A Topography-Informed Morphology Approach for Automatic Identification of Forest Gaps Critical to the Release of Avalanches

Abstract
:
1. Introduction
1.1. Context and Problem
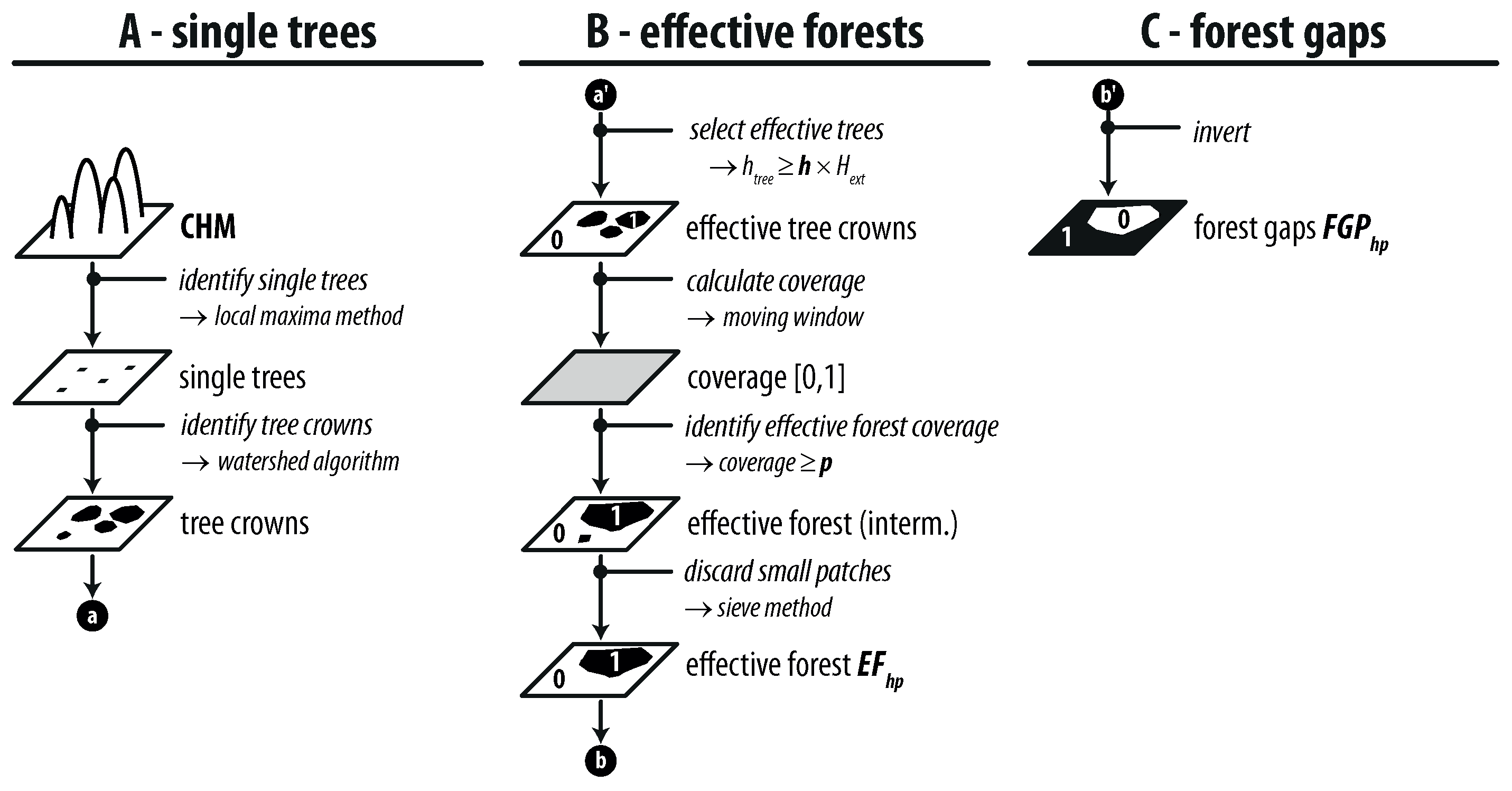
1.2. Airborne LiDAR-Based Forest Characterization
1.3. Mathematical Morphology and Its Basic Operations
2. Model Development
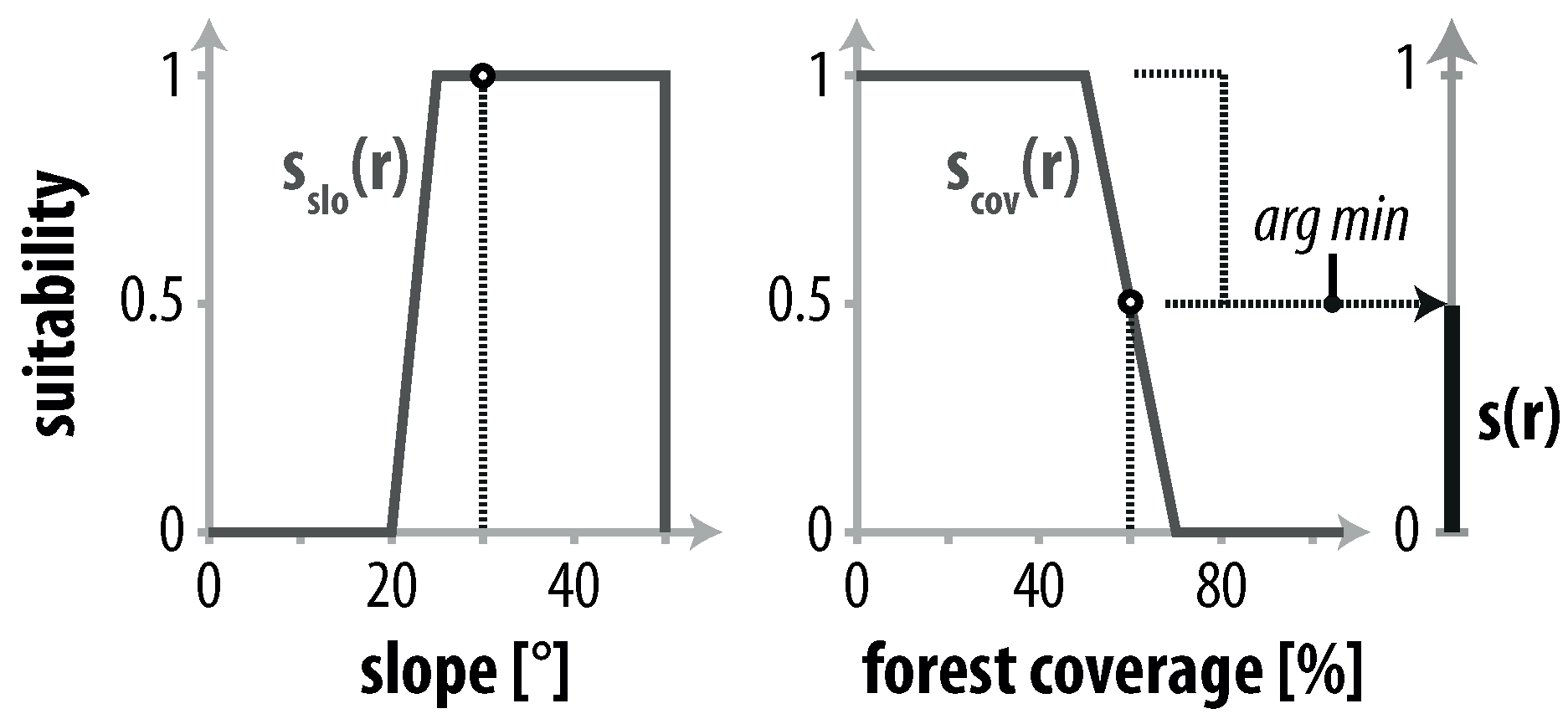
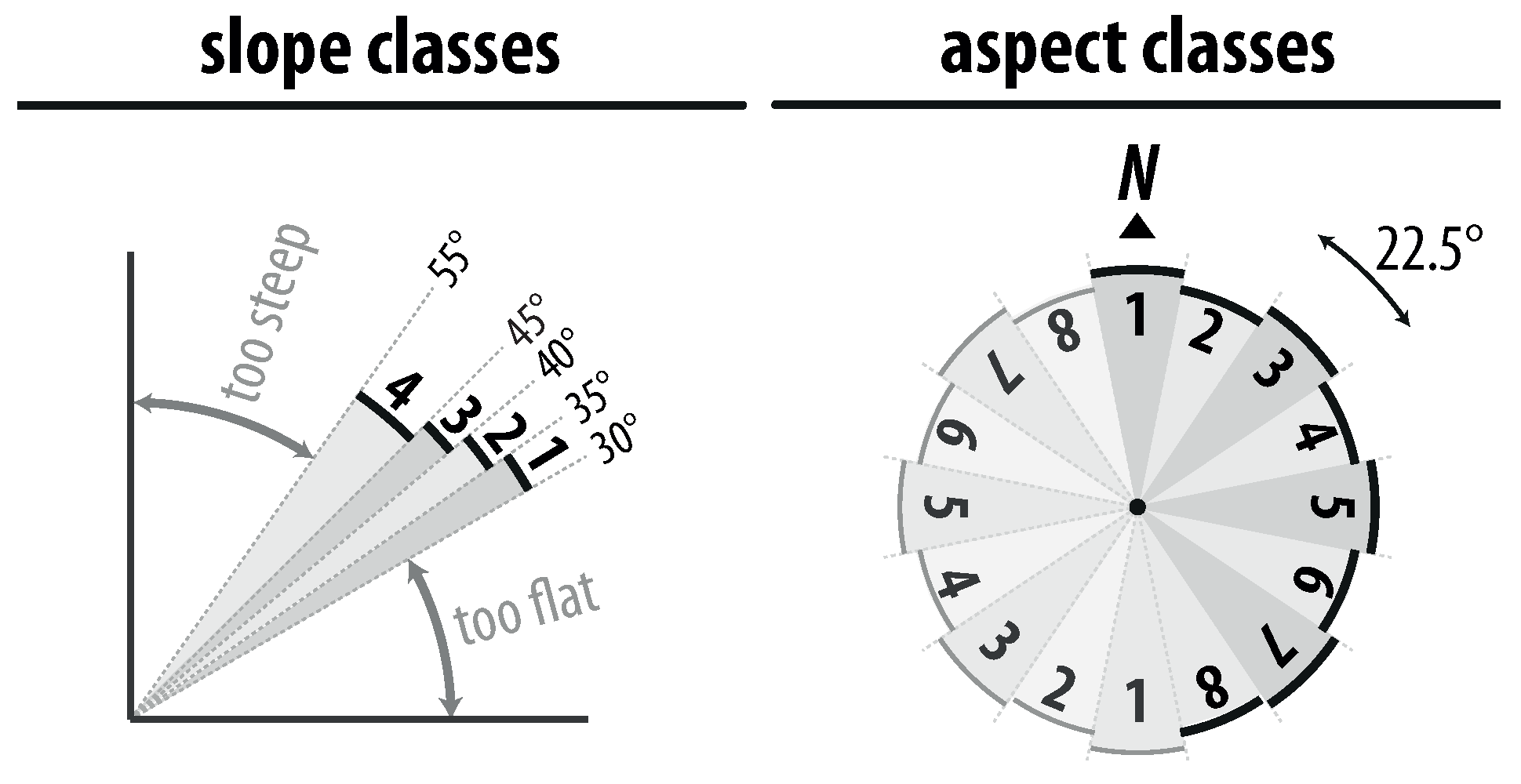
2.1. Computation of Topographic Classes
2.2. Computation of Forest Gaps
2.3. Model Validation
2.4. Model Implementation
3. Application to a Subalpine Study Area
3.1. Set-Up of Topography in TIMA
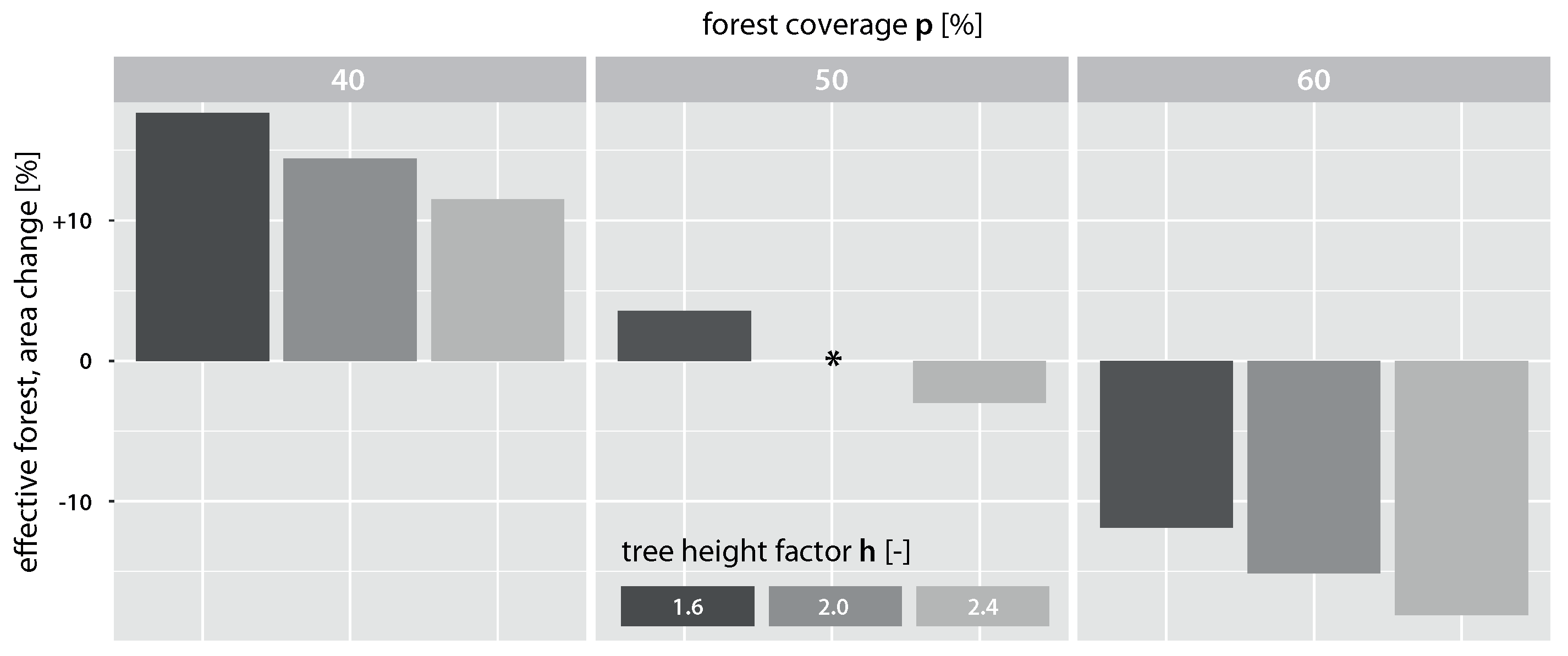
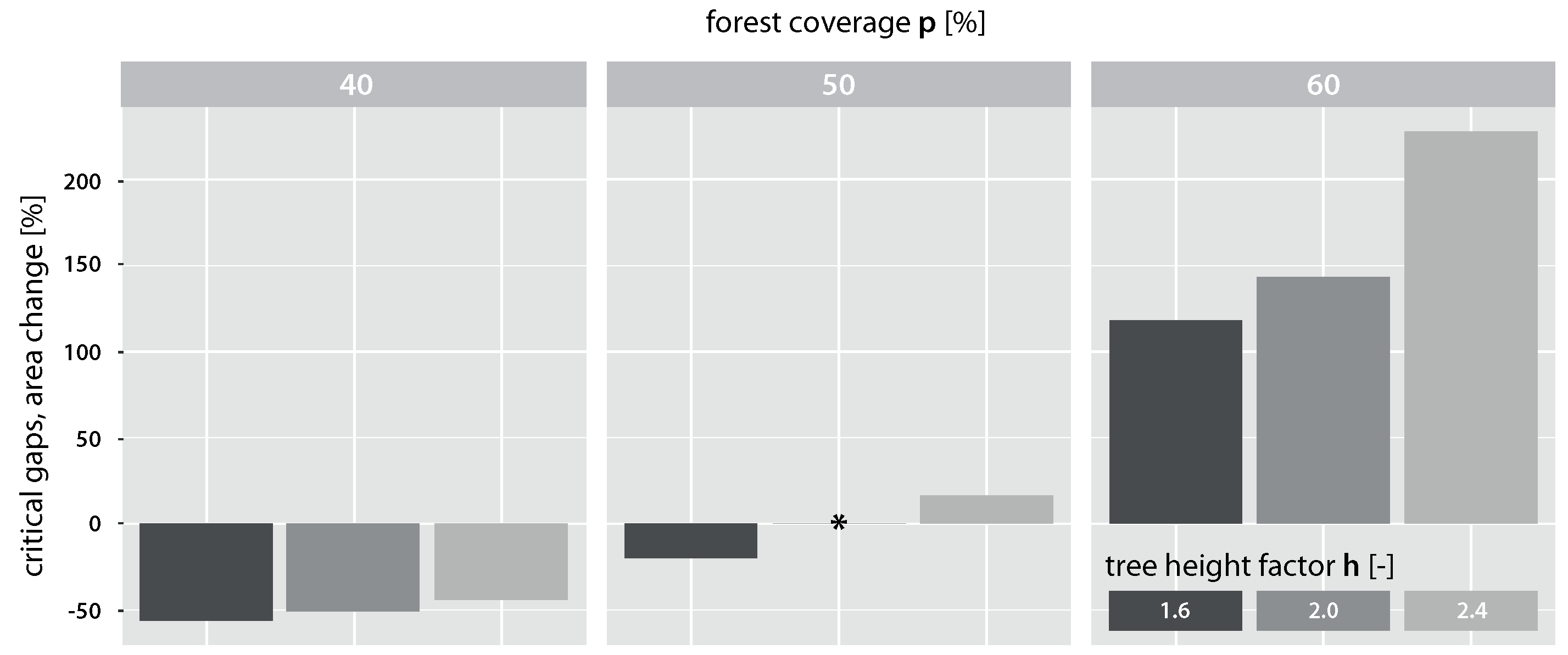
3.2. Sensitivity of Critical-Gap Detection on Effective-Forest Specification
3.3. Map Validation
3.4. Linear Features Decoupling the Snow Layer
4. Discussion
- Single trees delineated on the CHM are a convenient means to identify forests effective against the release of snow avalanches based on forest parameter thresholds. The detection of critical gaps turned out to be very sensitive to the thresholds for forest parameters that specify effective forests. For example, raising the minimum required forest coverage from 50 to 60% resulted in a 130%-increment of critical-gap area. Therefore, mapping critical gaps using detection rates appropriately communicates both the locations of critical gaps and their sensitivity to effective forest parametrization.
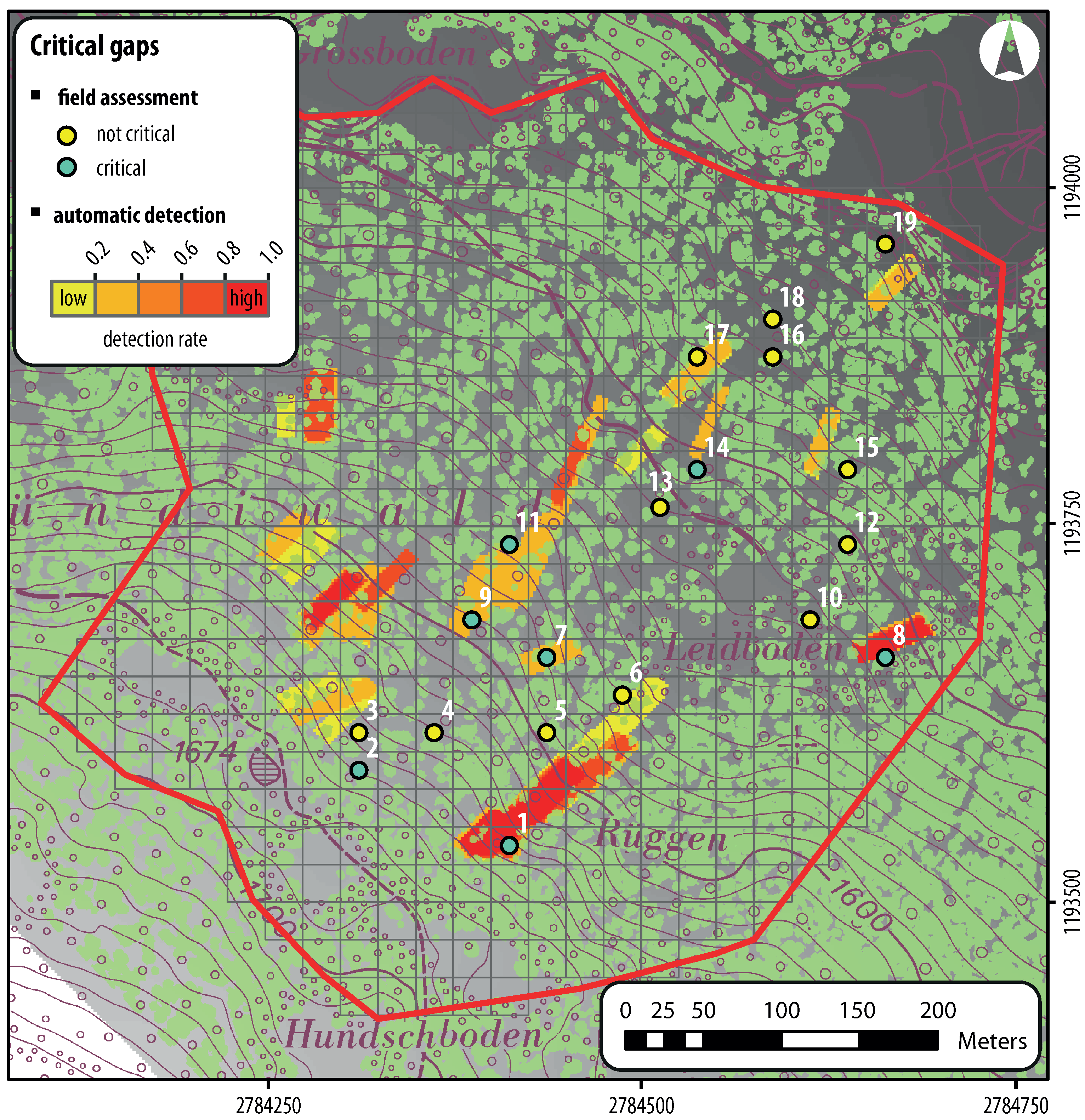
- The critical-gap map identifies areas with and without critical gaps at an 84% overall accuracy when compared with the results of a field assessment (n = 19). The Kappa value = 0.67 indicates substantial agreement between detection and field observation.
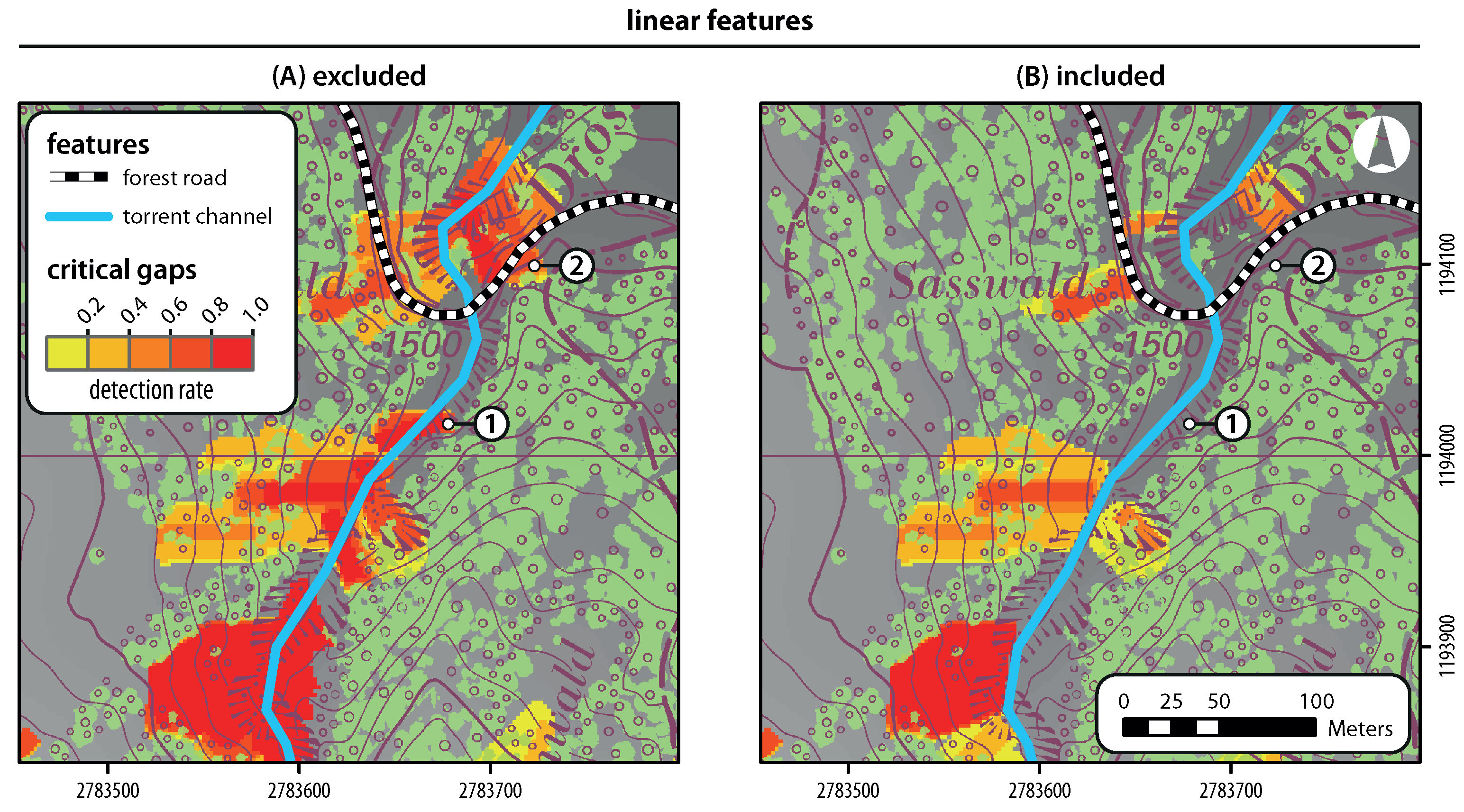
- TIMA can include linear features (forest roads and torrent channels) that decouple the snow layer when updating the forest gap raster with their locations. Thus, the generalized topography-characterization based on topoclasses can be improved with local topography information decisive to critical-gap detection.
4.1. Implications for Practitioners and Research
4.2. Aspects of Forest Characterization
4.3. Aspects of Topography Characterization
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Step Determining Non-Criticality | Critical Gap: Field | Critical Gap: Map |
|---|---|---|---|
| 1 | none | yes | yes |
| 2 | none | yes | no |
| 3 | step 3: gap too short | no | no |
| 4 | step 2: not steep enough | no | no |
| 5 | step 1: no gap | no | no |
| 6 | step 1: no gap | no | yes |
| 7 | none, trees in gap neglectable | yes | yes |
| 8 | none | yes | yes |
| 9 | none, trees in gap neglectable | yes | yes |
| 10 | step 2: not steep enough | no | no |
| 11 | none, trees in gap neglectable | yes | yes |
| 12 | step 1: no gap | no | no |
| 13 | step 2: not steep enough | no | no |
| 14 | none, trees in gap neglectable | yes | yes |
| 15 | step 3: gap too short | no | no |
| 16 | step 2: not steep enough | no | no |
| 17 | step 3: gap too short, wooden hillslope stabilization structure | no | yes |
| 18 | step 2: not steep enough | no | no |
| 19 | step 3: gap too short | no | no |
References
- Brang, P.; Schönenberger, W.; Frehner, M.; Schwitter, R.; Thormann, J.J.; Wasser, B. Management of protection forests in the European Alps: An overview. For. Snow Landsc. Res. 2006, 80, 23–44. [Google Scholar]
- Losey, S.; Wehrli, A. Schutzwald in Der Schweiz. Vom Projekt SilvaProtect-CH Zum Harmonisierten Schutzwald; Federal Office of the Environment FOEN: Berne, Switzerland, 2013; p. 29. [Google Scholar]
- McClung, D.; Schaerer, P. The Avalanche Handbook; The Mountaineers: Seattle, WA, USA, 1993; p. 271. [Google Scholar]
- Meyer-Grass, M.; Schneebeli, M. Die Abhängigkeit der Waldlawinen von Standorts-, Bestandes-und Schneeverhältnissen. In Interpraevent 1992—Conference Proceedings. Berne, Switzerland; pp. 443–454. Available online: http://www.interpraevent.at/palm-cms/upload_files/Publikationen/Tagungsbeitraege/1992_2_443.pdf (accessed on 4 March 2018).
- Frehner, M.; Wasser, B.; Schwitter, R. Sustainability and Success Monitoring in Protection Forests—Appendix 1: Natural Hazards; Federal Office for the Environment FOEN: Berne, Switzerland, 2007; p. 26. [Google Scholar]
- Margreth, S. Die Wirkung des Waldes bei Lawinen. In Proceedings of the Forum für Wissen “Schutzwald und Naturgefahren”, Birmensdorf, Switzerland, 28–29 October 2008; pp. 21–26. Available online: https://www.waldwissen.net/wald/schutzfunktion/schnee/wsl_wald_lawinen/wsl_wald_lawinen_originalartikel.pdf (accessed on 4 March 2018).
- Courbaud, B.; Gauquelin, X. Guide des Sylvicultures de Montagne-Alpes du Nord Françaises; Office National des Forêts: Grenoble, France, 2006; p. 289. [Google Scholar]
- Margreth, S.; Burkard, A.; Burri, H. Beurteilung der Wirkung von Schutzmassnahmen gegen Naturgefahren als Grundlage für ihre Berücksichtigung in der Raumplanung; National Platform for Natural Hazards (PLANAT): Berne, Switzerland, 2008; p. 51. [Google Scholar]
- Vacik, H.; de Jel, S.; Ruprecht, H.; Gruber, G. Waldtypisierung Südtirol; Autonome Provinz Bozen-Südtirol: Bozen, Italy, 2010. [Google Scholar]
- Hotter, M.; Simon, A.; Vacik, H. Waldtypisierung Tirol; Amt der Tiroler Landesregierung: Innsbruck, Austria, 2013.
- Weir, P. Snow Avalanche Management in Forested Terrain; Number 55 in Land Management Handbook, BC Ministry of Forests: Victoria, BC, USA, 2002; p. 190.
- Feistl, T.; Bebi, P.; Dreier, L.; Hanewinkel, M.; Bartelt, P. Quantification of basal friction for technical and silvicultural glide-snow avalanche mitigation measures. Nat. Hazards Earth Syst. Sci. 2014, 14, 2921. [Google Scholar] [CrossRef]
- Margreth, S. Lawinenverbau im Anbruchgebiet; Federal Office for the Environment: Berne, Switzerland, 2007; p. 136. [Google Scholar]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital Terrain Modeling—A Review of Hydrological, Geomorphological, and Biological Applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Maltamo, M.; Naesset, E.; Vauhkonen, J. Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies Preface; Springer: Dordrecht, The Netherlands, 2014; p. 464. [Google Scholar]
- Buhler, Y.; Kumar, S.; Veitinger, J.; Christen, M.; Stoffel, A.; Snehmani. Automated identification of potential snow avalanche release areas based on digital elevation models. Nat. Hazards Earth Syst. Sci. 2013, 13, 1321–1335. [Google Scholar] [CrossRef]
- Ghinoi, A.; Chung, C.J. STARTER: A statistical GIS-based model for the prediction of snow avalanche susceptibility using terrain features—Application to Alta Val Badia, Italian Dolomites. Geomorphology 2005, 66, 305–325. [Google Scholar] [CrossRef]
- Maggioni, M. Avalanche Release Areas and Their Influence on Uncertainty In Avalanche Hazard Mapping. Ph.D. Thesis, University of Zurich, Zurich, Switzerland, 2005. [Google Scholar]
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comput. Vis. Gr. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Soille, P. Morphological Image Analysis Principles and Applications, 2nd ed.; Springer: Berlin, Germany, 2003; p. 391. [Google Scholar]
- Koukoulas, S.; Blackburn, G.A. Quantifying the spatial properties of forest canopy gaps using LiDAR imagery and GIS. Int. J. Remote Sens. 2004, 25, 3049–3072. [Google Scholar] [CrossRef]
- Hediger, M.; Ginzler, C.; Köchli, D. Erkennung von Waldstrukturen aus flugzeuggestützten Fernerkundungsdaten—Vergleich von Airborne Laserscanning und digitaler Photogrammetrie. In Angewandte Geoinformatik 2012: Beiträge zum 24. AGIT-Symposium Salzburg; Strobl, J., Blaschke, T., Griesebner, G., Eds.; Wichmann Verlag: Berlin, Germany, 2012; pp. 62–71. [Google Scholar]
- Flood, M. Laser altimetry: From science to commercial lidar mapping. Photogramm. Eng. Remote Sens. 2001, 67, 1209–1217. [Google Scholar]
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M.; Wang, T.J.; Hussin, Y.A. Generating pit-free canopy height models from airborne lidar. Photogramm. Eng. Remote Sens. 2014, 80, 863–872. [Google Scholar] [CrossRef]
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M. Generating spike-free digital surface models using lidar raw point clouds: A new approach for forestry applications. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 104–114. [Google Scholar] [CrossRef]
- Wang, Y.; Weinacker, H.; Koch, B.; Sterenczak, K. Lidar point cloud based fully automatic 3D single tree modelling in forest and evaluations of the procedure. Int. Arch. Photogramm. Remote Sens. Spatial Inform. Sci. 2008, 37, 45–51. [Google Scholar]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- Holmgren, J.; Johansson, F.; Olofsson, K.; Olsson, H.; Glimskär, A. Estimation of crown coverage using airborne laser scanning. In Proceedings of the SilviLaser, Edinburgh, UK, 17–19 September 2008; pp. 50–57. [Google Scholar]
- Andersen, H.E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Gaveau, D.L.A.; Hill, R.A. Quantifying canopy height underestimation by laser pulse penetration in small-footprint airborne laser scanning data. Can. J. Remote Sens. 2003, 29, 650–657. [Google Scholar] [CrossRef]
- Sačkov, I.; Hlasny, T.; Bucha, T.; Juriš, M. Integration of tree allometry rules to treetops detection and tree crowns delineation using airborne lidar data. iFor. Biogeosci. For. 2017, 10, 459–467. [Google Scholar] [CrossRef]
- Lamprecht, S.; Stoffels, J.; Dotzler, S.; Haß, E.; Udelhoven, T. aTrunk—An ALS-based trunk detection algorithm. Remote Sens. 2015, 7, 9975–9997. [Google Scholar] [CrossRef]
- Hyyppa, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A segmentation-based method to retrieve stem volume estimates from 3-D tree height models produced by laser scanners. IEEE Trans. Geosci. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Persson, A.; Holmgren, J.; Soderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Estimating plot-level tree heights with lidar: Local filtering with a canopy-height based variable window size. Comput. Electron. Agric. 2002, 37, 71–95. [Google Scholar] [CrossRef]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of individual tree crowns in airborne lidar data. Photogramm. Eng. Remote Sens. 2006, 72, 357–363. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppa, J.; Yu, X.W.; Vastaranta, M.; Hyyppa, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An International Comparison of Individual Tree Detection and Extraction Using Airborne Laser Scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkanen, J.; Solberg, S.; Wang, Y.S.; Weinacker, H.; Hauglin, K.M.; et al. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2012, 85, 27–40. [Google Scholar] [CrossRef]
- Vincent, L.; Soille, P. Watersheds in Digital Spaces—An Efficient Algorithm Based on Immersion Simulations. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 583–598. [Google Scholar] [CrossRef]
- Duncanson, L.I.; Cook, B.D.; Hurtt, G.C.; Dubayah, R.O. An efficient, multi-layered crown delineation algorithm for mapping individual tree structure across multiple ecosystems. Remote Sens. Environ. 2014, 154, 378–386. [Google Scholar] [CrossRef]
- Schardt, M.; Ziegler, M.; Wimmer, A.; Wack, R.; Hyyppa, J. Assessment of forest parameters by means of laser scanning. Int. Arch. Photogramm. Remote Sens. Spatial Inform. Sci. 2002, 34, 302–309. [Google Scholar]
- Dougherty, E.R.; Lotufo, R.A. Hands-on Morphological Image Processing; SPIE Press: Bellingham, WA, USA, 2003; p. 272. [Google Scholar]
- Soille, P.; Gratin, C. An efficient algorithm for drainage network extraction on DEMs. J. Vis. Commun. Image Represent. 1994, 5, 181–189. [Google Scholar]
- Li, Y.; Zhu, L.; Tachibana, K.; Shimamura, H. Morphological operation based dense houses extraction from DSM. Int. Arch. Photogramm. Remote Sens. Spatial Inform. Sci. 2014, 40, 183–189. [Google Scholar] [CrossRef]
- Andersen, H.E.; Reutebuch, S.E.; Schreuder, G.F. Automated individual tree measurement through morphological analysis of a LIDAR-based canopy surface model. In Proceedings of the 1st International Precision Forestry Symposium, Seattle, WA, USA, 17–20 June 2001; pp. 11–21. [Google Scholar]
- Zhang, K.Q. Identification of gaps in mangrove forests with airborne LIDAR. Remote Sens. Environ. 2008, 112, 2309–2325. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data Principles And Practices, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009; p. 183. [Google Scholar]
- Särndal, C.E.; Swensson, B.; Wretman, J. Model Assisted Survey Sampling; Springer: New York, NY, USA, 2003; p. 694. [Google Scholar]
- Zadeh, L.A. Fuzzy Sets. Inform. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Evans, J.S.; Oakleaf, J.; Cushman, S.; Theobald, D. An ArcGIS Toolbox for Surface Gradient and Geomorphometric Modeling, version 2.0-0; 2014. Available online: http://evansmurphy.wixsite.com/evansspatial/arcgis-gradient-metrics-toolbox (accessed on 4 March 2018).
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- Wischmeier, W.H.; Smith, D.D. A universal soil-loss equation to guide conservation farm planning. Trans. 7th int. Congr. Soil Sci. 1960, 1, 418–425. [Google Scholar]
- Koka, S.; Anada, K.; Nomaki, K.; Sugita, K.; Tsuchida, K.; Yaku, T. Ridge Detection with the Steepest Ascent Method. Procedia Comput. Sci. 2011, 4, 216–221. [Google Scholar] [CrossRef]
- Rana, S. Use of Plan Curvature Variations for the Identification of Ridges and Channels on DEM. In Progress in Spatial Data Handling: 12th International Symposium on Spatial Data Handling; Riedl, A., Kainz, W., Elmes, G.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 789–804. [Google Scholar]









| Steepness [°] | Critical-Gap Length in Slope-Line Direction [m] |
|---|---|
| ≥30 | 60 |
| ≥35 | 50 |
| ≥40 | 40 |
| ≥45 | 30 |
| Step | Question | Action |
|---|---|---|
| 1 | Is there is a gap close to the center of the 25 × 25 m cell? | Visual inspection |
| 2 | Is the local slope equal or steeper than 30? | Measure the slope in slope-line direction within a distance of 10 m around the center |
| 3 | Is the gap long and steep enough to be classified “critical” according to the guidelines (Table 1)? | Measure the slant distance and the slope of the gap |
| 4 | Is the gap wide enough (i.e., ≥10 m)? | Measure gap width |
| 5 | Is the presence of trees in the gap neglectable? | Visual inspection whether trees are grouped |
| Attribute | Unit | Value |
|---|---|---|
| Instrument | Riegl LMS Q 560 | |
| Beam deflection | Rotating mirror | |
| Time of acquisition | 11–15 September 2010 | |
| Pulse Repetition Frequency | kHz | 70 |
| Flight altitude | m | 700 |
| Max. scan angle | ° | ±15 |
| Wavelength | nm | 1550 |
| Beam divergence | mrad | ≤0.5 |
| Avg. echo density | m | 27.4 |
| Classification | References | Producer’s Accuracy[%] | User’s Accuracy[%] | ||
|---|---|---|---|---|---|
| Yes | No | Total | |||
| Yes | 6 | 2 | 8 | 86% | 75% |
| No | 1 | 10 | 11 | 83% | 91% |
| Total | 7 | 12 | 19 | Overall accuracy: 84%; Cohen’s Kappa : 0.67 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Breschan, J.R.; Gabriel, A.; Frehner, M. A Topography-Informed Morphology Approach for Automatic Identification of Forest Gaps Critical to the Release of Avalanches. Remote Sens. 2018, 10, 433. https://doi.org/10.3390/rs10030433
Breschan JR, Gabriel A, Frehner M. A Topography-Informed Morphology Approach for Automatic Identification of Forest Gaps Critical to the Release of Avalanches. Remote Sensing. 2018; 10(3):433. https://doi.org/10.3390/rs10030433
Chicago/Turabian StyleBreschan, Jochen Ruben, Andreas Gabriel, and Monika Frehner. 2018. "A Topography-Informed Morphology Approach for Automatic Identification of Forest Gaps Critical to the Release of Avalanches" Remote Sensing 10, no. 3: 433. https://doi.org/10.3390/rs10030433
APA StyleBreschan, J. R., Gabriel, A., & Frehner, M. (2018). A Topography-Informed Morphology Approach for Automatic Identification of Forest Gaps Critical to the Release of Avalanches. Remote Sensing, 10(3), 433. https://doi.org/10.3390/rs10030433