Wind Gust Detection and Impact Prediction for Wind Turbines


Abstract
:1. Introduction
2. Materials and Methods
2.1. Definition of Spatial Gusts
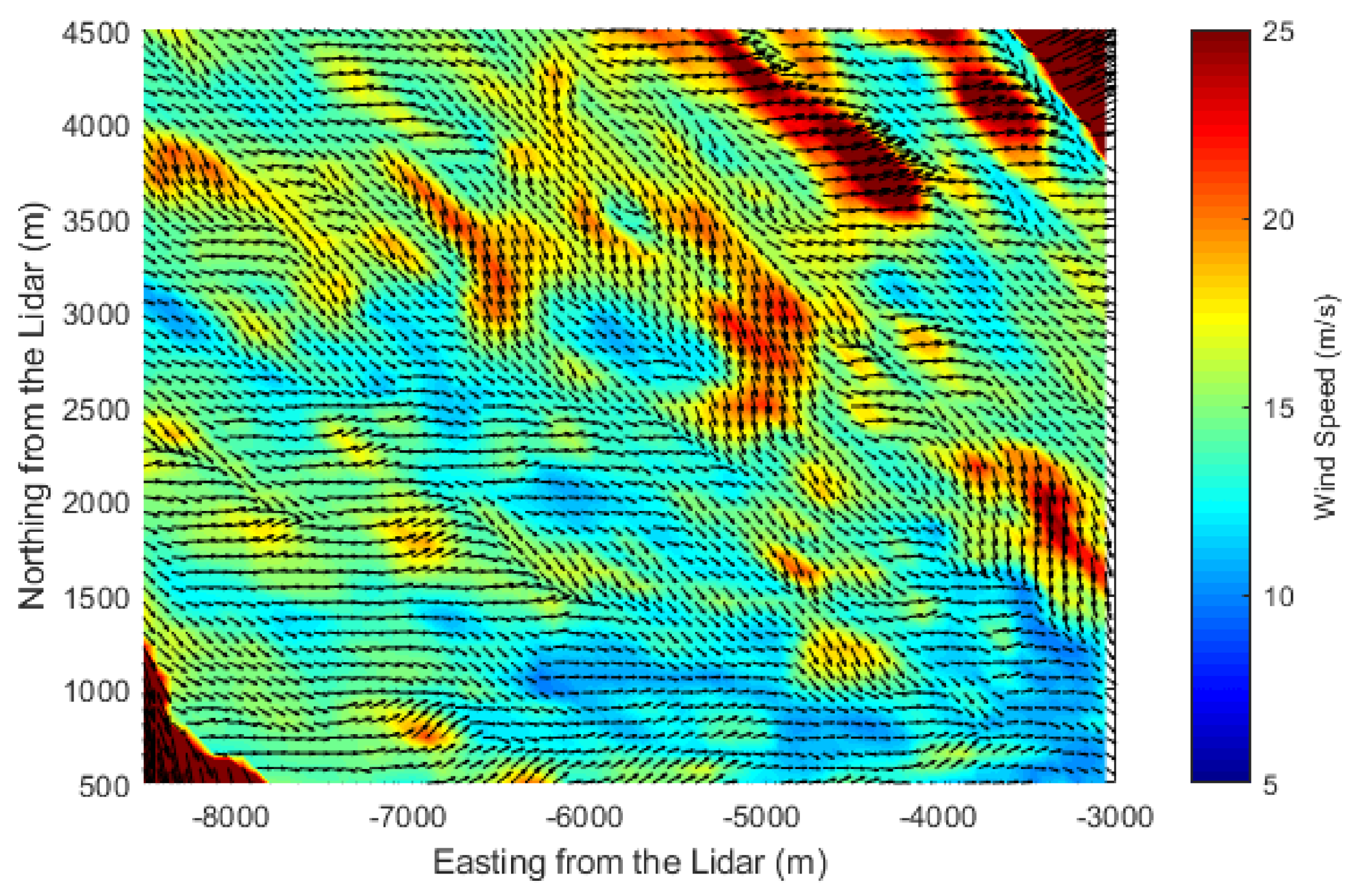
2.2. Data Information and Wind Field Retrieval
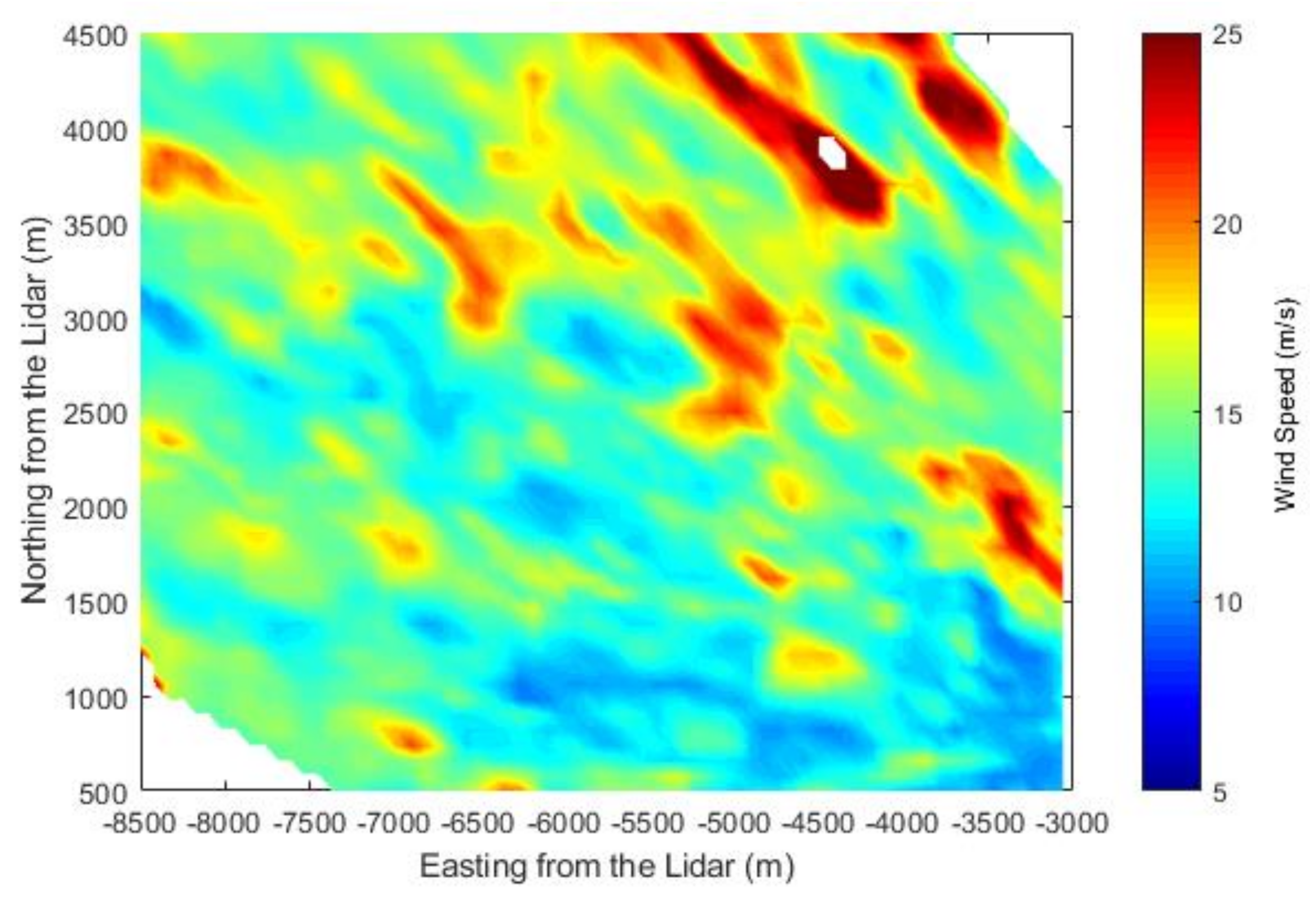
2.3. Data Preprocessing
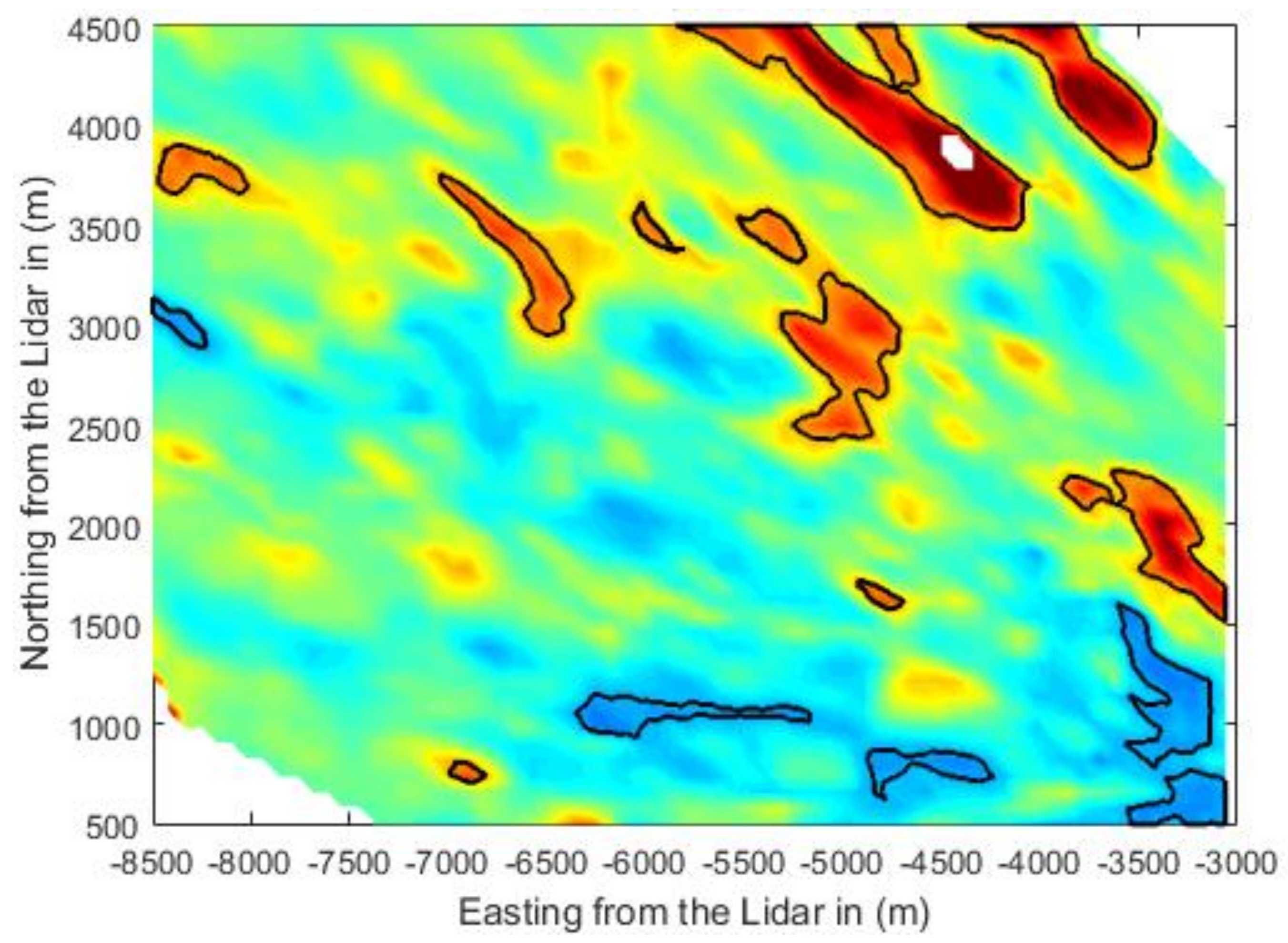
2.4. Detection of Gust Patches
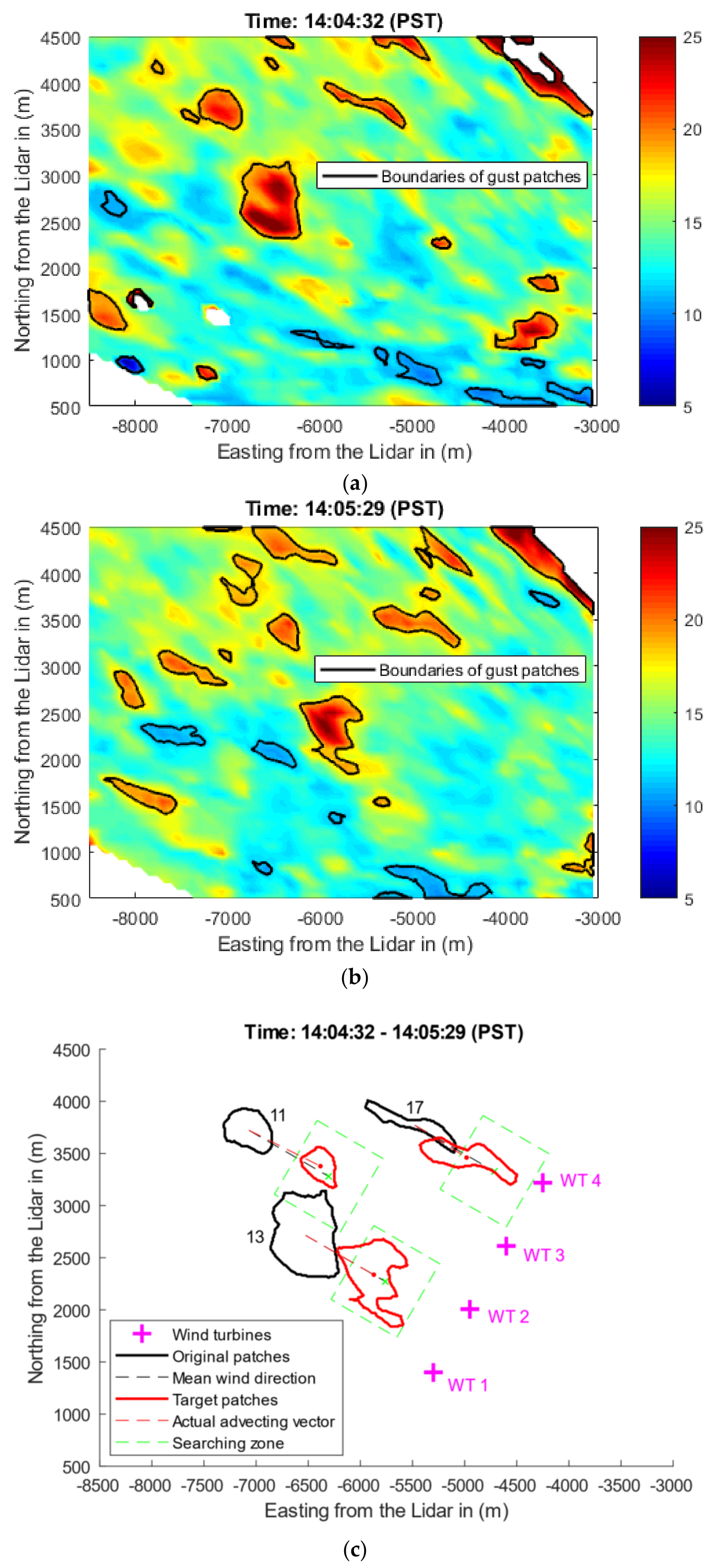
2.5. Tracking of Gust Patches
2.6. Prediction of Impact
2.6.1. Prediction of Impact Time
2.6.2. Prediction of the Probability of Impact Location
3. Results and Discussion
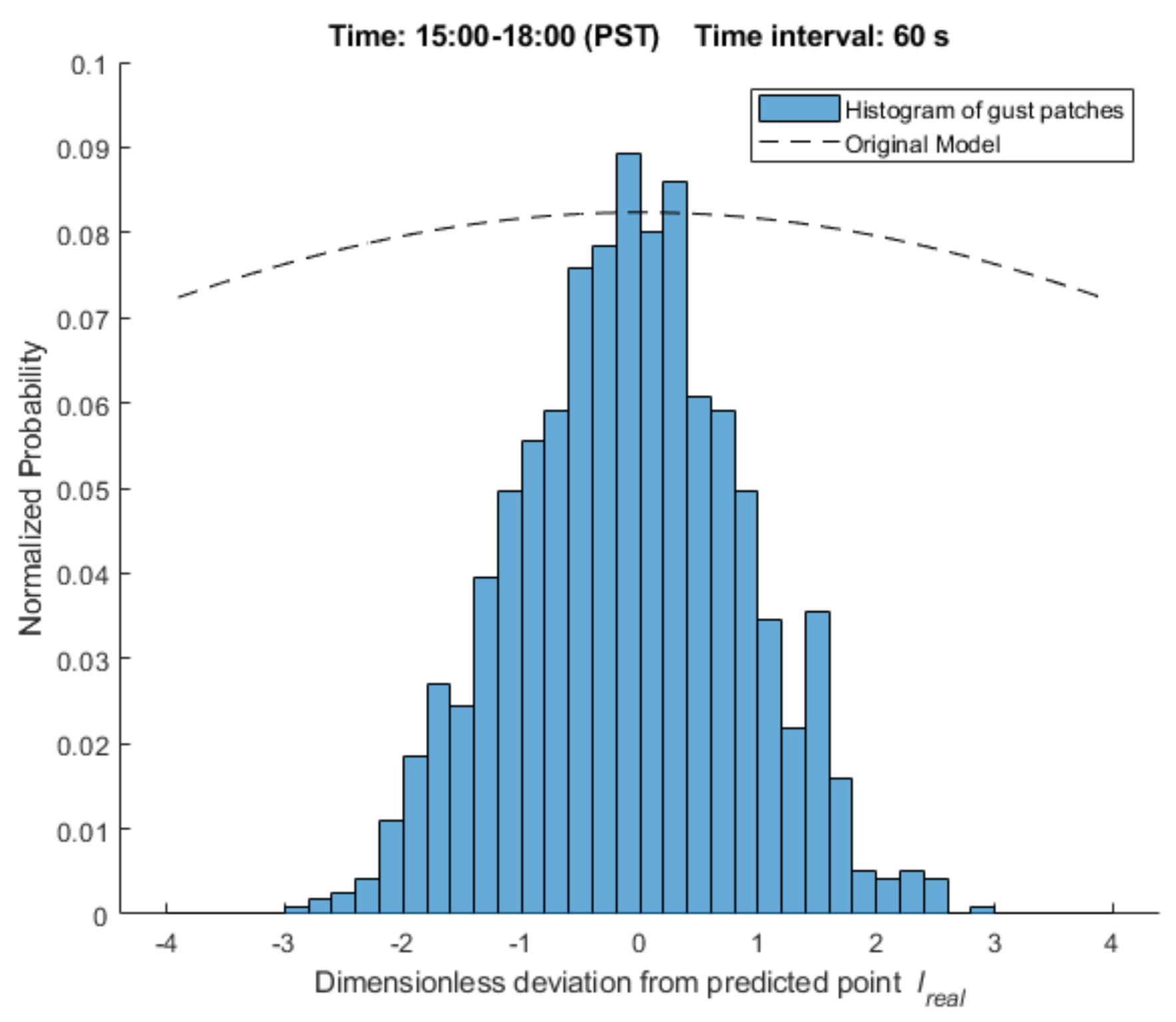
3.1. Preliminary Results
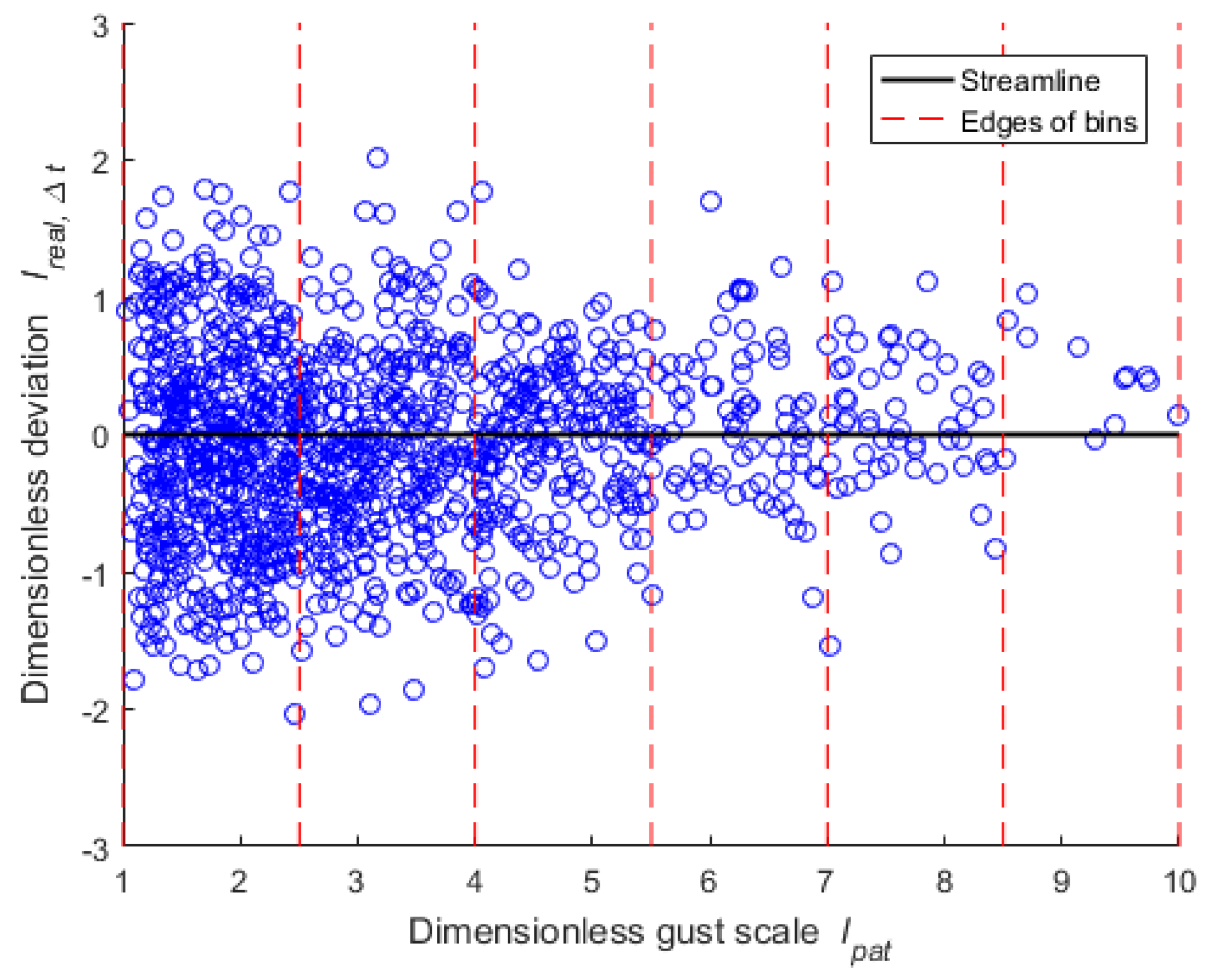
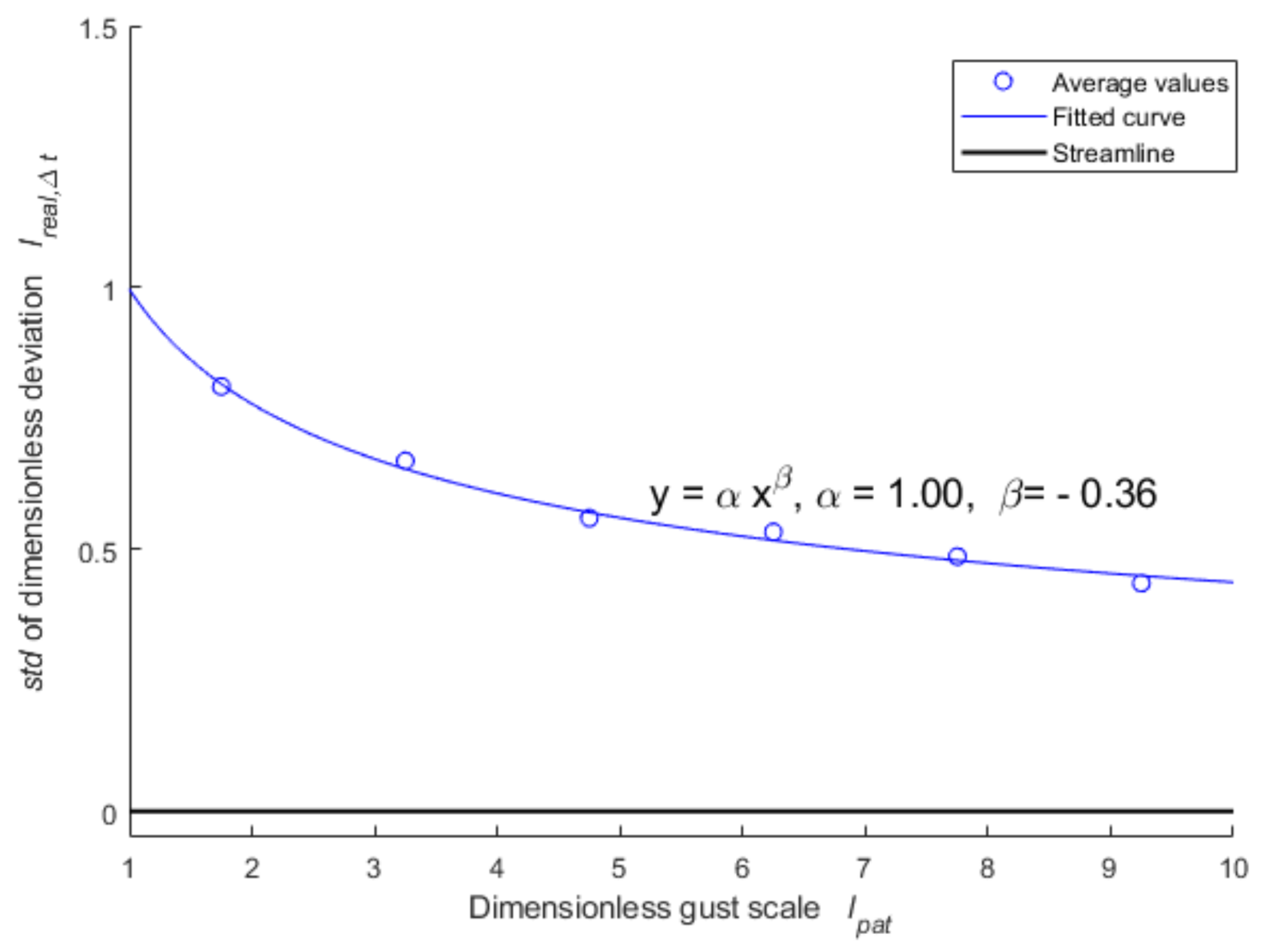
3.2. Size Dependency
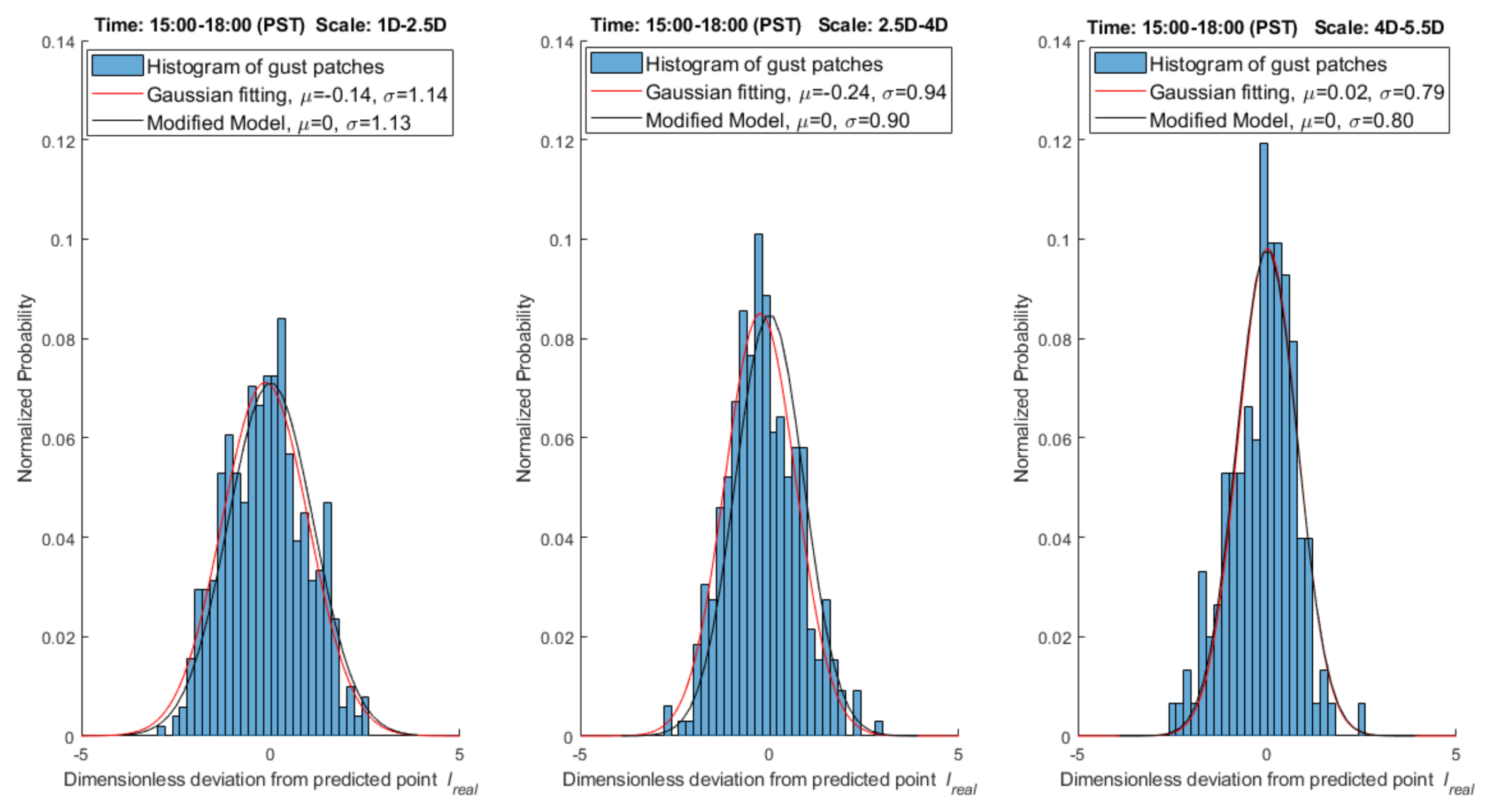
3.3. Improved Results Using the Modified Prediction Model
3.4. Application of the Modified Prediction Model
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schlipf, D.; Pao, L.Y.; Cheng, P.W. Comparison of feedforward and model predictive control of wind turbines using LIDAR. In Proceedings of the Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 3050–3055. [Google Scholar]
- Scholbrock, A.; Fleming, P.; Fingersh, L.; Wright, A.; Schlipf, D.; Haizmann, F.; Belen, F. Field testing LIDAR based feed-forward controls on the NREL controls advanced research turbine. In Proceedings of the 51th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]
- Kumar, A.A.; Bossanyi, E.A.; Scholbrock, A.K.; Fleming, P.; Boquet, M.; Krishnamurthy, R. Field Testing of LIDAR-Assisted Feedforward Control Algorithms for Improved Speed Control and Fatigue Load Reduction on a 600-kW Wind Turbine: Preprint. Presented at the EWEA 2015 Annual Event, Golden, CO, USA, 17–20 November 2015. [Google Scholar]
- Kristalny, M.; Madjidian, D. Decentralized feedforward control of wind farms: Prospects and open problems. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 3464–3469. [Google Scholar]
- International Electrotechnical Commission. International Standard, IEC 61400-1, Wind Turbines—Part 1: Design Requirements, 3rd ed.; International Electrotechnical Commission: Geneva, Switzerland, 2005. [Google Scholar]
- Branlard, E. Wind energy: On the statistics of gusts and their propagation through a wind farm. ECN-Wind-Memo-09-005Master’s Thesis, Energy research Centre of the Netherlands, Petten, The Netherlands, February 2009. [Google Scholar]
- Beljaars, A.C. The Measurement of Gustiness at Routine Wind Stations: A Review; World Meteorological Organization: Geneva, Switzerland, 1987. [Google Scholar]
- Kelley, N.; Shirazi, M.; Jager, D.; Wilde, S.; Adams, J.; Buhl, M.; Patton, E. Lamar Low-Level Jet Project Interim Report; Technical Paper No. NREL/TP-500-34593; National Renewable Energy Laboratory, National Wind Technology Center: Golden, CO, USA, 2004.
- Chamorro, L.P.; Lee, S.J.; Olsen, D.; Milliren, C.; Marr, J.; Arndt, R.E.A.; Sotiropoulos, F. Turbulence effects on a full-scale 2.5 MW horizontal-axis wind turbine under neutrally stratified conditions. Wind Energy 2015, 18, 339–349. [Google Scholar] [CrossRef]
- Mayor, S.D.; Lowe, J.P.; Mauzey, C.F. Two-component horizontal aerosol motion vectors in the atmospheric surface layer from a cross-correlation algorithm applied to scanning elastic backscatter lidar data. J. Atmos. Ocean. Technol. 2012, 29, 1585–1602. [Google Scholar] [CrossRef]
- Mayor, S.D.; Dérian, P.; Mauzey, C.F.; Hamada, M. Two-component wind fields from scanning aerosol lidar and motion estimation algorithms. In Proceedings of the SPIE Optical Engineering+ Applications, San Diego, CA, USA, 17 September 2013; p. 887208. [Google Scholar]
- Cherukuru, N.W.; Calhoun, R.; Krishnamurthy, R.; Benny, S.; Reuder, J.; Flügge, M. 2D VAR single Doppler lidar vector retrieval and its application in offshore wind energy. Energy Proced. 2017, 137, 497–504. [Google Scholar] [CrossRef]
- Amidror, I. Scattered data interpolation methods for electronic imaging systems: A survey. J. Electron. Imaging 2002, 11, 157–177. [Google Scholar] [CrossRef]
- Moore-Neighbor Tracing. Available online: http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/contour_tracing_Abeer_George_Ghuneim/moore.html (accessed on 9 October 2017).
- Batchelor, G.K. Diffusion in a field of homogeneous turbulence: II. The relative motion of particles. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1952; pp. 345–362. [Google Scholar]
- Petersen, W.B.; Catalano, J.A.; Chico, T.; Yuen, T.S. INPUFF-A Single Source Gaussian Puff Dispersion Algorithm: User’s Guide; US EPA: Research Triangle Park, NC, USA, 1984.
- Hanna, S.R.; Briggs, G.A.; Hosker, R.P., Jr. Handbook on Atmospheric Dispersion; Technical Information Center, U.S. Department of Energy: Washington, DC, USA, 1982.
- Sykes, R.I.; Parker, S.F.; Henn, D.S.; Cerasoli, C.P.; Santos, L.P. PC-SCIPUFF Version 1.2 PD Technical Documentation; ARAP Report No. 718; Titan Corporation, Titan Research & Technology Division, ARAP Group: Princeton, NJ, USA, 1998. [Google Scholar]
- Thykier-Nielsen, S.; Deme, S.; Mikkelsen, T. Description of the atmospheric dispersion module RIMPUFF. 1999. Available online: https://s3.amazonaws.com/academia.edu.documents/39632120/Description_of_the_atmospheric_dispersio20151103-1858-w1thfx.pdf?AWSAccessKeyId=AKIAIWOWYYGZ2Y53UL3A&Expires=1521966958&Signature=vnkIK16SU2hvkTa3L7PZWujwIB8%3D&response-content-disposition=inline%3B%20filename%3DDescription_of_the_atmospheric_dispersio.pdf (accessed on 25 March 2018).
- Leone, J.M., Jr.; Nasstrom, J.S.; Maddix, D.M.; Larson, D.J.; Sugiyama, G.; Ermak, D.L. Lagrangian Operational Dispersion Integrator (LODI) User’s Guide; Report UCRL-AM-212798; Lawrence Livermore National Laboratory: Livermore, CA, USA, 2005.
- Li, D.; Katul, G.G.; Zilitinkevich, S.S. Revisiting the turbulent Prandtl number in an idealized atmospheric surface layer. J. Atmos. Sci. 2015, 72, 2394–2410. [Google Scholar] [CrossRef]
- Kundu, P.K.; Cohen, I.M.; Dowling, D.W. Fluid Mechanics, 4th ed.; Academic Press: Burlington, MA, USA, 2008. [Google Scholar]
- Price, J.F. Lagrangian and Eulerian representations of fluid flow: Part I, kinematics and the equations of Motion; Clark Laboratory Woods Hole Oceanographic Institution: Woods Hole, MA, USA, 2005. [Google Scholar]
- Dosio, A.; Guerau de Arellano, J.V.; Holtslag, A.A.; Builtjes, P.J. Relating Eulerian and Lagrangian statistics for the turbulent dispersion in the atmospheric convective boundary layer. J. Atmos. Sci. 2005, 62, 1175–1191. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Settings |
|---|---|
| Wavelength | 1.6 m |
| Pulse energy | 2 mJ |
| Pulse repetition frequency | 750 Hz |
| Range resolution | 100 m |
| Blind zone | 436 m |
| Max range | 10 km |
| Patch Number | #11 | #13 | #17 |
|---|---|---|---|
| Impact wind turbine | Turbine 3 | Turbine 2 | Turbine 4 |
| Predicted arrival time | 183.03 s | 116.37 s | 92.9 s |
| Real arrival time | - | ~119.54 s | ~119.54 s |
| Spanwise distance between predicted arrival position and wind turbine of impact | 285.2 m (to its left) | 153.7 m (to its left) | 144.9 m (to its left) |
| Spanwise distance between real arrival position and wind turbine of impact | - | 106.16 m (to its left) | 87.48 m (to its left) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, K.; Cherukuru, N.; Sun, X.; Calhoun, R. Wind Gust Detection and Impact Prediction for Wind Turbines. Remote Sens. 2018, 10, 514. https://doi.org/10.3390/rs10040514
Zhou K, Cherukuru N, Sun X, Calhoun R. Wind Gust Detection and Impact Prediction for Wind Turbines. Remote Sensing. 2018; 10(4):514. https://doi.org/10.3390/rs10040514
Chicago/Turabian StyleZhou, Kai, Nihanth Cherukuru, Xiaoyu Sun, and Ronald Calhoun. 2018. "Wind Gust Detection and Impact Prediction for Wind Turbines" Remote Sensing 10, no. 4: 514. https://doi.org/10.3390/rs10040514
APA StyleZhou, K., Cherukuru, N., Sun, X., & Calhoun, R. (2018). Wind Gust Detection and Impact Prediction for Wind Turbines. Remote Sensing, 10(4), 514. https://doi.org/10.3390/rs10040514