Calculating Viewing Angles Pixel by Pixel in Optical Remote Sensing Satellite Imagery Using the Rational Function Model


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Rational Function Model Expression
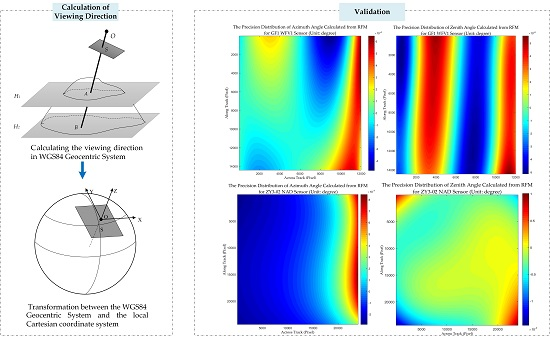
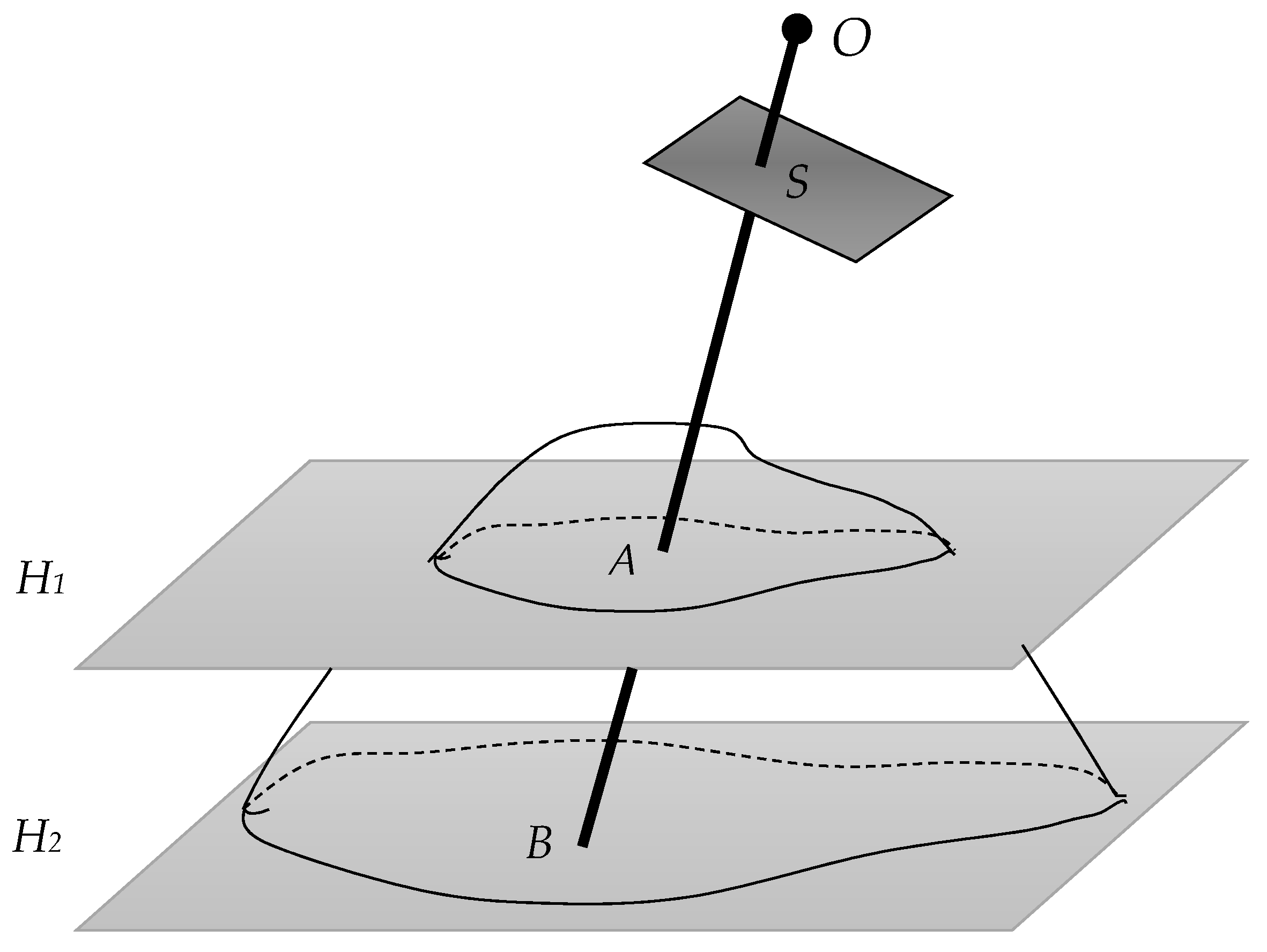
2.2. Calculation of Viewing Direction
2.2.1. Principles of Calculating the Viewing Direction in the WGS84 Geocentric System
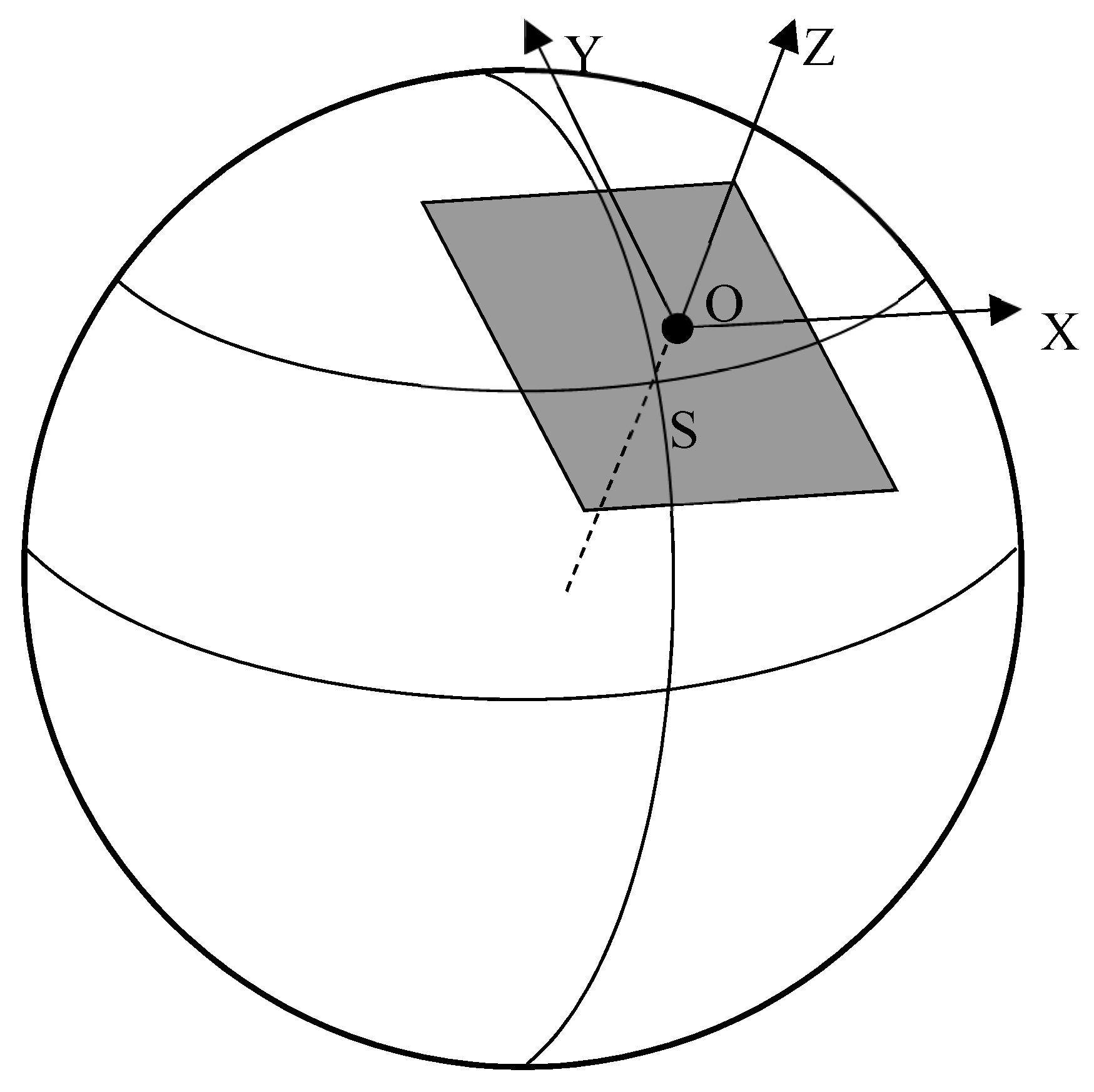
2.2.2. Transformation between the WGS84 Geocentric System and the Local Cartesian Coordinate System
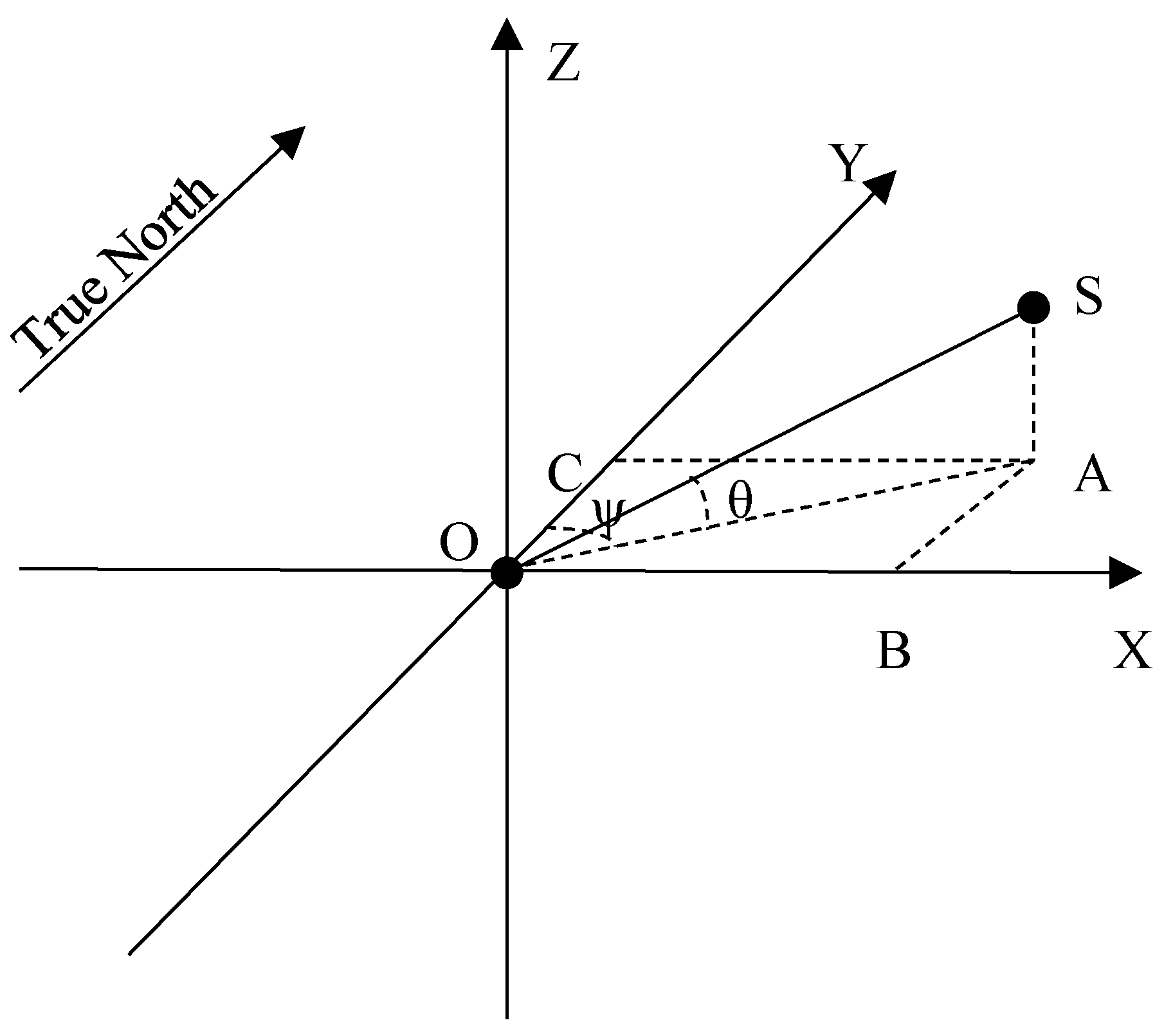
2.2.3. Calculating the Viewing Zenith and Azimuth Angles
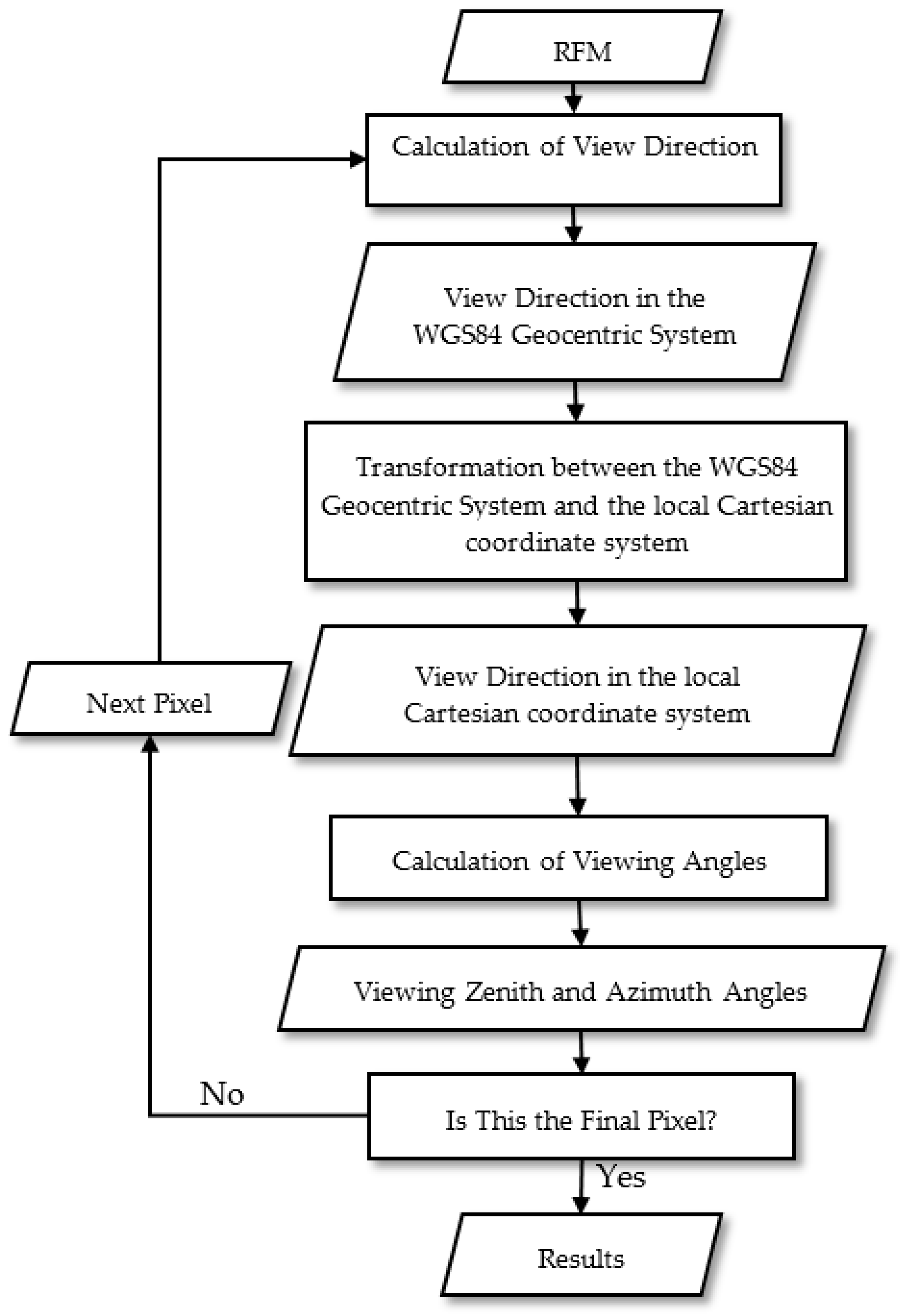
2.3. Workfolow
- (1)
- The RFM is obtained, and the view direction in the WGS84 geocentric system is calculated based on the space-vector information of observed light implied by the RFM.
- (2)
- The viewing direction is transformed from the WGS84 geocentric system to the local Cartesian coordinate system.
- (3)
- The viewing zenith and azimuth angles can be calculated in the local Cartesian coordinate system.
- (4)
- If there are pixels that are not calculated, then the first three steps are repeated to solve the next pixel. Finally, all of the the zenith and azimuth angles for all pixels are outputted.
3. Results and Discussion
3.1. Test Datasets and Evaluation Criterion
- (1)
- Establish the rigorous geometric model based on the corresponding original Level-0 products including interior and exterior parameters.
- (2)
- Calculating the viewing angles of any pixel by the rigorous geometric model established in step 1) using Equation (6) and by the proposed method separately, and then the deviation is calculated.
- (3)
- Statistics deviations of all pixels to calculate the minimum, maximum, and root mean square (RMS).
3.2. Minimum and Maximum Elevation Plane for Calculation
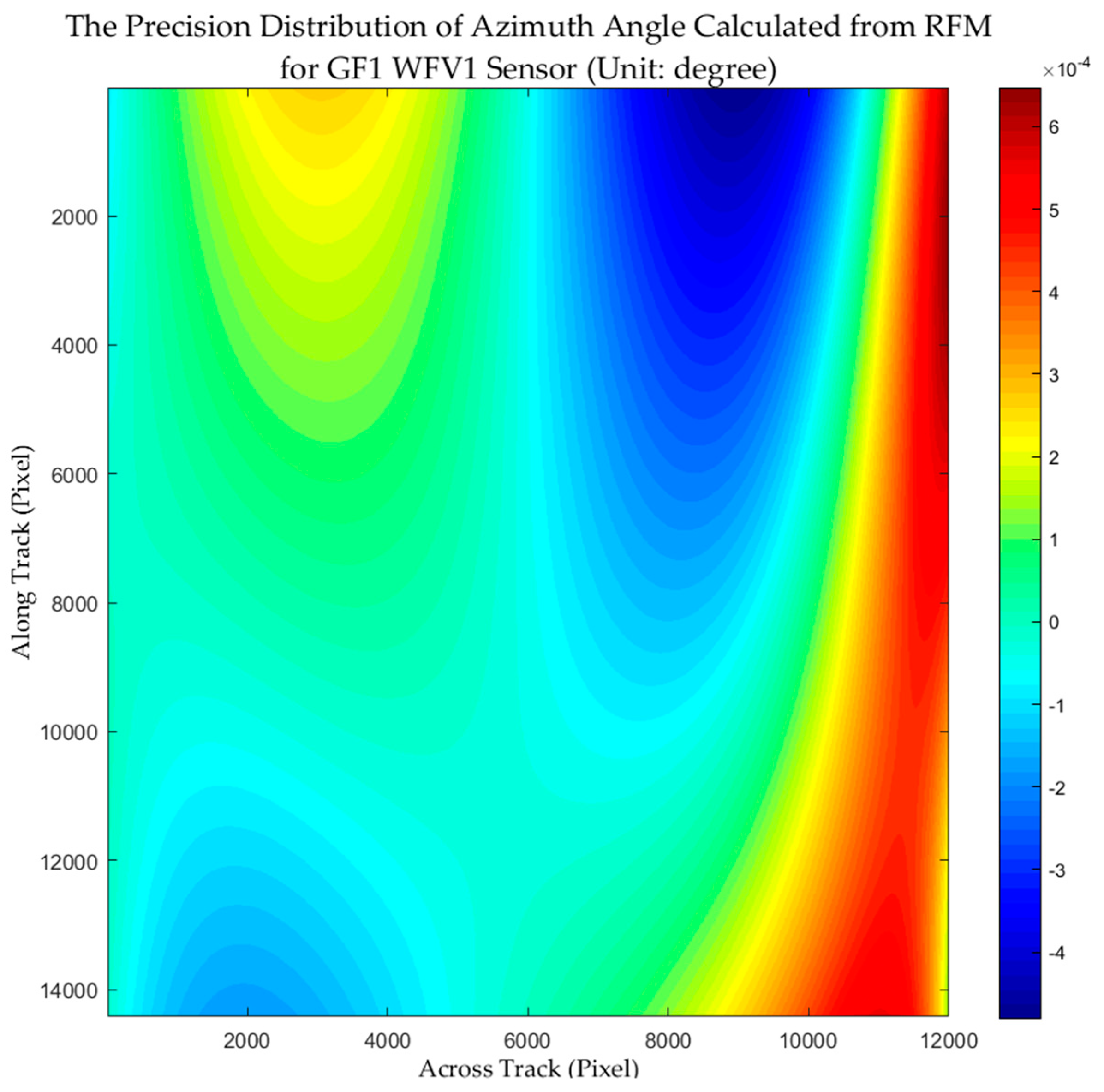
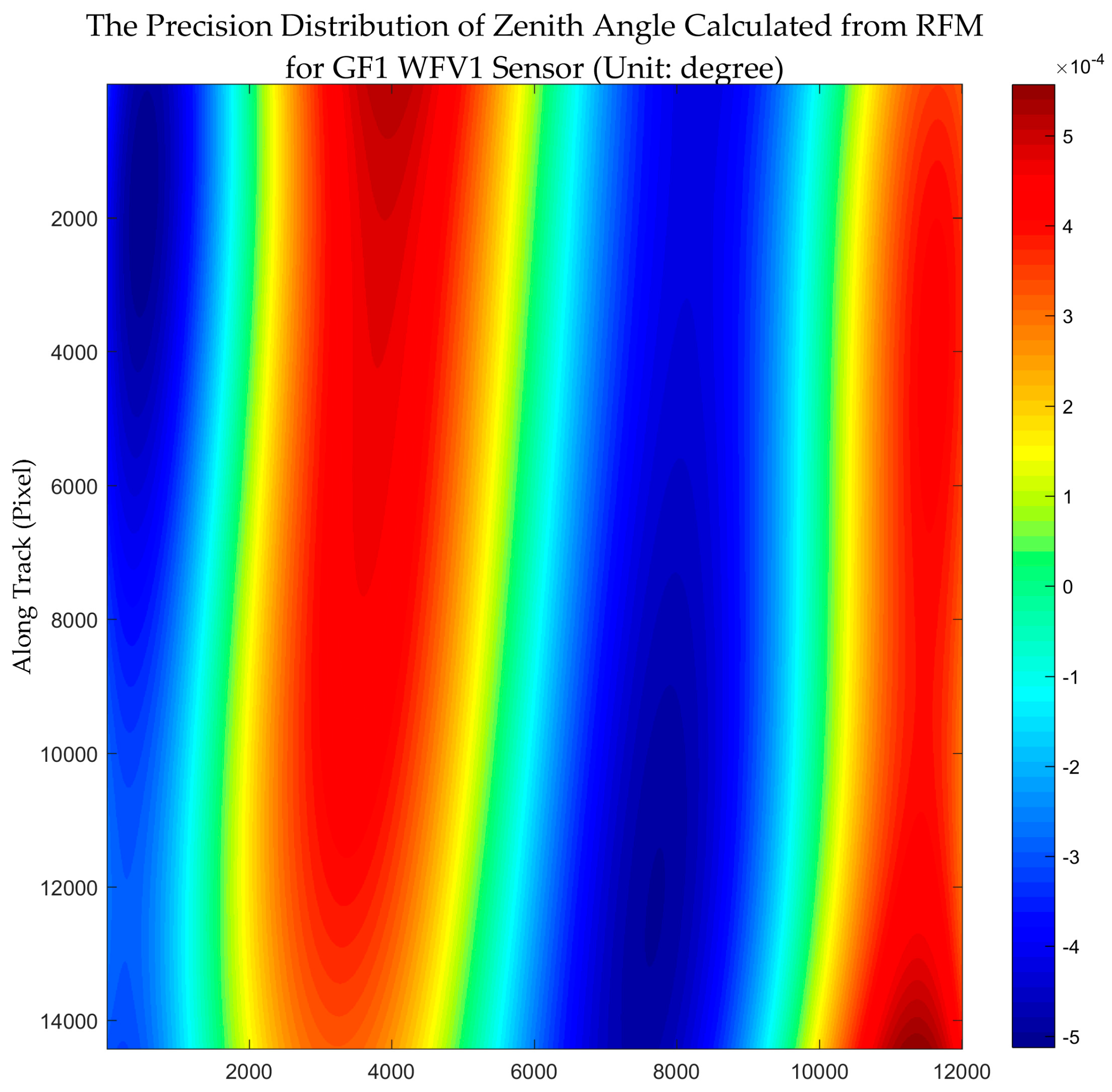
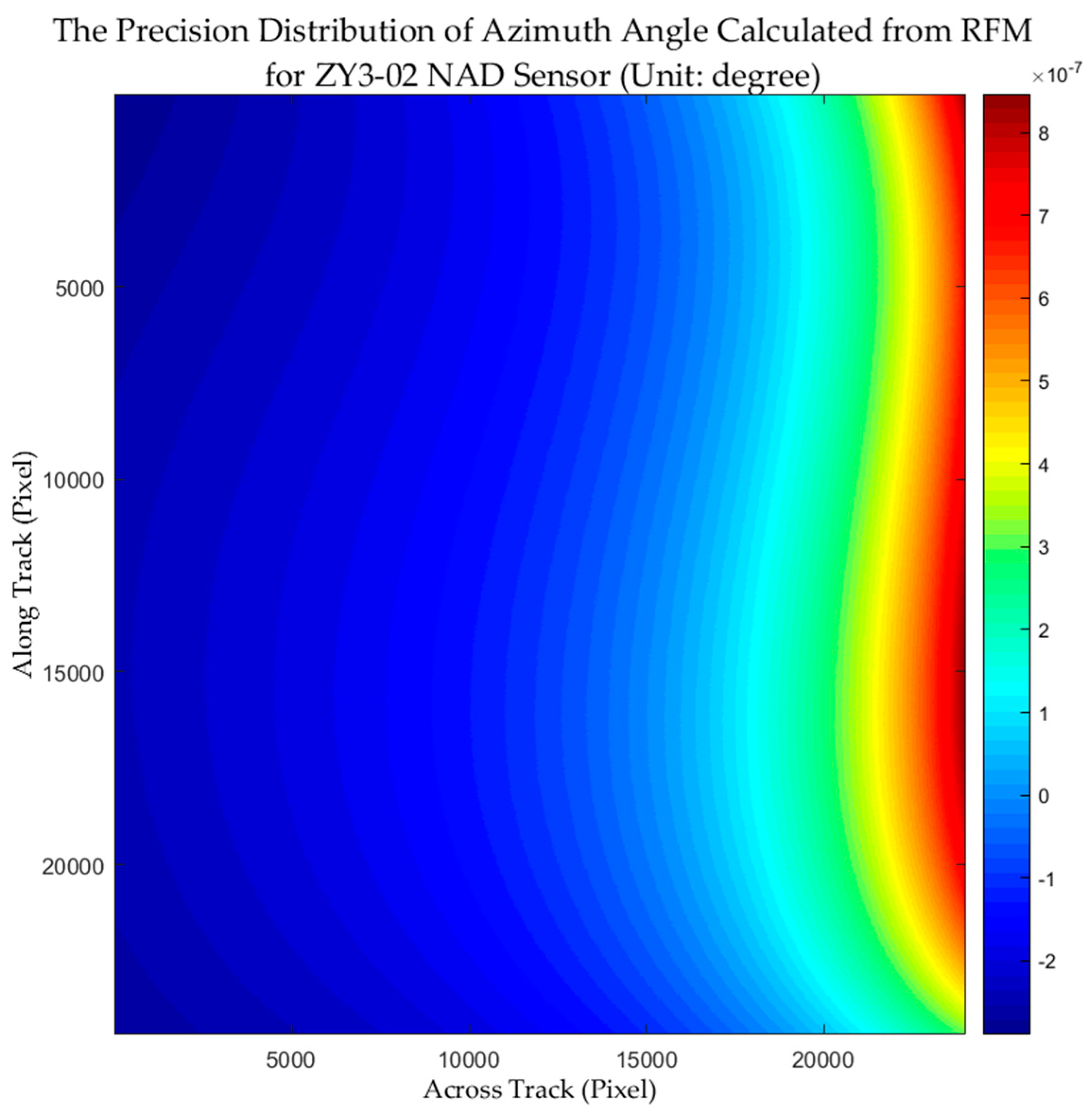
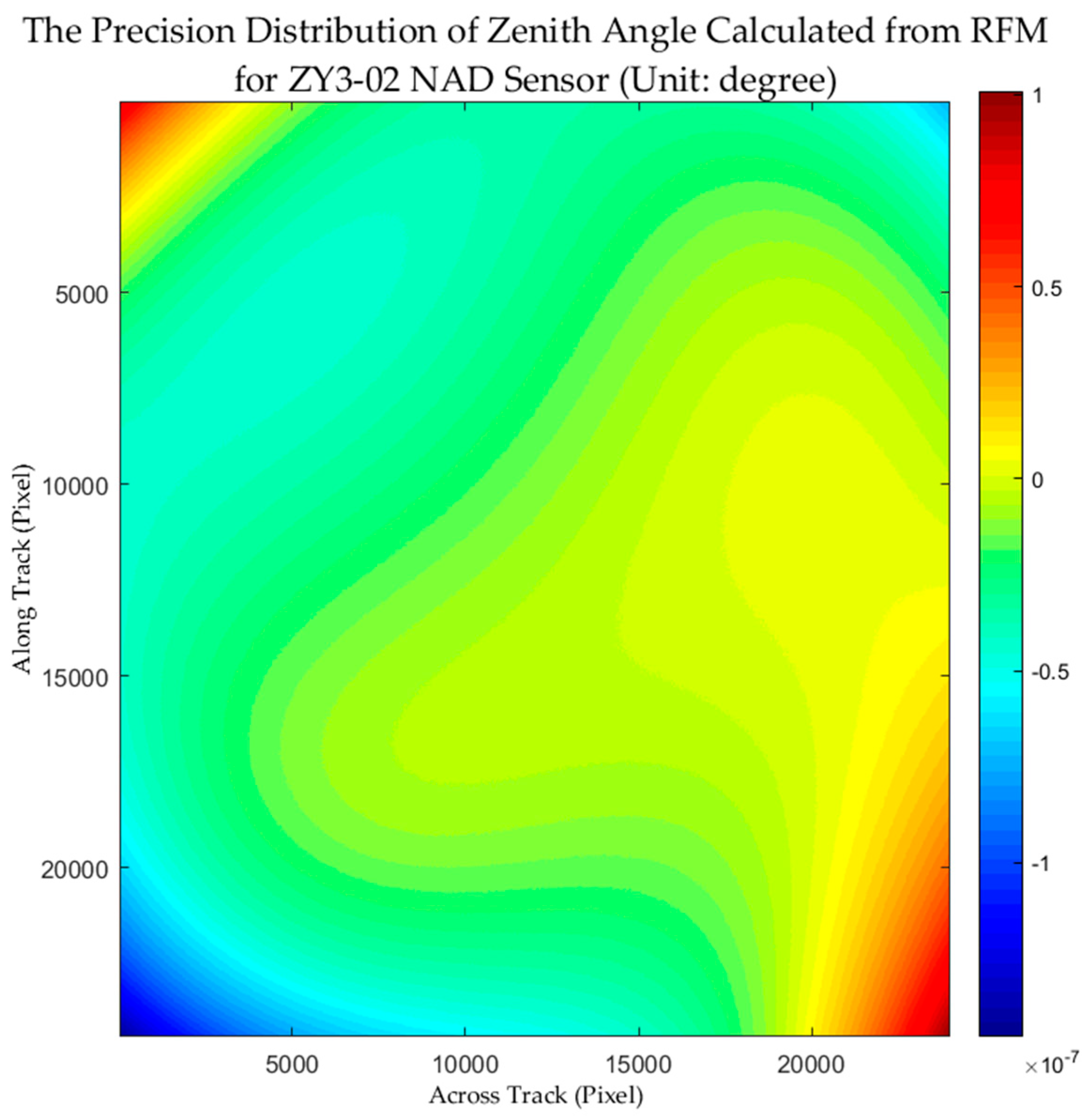
3.3. Precision of RFM-Calculated Viewing Angles
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dickinson, R.E. Land processes in climate models. Remote Sens. Environ. 1995, 51, 27–38. [Google Scholar] [CrossRef]
- Mason, P.J.; Zillman, J.W.; Simmons, A.; Lindstrom, E.J.; Harrison, D.E.; Dolman, H.; Bojinski, S.; Fischer, A.; Latham, J.; Rasmussen, J. Implementation Plan for the Global Observing System for Climate in Support of the UNFCCC (2010 Update). Lect. Notes Phys. 2010, 275, 287–306. [Google Scholar]
- Wang, Z.J.; Coburn, C.A.; Ren, X.M.; Teillet, P.M. Effect of surface roughness, wavelength, illumination, and viewing zenith angles on soil surface BRDF using an imaging BRDF approach. Int. J. Remote Sens. 2014, 35, 6894–6913. [Google Scholar] [CrossRef]
- Sims, D.A.; Rahman, A.F.; Vermote, E.F.; Jiang, Z.N. Seasonal and inter-annual variation in view angle effects on MODIS vegetation indices at three forest sites. Remote Sens. Environ. 2011, 115, 3112–3120. [Google Scholar] [CrossRef]
- Van Leeuwen, W.J.; Huete, A.R.; Laing, T.W.; Didan, K. Vegetation change monitoring with spectral indices: The importance of view and sun angle standardized data. In Remote Sensing for Earth Science, Ocean, and Sea Ice Applications; International Society for Optics and Photonics: Bellingham, WA, USA, 1999; p. 10. [Google Scholar]
- Bognár, P. Correction of the effect of Sun-sensor-target geometry in NOAA AVHRR data. Int. J. Remote Sens. 2003, 24, 2153–2166. [Google Scholar] [CrossRef]
- Bucher, T.U. Directional effects (view angle, sun angle, flight direction) in multi-angular high-resolution image data: Examples and conclusions from HRSC-A(X) flight campaigns. Proc. SPIE Int. Soc. Opt. Eng. 2004, 5239, 234–243. [Google Scholar]
- Pocewicz, A.; Vierling, L.A.; Lentile, L.B.; Smith, R. View angle effects on relationships between MISR vegetation indices and leaf area index in a recently burned ponderosa pine forest. Remote Sens. Environ. 2007, 107, 322–333. [Google Scholar] [CrossRef]
- Verrelst, J.; Schaepman, M.E.; Koetz, B.; Kneubühler, M. Angular sensitivity analysis of vegetation indices derived from CHRIS/PROBA data. Remote Sens. Environ. 2008, 112, 2341–2353. [Google Scholar] [CrossRef]
- Niu, Z.; Wang, C.; Wang, W.; Zhang, Q.; Young, S.S. Estimating bidirectional angles in NOAA AVHRR images. Int. J. Remote Sens. 2001, 22, 1609–1615. [Google Scholar] [CrossRef]
- Isaacman, A.T.; Toller, G.N.; Barnes, W.L.; Guenther, B.W.; Xiong, X. MODIS Level 1B calibration and data products. In Proceedings of Optical Science and Technology, SPIE’s 48th Annual Meeting; International Society for Optics and Photonics: Bellingham, WA, USA, 2003; p. 11. [Google Scholar]
- Tao, C.V.; Hu, Y. A Comprehensive study of the rational function model for photogrammetric processing. Photogramm. Eng. Remote Sens. 2001, 67, 1347–1357. [Google Scholar]
- Grodecki, J. IKONOS stereo feature extraction—RPC approach. In Proceedings of the 2001 ASPRS Annual Conference, St. Louis, MO, USA, 23–27 April 2001. [Google Scholar]
- Lutes, J. Accuracy analysis of rational polynomial coefficients for Ikonos imagery. In Proceedings of the 2004 Annual Conference of the American Society for Photogrammetry and Remote Sensing (ASPRS), Denver, CO, USA, 23–28 May 2004. [Google Scholar]
- Dial, G.; Bowen, H.; Gerlach, F.; Grodecki, J.; Oleszczuk, R. IKONOS satellite, imagery, and products. Remote Sens. Environ. 2003, 88, 23–36. [Google Scholar] [CrossRef]
- Hashimoto, T. RPC model for ALOS/PRISM images. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 1861–1863. [Google Scholar]
- Nagasubramanian, V.; Radhadevi, P.V.; Ramachandran, R.; Krishnan, R. Rational function model for sensor orientation of IRS-P6 LISS-4 imagery. Photogramm. Record 2007, 22, 309–320. [Google Scholar] [CrossRef]
- Pan, H.B.; Zhang, G.; Tang, X.M.; Li, D.R.; Zhu, X.Y.; Zhou, P.; Jiang, Y.H. Basic Products of the ZiYuan-3 Satellite and Accuracy Evaluation. Photogramm. Eng. Remote Sens. 2013, 79, 1131–1145. [Google Scholar] [CrossRef]
- Xu, K.; Jiang, Y.H.; Zhang, G.; Zhang, Q.J.; Wang, X. Geometric Potential Assessment for ZY3-02 Triple Linear Array Imagery. Remote Sens. 2017, 9, 658. [Google Scholar] [CrossRef]
- Zhang, G.; Jiang, Y.H.; Li, D.R.; Huang, W.C.; Pan, H.B.; Tang, X.M.; Zhu, X.Y. In-Orbit Geometric Calibration And Validation Of Zy-3 Linear Array Sensors. Photogramm. Record 2014, 29, 68–88. [Google Scholar] [CrossRef]
- Zhang, G.; Xu, K.; Huang, W.C. Auto-calibration of GF-1 WFV images using flat terrain. ISPRS J. Photogram. Remote Sens. 2017, 134, 59–69. [Google Scholar] [CrossRef]
- Lu, C.L.; Wang, R.; Yin, H. GF-1 Satellite Remote Sensing Characters. Spacecr. Recover. Remote Sens. 2014, 35, 67–73. [Google Scholar]
- Madani, M. Real-time sensor-independent positioning by rationalfunctions. In Proceedings of the ISPRS Workshop on Direct versus Indirect Methods of Sensor Orientation, Barcelona, Spain, 25–26 November 1999; pp. 64–75. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| Elevation (m) | Min. Elevation | 2810 | 500 | 0 | −10,000 | 0 |
| Max. Elevation | 3160 | 501 | 10,000 | 10,000 | 100,000 | |
| Azimuth Angle Precision (°) | RMS | 0.00020 | 0.00019 | 0.00027 | 0.00019 | 0.0034 |
| Max. | 0.00065 | 0.00065 | 0.00088 | 0.00056 | 0.0147 | |
| Min. | 0.00000 | 0.00000 | 0.00000 | 0.00000 | 0.0000 | |
| Zenith Angle Precision (°) | RMS | 0.00032 | 0.00032 | 0.00031 | 0.00032 | 0.0089 |
| Max. | 0.00056 | 0.00057 | 0.00070 | 0.00055 | 0.0183 | |
| Min. | 0.00000 | 0.00000 | 0.00000 | 0.00000 | 0.0000 | |
| Items | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| Elevation (m) | Min. Elevation | 0 | 500 | 0 | −10,000 | 0 |
| Max. Elevation | 950 | 501 | 10,000 | 10,000 | 100,000 | |
| Azimuth Angle Precision (°) | RMS | 2.3 × 10−7 | 6.3 × 10−7 | 5.0 × 10−6 | 6.8 × 10−7 | 0.0034 |
| Max. | 8.0 × 10−7 | 2.8 × 10−5 | 1.2 × 10−5 | 2.2 × 10−6 | 0.0147 | |
| Min. | 0.0000 | 0.0000 | 2.3 × 10−6 | 0.0000 | 0.0000 | |
| Zenith Angle Precision (°) | RMS | 2.8 × 10−8 | 8.8 × 10−8 | 6.5 × 10−8 | 5.4 × 10−8 | 0.0089 |
| Max. | 1.5 × 10−7 | 3.4 × 10−6 | 3.8 × 10−7 | 2.5 × 10−7 | 0.0183 | |
| Min. | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Items | GF-1’s WFV1 Sensor | ZY3-02’s NAD Sensor | |
|---|---|---|---|
| Azimuth Angle Precision (°) | RMS | 0.00020 | 0.00000024 |
| Max. | 0.00065 | 0.00000085 | |
| Min. | 0.00000 | 0.00000000 | |
| Zenith Angle Precision (°) | RMS | 0.00032 | 0.000000028 |
| Max. | 0.00056 | 0.000000145 | |
| Min. | 0.00000 | 0.000000000 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, K.; Zhang, G.; Zhang, Q.; Li, D. Calculating Viewing Angles Pixel by Pixel in Optical Remote Sensing Satellite Imagery Using the Rational Function Model. Remote Sens. 2018, 10, 478. https://doi.org/10.3390/rs10030478
Xu K, Zhang G, Zhang Q, Li D. Calculating Viewing Angles Pixel by Pixel in Optical Remote Sensing Satellite Imagery Using the Rational Function Model. Remote Sensing. 2018; 10(3):478. https://doi.org/10.3390/rs10030478
Chicago/Turabian StyleXu, Kai, Guo Zhang, Qingjun Zhang, and Deren Li. 2018. "Calculating Viewing Angles Pixel by Pixel in Optical Remote Sensing Satellite Imagery Using the Rational Function Model" Remote Sensing 10, no. 3: 478. https://doi.org/10.3390/rs10030478
APA StyleXu, K., Zhang, G., Zhang, Q., & Li, D. (2018). Calculating Viewing Angles Pixel by Pixel in Optical Remote Sensing Satellite Imagery Using the Rational Function Model. Remote Sensing, 10(3), 478. https://doi.org/10.3390/rs10030478