1. Introduction
Mountainous areas are recurrently affected by active instability processes, such as debris flows or landslides that can induce damages and casualties. To reduce the risks, a careful assessment and monitoring of slope deformations is required. Over the past two decades, capabilities of synthetic aperture radar interferometry (InSAR) have been demonstrated to detect and quantify land surface deformations with a precision in the order of millimeters [
1]. However, some limitations and challenges hinder InSAR techniques to extract surface displacements successfully. Spatio-temporal decorrelation [
2] (due to long perpendicular and temporal baselines between SAR acquisitions) and atmospheric delay [
3] are two main limiting factors. Permanent Scatterer Interferometry (PSI) [
4], Stanford Method for Persistent Scatterers (StaMPS) [
5], Spatio-temporal Unwrapping Network (STUN) [
6], Small Baseline Subsets (SBAS) [
7], and Enhanced Small BAseline Subset (ESBAS) [
8] have been proposed to overcome or mitigate those limitations in specific conditions.
Generally, the use of InSAR techniques in natural terrains encounters more challenges than in urban areas. Low coherence (e.g., vegetated areas) and non-steady deformation processes (e.g., complex landslide type [
9]) are two main problems to retrieve accurate phase deformation using InSAR. Spatio-temporal decorrelation problems could be mitigated by employing small temporal and perpendicular baseline data set [
7] and non-linearity of movements can be taken into account by applying some filter-based approaches [
5]. For enabling InSAR to retrieve phase information in areas where the number of dominant scatterers is limited, several Distributed Scatterer (DS) algorithms have been developed in DS interferometry. SqueeSAR [
10], SBAS, CRLB [
11], CAESAR [
12], virtual [
13] and sequential estimator [
14] are the most frequently used algorithms for DS interferometry.
One of the significant limitations of the InSAR-based technique is that the extraction of displacement components is only limited to the LOS direction. Long-track Deformation Extraction Methods (ADEM) are widely used to take into account the azimuth movement caused by earthquakes [
15], landslides [
16] and glaciers [
17]. ADEM are classified into two main categories: (i) Split-bandwidth-based methods including Spectral Diversity (SD) and Multi-Aperture Interferometry (MAI); and (ii) offset tracking--based methods. Spectral diversity was first proposed to retrieve absolute phase [
18] and then to co-register SAR pairs in the range and azimuth directions [
19].
MAI technique, considered as a version of SD in azimuth, operates on the split-beam of InSAR using band pass filters into the forward- and backward-looking interferograms. It was developed for long-track deformation retrieval [
20]. Since the forward- and backward-looking interferograms are geometrically symmetric, the range and troposphere components will nearly appear the same. As a result, the tropospheric phase contribution can be removed from the interferograms. In addition, phase distortions from the earth-flat and topographic effects resulting from MAI can be successfully removed [
21].
Offset tracking-based methods (in the InSAR domain) are generally classified into (i) Coherent Cross Correlation (CCC), known as coherent speckle tracking; and (ii) Incoherent Cross Correlation (ICC), known as feature or pixel tracking. CCC relies on using the complex image patches and can be applied to coherent data even without any tangible and traceable scatterer. It uses cross-correlation operation as an optimum (maximum-likelihood) estimator (MLE) for offset determination of partially correlated circular Gaussian signals and some systematic (non-noise) phase differences such as topographic and flat-earth fringes [
22]. CCC operates on the formation of small interferograms involving some changes in range and azimuth, the offsets is specified by detecting the peak average coherence [
23]. Contrary to CCC, ICC only relies on amplitude information of image patches and attempts to find offset between traceable features (e.g., lines and rocks). It uses cross-correlation of intensity of SLC data and finds the peak location to estimate offset. If mean coherence values are high, ICC (using complex cross-correlation) is preferred, whereas CCC should be preferred if the data has low mean coherence values (using intensity cross-correlation).
Template matching algorithms are widely used for image registration and feature matching. Generally, template matching algorithms can be classified into three groups [
24]: (i) featured-based algorithms that are well suited to extract the features using their spatial relations or descriptors; (ii) patch or area-based algorithms that consider the intensity of the pixel values obtained after cross-correlation-based similarity; and (iii) optical-flow or motion tracking algorithms. The first group is mainly appropriate to match structural information (i.e., features), the second one fits for intensity information and the third one is based on the relation between photometric correspondence vectors and spatiotemporal derivatives of luminance in an image sequence [
25].
Feature matching enables finding correspondences between two images based on the local interest points. It plays a key role in computer vision applications such as motion estimation, image registration, object detection and tracking. Feature-based matching procedures rely on local feature detection (mainly based on gradient or intensity variation) and corresponding feature descriptors (local image gradient). The local features are usually blobs, corners or edge pixels that are extracted by an appropriate feature detection algorithm. Efficiently matching features across images is the core of feature-based algorithms in computer vison. Repeatability, distinctiveness and localization of features are the three main characteristics of a good local feature under varying imaging condition and in the presence of noise [
26]. Localization refers to how well a detector can locate the exact position of features. Binary Robust Invariant Scalable Keypoints (BRISK) [
27], Minimum eigenvalue algorithm (MEIGEN) [
28], Harris [
29], Features from Accelerated Segment Test (FAST) [
30] and Fast Retina Keypoint (FREAK) are often used as corner-based feature detection functions and descriptors. Speeded Up Robust Features (SUR) [
31] and Scale Invariant Feature Transform (SIFT) [
32] are the most significant blob-based features descriptors in computer vision field. The descriptors of the corner-based features are mainly based on pairs of local intensity differences (e.g., BRISK) while the descriptors of the blob-based features (e.g., SURF and SIFT) are based on local gradient. The use of computer vision-based algorithms has not been widely investigated with SAR data except for the task of image registration [
33,
34].
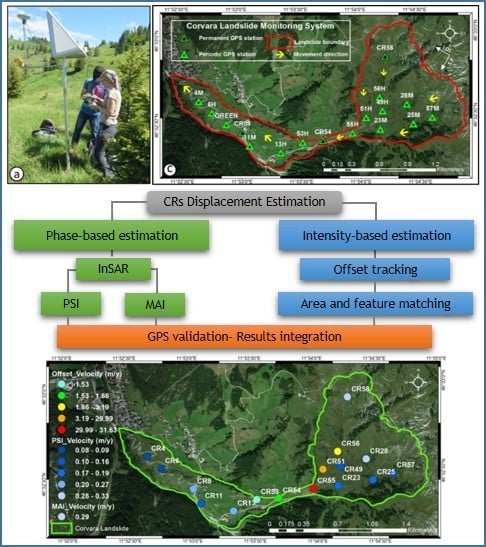
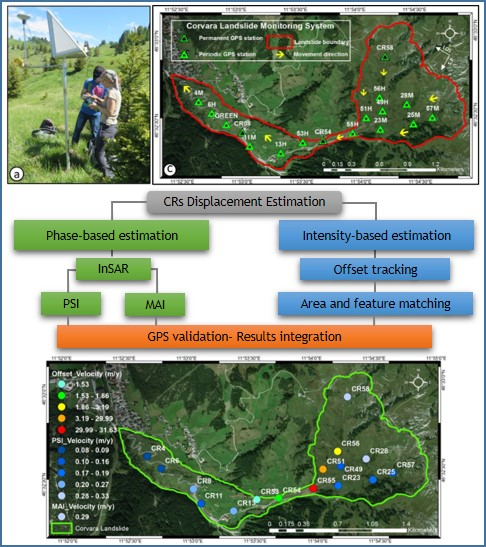
This research aims to improve the accuracy of offset estimation using computer vision techniques, and integrate the PSI, MAI, and offset tracking results to monitor a complex and vegetated landslide through X-band CRs. This allows us to overcome or mitigate the limitations of some methods. PSI is limited only to 1D LOS displacement detection and an upper limit for velocity estimation. Non-LOS displacements are not also retrievable by PSI, in such case; MAI could be considered as an alternative technique to overcome this limitation. High movement rate leads to phase aliasing in the CCC-based methods and dependency of offset estimation accuracy on data pixel size and changes in the features (e.g., geometrical distortions) are the main constraints of the ICC-based methods. Low coherence problem in vegetated areas, leading to phase unwrapping difficulty, can be tackled by using artificial CR.
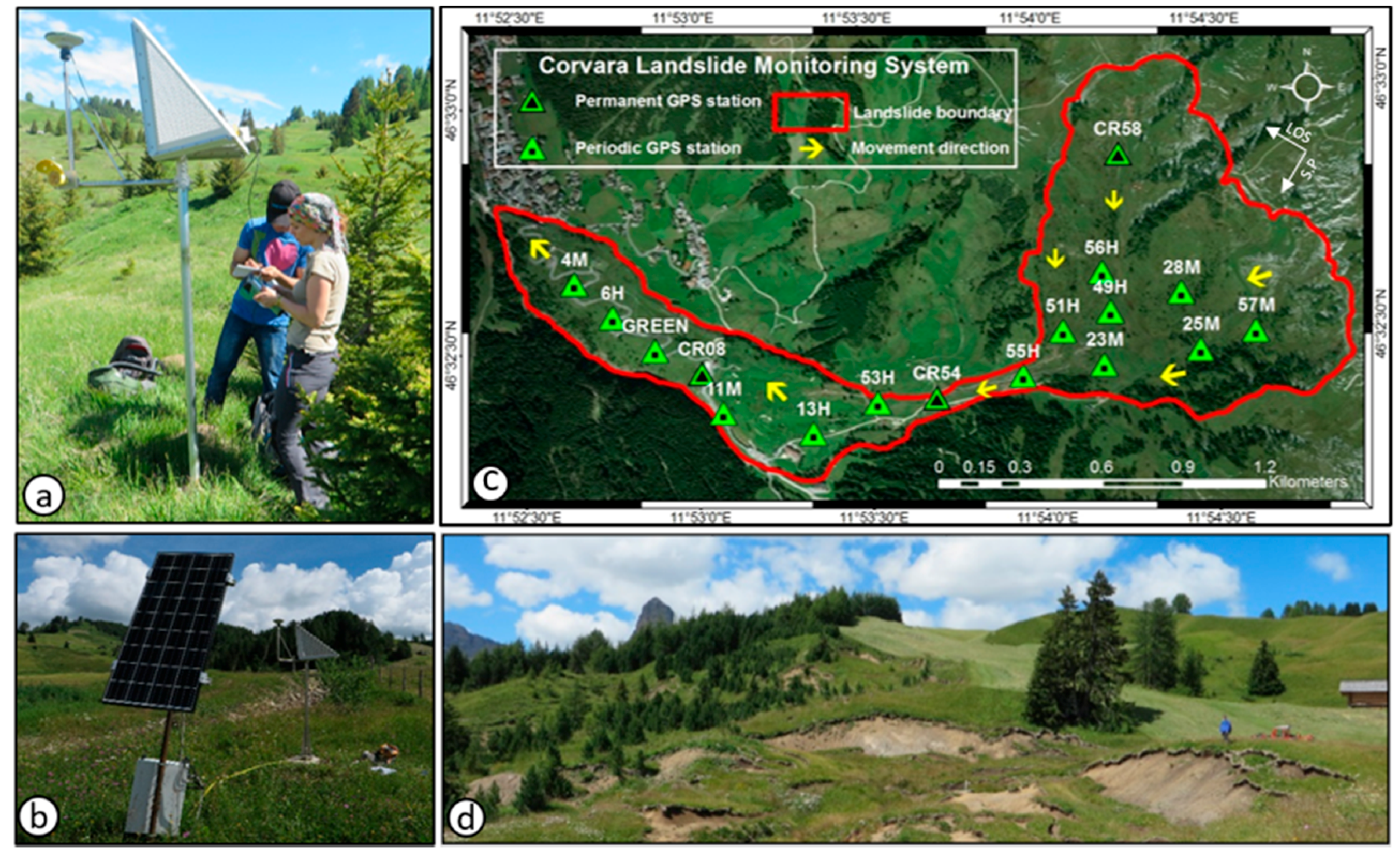
The paper initiates with a brief presentation of the test site, the equipment installed and the datasets, as well as some metrics for quality assessment. The method section illustrates the techniques used in the study and some data processing tasks. The results of InSAR and offset tracking techniques applied to the CRs are presented in the following section. Finally, the performance assessment results, downsides and advantages of each technique are addressed in the discussion and conclusion sections.
3. Methods
To estimate the CRs displacements several considerations must be considered in the InSAR processing. To have a reliable phase unwrapping, the unmolded phase such as atmospheric contribution must be smaller than 0.6 rad, meaning that PS pixels density must be more than 3–4 per km
2, for common atmospheric conditions [
41]. To take into account this PS range constraint, especially for vegetated landslides, artificial corner reflectors can be used as PSs to fill the gap between the PSs network. In addition to the above-mentioned limitations, the deformation phase cannot be retrieved unambiguously when the displacement phase between two successive acquisitions goes beyond ±
π [
42], which refers to the Maximum Detectable LOS Displacement (MDLD) (Equation (1)). The MDLD of each adjacent pixel in a wrapped interferogram and during the phase unwrapping cannot exceed
λ/2 and
λ/4 (less than 0.5 interferometric fringes per pixel), respectively (Equation (2)) [
43,
44]. Therefore, the maximum range of displacement rate can be theoretically defined either in terms of wavelength-revisit time or in terms of wavelength-pixel size of SAR data:
where Δ
T,
λ and
r indicate the time interval of two successive acquisitions, the sensor wavelength and the pixel size of the SAR image, respectively. Based on Equation (1), the theoretical MDLD rates for TerraSAR-x with revisit time of 11 days, COSMO-SkyMed with the nominal repeat cycle of 16 days and Sentinel-1A/B with revisit of 6 days are 25.7 cm/year, 17.6 cm/year and 85.2 cm/year, respectively. According to Equation (2), the MDLD for TerraSAR-X (pixel size: 1 m × 1 m with 1 look), COSMO-SkyMed (pixel size: 2 m × 2 m with 1 look) and Sentinel-1A/B (pixel size 13 m × 13 m with 1 × 4 looks) will be 1.55 × 10
−2, 7.75 × 10
−3 and 2.1 × 10
−3, respectively. The MDLD upper limit does not consider the noise caused by the various decorrelation sources.
3.1. Data Pre-Processing
Before starting data processing, we first performed a quality assessment analysis on the CR footprints. In fact, knowing the quality and evolution of the CR signals over the time span is useful to interpret InSAR results. Then, we prepared the data for offset tracking processing.
3.1.1. CR Response Quality Assessment
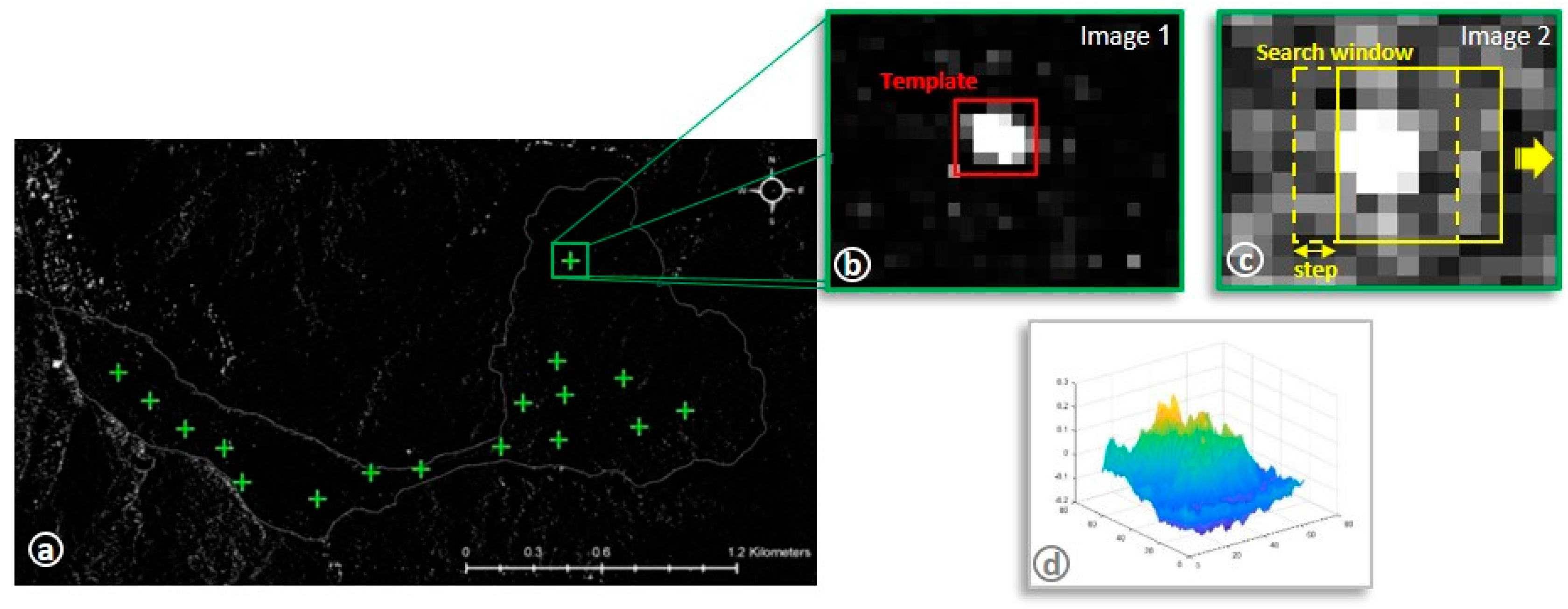
When a SAR system response to a CR is reliable and stable (intensity and phase) in the time series, the CR orientation (i.e., azimuth and elevation angles) has been properly aligned toward the satellite. The Impulse Response Function (IRF) characteristic of a received signal is a significant indicator for data quality check. If a CR has been installed optimally, the footprint of a CR on a SAR image should show a cross-like shape and its IRF should be similar to an ideal IRF (i.e., a Sinc function, see
Figure 2d). Several parameters can determine the quality of the SAR response to a CR including: (i) the Peak Side Lobe Ratio (PSLR) refers to the ratio between the peak elevation of the side lobe (I
s) and the peak elevation of the main lobe (I
m); and (ii) the Integrated Side Lobe Ratio (ISLR) indicates the ratio between the power in the main lobe and the total power in all the side lobes. In
Figure 2d, the area below the 3 dB intensity points in the main lobe specifies Spatial Resolution (SR) of SAR data.
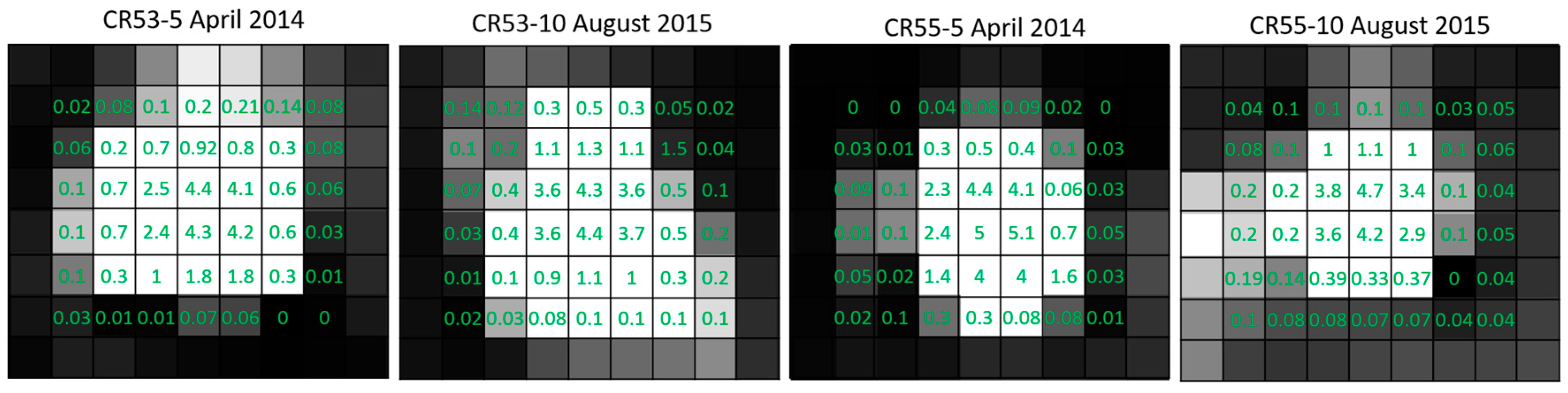
Table 2 lists the PSLR in range and azimuth (i.e., RPLSR and APSLR) and the ISLR for each CR extracted. As an example, we show the IRF and intensity value of CR13 providing the highest backscattering signal (see
Figure 2a–c). This quality check procedure helps in understanding whether the CRs have been tilted by the landslide movement or not. If so, the CR orientation changes could considerably influence InSAR and offset tracking results.
3.1.2. Data Pre-Processing
The data pre-processing was performed in two steps to use the intensity information of CSK data for offset tracking processing. First, the data were calibrated into the sigma naught (i.e., backscatter coefficients) and then georeferenced in the UTM coordinate system. To reduce the speckle, the Anisotropic Non-Linear Diffusion (ANLD) filter was applied to both images considering Gaussian blur kernel variance equal to 0.5, anisotropy equal to 5, and step size equal to 100. Attention was paid to avoid truncating high intensity values of the image pixels to a fixed value in the calibration step. Pixels with a high sigma naught are truncated to 5 in SARscape software [
45]. If that happens, the CR footprints will have several pixels with identical values (i.e., 5) that affect offset estimation at the sub-pixel level.
3.2. Methodology
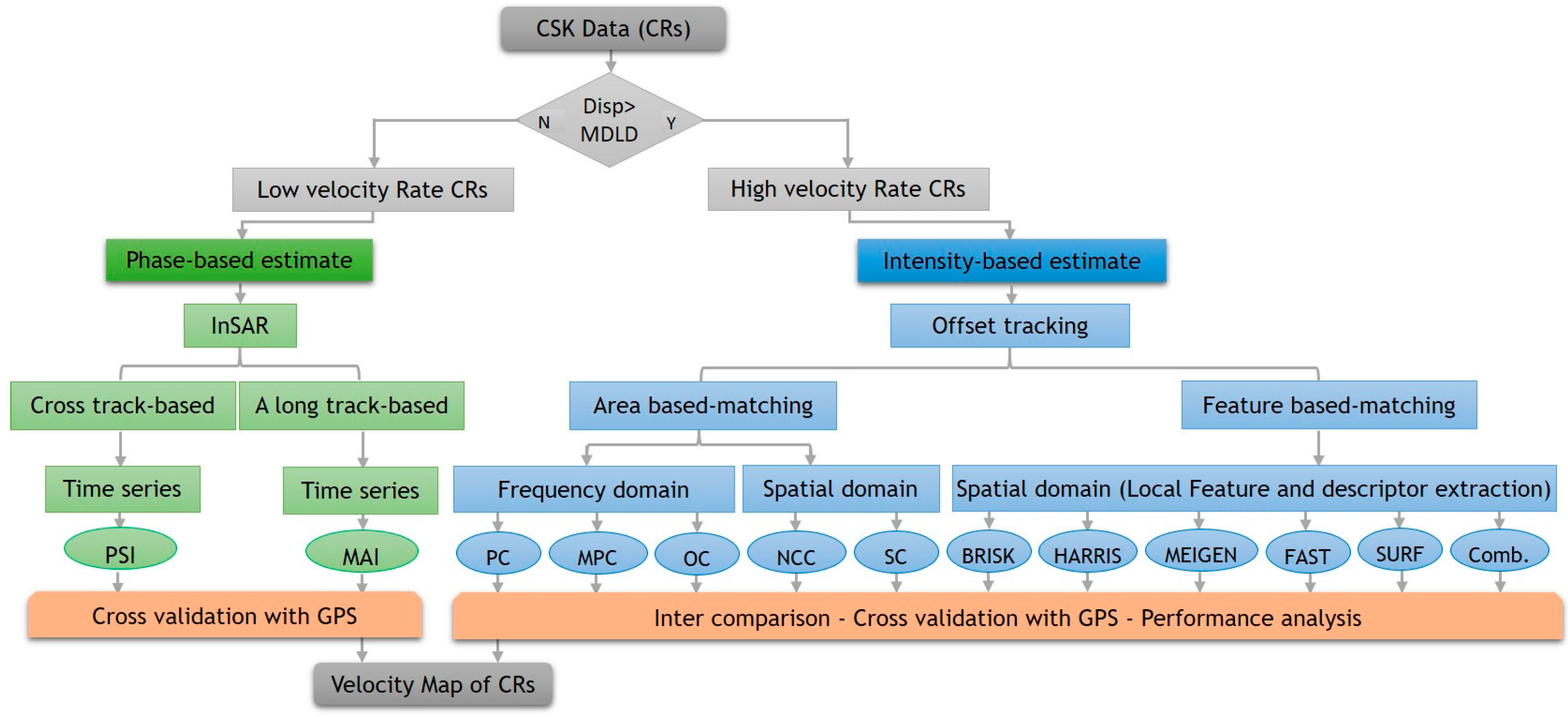
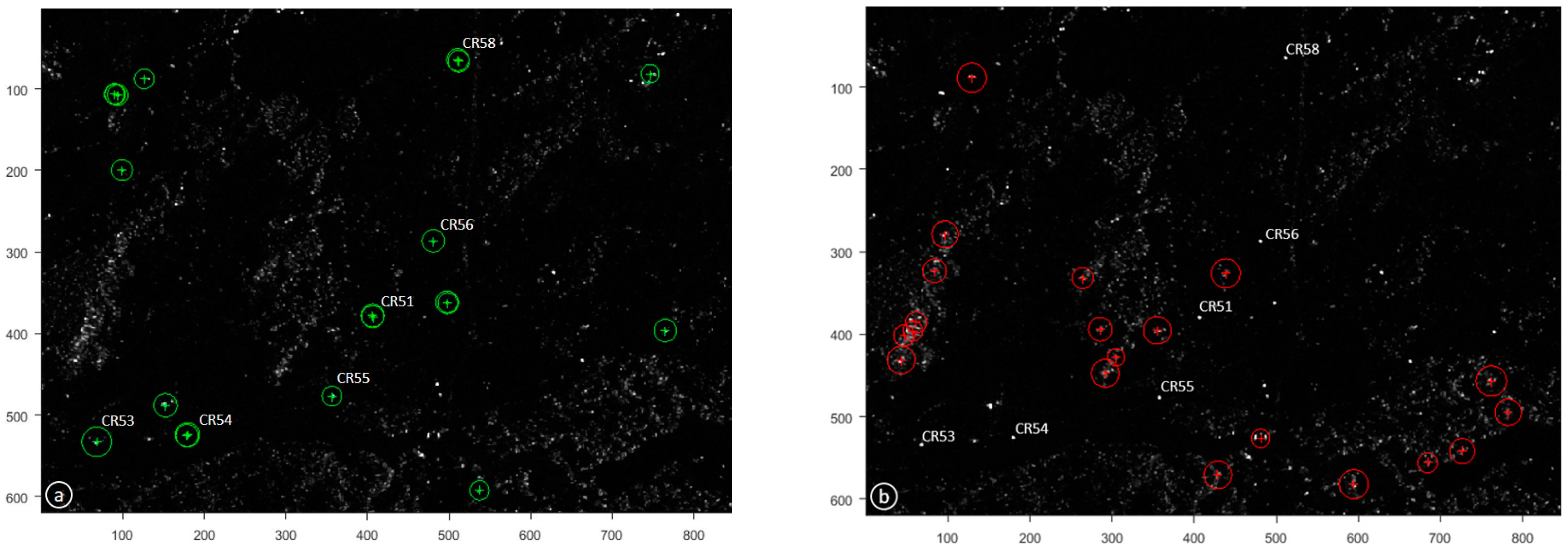
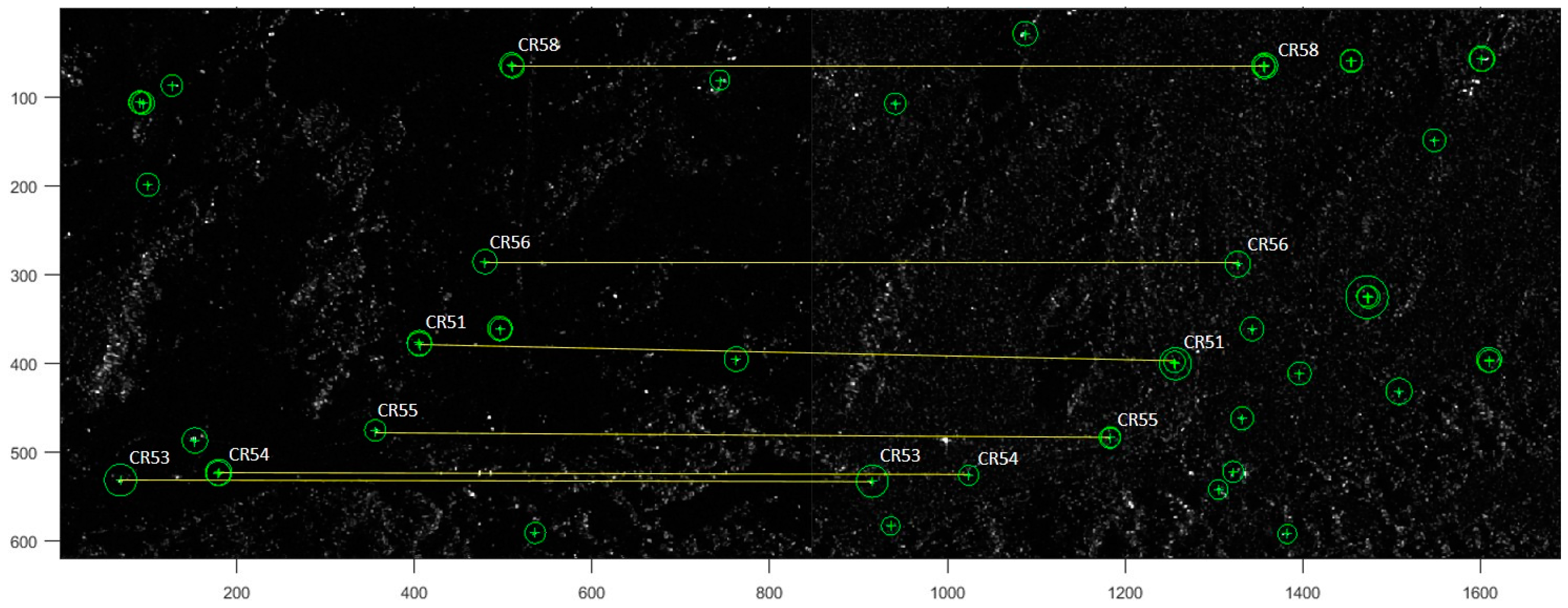
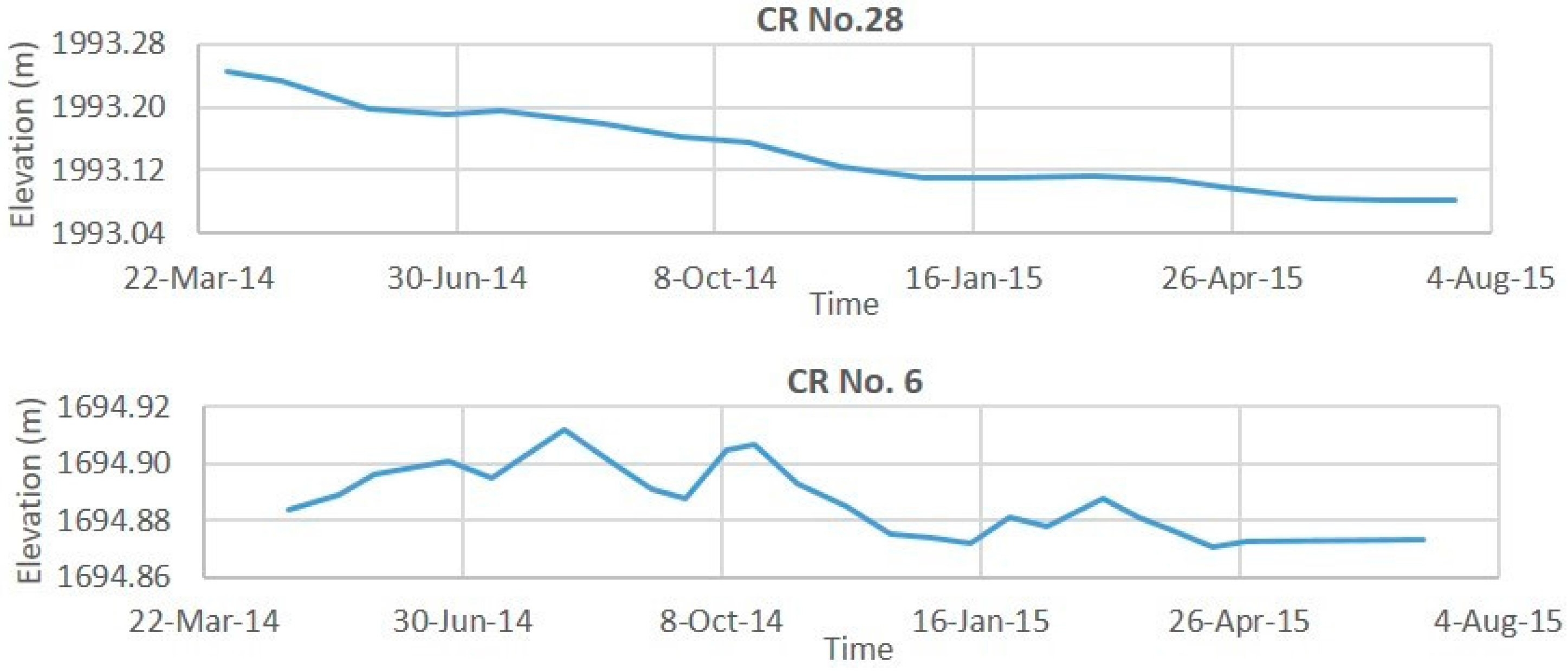
In this paper, the low velocity rate CRs corresponding to displacements in the MDLD range were processed using the PSI and MAI (only CR58) techniques over the time series. The high velocity rate CRs having displacements beyond the MDLD range were processed by offset tracking-based techniques. To investigate the performance of different offset tracking techniques several matching algorithms (i.e., area and feature-based matching methods) were applied to one CSK pair according to the first and last acquisition dates. This aims to estimate the CRs offsets between these two SAR images.
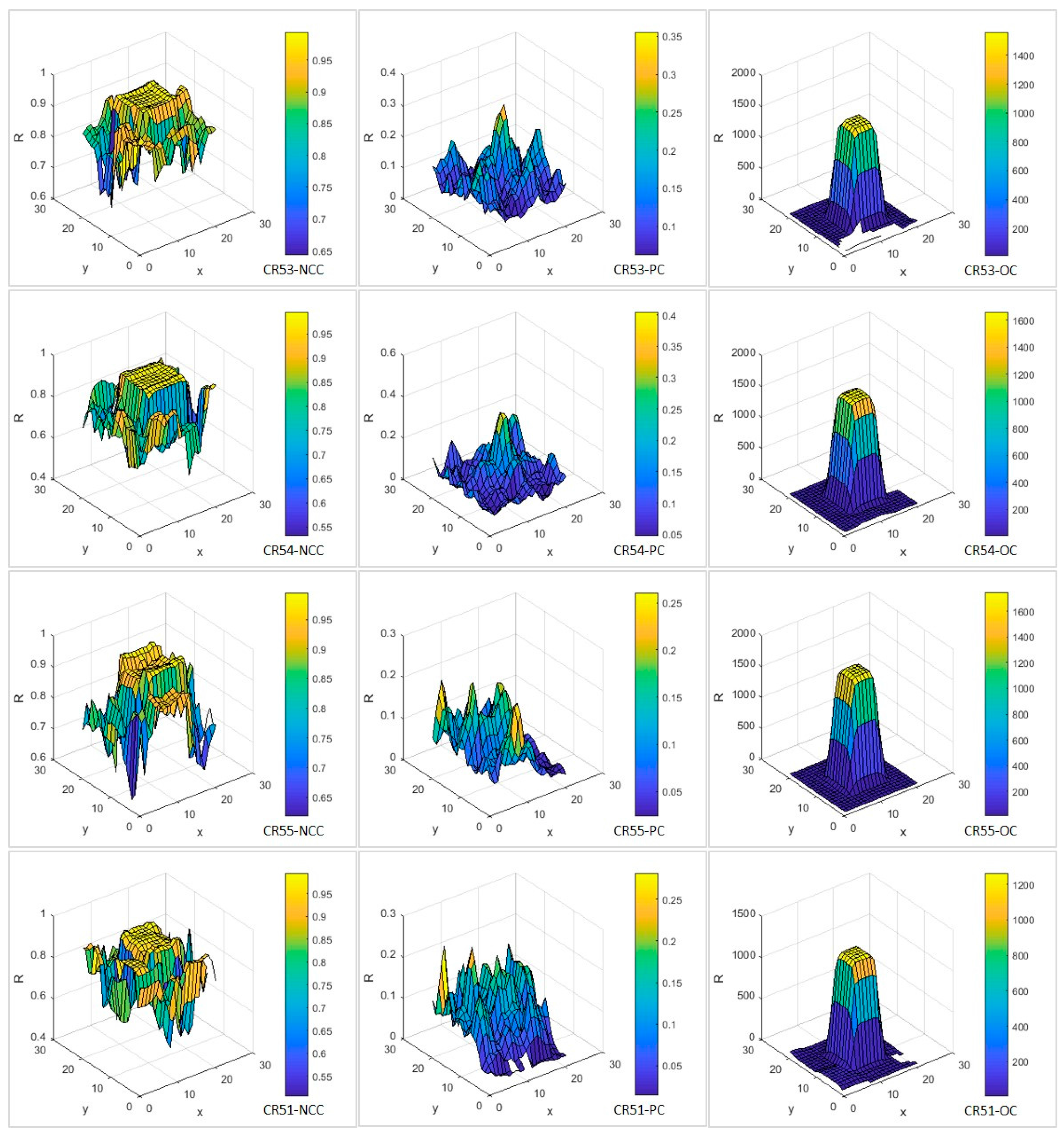
The area-based matching algorithms investigated in this study are (1) the Phase Correlation (PC); (2) the Modified PC (MPC) implemented by ImGRAFT [
46] and COSI-Corr [
47,
48], respectively; (3) the Orientation Correlation (OC) implemented by ImGRAFT and CIAS [
49,
50], concurrently; and (4) the NCC and Statistical Correlation (SC) implemented by CIAS and COSI-Corr. In addition, the feature-based matching algorithms taken from computer vision are as follows: (1) BRISK (FREAK as descriptor); (2) HARRIS; (3) MEIGEN; (4) FAST; (5) SURF; (6) the combination of BRISK, HARRIS and MEIGEN detectors with SURF as a descriptor. All feature-based matching algorithms were implemented in MATLAB [
51]. Although OC is practically a feature-based algorithm, we put it in the area-based matching category, because it uses a correlation operator for matching and a moving window-based approach. The methodology flowchart is divided into two branches according to the landslide velocity rate and the related methods for estimating it (
Figure 3).
The principle of template matching-based methods of area-based algorithms relies on a predefined template with a given window size that is moved within the search window area to find the highest similarity to match a feature. The template matching-based estimator principle is illustrated in
Figure 4. In the following, the theory behind each method that used in this manuscript and some implementation details related to the data processing are briefly described.
3.3. InSAR Techniques (Phase-Based Estimation)
3.3.1. Permanent Scatterers Interferometry (PSI)
To overcome the decorrelation problem due to the vegetation observed on the Corvara landslide, the PSI technique has been applied to the installed CRs. The main goal of PSI processing is the extraction of the phase displacement component without any other residual phase components especially the noise.
Figure 5 shows the SAR data pairs combination and connection graph with 27 CSK images as well as the rainfall data taken from the Piz la Ila station.
The master image is selected based on the highest stack coherence (
γm) according to the following equation [
42] adopted for the CSK to maximizes the sum correlation of all the interferograms:
where
with
as perpendicular baseline between images
m and
k at the center of images,
temporal baseline (in years), and
Doppler baseline. Since the time span of the dataset is nearly less than one and a half years, we consider 1.5 years as an upper limit for the temporal baseline. The master and slaves chosen according to Equation (3). The minimum and maximum perpendicular baselines are of 42 m and 976 m, respectively to the master image, which are smaller than the critical baseline.
The PSI processing [
4] was run with the SARscape software following five steps: (1) single master connection network creation; (2) images co-registration, interferogram generation and flattening; (3) first inversion; (4) second inversion and (5) displacement geocoding. First, all slaves are co-registered to the master image with an oversampling factor of 4 in range to avoid aliasing. None of Doppler separation of each slave and master was beyond the critical
, hence, no Doppler filtering was applied. Since the perpendicular baselines of all pairs are much lower than the critical baseline (45% of the critical baseline), the spatial decorrelation is very limited. No spectral filtering is applied in order to keep the data at the highest resolution possible and increasing pixel probability to be dominated by one scatterer [
5]. Initial PS pixels selection was performed by using the ratio of the standard deviation to its intensity average, known as the amplitude dispersion index (
DA). In the first inversion step, the residual height and displacement velocity were obtained by considering the reliability of phase history of selected PS pixels using the linear model. The phase offset retrieved from the interferograms was removed using the highest coherent pixel selected within a predefined area (5 sqkm) as a reference point. The second inversion estimated the atmospheric phase components by using the previous model and the second linear model to fit the final displacement after removing the atmospheric phase. Low and high band pass filtering with window sizes of 1000 and 365 (days) were then applied to remove the spatial and temporal distributions of the atmospheric variations.
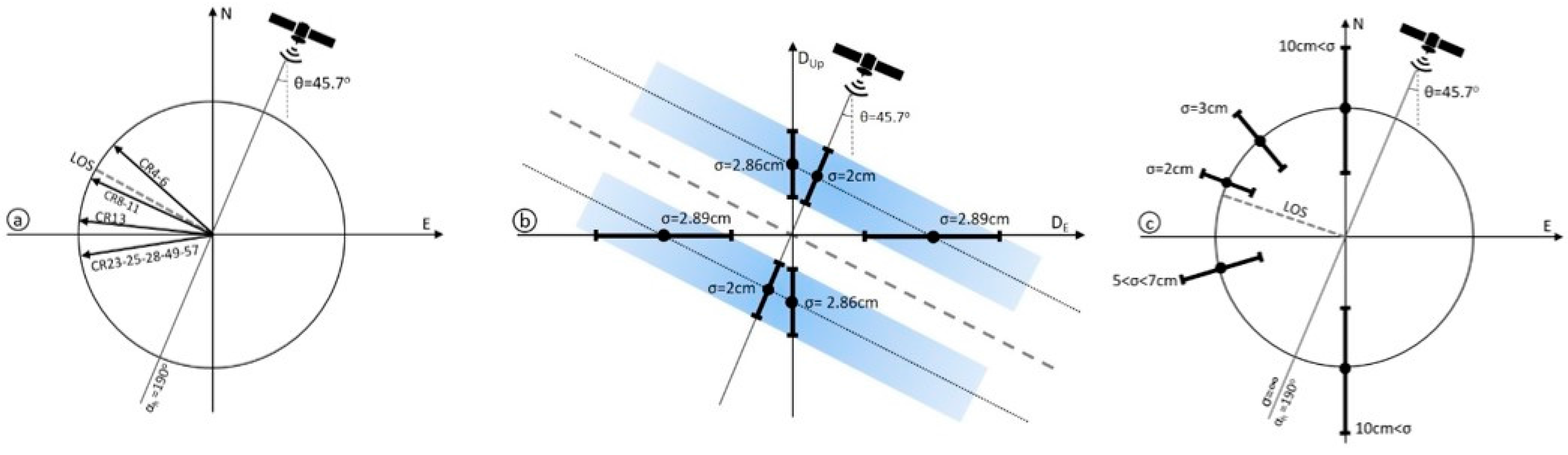
In the validation step, the GPS measurements have been projected into the LOS direction to be compared with PSI results. The sensitivity decomposition can be obtained using unit vector, as a function of range and azimuth changes for LOS (cross-track) [
52] and along-track deformation, as follows:
The sensitivity decomposition of LOS deformation obtained by substituting and in Equation (5), is .
3.3.2. Multi-Aperture Interferometry (MAI)
MAI is an advanced InSAR technique based on the split-beam of InSAR processing using a modification of the Doppler centroid into forward (
) and backward (
) looking interferograms [
20]. The resultant phase difference between two SAR pairs can be used for estimating a long-track displacement. The MAI phase (Equation (7)) and its accuracy (Equation (8)) are defined as:
where
l is the length of the antenna,
n is a normalized squint (fraction of the full aperture width),
and
are the standard deviations of the phase and displacement measurements, respectively [
20,
21]. Since the movement direction of the CR58 is approximately aligned to the azimuthal direction (nearly N–S) with a magnitude of about 34 cm, for reducing the computational load of the data processing, MAI was applied to half of the SAR data over the full time series. Moreover, different multi-looking factors (4 × 4, 16 × 16 and 64 × 64) and
n parameters (i.e., 1/2 and 1/4) were tested.
3.4. Intensity-Based Estimation
3.4.1. Offset Tracking (Area-Based)-Frequency and Spatial Domains
Phase Correlation (PC)
Image matching can be performed in the frequency domain referring to phase correlation. Let
f1(
x,
y) and
f2(
x,
y) be two signals with the corresponding matching window of the first and second images at the time of
t1 and
t2. The offset presented (Δ
x and Δ
y) in the second image (
f2) is defined by
By taking the Fourier, the normalized phase correlation (known as the cross-power spectrum) is as follows:
where
F1 and
F2 are FFT of
f1 and
f2, and * indicates the complex conjugate. Two PC versions were applied to the intensity-based SAR images: (i) the standard PC; and (ii) a modified version of PC (MPC). MPC minimizes the weighted residual matrix between the computed normalized cross-spectrum and the theoretical one to both reach more flexibility on the frequency weighting and to solve the phase wrapping ambiguity. It uses an iterative process (re-computing times of frequency mask adaptively) to increase the robustness and accuracy, and frequency masking to obtain a bias-free correlation [
47]. The robustness iteration and mask threshold parameters are firstly set to 2 and 0.9, respectively. To investigate the role of the robustness iteration parameter in accuracy improvement of the offset estimation, its value is then increased to 4 by a resampling process.
Orientation Correlation (OC)
OC is a template-matching algorithm in the featured-based matching category and relies on orientation of image intensity gradients [
53]. After indexing images using (
x,
y), where
x and
y are integers, two images
and
are matched. The Orientation Intensity Of Gradient (OIOG) of the images
and
are built up according to [
53]:
sgn(
x) and
i indicate the sign function and complex imaginary unit, respectively. The orientation images are then matched using inverse FFT-based correlation. Since OIOG on the images has no gradient (i.e., 0 + 0
i) for uniform regions and is equal to 1, hence, OC is invariant to offset illumination changes [
53].
Normalized Cross Correlation (NCC)
NCC is a robust and simple method to seek for a particular pattern that has probably been shifted in two subsequent (in time) images to find the related offset. In cross-correlation-based offset tracking, a template with the function
(
x,
y) and size of
Nx ×
Ny is moved across an image with the function
and size of
Mx ×
My by
u step in
x-direction and
v step in
y-direction pixel by pixel. All cross-correlation coefficients are stored in the correlation matrix as follows:
where
, and
u,v and
indicate the average value of the search
and
template windows shifting with (
u,
v) steps. Computation of Equation (14), especially for a large image, is intensive and needs a calculation in order of (
Nx ×
Ny ) × (
Mx −
Nx) × (
My −
Ny) [
54]. For instance, the computational load for a NCC calculation with a template and search windows size of 64 × 64 and 128 × 128 pixels, respectively, is more than 10
6 operations. NCC algorithm was applied to one SAR pair using CIAS and COSI-Corr. SC in COSI-Corr uses the statistical approach based on the cross correlation. To evaluate the effect of using different templates and search windows on the accuracy of the offset estimation, several windows were defined based on an initial guess of the CRs displacements (i.e., with 64 × 64, 32 × 32 and 16 × 16 search windows, 16 × 16 and 8 × 8 template windows and according to 2, 4 and 8 pixels during the moving window step). This procedure is used for each area-based estimator.
3.4.2. Offset Tracking (Feature-Based)—Spatial Domain
Generally, the BRISK algorithm includes three main parts: (i) sampling pattern; (ii) orientation compensation; and (iii) sampling pairs [
27]. The features in BRISK are extracted in octave layers and layers in-between of the image pyramid, and then the location and the scale of each feature is acquired in the continuous domain via quadratic function fitting [
27]. The BRISK descriptor uses Hamming distance instead of Euclidean distance to match features utilizing the sum of XOR operation between two binary descriptors [
27]. HARRIS operates on the second moment matrix (auto-correlation matrix) to detect the features using the gradient distribution in a local vicinity of a point-like target [
29]. MEIGEN is a feature detector that extracts the point feature using a measure of feature dissimilarity to quantify the changes between two images [
28]. FAST detector uses comparing of pixels where those have only been located on a circle of fixed radius around the point (i.e., 16 pixels) to consider the object as a corner candidate [
30]. SURF detector considers integral images for image convolutions and Fast-Hessian matrix. The SURF descriptor is based on dividing the neighborhood region of each feature into sub-square regions (i.e., 4 × 4) and then calculating the response of a 2-dimenssions Haar wavelet for each sub-region [
31]. FREAK, as a binary descriptor, was also used by the BRISK detector for describing the detected BRISK-based features. FREAK is a cascade of binary strings computed by efficiently comparing image intensities over a retinal sampling pattern [
55]. To utilize the high capability of SURF in localization, four corner-based detectors (i.e., BRISK, HARRIS, MEIGEN FAST) were combined with the SURF descriptor in the feature matching step. In this way, the improvement potential of the offset estimation accuracy could be investigated and compared with the previous status (i.e., the corner-based algorithms as either detector or descriptor). The set of parameters for the feature detection function were presented in
Table 3.
6. Conclusions
Although the Corvara landslide has been the subject of the previous studies [
36,
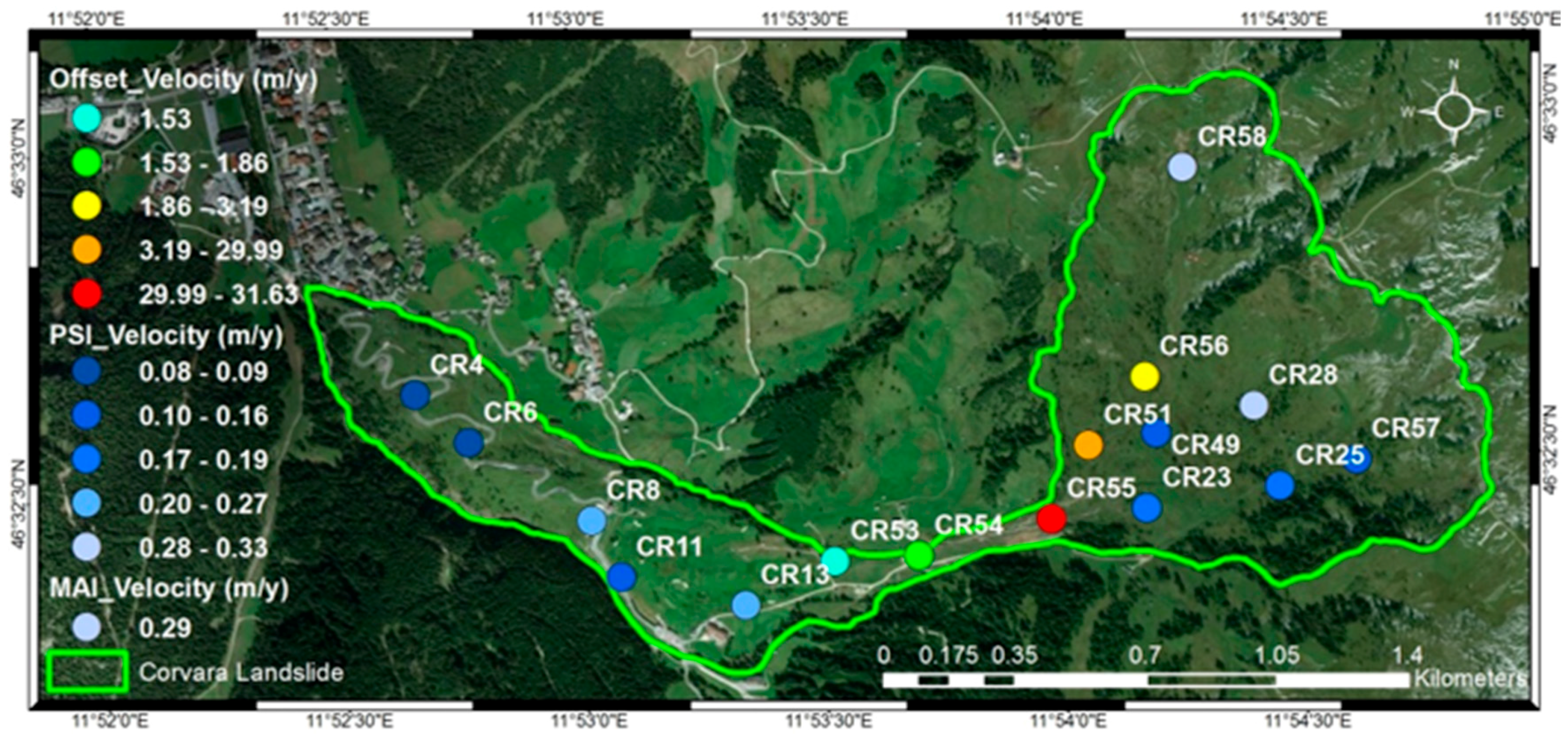
39], they have faced with the intrinsic limitations of the techniques used. For example, PSI was not able to estimate the high velocity rate and non-LOS CRs and the differential DEM (UAV-based photogrammetry) derived from two subsequent acquisitions was only able to detect the vertical deformation limited only to the small part of the landslide (i.e., left-down side of CR58) due to the large extend of the landslide. In this research, these limitations have been overcome by using the integration of PSI, MAI, and offset tracking results, allowing the estimation of the displacements of the CRs over the whole part of the landslide.
The PSI results showed that the proper orientation and quality assessment parameters of CRs (i.e., PSLR; ISLR and IRF) have a key role in the noise error reduction. The provided sensitivity analysis model indicated that the uncertainty of the PSI measurements increases by deviating from the displacements azimuth with respect to the LOS azimuth. When displacement is aligned to the satellite azimuth, the displacement estimation is impossible (infinitive Std). Moreover, non-linearity behavior of the CRs motion in natural terrain could propagate some errors in the final extracted displacements when a pre-defined-based model of the PSI technique is used. In such case, non-predefined model methods should be considered.
The MAI result obtained for CR58 demonstrated that MAI provided the best-offset estimation among other offset-based estimators. This means that if displacement is aligned to N–S direction (nearly satellite path), MAI provides the highest accuracy up to 2.5% of the pixel size of CSK data (i.e., 2 m). This result could even be improved in case of having data with a higher coherence. Low coherence or a high coherent target surrounded by low coherent surface (in our case CR surrounded by vegetation) are the limiting factors to use higher multi-looking factors to increase MAI precision.
The accuracy of the amplitude offset tracking technique have been empirically estimated between about 1/10 to 1/30 of the pixel size for typical SAR systems. This accuracy corresponds to 20 cm and 6.6 cm of the pixel size of CSK data (i.e., 2 m) or 10% and 3.3% of the pixel size. The offset accuracy varied in xy directions, achieving from 0% of the pixel size (i.e., correct estimation) using a combination of the feature-based algorithms (e.g., MEIGEN_S for y offset of CR51) up to 1% of the pixel size using the phase correlation (e.g., PC for x offset of CR51). According to the results, not only the main objective of the paper was fulfilled (i.e., sub-pixel accuracy of offset estimation) but also a higher accuracy was obtained. The results were obtained when the random changes in pixel values occurred by CR tilting between two data acquisitions (i.e., at the worst-case scenario). Meanwhile, area and feature-based algorithms have been mainly developed to take into account the common geometric distortions (e.g., scale, rotation, and translation). Therefore, in normal conditions (with common distortions), the proposed approaches should provide more accurate and reliable results.
In general, the feature-based matching algorithms outperformed the area-based matching ones, which are usually used for offset estimation in the SAR data domain. The modularity of the feature-based algorithms allows us to combine each of corner and blob-based feature detection functions and descriptors. The combination of different algorithms leads to benefits from the capability of a given detector/descriptor (e.g., high localization accuracy of SURF descriptor) to compensate the weakness of other one (e.g., less localization accuracy of BRISK descriptor) or vice versa.
Upon inspecting the results, the provided survey on the offset tracking techniques shows that a single all-purpose algorithm to be able to extract offsets in all situations does not exist. Each of the different approaches has relative advantages and drawbacks, dependent on data properties, features and application.
In summary, although the InSAR-based techniques could provide more precise results, in cases of low coherence, high velocity rate and non-LOS movement, the area and feature-based matching techniques could be used as a robust alternative candidate for offset estimation.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}