Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations

Abstract
:
1. Introduction
2. Mathematical Model
3. Data Processing
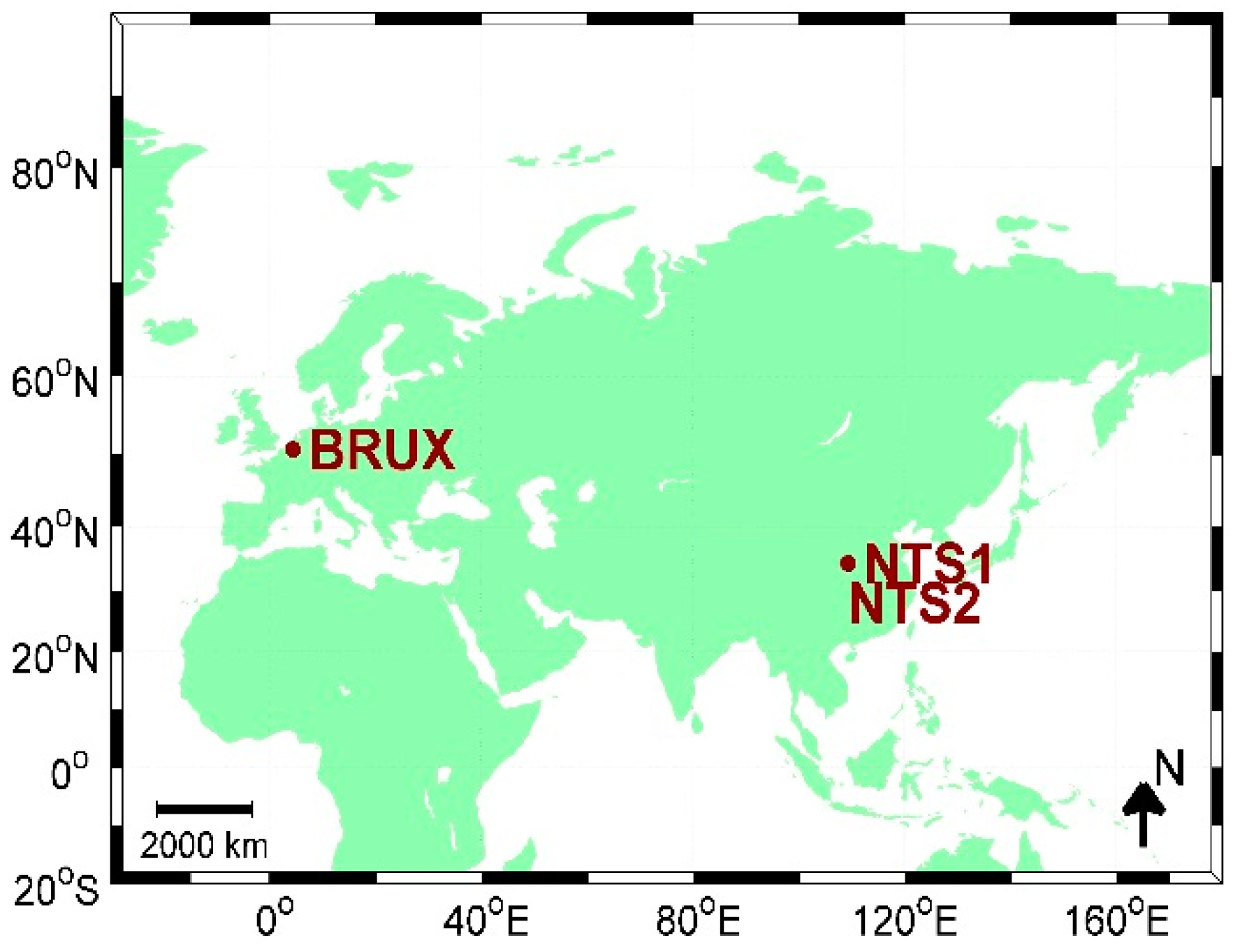
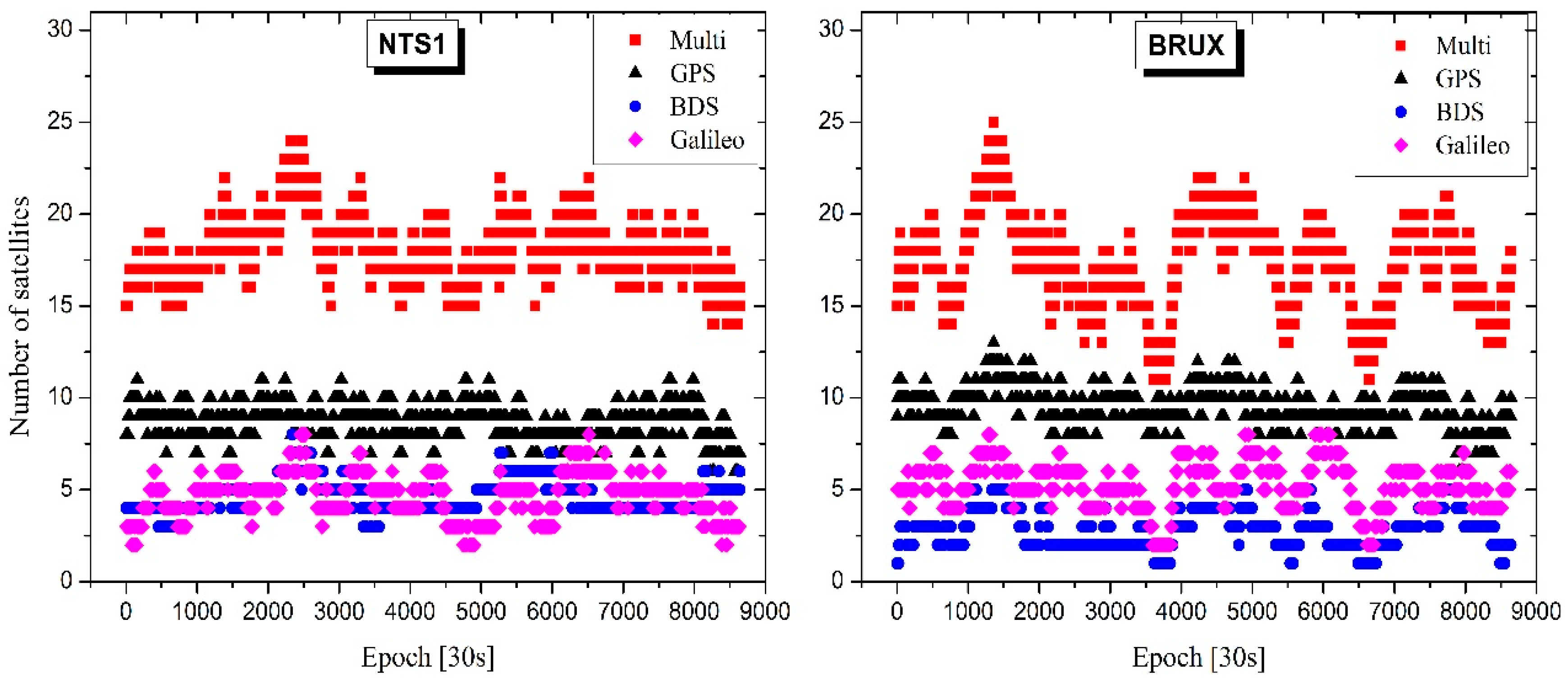
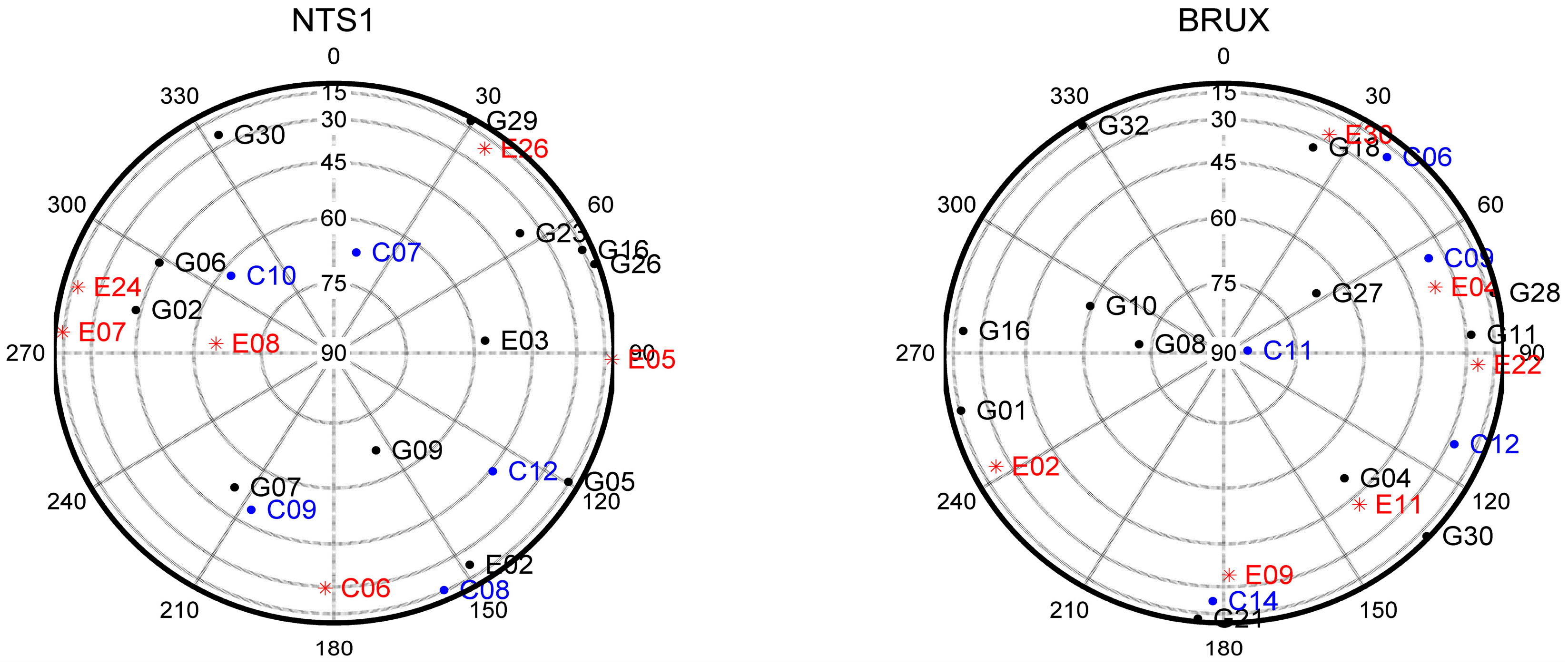
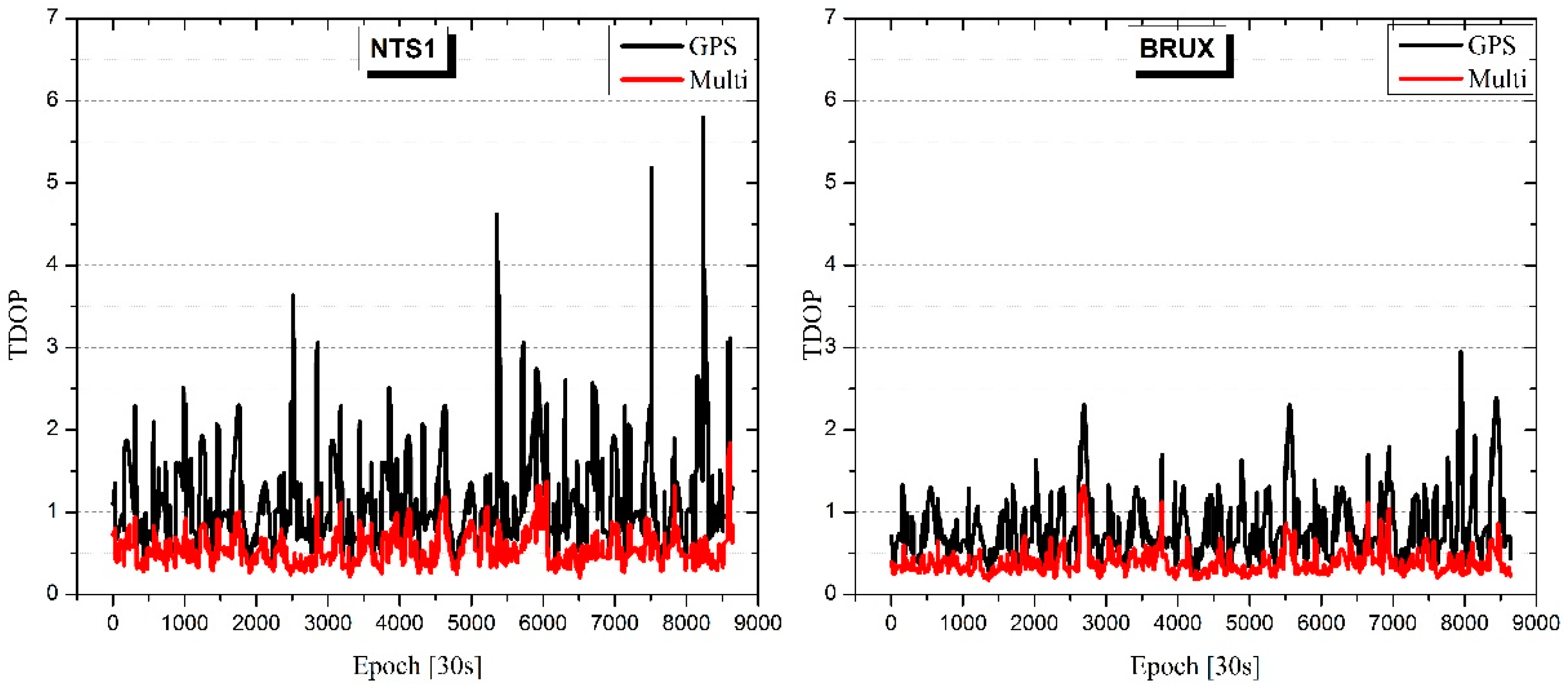
3.1. Experiment Design
3.2. Data Processing Strategy of Combined Multi-GNSS
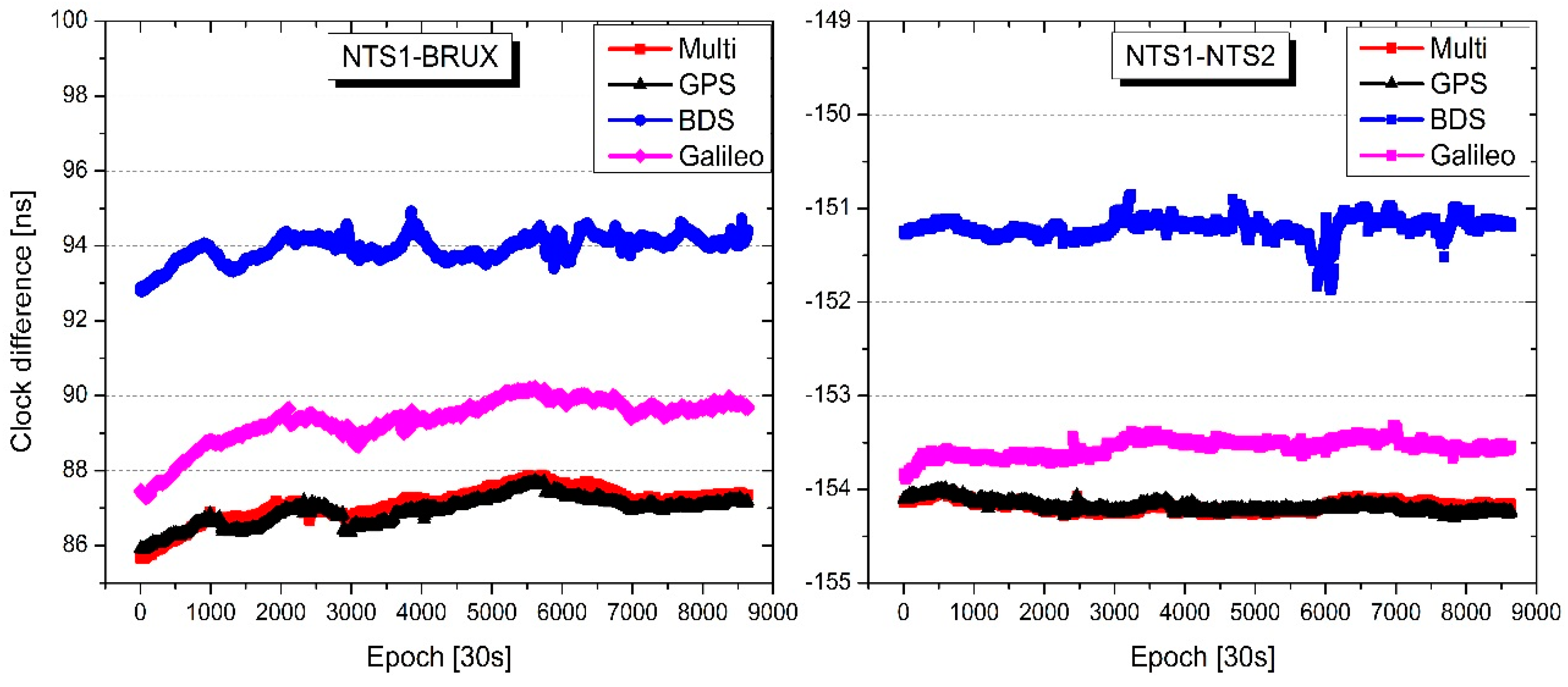
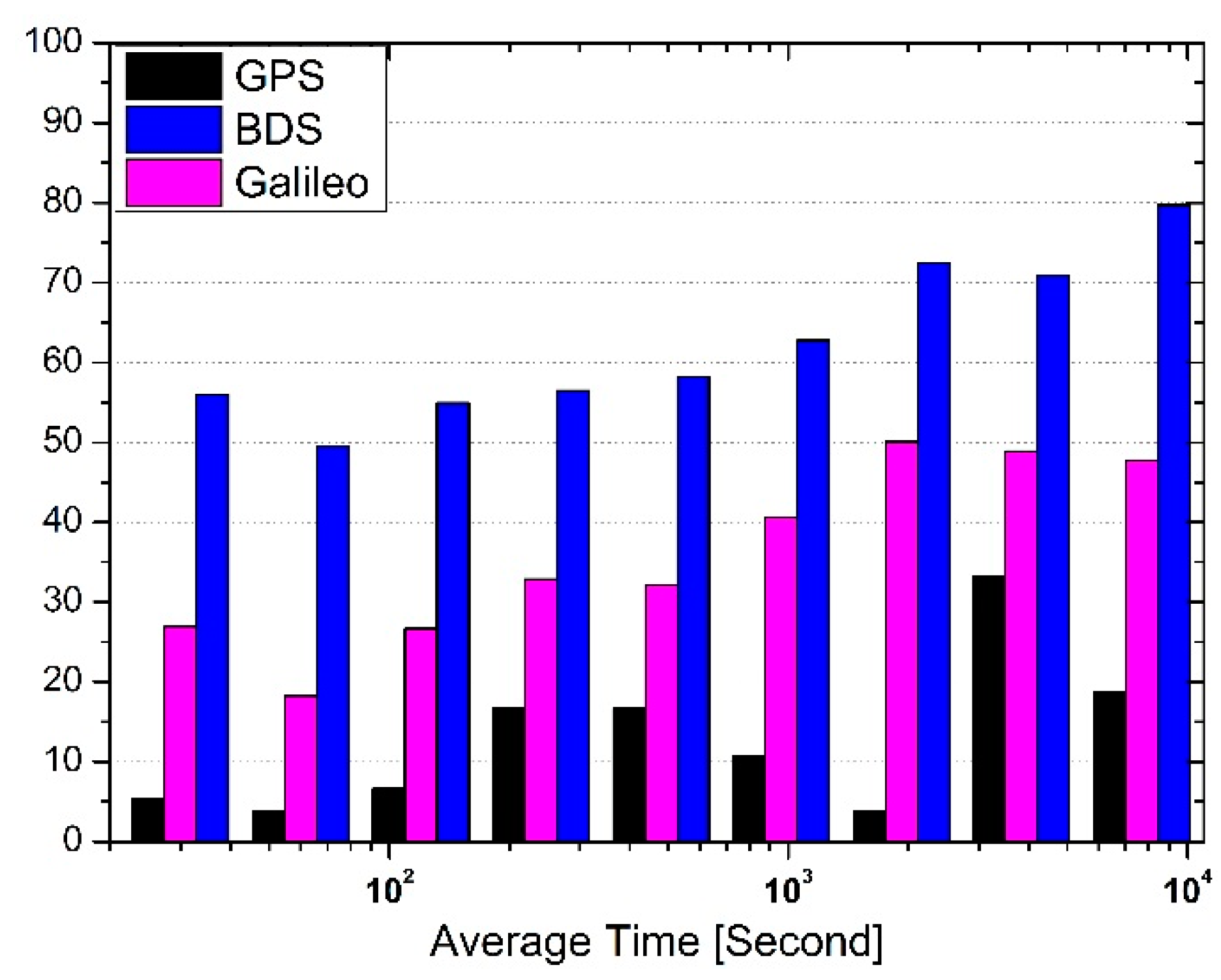
4. Results and Discussion
5. Summary and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Allan, D.W.; Weiss, M. Accurate time and frequency transfer during common-view of a GPS satellite. In Proceedings of the 1980 IEEE Frequency Control Symposium, Philadelphia, PA, USA, 28–30 May 1980; pp. 334–356. [Google Scholar]
- Levandowski, W.; Azoubib, J.; Klepczynski, W.J. GPS: Primary tool for time transfer. Proc. IEEE 1999, 87, 163–172. [Google Scholar] [CrossRef]
- Beutler, G.; Rothacher, M.; Schaer, S.; Springer, T.A.; Kouba, J.; Neilan, R.E. The International GPS Service (IGS): an interdisciplinary service in support of Earth sciences. Adv. Space Res. 1999, 23, 631–635. [Google Scholar] [CrossRef]
- Senior, K.; Koppang, P.; Ray, J. Developing an IGS time scale. IEEE Trans. UFFC 2003, 50, 585–593. [Google Scholar] [CrossRef]
- Petit, G.; Jiang, Z. GPS All in View time transfer for TAI computation. Metrologia 2008, 45, 35–45. [Google Scholar] [CrossRef]
- Jiang, Z.; Petit, G. Combination of TWSTFT and GNSS for accurate UTC time transfer. Metrologia 2009, 46, 305–314. [Google Scholar] [CrossRef]
- Geng, J.; Shi, C. Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously. J. Geod. 2017, 91, 361–374. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut. 2013, 17, 223–236. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- Defraigne, P.; Baire, Q. Combining GPS and GLONASS for time and frequency transfer. Adv. Space Res. 2011, 47, 265–275. [Google Scholar] [CrossRef]
- Jiang, Z.; Lewandowski, W. Use of GLONASS for UTC time transfer. Metrologia 2012, 49, 57–61. [Google Scholar] [CrossRef]
- Harmegnies, A.; Defraigne, P.; Petit, G. Combining GPS and GLONASS in all-in-view for time transfer. Metrologia 2013, 50, 277–287. [Google Scholar] [CrossRef]
- Geng, J.; Zhao, Q.; Shi, C.; Liu, J. A review on the inter-frequency biases of GLONASS carrier-phase data. J. Geod. 2017, 91, 329–340. [Google Scholar] [CrossRef]
- CSNO. BeiDou Navigation Satellite System Signal in Space Interface Control Document (Open Service Signal); Version 2.1; China Satellite Navigation Office: Beijing, China, 2016.
- Steigenberger, P.; Hugentobler, U.; Hauschild, A.; Montenbruck, O. Orbit and clock analysis of Compass GEO and IGSO satellites. J. Geod. 2013, 87, 515–525. [Google Scholar] [CrossRef]
- Gu, S.; Lou, Y.; Shi, C.; Liu, J. BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable. J. Geod. 2015, 89, 979–992. [Google Scholar] [CrossRef]
- Changsheng, C.; Yang, G.; Lin, P.; Wujiao, D. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions. Adv. Space Res. 2014, 54, 818–829. [Google Scholar]
- Paziewski, J.; Wielgosz, P. Accounting for Galileo-GPS inter-system biases in precise satellite positioning. J. Geod. 2015, 89, 81–93. [Google Scholar] [CrossRef]
- Hlaváč, R.; Lösch, M.; Luongo, F.; HAHN, J. Timing Infrastructure for Galileo System. In Proceedings of the 20th European Frequency and Time Forum, Braunschweig, Germany, 27–30 March 2006; pp. 391–398. [Google Scholar]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Han, C.; Yang, Y.; Cai, Z. BDS navigation satellite system and its timescales. Metrologia 2011, 48, S213–S218. [Google Scholar] [CrossRef]
- Caissy, M.; Agrotis, L.; Weber, G.; Hernandez-Pajares, M.; Hugentobler, U. Innovation: The International GNSS Real-Time Service. GPS World 2012, 23, 52–58. [Google Scholar]
- Tegedor, J.; Øvstedal, O.; Vigen, E. Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. J. Geod. Sci. 2014, 4, 2081–9943. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q. Quality variation of GPS satellite clocks on-orbit using IGS clock products. Adv. Space Res. 2013, 51, 978–987. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q. Real-time clock offset prediction with an improved model. GPS Solut. 2014, 18, 95–104. [Google Scholar] [CrossRef]
- Wang, Y.P.; Lu, Z.P.; Qu, Y.; Li, L.; Wang, N. Improving prediction performance of GPS satellite clock bias based on wavelet neural network. GPS Solut. 2016, 21, 1–12. [Google Scholar] [CrossRef]
- Xu, B.; Wang, Y.; Yang, X. Navigation Satellite Clock Error Prediction Based on Functional Network. Neural Process. Lett. 2013, 38, 305–320. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Product. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)–Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Gioia, C.; Borio, D.; Angrisano, A.; Gaglione, S.; Fortuny-Guasch, J. A Galileo IOV assessment: measurement and position domain. GPS Solut. 2015, 19, 187–199. [Google Scholar] [CrossRef] [Green Version]
- Uhlemann, M.; Gendt, G.; Ramatschi, M.; Deng, Z. GFZ Global Multi-GNSS Network and Data Processing Results. In IAG 150 Years. International Association of Geodesy Symposia; Rizos, C., Willis, P., Eds.; Springer: Cham, Switzerland, 2015; Volume 143, pp. 673–679. [Google Scholar]
- Zhao, Q.; Wang, G.; Liu, Z.; Hu, Z.; Dai, Z.; Liu, J. Analysis of BeiDou satellite measurements with code multipath and geometry-free ionospheric-free combinations. Sensors 2016, 16, 123. [Google Scholar] [CrossRef] [PubMed]
- Najibi, N.; Jin, S. Physical reflectivity and polarization characteristics for snow and ice-covered surfaces interacting with GPS signals. Remote Sens. 2013, 5, 4006–4030. [Google Scholar] [CrossRef]
- Geng, J.; Shi, C.; Ge, M.; Dodson, A.H.; Lou, Y.; Zhao, Q.; Liu, J. Improving the estimation of fractional-cycle biases for ambiguity resolution in precise point positioning. J. Geod. 2012, 86, 579–589. [Google Scholar] [CrossRef]
- Hadas, T.; Krypiak-Gregorczyk, A.; Hernández-Pajares, M.; Kaplon, J.; Paziewski, J.; Wielgosz, P.; Garcia-Rigo, A.; Kazmierski, K.; Sosnica, K.; Sierny, J.; et al. Impact and implementation of higher-order ionospheric effects on precise GNSS applications. J. Geophys. Res. Solid Earth 2017, 122, 9420–9436. [Google Scholar] [CrossRef]
- Afifi, A.; El-Rabbany, A. Improved Between-Satellite Single-Difference Precise Point Positioning Model Using Triple GNSS Constellations: GPS, Galileo, and BeiDou. Positioning 2016, 7, 63–74. [Google Scholar] [CrossRef]
- Lu, C.; Li, X.; Zus, F.; Heinkelmann, R.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Improving BeiDou real-time precise point positioning with numerical weather models. J Geod. 2017, 91, 1019–1029. [Google Scholar] [CrossRef]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products. Available online: http://acc.igs.org/UsingIGSProductsVer21.pdf (accessed on 3 February 2018).
- Esteban, H.; Palacio, J.; Javier, G.F.; Feldmann, T.; Bauch, A.; Piester, D. Improved GPS-Based Time Link Calibration Involving ROA and PTB. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2010, 57, 714–720. [Google Scholar] [CrossRef] [PubMed]
- Rovera, G.D.; Torre, J.M.; Sherwood, R.; Abgrall, M.; Courde, C.; Laas-Bourez, M.; Uhrich, P. Link calibration against receiver calibration: an assessment of GPS time transfer uncertainties. Metrologia 2014, 51, 476–490. [Google Scholar] [CrossRef]
- Afifi, A.; El-Rabbany, A. Performance Analysis of Several GPS/Galileo Precise Point Positioning Models. Sensors 2015, 15, 14701–14726. [Google Scholar] [CrossRef] [PubMed]
- Torre, A.D.; Caporali, A. An analysis of inter-system biases for multi-GNSS positioning. GPS Solut. 2015, 19, 297–307. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, B. Retrieval of inter-system biases (ISBs) using a network of multi-GNSS receivers. J. Glob. Position Syst. 2014, 13, 22–29. [Google Scholar]
- Nadarajah, N.; Teunissen, P.J.G.; Raziq, N. Beidou inter-satellite-type bias evaluation and calibration for mixed receiver attitude determination. Sensors 2013, 13, 9435–9463. [Google Scholar] [CrossRef] [PubMed]
- Fridelance, P.; Samain, E.; Veillet, C. T2L2-Time transfer by Laser link: A new optical time transfer generation. Exp. Astron. 1997, 7, 191–207. [Google Scholar] [CrossRef]
- Jiang, Z.; Czubla, A.; Nawrocki, J.; Lewandowski, W.; Arias, E.F. Comparing a GPS time link calibration with an optical fiber self-calibration with 200ps accuracy. Metrologia 2015, 52, 384–391. [Google Scholar] [CrossRef]
- Panfilo, G.; Tavella, P. Atomic clock prediction based on stochastic differential equations. Metrologia 2008, 45, 108–116. [Google Scholar] [CrossRef]
- Lin, P.; Li, X.; Zhang, X.; Li, X.; Lu, C.; Zhao, Q.; Liu, J. Considering Inter-Frequency Clock Bias for BDS Triple-Frequency Precise Point Positioning. Remote Sens. 2017, 9, 734. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X.; Wang, J.; Ren, X. Modeling and assessment of triple-frequency BDS precise point positioning. J. Geod. 2016, 90, 1223–1235. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G. Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut. 2013, 17, 521–533. [Google Scholar] [CrossRef]
- Arnold, D.; Meindl, M.; Beutler, G.; Dach, R.; Schaer, S.; Lutz, Z.; Prange, L.; Sośnica, K.; Mervart, L.; Jäggi, A. CODE’s new solar radiation pressure model for GNSS orbit determination. J. Geod. 2015, 89, 775–791. [Google Scholar] [CrossRef] [Green Version]
- Prange, L.; Orliac, E.; Dach, R.; Arnold, D.; Beutler, G.; Schaer, S.; Jäggi, A. CODE’s five-system orbit and clock solution—The challenges of multi-GNSS data analysis. J. Geod. 2017, 91, 345–360. [Google Scholar] [CrossRef]
- Jiang, N.; Xu, Y.; Xu, T.; Xu, G.; Sun, Z.; Schuh, H. GPS/BDS short-term ISB modeling and prediction. GPS Solut. 2017, 21, 163–175. [Google Scholar] [CrossRef]
- Yao, J.; Skakun, I.; Jiang, Z.; Levine, J. A detailed comparison of two continuous GPS carrier-phase time transfer techniques. Metrologia 2015, 52, 666–676. [Google Scholar] [CrossRef]
- Kazmierski, K.; Sośnica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2018, 22. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site Name | Time Lab. | Frequency Standard | GNSS Receiver | Antenna |
|---|---|---|---|---|
| NTS1 | NTSC | UTC (NTSC) | SEPT POLARX4TR | SEPCHOKE_MC |
| NTS2 | NTSC | UTC (NTSC) | SEPT POLARX4TR | SEPCHOKE_MC |
| BRUX | ORB | UTC (ORB) | SEPT POLARX4TR | JAVRINGANT_DM |
| Items | Models and Strategies |
|---|---|
| Observations | Undifferenced carrier phase and code observation |
| Signal selection | GPS:L1/L2; BeiDou: B1/B2; Galileo: E1/E5a |
| Satellite orbit and clock | Using the precise satellite products from CODE |
| Satellite antenna phase center | Corrected using MGEX value |
| Ionosphere | Eliminated by ionosphere-free combination |
| Tropospheric delay | Initial model + random-walk process |
| Elevation cutoff | 7° |
| Sampling rate | 30 s |
| Observation weight | Elevation dependent weight |
| Estimator | LSQ in sequential mode |
| Receiver clock offset | Estimated with white noise |
| ISB | Estimated with epoch-wise variable method |
| Phase wind-up effect | Model corrected |
| Time link | Multi | GPS | BDS | Galileo |
|---|---|---|---|---|
| NTS1-BRUX | 0.013 | 0.016 | 0.032 | 0.020 |
| NTS1-NTS2 | 0.006 | 0.007 | 0.013 | 0.010 |
| Item | Multi | GPS | BDS | Galileo |
|---|---|---|---|---|
| STD | 0.055 | 0.059 | 0.116 | 0.089 |
| Mean | 154.177 | 154.184 | 151.201 | 153.555 |
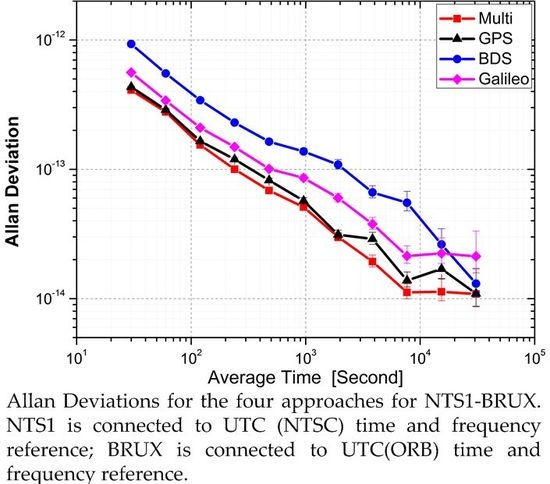
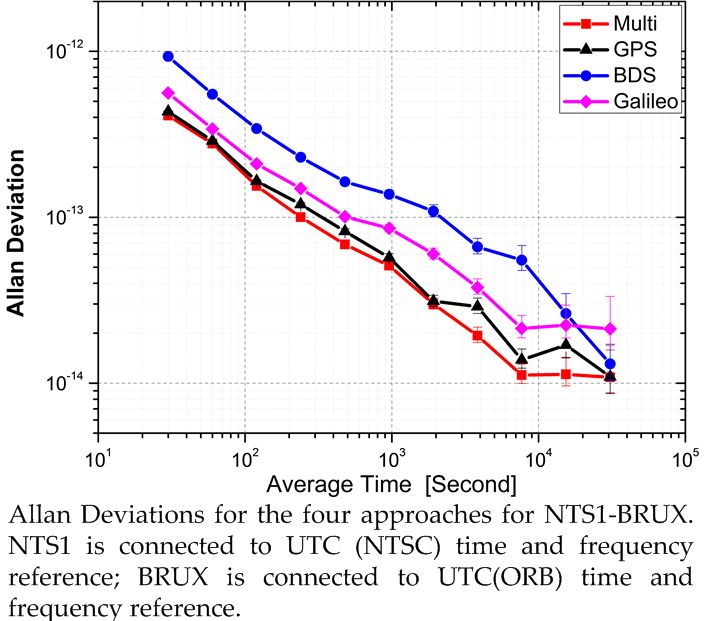
| Tau | Multi | GPS | BDS | Galileo |
|---|---|---|---|---|
| 30 | 4.10 × 10−13 | 4.33 × 10−13 | 9.31 × 10−13 | 5.61 × 10−13 |
| 60 | 2.78 × 10−13 | 2.89 × 10−13 | 5.51 × 10−13 | 3.40 × 10−13 |
| 120 | 1.54 × 10−13 | 1.65 × 10−13 | 3.42 × 10−13 | 2.10 × 10−13 |
| 240 | 1.00 × 10−13 | 1.20 × 10−13 | 2.30 × 10−13 | 1.49 × 10−13 |
| 480 | 6.86 × 10−14 | 8.23 × 10−14 | 1.64 × 10−13 | 1.01 × 10−13 |
| 960 | 5.10 × 10−14 | 5.71 × 10−14 | 1.37 × 10−13 | 8.58 × 10−14 |
| 1920 | 3.00 × 10−14 | 3.12 × 10−14 | 1.09 × 10−13 | 6.01 × 10−14 |
| 3840 | 1.93 × 10−14 | 2.89 × 10−14 | 6.63 × 10−14 | 3.78 × 10−14 |
| 7680 | 1.12 × 10−14 | 1.38 × 10−14 | 5.52 × 10−14 | 2.14 × 10−14 |
| 15,360 | 1.13 × 10−14 | 1.70 × 10−14 | 2.62 × 10−14 | 2.24 × 10−14 |
| 30,720 | 1.09 × 10−14 | 1.09 × 10−14 | 1.31 × 10−14 | 2.13 × 10−14 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Tu, R.; Zhang, R.; Gao, Y.; Cai, H. Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sens. 2018, 10, 324. https://doi.org/10.3390/rs10020324
Zhang P, Tu R, Zhang R, Gao Y, Cai H. Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sensing. 2018; 10(2):324. https://doi.org/10.3390/rs10020324
Chicago/Turabian StyleZhang, Pengfei, Rui Tu, Rui Zhang, Yuping Gao, and Hongbin Cai. 2018. "Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations" Remote Sensing 10, no. 2: 324. https://doi.org/10.3390/rs10020324
APA StyleZhang, P., Tu, R., Zhang, R., Gao, Y., & Cai, H. (2018). Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sensing, 10(2), 324. https://doi.org/10.3390/rs10020324