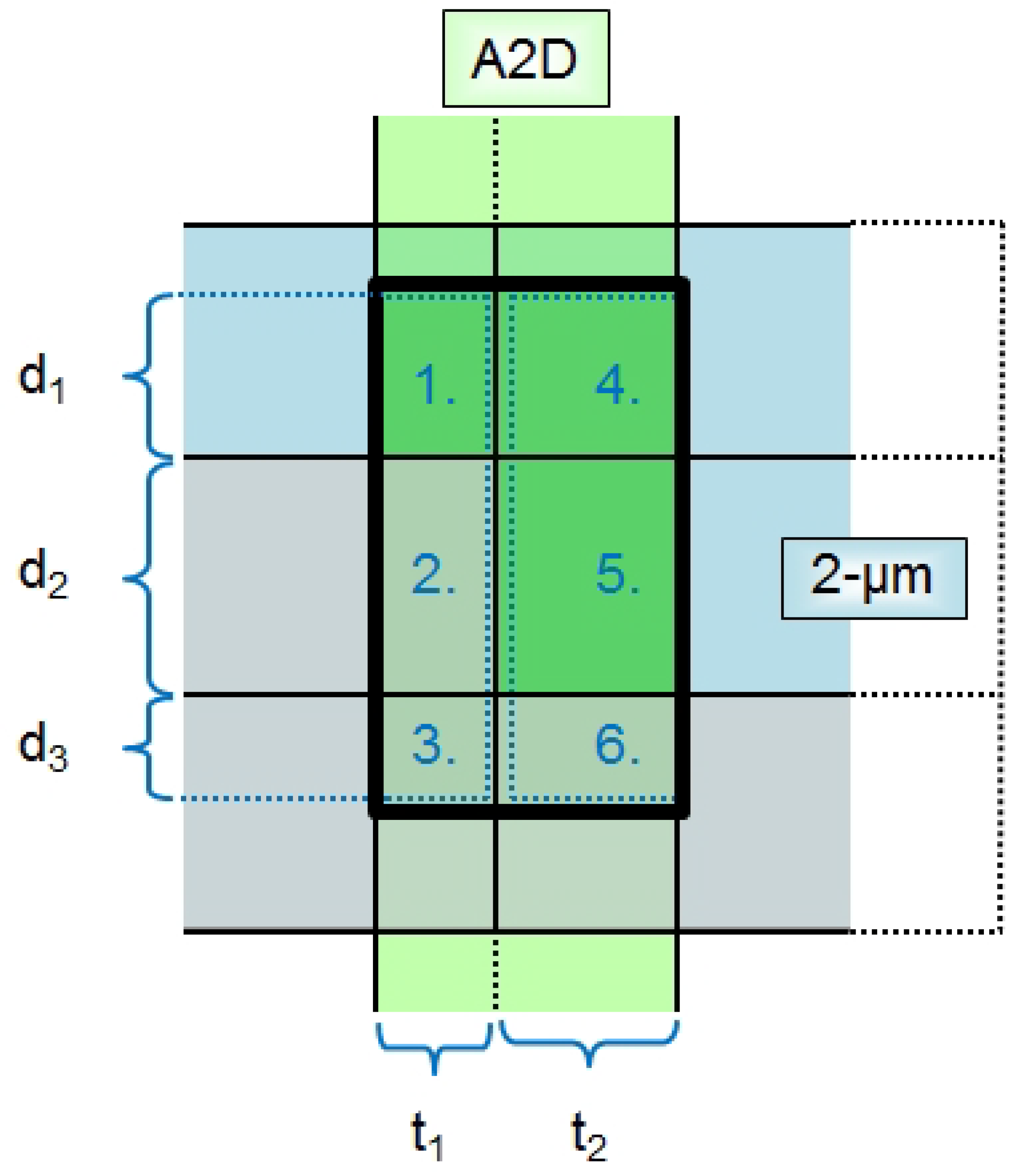
36]). Also, the sequential arrangement of the FPIs constitutes a unique feature and allows the reuse of the reflected light from the first FPI for the second one. The intensities transmitted through the interferometers are acquired by a light-sensitive imaging zone of the ACCDs (
Figure 2, right). Whereas the Fizeau wedge of the Mie channel forms a linear fringe, the FPIs produce two spots with fixed positions. The vertically summed intensities of the imaging zone are shifted via a transfer row to the memory zone whose 25 rows correspond to the range-gates of the atmospheric measurements of ALADIN including one range-gate dedicated to the solar background measurement. For the A2D, only 21 range-gates are available for atmospheric measurements. The first four range-gates are dedicated to the measurement of the Internal Reference and the detection chain offset (DCO). As indicated in the memory zone, lateral shifts of position of the fringe peak position as well as a changing intensity ratio of the spots then relate to the same frequency shift.
4. Instrument Response Calibration
According to the method explained along with
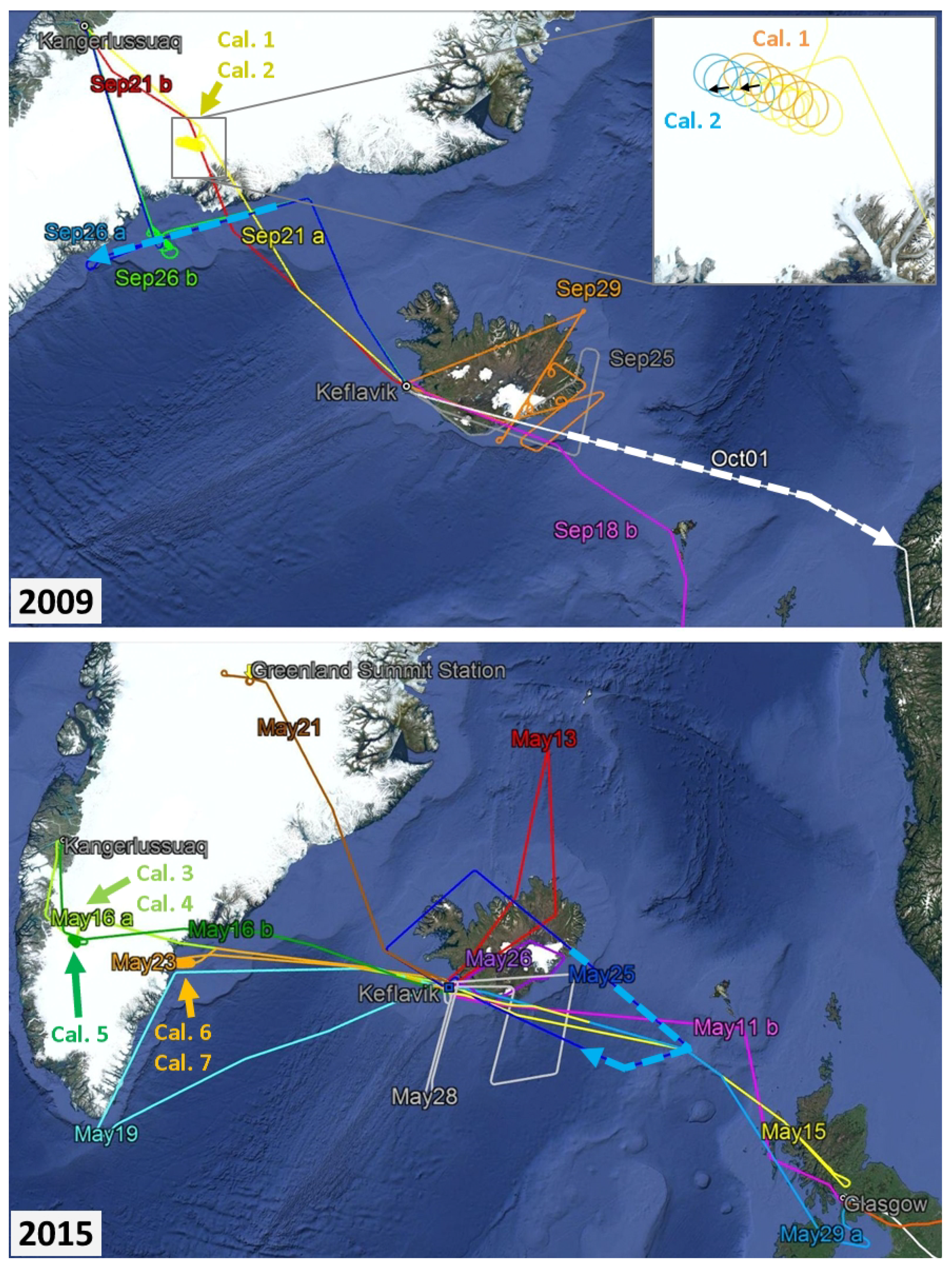
Figure 1 seven instrument response calibrations could be obtained under constant atmospheric and cloud-free conditions during the two airborne campaigns in 2009 and 2015 (
Figure 3,
Table 3). A reliable response calibration derived from strong and preferably continuous ground return signal is required for the Mie wind retrieval in particular but also for possible bias corrections in both channels. In this respect the Greenland ice shield and the sea ice close to the coast provided favorable conditions due to the high surface albedo of ice in the UV. In order to obtain an instrument response function, the frequency of the A2D laser is changed in steps of 25 MHz over a range of 1800 MHz. For comparison, the frequency range of an ALADIN response calibration comprises only 40 steps within 1000 MHz, due to the electrical power restrictions that allow the satellite to stay in nadir-pointing mode for not much longer than about 20 min.
Nadir pointing allows to avoid Doppler shifts induced by the velocity of the moving platform along the LOS direction or the horizontal wind speed in the probed atmospheric volume, thereby assuring the exclusive dependency of the instrument response on the emitted frequency during an IRC. Thus, the Falcon aircraft needs to fly right-hand bends of 20
to compensate for the off-nadir viewing angle of the A2D (see inset of
Figure 3). Easterly wind constantly pushed the aircraft towards the coast, resulting in cycloid shapes of the flight track. At nadir pointing, we additionally assume that the influence of vertical wind speeds is negligible over the time of a calibration, i.e., ≈20 min for the A2D and 16 min for Aeolus. With a speed of 200 m/s of the Falcon, the covered distance amounts up to 240 km (or an area of roughly 40 km times 70 km in
Figure 3) compared to almost 7000 km for the satellite flying at 7.2 km/s. Vertical winds are encountered in convective conditions and during gravity wave events (Witschas et al. [
16]). Accordingly, the flight planning for the A2D IRCs aims at cloud-free areas without convection. While under optimal conditions the A2D can perform about two IRCs per hour or six per research flight, the Aeolus satellite will presumably be commanded to conduct an IRC only once per week, preferably over the Arctic and Antarctica.
An IRC consists of a Rayleigh response calibration (RRC) and a Mie response calibration (MRC) always performed in parallel while distributing the backscattered light onto the spectrometers according to
Figure 2 (left). At every frequency step of an A2D IRC, the signals from the Internal Reference, the atmosphere and the ground returns are accumulated over
n = 700 pulses. While doing so, subgroups of usually 20 pulses at a time are summed up to an intermediate fragmentation of
m = 35 measurements. With a laser repetition frequency of 50 Hz and an idle time of 4 s, one step lasts 18 s, defined as an observation
o. In contrast, the accumulation time of a calibration step for Aeolus is 24 s, consisting of two observations with a duration of 12 s each and no idle time. The numbering of the A2D range-gates
i ranges from #0 - #24.
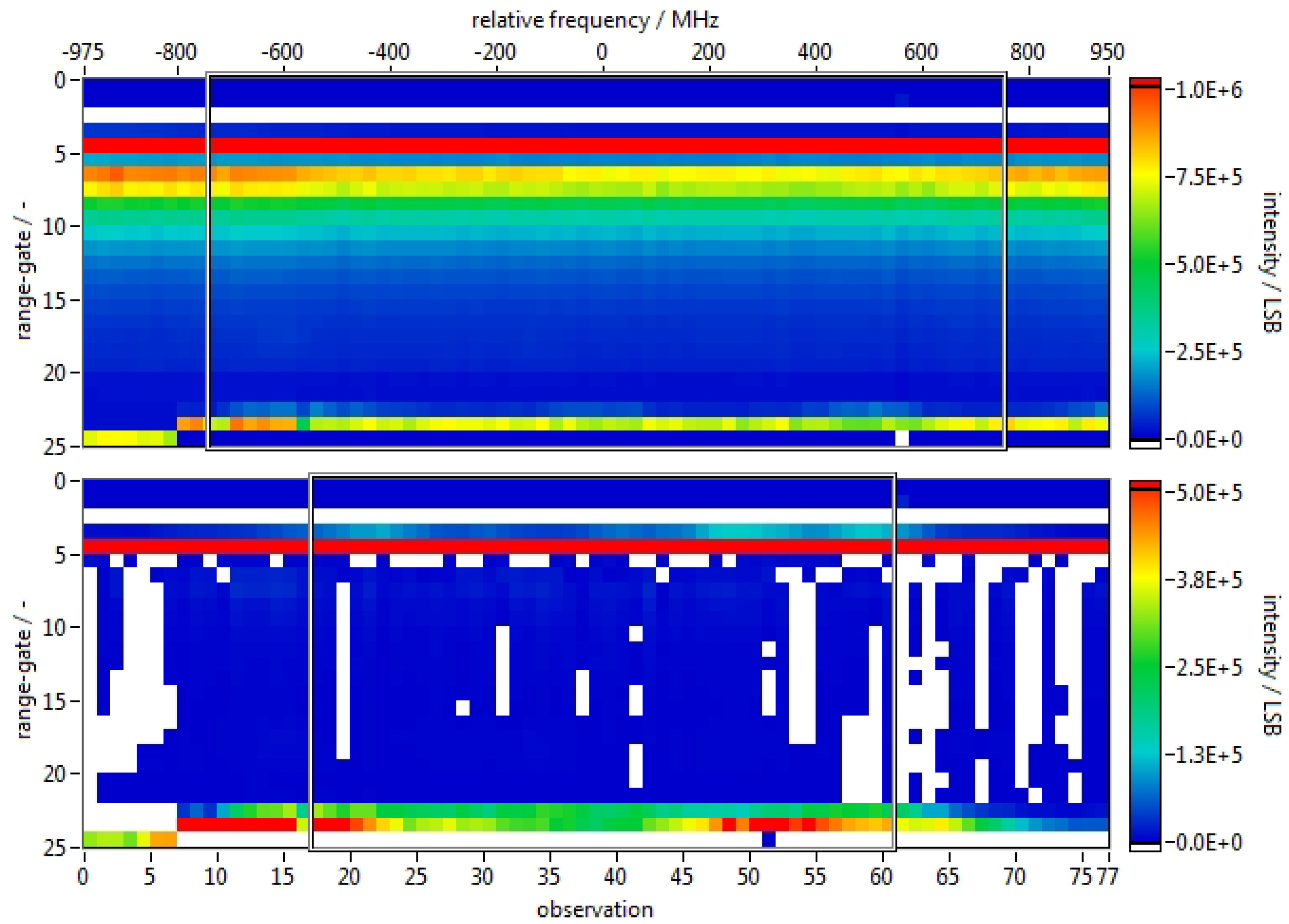
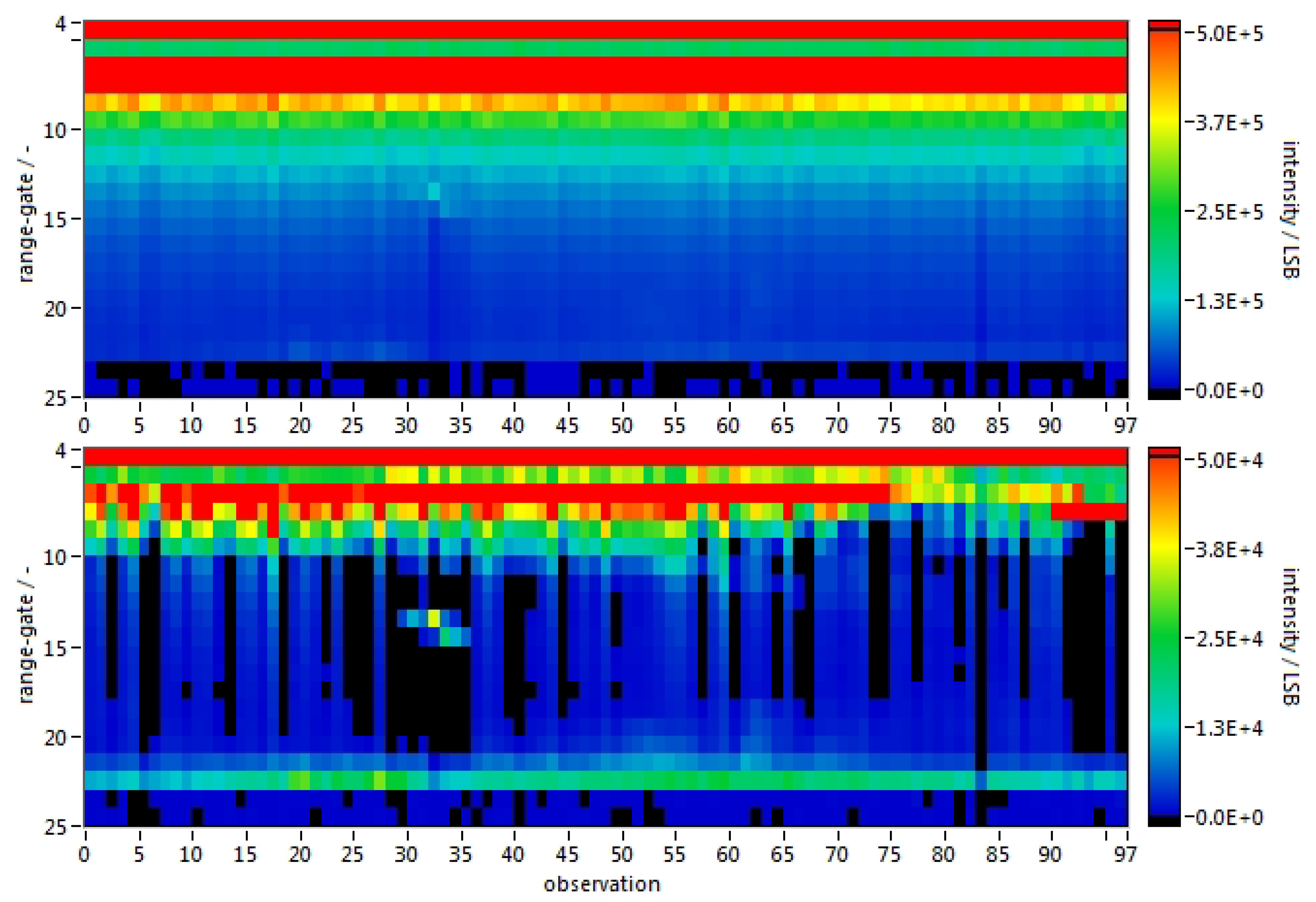
Figure 4 shows the measured intensities during IRC #7 per observation for all 25 range-gates in the Rayleigh channel and the Mie channel. The first five range-gates are dedicated to the measurement of the background signal in the 0th range-gate, the DCO in the 2nd range-gate and the Internal Reference in range-gate #4. Range-gates #1 and #3 are used as buffers towards the Internal Reference and the solar background range-gates to assure undisturbed DCO measurements. The DCO, which emanates from a voltage offset before digitization, is determined as an average over
p = 16 pixels according to Equation (
2).
Here,
I is the raw intensity recorded by pixel number
p within the 2nd row of the memory zone (
Figure 2) for the
mth measurement of an observation. The background signal for each atmospheric range-gate is obtained from the 0th range-gate according to Equation (
3) by first subtracting the DCO before scaling the resulting intensity by the ratio of the integration times of the
ith range-gate and the 0th range-gate, i.e., the background range-gate. Whereas typical integration times of the atmospheric range-gates range from 2.1
s (≈315 m in range) to 16.8
s (≈2500 m in range), the solar background signal is usually obtained over an accumulation time of 8333
s.
After subtracting the DCO and the background from the Internal Reference and the atmospheric raw intensities according to Equations (
4a) and (
4b), one obtains the actual signals
I and
I(i) per range-gate
i.
The intensities are measured in digitizer counts, so-called least-significant bits (LSB), which emanate from the conversion of signal electrons within the ADC. Equations (
2)–(
4b) are valid for both the Mie and the Rayleigh channel. Whereas Equations (
4a) and (
4b) are equivalent to the Rayleigh intensities presented in
Figure 4, an additional step was inserted for the Mie intensities by subtracting the Rayleigh background on the Mie channel. The broadband molecular backscatter appears as a rather constant offset within the narrow useful spectral range ((Reitebuch et al. [
30])) of the Mie channel and is determined via a dedicated procedure during which the laser frequency is tuned out of this useful spectral range, that is the Mie fringes are not visible on the ACCD as depicted in
Figure 2. White areas in the atmospheric range-gates of the Mie intensities in
Figure 4 are caused by variations of the molecular background on the Mie channel and the related uncertainty. The high intensities present in range-gate #4 of both channels, correspond to the Internal Reference located at flight altitude of the Falcon aircraft of ≈10.1 km. An electro-optical modulator blocks most of the strong signal from the first atmospheric range-gate #5 preventing the ACCD from saturation. From range-gate #6 downward, the quadratic range dependency is well visible in the continuous decrease of the received intensity, particularly in the Rayleigh channel. The sea ice return is prominently located in range-gate #23 and partly in range-gate #22. After observation #7 range-gate #24 lies below the ground showing just random electric noise. Apart from the ground, no obvious features, such as enhanced backscatter from clouds or aerosol layers, appear in the atmospheric signal of the Mie and Rayleigh channel. This shows that IRC #7 was conducted in a clear atmosphere and the evaluated RRC curves are not affected by cross-talk effects.
The grey boxes in
Figure 4 indicate the frequency intervals used to determine the characteristics of the response curves: 1500 MHz, i.e., 60 steps or observations, for the Rayleigh channel and 1100 MHz, i.e., 44 steps or observations, for the Mie channel.
Based on the raw intensities per measurement
m, Equations (4) and (5) combined in Equation (
1) give the Rayleigh responses
R per range-gate
i and per observation
o, i.e., per frequency step. In contrast to the FPI, where a frequency shift causes a change in transmitted intensities, this shift manifests itself as a change of the lateral position of the Mie fringe formed by the Fizeau interferometer (
Figure 2). The Mie response
R is then equivalent to the pixel position
(f) of the centroid of the detected fringe (Equation (
6)) which is determined via the Downhill Simplex fitting algorithm (Nelder and Mead [
54]; Press et al. [
55]) to fit a Lorentzian function to the filter function (Paffrath et al. [
39])).
The center of the Mie interval corresponds to the frequency where the position of the fringe leads to equal intensities on pixel #7 and #8 in the integrated ACCD signal. In a co-registration process, the so-called Rayleigh filter crosspoint is shifted to the Mie center frequency by adapting the temperatures of the FPI. The filter crosspoint is defined as the point in the Internal Reference where
I =
I (Equation (5)) and hence
R = 0 according to Equation (
1). The considered frequency interval for the Rayleigh channel of 1500 MHz (also indicated in
Figure 1) is selected symmetrically around this crosspoint.
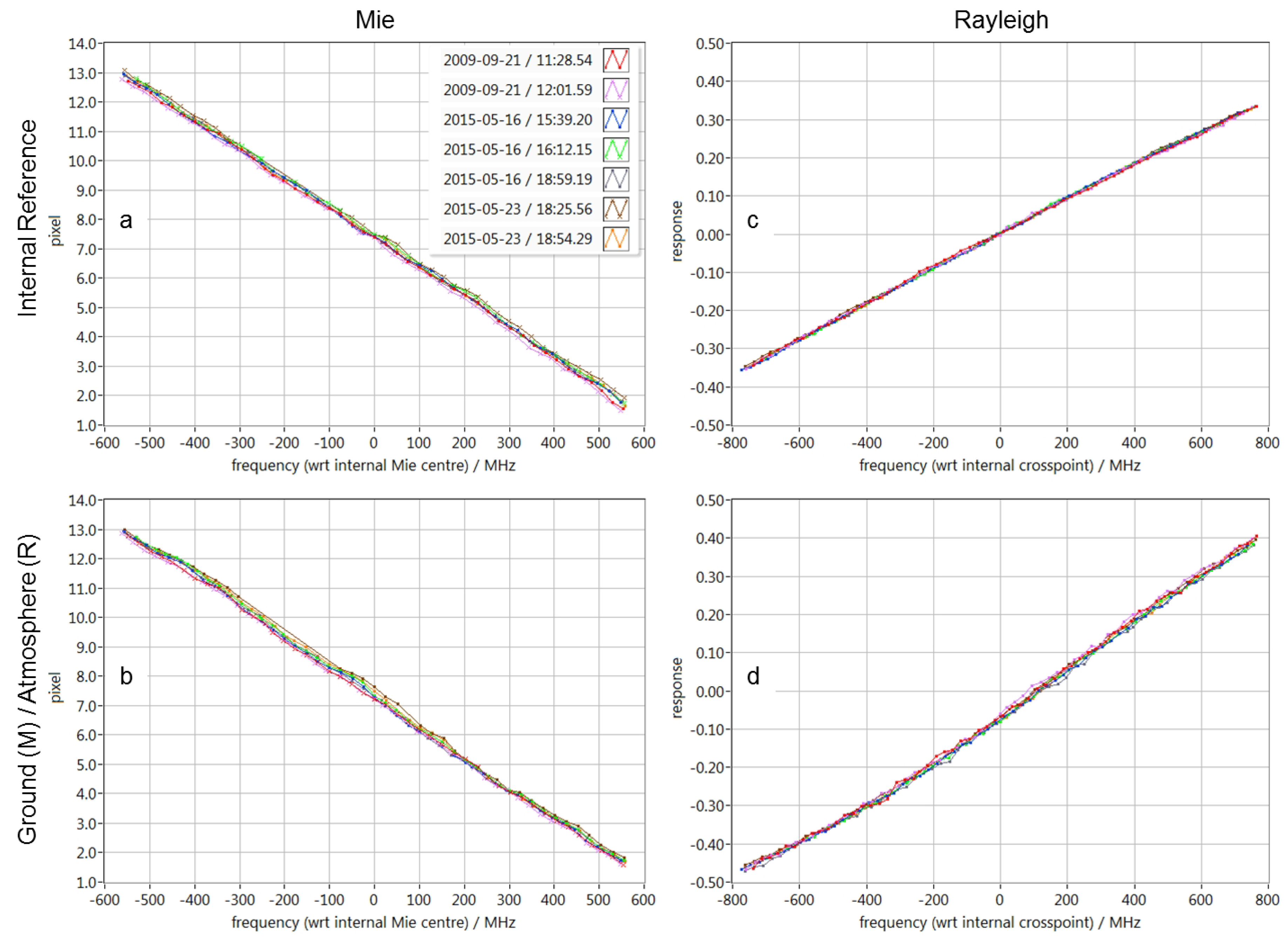
An additional correction is applied to the resulting responses at the observation level with respect to the error induced by the motion of the moving platform. Seven instrument response functions each are displayed in
Figure 5 for the Internal Reference of the Mie (top left) and Rayleigh channel (top right) as well as for the Mie channel ground return signal (bottom left) and the atmospheric molecular signal from range-gates 4.7 km from the aircraft (bottom right), corresponding to a mean altitude of 5.2 km. For convenience, the x-axes use relative rather than absolute frequencies measured by a wavemeter. Depending on the considered channel, the reference frequency at 0 MHz corresponds to the Mie center or to the Rayleigh filter crosspoint, respectively. With a sensitivity of about 100 MHz per pixel in the Mie channel, the ACCD width of 16 pixels is suitable for measurements within a frequency range of a maximum of 1600 MHz. However, a range of ±550 MHz is sufficient for our analyses and avoids strong non-linear effects when determining the fringe position at the edges of the ACCD. Due to the concept of measuring intensities, the Rayleigh channel is less restricted and permits the use of a range of ±750 MHz (±133 m/s). The atmospheric Rayleigh response functions presented in
Figure 5 are derived from range-gates of 630 m vertical thickness, 4.7 km from the instrument. Details about the analysis of A2D ground returns and in particular the respective response functions can be found in Weiler [
56] and Lux et al. [
45] where improvements on the ground detection algorithm are discussed which became necessary during the analysis of the NAWDEX campaign in 2016, but were not applied here.
While for the Internal Reference and the ground return, one response function each is obtained from the RRC and the MRC, the Rayleigh channel also allows response functions to be derived per atmospheric range-gate. Due to the narrow spectral width of the ground return signal being similar to that of the atmospheric backscatter by aerosols and clouds, the Mie response function of the ground return can be used to retrieve atmospheric wind speed. In contrast, the largely different spectral widths of the Rayleigh atmospheric and ground return signal lead to different transmitted intensities and hence shapes of the response functions, finally requiring dedicated response functions in the wind retrieval. For both channels, precise knowledge of the ground return response function is needed to correct for system inherent biases via a so-called zero wind correction, where the non-moving ground serves as a wind speed reference. In this respect, biases on whole assimilated wind curtains can be very detrimental for NWP (Horányi et al. [
57]). The compilations presented in
Figure 5 reveal only minor variations in the shapes of the response functions despite almost six years in between their recording. This underlines the long-term stability of the A2D system.
As discussed along with
Figure 1, the response
R depends on the spectral width of the molecular backscatter, i.e., on the temperature and pressure of the probed atmospheric volume (Witschas et al. [
52]; Witschas et al. [
58]). The fact that for the A2D, one calibration curve per atmospheric range-gate is derived from the RRC renders the wind retrieval less sensitive to pressure than to temperature, considering the usually encountered variations. In contrast, for Aeolus, the signal from the whole altitude range between, e.g., 6 km to 16 km, is merged into only one single RRC curve. Since IRC and wind measurement cannot be performed at the same time and mostly do not take place at the same location, the encountered temperature and pressure differences cause variations in the assignment of response to frequency (
Figure 5) and, hence, in the determined wind speed. For the A2D airborne campaigns in 2009 and 2015, the resulting systematic and random errors are negligibly small compared to other error sources such as the co-alignment or speckle noise on the Internal Reference. However, the systematic error in particular becomes significant for temperature differences of several tens of degrees between the locations of the IRC and the wind measurement. Appropriate corrections with respect to temperature and pressure described by Dabas et al. [
59] have been integrated into the Aeolus Level 2B processor (Tan et al. [
60]). In contrast to the airborne system which circles over almost the same area during an IRC (see inset of
Figure 3), an IRC of Aeolus stretches over about 7000 km preferably above the Arctic or Antarctic ice sheets, entailing respective temperature and pressure variations in the atmosphere not only on the vertical but also on the horizontal scale.
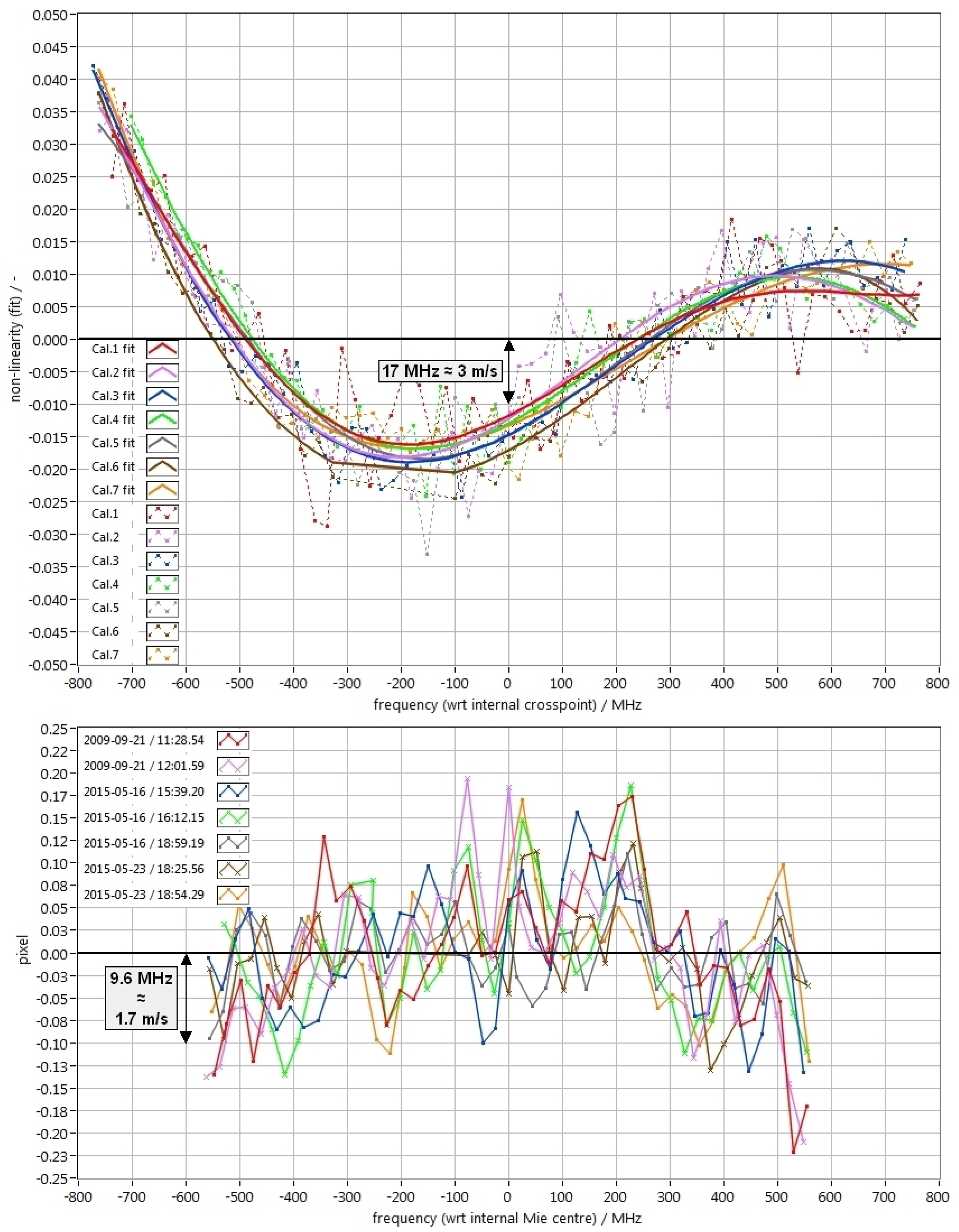
Subtracting linear fits from the response functions in
Figure 5 reveals the structure of their non-linearities in more detail (
Figure 6). In contrast to the Mie response functions, which can be well described by linear fits, the Rayleigh response functions require a higher order fit to mimic their slightly undulated shape with sufficient accuracy. This is especially the case for the molecular signal from the atmosphere which exhibits a much broader spectral width than the Internal Reference. Currently the Rayleigh response functions are approximated by a 5th-order polynomial fit via an LU (lower-upper) decomposition algorithm (Press et al. [
55]). In particular, the odd order of the polynomial takes into account the seemingly point-symmetric shape of the response functions with their sole inflection point. Polynomial orders lower than 5 could not reproduce the shape of the response functions well enough whereas higher orders tended to introduce non-meaningful oscillations. Additionally, the fits by 5th-order polynomials lead to reasonably low residual errors (
Figure 7). More information is available in Marksteiner [
61].
The polynomial coefficients
c from Equation (
7) are compiled in
Table 4. The linear shape of the Mie response functions can be described by
with
c and
c being the intercept and the slope (or sensitivity) compiled for the individual IRCs in
Table 5.
Obviously, the values of the coefficients in
Table 4 become smaller with increasing order of the coefficient (i.e., smallest values for
c). The higher the order of the coefficient, the more sensitive it is with respect to slight changes either in the shape of the response curve or of individual response values. The coefficients of the fits are constantly monitored and coarse outliers (such as the large
c for the Internal Reference of IRC #2) can indicate issues with an IRC that result in slightly different characteristic of the response function. Among others, such information can be consulted to assess the quality of a specific response function in comparison to other response functions. However, the IRCs undergo an already strict quality control before being fitted, so that in most cases the outliers cannot be traced back to a certain root cause anymore. Certain patterns become apparent in
Table 4 such as a predominant sign or an order of magnitude for each coefficient. For instance, the 6th RRC is the only one showing a
c coefficient with a positive sign for the Internal Reference (1.25 × 10
MHz
). Another example would be the by far largest
c coefficient (slope) found for the atmosphere from the 2 th RRC (6.44 × 10
MHz
). Regarding coefficient
c, which represents the intercept, large relative differences for the Internal Reference in
Table 4 can emanate from changes in the temperature setting of the Rayleigh spectrometer. However, this will not affect the resulting wind speed as the wind speed is derived as a difference to the atmospheric response, which in turn is affected by the same temperature change.
Considering the conversion factor k and a mean slope for the Mie Internal Reference of −10.06 pixel/GHz, the according of 0.32 pixels translates into 5.65 m/s. This difference between the response functions cannot directly be interpreted as an equivalent difference in the final wind speeds. Instead, the wind retrieval uses the differential information between Internal Reference and ground return response function. The intercepts of the ground return show the same pattern as those of the Internal Reference, that is, for instance, the largest intercept is found for IRC #6 and the smallest for IRC #2, and with a mean slope of −10.33 pixel/GHz the of the ground return of 0.27 pixels corresponds to 4.64 m/s. Thus, the expected bias variation between wind speeds obtained from the same wind measurement but with different Mie response functions is assumed to be in the order of less than 1 m/s.
The application of a 5th-order polynomial fit to model the shape of the Rayleigh response function is an approximation based on an empirical approach. Regarding the Mie channel, fairly regular undulations can be observed in
Figure 6 that are assumed to be related to the special layout of the ACCD being based on 16 × 16 pixels. With the width of 1 pixel being equivalent to about 100 MHz or 17 m/s LOS wind speed, the random structure of the Mie non-linearity function can cause errors, depending on the actually measured wind speed, i.e., fringe position. The implementation of an adequate, more sophisticated, fitting procedure (apart from the linear fit) for the Mie non-linearity part is currently being investigated. As confirmed by analyses of data from a current airborne campaign, a third order polynomial fit significantly reduces the standard deviation of the Mie residual error at a first step.
The ability of the A2D to perform IRCs over an increased frequency range of about 1.8 GHz compared to the 1 GHz of Aeolus, brings the advantage of more stable coefficients determining the shape of the response functions. However,
Table 4 and
Table 5 still show variation of the individual coefficients. Reasons can be found in the dominant known noise sources such as the Poisson noise and speckle noise but also in the variations in the co-alignment of the outgoing laser beam and telescope viewing direction, the uncertainty in the frequency measurement or the imprecise localization of the crosspoint, that have been verified in an extensive noise study (Witschas et al. [
62]). Speckle noise, in particular, affects the A2D measurements due to an optical fiber that guides the Internal Reference signal, whereas ALADIN features free path propagation of the laser beam.
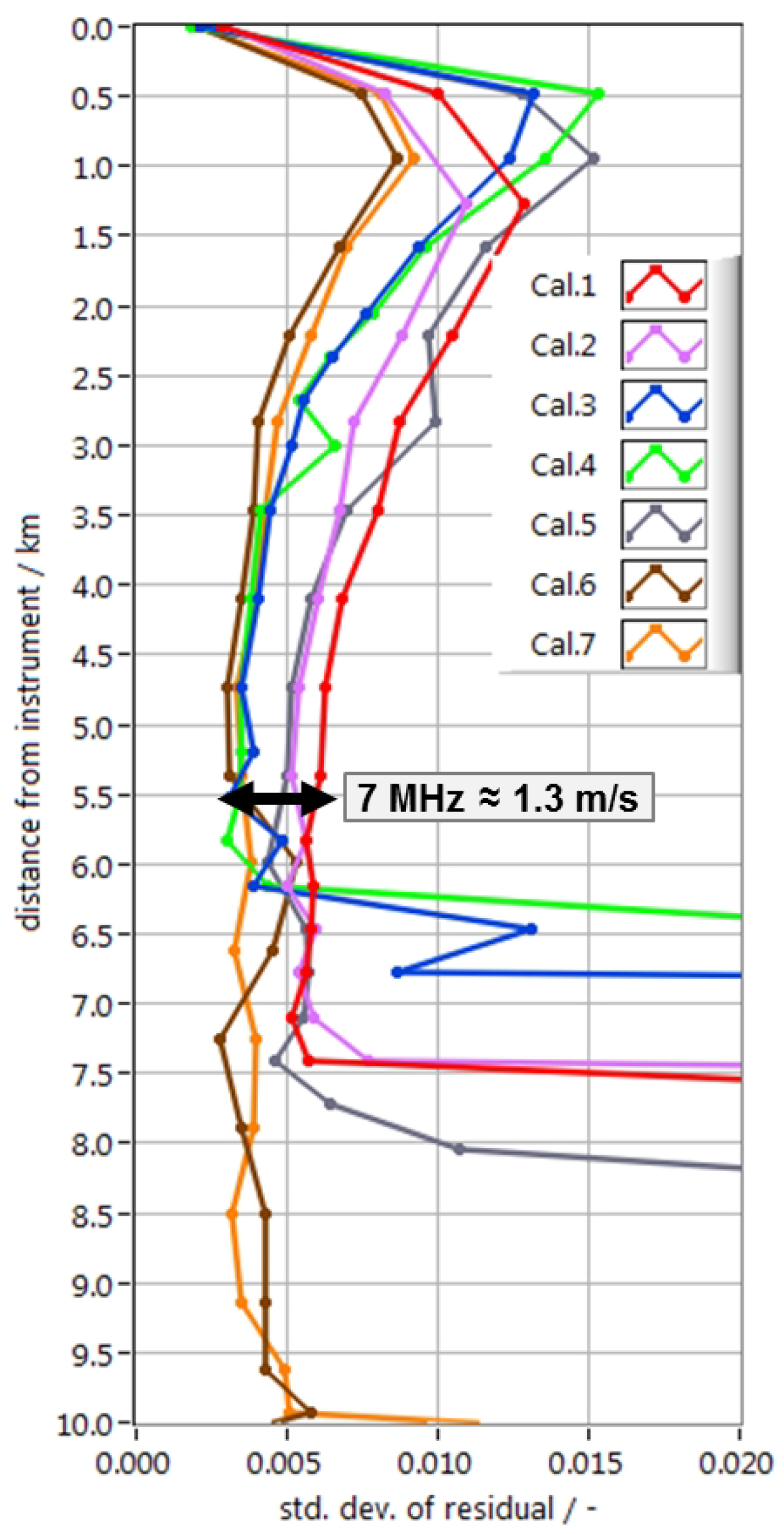
After subtracting fitted 5th-order polynomials from the RRC curves (Marksteiner [
61]), residuals with rather random behavior remain. The standard deviation of these residuals is displayed for each range-gate in
Figure 7. At the top, the Internal Reference shows the lowest standard deviation with response values between 0.0018 and 0.0029. This corresponds to 4.1 MHz and 6.4 MHz when, as a good first estimate, applying the mean slope of the Internal Reference response functions presented in
Figure 5 of 0.454 GHz
. Converted with the factor
k, the resulting 0.72 m/s and 1.1 m/s, respectively, correspond to the remaining random error which is propagated from the response calibration of the Internal Reference towards the final wind speed measurements.
For all calibrations, a range dependency of the random error of the residual is visible, showing a maximum within the first atmospheric range-gates followed by an asymptotic approach towards a response value of around 0.004 with increasing distance from the instrument. Considering a mean slope of the Rayleigh atmospheric response functions (
Figure 5d) of 0.582 GHz
, this corresponds to 1.2 m/s. The gradient in the random error of the residual is mainly provoked by an interplay of laser beam pointing variations with the overlap function of telescope field-of-view and laser beam. As the FPI has been shown to be particularly sensitive to the variation of input angles (Witschas et al. [
62]), it is essential that the co-alignment of the two optical axes of the telescope and outgoing laser beam (monostatic biaxial LiDAR) is optimized by a dedicated control loop. In addition, the electro-optic modulator is still partly closed during the acquisition time of the first atmospheric range-gate to protect the ACCDs from damage by reducing the strong backscatter intensity emanating from the near field. The mentioned effects render most of the retrieved wind measurements in the near field unusable, resulting in an exclusion of the first three atmospheric range-gates from scientific reasoning and statistical comparisons. In contrast, the winds obtained by Aeolus are not subject to such drawbacks since this satellite mission exclusively measures in the far-field on the one hand and features a monostatic coaxial transceiver on the other hand. Coming from flight heights of 8 km–10 km, the Greenland ice shield with altitudes of more than 3 km successively blocks the lowest range-gates between 6 km and 8 km distance from the instrument. Therefore, no data is available in that region except for calibrations #6 and #7 which reached down to the sea surface. At medium ranges of about 5 km, the standard deviation varies among the calibrations in the order of 7 MHz (1.3 m/s). Despite the mentioned stability of the A2D system, IRCs from 2009 cannot be used for wind retrieval from measurements recorded in 2015 and vice versa. Owing to differences in the alignment in between the two campaigns as well as to drifts during the individual campaigns, the characteristics of the response functions differ especially in the near field of the A2D, that is the region of incomplete telescope overlap within the first 2–3 km from the instrument (
Figure 7).
7. Wind Measurements
Overall, we performed and analyzed more than 27 wind measurement scenes from the two airborne campaigns with lengths between 10 min and 88 min at a stretch (
Figure 3). The three wind measurements discussed in the following were selected as showcases for long flight paths including many observations, for high wind speeds and large wind speed ranges as well as for varying aerosol or cloud conditions. Analyses of further wind measurements from 2009 and 2015 can be found in Marksteiner et al. [
65] and Reitebuch et al. [
66].
Figure 11 exemplarily presents the A2D and 2-µm wind speeds derived from the backscatter signals (
Figure 9) measured on 26 September 2009, (Marksteiner et al. [
64] and Marksteiner [
61]). By using its ability to perform conical scans, the 2-µm LiDAR determined three-dimensional wind vectors which had to be projected onto the A2D LOS. Very good agreement can be found in terms of wind field structure, gradients, minimum and maximum wind speed, and location of special features. LOS wind speeds of up to 24 m/s are detected by all three wind measurements in the upper right region, indicating a part of the jet stream. The small cloud mentioned regarding
Figure 4 can be found at the same location in the A2D Mie and the 2-µm wind field. Also, the influence of the katabatic winds with their elevated aerosol load is visible in the middle of the scene between sea surface and 2 km. The way the winds obtained from the molecular backscatter close the gap in the wind field determined from the aerosol signal (bottom, white), perfectly shows the complementary nature of the Mie and Rayleigh channel of the A2D. Such a high coverage with wind measurements throughout the troposphere and lower stratosphere, only missing below optically thick clouds, justifies the increased effort in terms of calibration activities for a direct-detection LiDAR. However, the large amount of winds derived from molecular return comes at the expense of increased random errors compared to the 2-µm DWL.
A statistical comparison of A2D Rayleigh and 2-µm winds (
Figure 11, right) including a linear fit reveals a slope of 1.02 (light blue bold line). Comparing A2D winds based on molecular return against 2-µm winds seems to be an odd approach when considering the effect of particulate backscatter from clouds or aerosols on the systematic error of the measured Rayleigh response (Dabas et al. [
59]). However, the much higher sensitivity of the coherent 2-µm LiDAR with respect to particulate backscatter enables it to obtain wind measurements from regions with very low aerosol loads that are far from noticeably affecting the Rayleigh response. As an additional step of quality control, Rayleigh bins showing unusually high integration time-corrected and range-corrected intensities are invalidated according to Marksteiner [
61]. We emphasize that we make use of a least squares straight-line fitting algorithm which allows for consideration of errors on both coordinates according to Press et al. [
55]. Therefore, we estimated the general random errors of the 2-µm and the A2D winds to be 1 m/s and 2.5 m/s, respectively, (Marksteiner [
61]), recently supported by the works of Chouza et al. [
42] and Witschas et al. [
16] assessing the performance of the 2-µm LiDAR. The faster and simpler approach typically applied to determine linear fits is to assume an error-free parameter on the x-axis.
Table 6 summarizes the different slopes and intercepts resulting from linear fits through scatterplots for the three selected wind measurement scenes. It gives an impression of the implicitly accepted error (here in the assessment of the A2D performance) by assuming perfect wind measurements by the 2-µm LiDAR, which can amount up to 5% slope error as found for 26 September 2009. Generally, the slopes and intercepts derived from fit, including the errors on both coordinates, are much closer to the case of
= 0 m/s than to the more unrealistic case of
= 0 m/s. Except for Marksteiner [
61], all slopes derived from such statistical comparison published in the past are based on the assumption that the 2-µm winds are error-free, i.e., they correspond to the left column of
Table 6. Furthermore, the statistical comparison reveals a mean bias of −0.57 m/s, a correlation coefficient of 0.84, a standard deviation of 2.35 m/s and a mean absolute deviation of 2.13 m/s (
Table 7). A negative mean bias implies that on average the A2D winds are smaller than the 2-µm winds. The median absolute deviation (MAD) is defined as
with
being the differences between A2D and 2-µm winds. By multiplying the MAD with the factor of 1.48 (Huber [
67]), it becomes a consistent estimator for the standard deviation in the case of a normal distribution. The MAD is given here as an additional parameter since the standard deviation is enhanced by the presence of outliers for a non-Gaussian distribution of the wind speed differences.
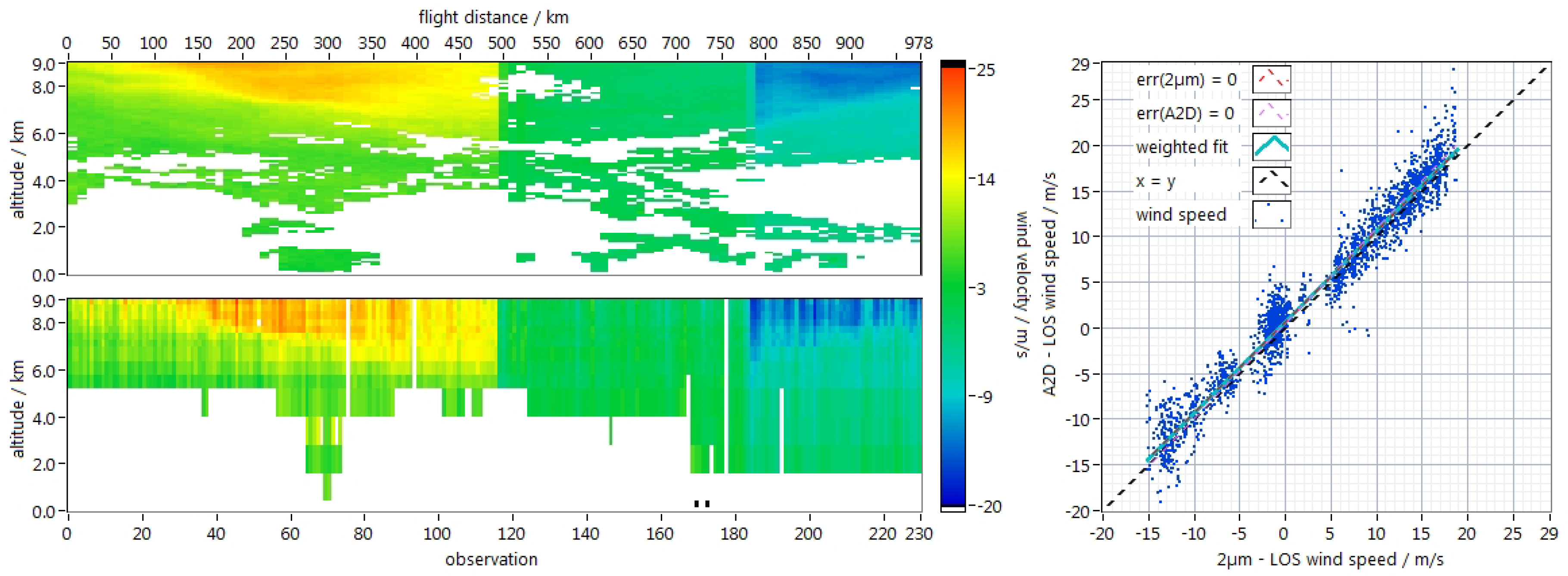
A comparison between 2-µm winds and A2D Mie winds for 1 October 2009, is presented in
Figure 12. During this measurement period, the 2-µm LiDAR was operated with a fixed LOS, viewing in the same direction as the A2D, i.e., with an off-nadir angle of 20
. The flight leg stretched across the North Sea from the coast of Iceland to the coast of Norway (
Figure 3, top). On the upper left, at the start of this scene, the jet stream with LOS wind speeds of up to −24 m/s was intersected. Here, the aerosol load was too low for a retrieval of valid A2D Mie winds but high enough for the 2-µm LiDAR. An impressive similarity between the two scenes is found in terms of the wind field structure. At altitudes between 3 km and 5 km and between observations 45 and 90, both LiDARs sensed a large optically thin cloud which the laser beams were able to penetrate, thus providing further wind measurements from a second cloud layer below. Optically thick broken clouds are distributed along the whole scene with varying cloud top height from less than 1 km (e.g., observation 25) up to 5 km (e.g., observation 125). The effect of a slight turn of the aircraft (white dashed arrow in
Figure 3, top) by ≈15
in heading angle is best visible as a small step in the wind speed measured by the 2-µm LiDAR at a flight distance of 625 km (
Figure 12, top left). Considering 2-µm winds as the truth, higher LOS wind speeds (−10 m/s–0 m/s) are obviously underestimated by the A2D Mie channel (computed with calibration #2) whereas below −10 m/s the A2D Mie channel tended to measure higher (regarding the absolute value) wind speeds than the 2-µm LiDAR. One possible explanation is discussed by Sun et al. [
68] who elucidate the performance of Aeolus in heterogeneous atmospheric conditions, i.e., in cases where atmospheric dynamics and optical properties vary strongly within the sampling volume.
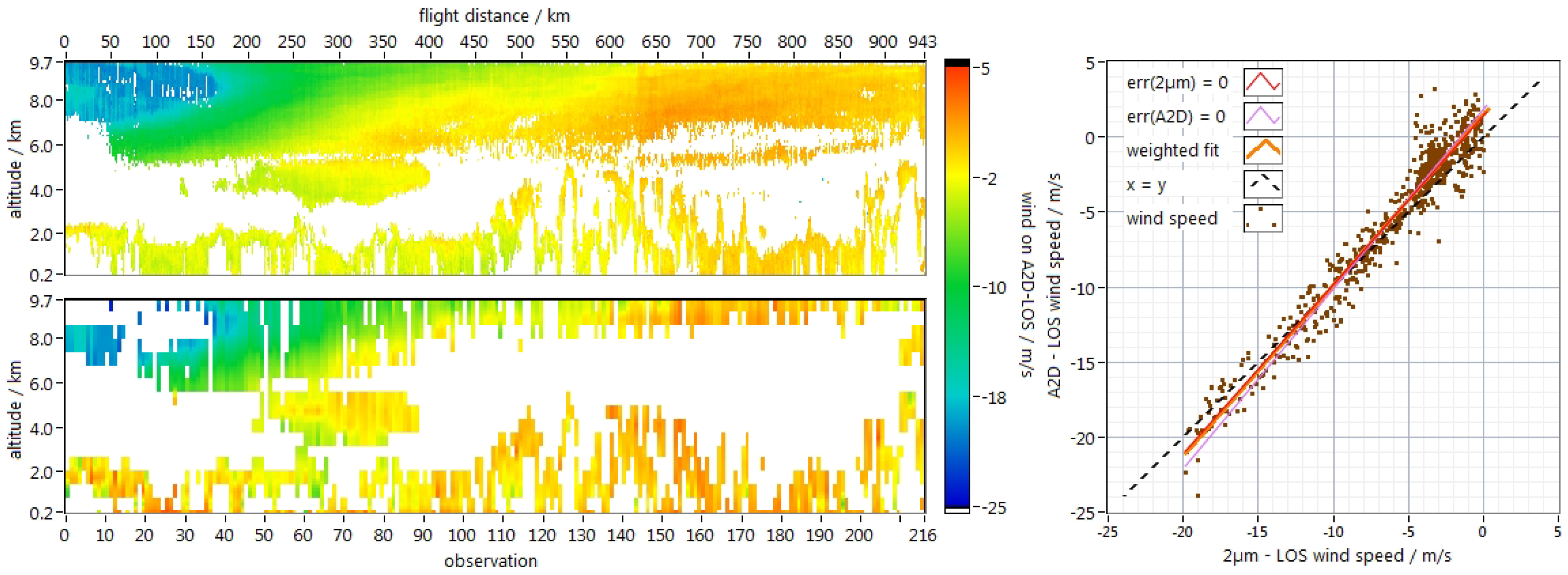
The longest A2D wind measurement scene with 88 min at a stretch was obtained on 25 May 2015 (
Figure 13). In contrast to the two previous scenes above, this one comprises three flight legs of different length and with different aircraft heading directions. Aiming at detecting the jet stream, the flight track reached out half way towards Scotland initially in the southeasterly direction, before heading back towards Iceland in the opposite direction after two turns (
Figure 3, right). These three segments are reflected in the three different wind field sections with the middle part located between observations 116 and 183 in
Figure 13. With the A2D pointing to the right of the aircraft, strong positive (i.e., towards the instrument) LOS winds could be measured in the jet-stream region between 6 km and 9 km during the first segment. Accordingly, strong winds with negative sight were present for the third segment. The range of LOS wind speeds from −20 m/s up to 25 m/s is the largest measured by the A2D during a single flight. While flying against the jet stream in the middle segment, hence pointing perpendicularly to it, the A2D measured almost zero wind speed. No signal was obtained from below the optically thick clouds present at heights of around 5 km, particularly during the first and second segment. The measurements from within the clouds are biased due to contamination by strong Mie signal on the Rayleigh channel. Just as for
Figure 11, only very low aerosol load and no clouds are present in this scene, which allows for a comparison of these two wind fields that are measured by different methods and based on different scattering mechanisms. Towards the end of the flight, from observation #170–#230, a large area without aerosol is present between 2 km and 5 km altitude where only the A2D Rayleigh channel was able to measure wind. The large range of wind speed strongly stabilizes the linear fit coefficients with respect to the different errors of the two LiDAR systems as can be seen exemplarily for the slope and intercept from
Table 6.
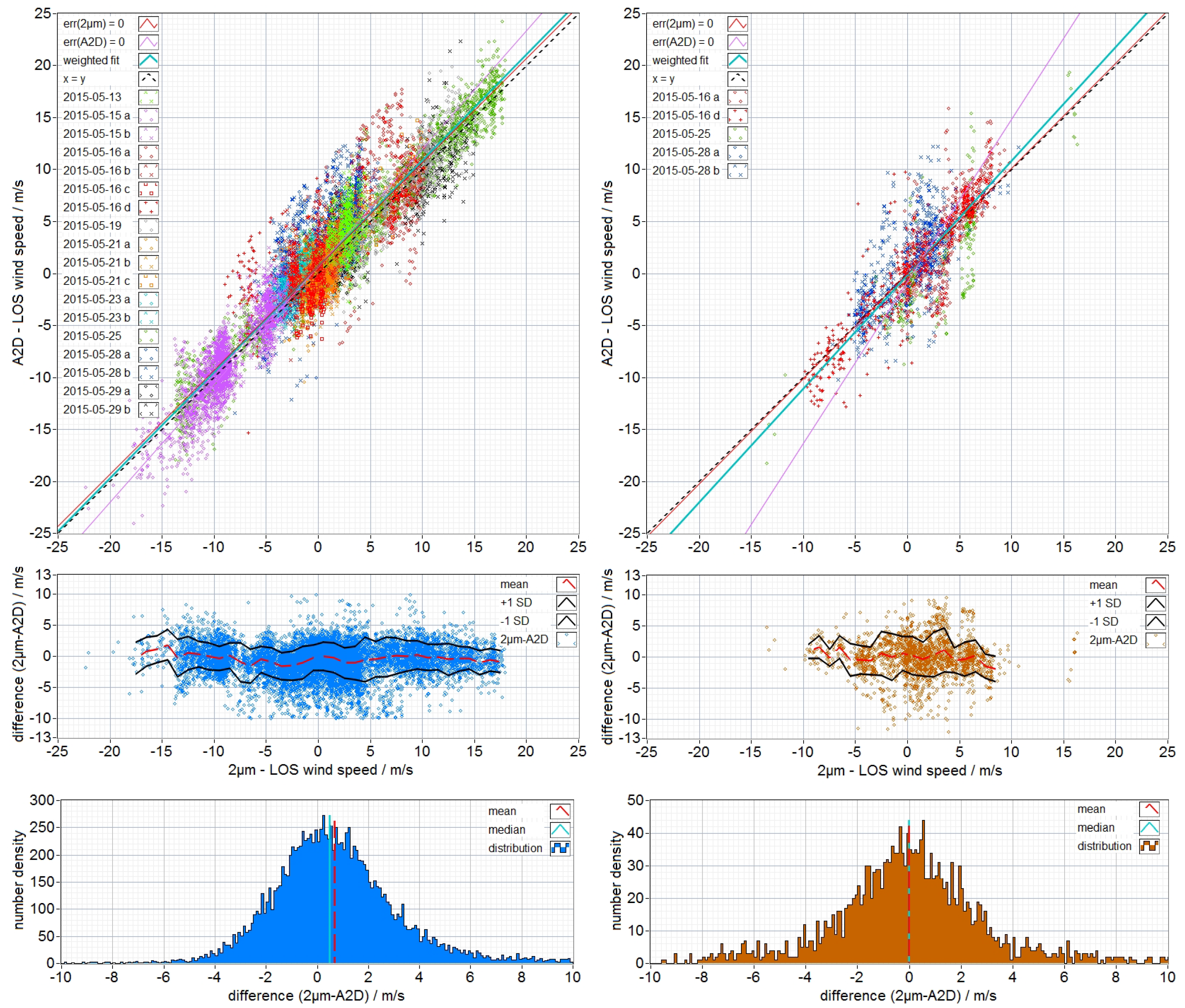
An overall statistical comparison of the winds derived from the A2D and the 2-µm LiDAR gives an estimation of the performance of the Mie and Rayleigh channel during the airborne campaign in 2015 (
Figure 14). The sole usage of calibrations #3 and #7 for the Mie and Rayleigh channel, respectively, to process all these wind scenarios assures consistency in the statistical comparisons and essentially avoids additional errors that would be introduced by applying various calibrations (see
Figure 8). Apart from a significantly larger number of bins entering the statistical comparison, the Rayleigh channel also enabled us to obtain a higher wind speed range than the Mie channel. Differences in wind speed between the A2D and the 2-µm LiDAR reach about ±12 m/s peak-to-peak for both the Mie and Rayleigh channel (
Figure 14, middle) and show no clear wind speed-dependent bias. At the bottom, the probability density function of these differences is given. Regarding the Rayleigh channel, the distribution is slightly skewed as well as biased by 0.68 m/s (
Table 7). The distribution for the Mie channel is broader, even including a small secondary maximum on its negative tail, thus, more clearly deviating from a Gaussian distribution which renders the allocated MAD the more credible figure compared to the standard deviation. Supported by many measurement scenes with rather small wind speed ranges, the seemingly vertical “striping” within the Rayleigh and Mie scatterplots at the top of
Figure 14 indicates that the major contribution to the random error in these comparisons is induced by the A2D observations. Caused by very low aerosol content in the marine atmospheric boundary layer over the North Atlantic which additionally had been blocked several times by opaque cloud layers above, the Mie channel could provide only about a sixth of the bins entering the statistical comparison (1958) compared to the number of the Rayleigh channel (12,647). From this perspective, much more favorable conditions for Mie wind measurements could certainly be expected from flight in the tropics, during various desert dust events or volcanic eruptions. However, two more facts must be considered. On the one hand, we intentionally aimed at measuring in cloud-free conditions during both airborne campaigns to maximize the number of Rayleigh winds for a more reliable characterization of the Rayleigh channel. On the other hand, it is inherent to the Mie channel that in the case of optically thicker clouds, we usually receive a backscatter signal only from the uppermost one to three range-gates that overlap with the cloud.
Finally,
Table 7 summarizes the statistical parameters derived from the presented wind speed comparisons (
Figure 11,
Figure 12 and
Figure 13). In addition to the number of compared wind speed bins (pairs), the mean bias, the slope, and the correlation coefficient, also given are the standard deviation and the MAD. For all statistical comparisons, we excluded the topmost three A2D range-gates from the wind scenes. Retrieved winds from that region are mainly biased due to the sensitivity of the interferometers to variations in the incidence angle. Regarding the coverage ratio for the A2D bins by valid 2-µm winds, we use a minimum threshold of 80% (
Figure 10). Thereby, it is assured that wind observations which are input to the statistical comparison are not biased in the case of strong (particularly vertical) wind gradients. The significant positive linear relations between winds measured by the 2-µm LiDAR and the A2D are indicated by correlation coefficients of r > 0.81 and r > 0.94 for the Mie channel and the Rayleigh channel, respectively. As can be seen exemplarily for the Mie wind comparison for 1 October 2009, the slopes can deviate considerably from the ideal value of 1.0 for single flight sections due to the influence of small wind speed ranges in coaction with the allocation of random errors. Both the mean bias and standard deviation values given in
Table 7, have to be seen in the context of the estimated performance of the 2-µm coherent detection LiDAR with a precision of <1 m/s and a bias of <0.3 m/s (Chouza et al. [
42], Weissmann et al. [
41], Witschas et al. [
16]). It is emphasized that the statistics in
Table 7 are subject to the results from the IRC comparison (
Figure 8) that highlighted the delicate dependence of the final wind speeds on the IRC selected for wind retrieval. Statistical results regarding A2D wind observations obtained by Lux et al. [
45] are similarly derived from single flights with a maximum of 352 wind pairs in the Rayleigh channel and 1246 pairs in the Mie channel. However, the analysis presented here is based on a significantly higher number of wind pairs for comparison (12,647 in the Rayleigh channel and 1958 in the Mie channel), thus providing increased confidence in the results.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}