1. Introduction
Updated information about forest resources is important on different scales ranging from the individual tree up to regional, national and global levels. Remote sensing has played a key role in the past decades’ development of modern forest inventory methods. Optical sensors on airborne and spaceborne platforms are being used for mapping of forest resources, and, in the boreal forest in the Nordic countries, a majority of operational forest inventories are today carried out using a combination of aerial imagery and data from airborne laser scanning [
1]. In this inventory method, the relationship between remotely sensed data and field measured properties is modeled for area units [
2]. Complete coverage forest inventory data are produced by utilizing the remotely sensed data and the established relationship with biophysical forest characteristics from the field measurements. A requirement in this approach is that field reference data are available. At a regional and national scale, similar methods have been used with satellite imagery [
3]. Field reference data are also required and used in this case.
Manual field registrations including tree positioning, as required in many forest inventory methods, can be time consuming (cf. [
4]), and several studies have investigated how remote sensing technologies can aid or replace manual work in the field. Liang et al. [
5] reviewed research aiming at using terrestrial laser scanner (TLS) in forest inventories. TLS produces three-dimensional data in the form of dense point clouds, and by processing and analyzing these point clouds several biophysical characteristics related to the forest and the trees can be extracted. Methods have been developed for automatic identification of tree stems and extraction of stem diameters [
6,
7,
8,
9,
10,
11]. Others have developed methods for more detailed reconstruction of the tree stem and branch structure [
12]. It has been suggested that the field reference data that are used in remote sensing based forest inventories can be collected using TLS. Field reference data for forest inventories typically consist of measurements on field plots of size 200–400 m
2. Several challenges must be overcome to effectively use TLS for registrations on field plots, and many of them are discussed in the review studies by Liang et al. [
5] and Dassot et al. [
13]. Scanning from a fixed position on a field plot will for example lead to occluded areas, or areas where the point cloud data are sparse or missing due to obstructions between the trees and the scanner position. The presence of such occluded areas in the dataset can be reduced by scanning from multiple positions. This is however time consuming, and some studies investigate methods to correct for the missing trees that will be obstructed from the view of the scanner [
14]. Reducing the chance of having occluded areas in the data from a field plot can also be achieved by using mobile laser scanning (MLS). Rather than scanning from fixed positions, such systems will continuously record data while the instrument is carried through the forest field plot. The instrument can be carried by a human [
8,
15,
16], or mounted on a vehicle [
17,
18].
Oveland et al. [
8] have developed and described a MLS-based system for acquisition of single tree positions and diameters at forest field plots. This system used data from an airborne laser scanning to determine the ground level. The dependence on additional external data limited the use of the system. It was therefore desirable to develop a system that could be used without the need for additional data. The system described in the current study solves this by including an additional scanning device, and therefore does not depend on additional data. In the following, this system will be referred to as the backpack laser scanner (BPLS). The BPLS system has similar laser instrumentation as the Leica Pegasus backpack tested by Masiero et al. [
19].
Previous studies on laser scanner based systems for mapping of trees are briefly described in the following. Pierzchala et al. [
20] used an unmanned vehicle-based MLS system and simultaneous localization and mapping (SLAM) to map trees and estimate diameter at breast height (DBH). A root mean square error (RMSE) of 2.4 cm was obtained when estimating the DBH. Based on a novel method for tree stem identification, Heinzel and Huber [
21] used TLS to estimate DBH, and obtained an RMSE of 2.9 cm. In a study by Bauwens et al. [
15], three systems based on TLS and MLS were compared on trees with DBH > 10 cm. For DBH estimation, an RMSE of 1.1 cm was obtained using the MLS-based system. When using TLS for DBH estimation an RMSE of 3.7 cm was obtained for a single scan and 1.3 cm was reported for multiple scans. For a single TLS scan, 78% of the trees were detected. Forsman et al. [
17] used a vehicle-mounted MLS system to estimate DBH. Three-dimensional data were obtained by the combination of a two-dimensional laser scanner and the movement of the vehicle. For the trees within 10 m from the vehicle, an RMSE of 3.7 cm was obtained for the estimation of DBH and with a stem detection accuracy variation from 63% to 78%. Liang et al. [
22] demonstrated a BPLS system based on a TLS laser scanner in combination with an inertial measurement unit (IMU) and a global navigation satellite system (GNSS) receiver. A tree stem detection accuracy of 82.6% and an RMSE of 5.1 cm on estimation of DBH were reported in that study. Liang et al. [
23] proposed a method using separate processing of multiple TLS scans on a forest field plot. They obtained a stem detection accuracy of 95.3% and an RMSE for the DBH estimation in the range from 0.9 cm to 1.9 cm. Corresponding results for a single scan setup were a detection rate of 73.4% and an RMSE for the DHB in the range from 0.7 cm to 2.4 cm. In a study comparing different TLS scanner setups and detection algorithms, Pueschel et al. [
24] estimated the DBH with an RMSE of 0.7–1.2 cm when using multiple TLS scans. For single TLS scans, the RMSE varied from 1.4 cm to 2.4 cm.
Field plots used in remote sensing based forest inventories are required to be accurately positioned. This is typically achieved in manual field work by using survey-grade GNSS receivers. TLS and MLS instruments which record laser data in a local coordinate system must be related to a global coordinate reference system to be used in the inventory process. The three-dimensional point cloud obtained from the laser instruments are usually rotated and translated from the local coordinate system to a global coordinate reference system using targets. Accurate positioning of targets within forests using GNSS can be challenging, and post-processing is often used [
25]. The difficulties are poor sky visibility due to the tree canopy. The trees interrupt the GNSS signals, resulting in poor conditions for GNSS measurements. The movement of a MLS system through the forest means however that favorable conditions for GNSS signals are likely to occur at some locations, where the canopy is less dense or absent. This can be utilized, and in combination with information about the orientations and movements, it can be used to retain the current position in areas with poorer GNSS conditions. Use of IMU in combination with GNSS in forests was applied, e.g., by Kaartinen et al. [
26], Forsman et al. [
17] and Oveland et al. [
8], to handle information about the orientations and movements. In the current study, tightly coupled GNSS-IMU post processing software called TerraPos [
27] was used to obtain the position throughout the data collections. Additionally, iterative closest point (ICP) algorithm were used to improve the position accuracy within the plots. TerraPos is a multi-purpose software for aided inertial navigation. In addition to standard ambiguity fixed differential GNSS aiding, a wide range of aiding sources and sensors may be used. Typical aiding examples are wheel-based and visual odometry, magnetometers, slave GNSS antenna, velocity constraints and digital elevation model. TerraPos is usually applied to positioning of planes, ships and cars and not commonly used in an MLS system in the forest.
The aim of the current study was to describe a BPLS system for collection of single tree data on field plots in boreal forest. The target was to obtain DBH and tree position in a global reference frame as efficient as possible. The BPLS system used a novel method to extract the DBH without losing precision due to poor GNSS conditions and to extract the tree position in a global reference frame using a GNSS aided inertial navigation system (INS) in combination with a two-step iterative closest point approach. Data obtained with the BPLS system were compared to similar data from two existing scanning systems, namely the handheld laser scanner (HLS) GeoSlam ZEB1 (GeoSlam, Ruddington Fields Business Park, Ruddington, Nottinghamshire, NG11 6JS, United Kingdom) and the TLS Faro Focus 3D x130 (Faro, 250 Technology Park Lake Mary, FL 32746, USA). Data from all three systems were validated against manual field measurements.
3. Results
The TLS had a built-in magnetometer that was used to orient the scanner. The magnetometer readings were evaluated by rotating the laser scanner result until a best possible fit to the reference tree positions was achieved.
Table 3 summarizes the result.
The average heading error was −0.8° with a 6.1° standard deviation. Additionally, the tree positions were calculated based on the magnetometer readings and with the corrections found in
Table 3. The result is presented in
Table 4.
The evaluation of the magnetometer accuracy showed that the tree position can be significantly better by improving the orientation method. The final result based on the magnetometer readings are presented in
Table 5. The DBH estimation for the TLS method had two major outliers. By removing these two outliers, the mean difference was 1.5 cm, the RMSE 3.4 cm and the RMSE% 15.5.
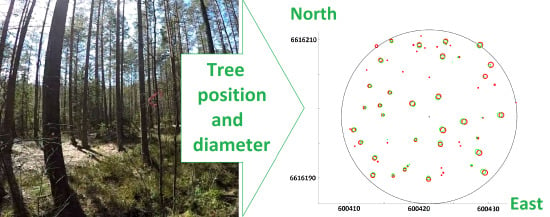
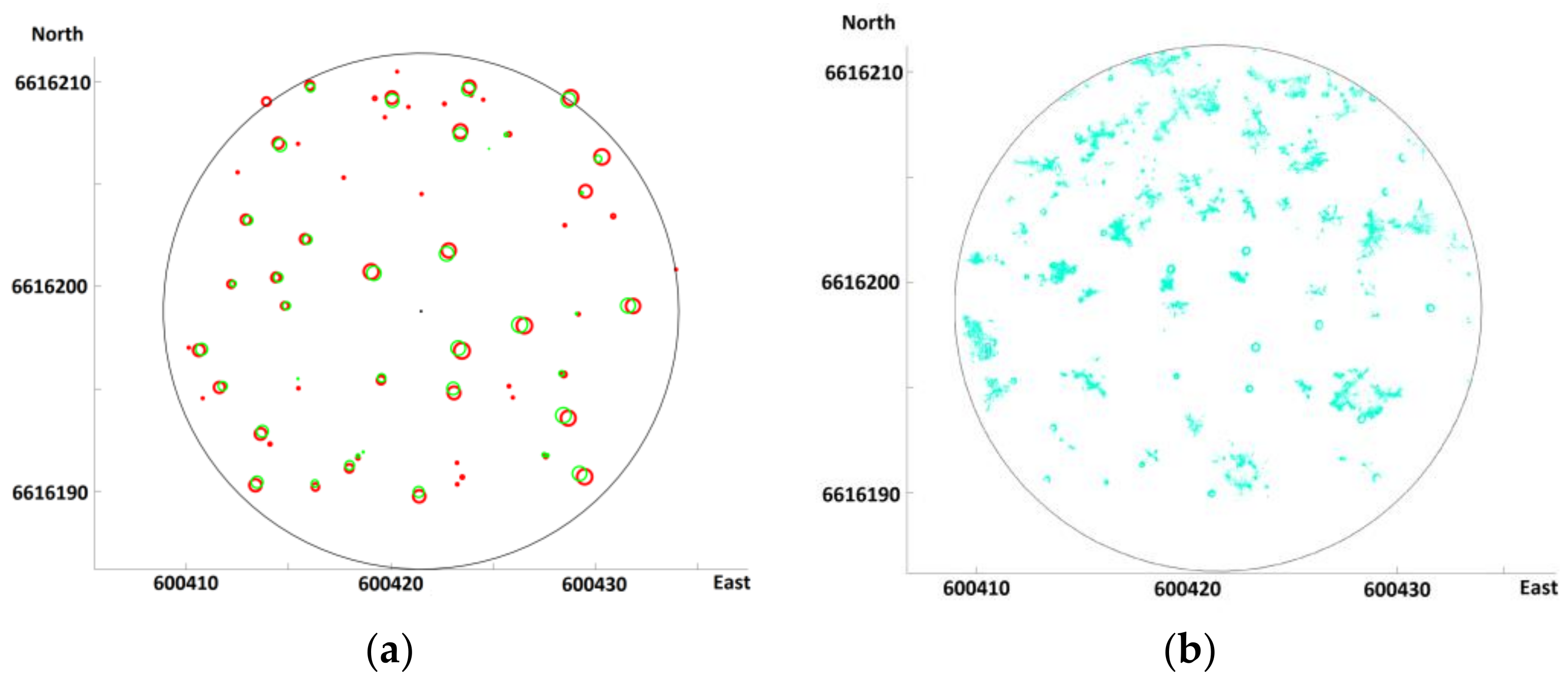
The results obtained from the HLS revealed that small trees were difficult to detect. To illustrate this, one of the plot with a high number of small trees was used as an example. In
Figure 3a, the HLS tree data are plotted in green together with the reference trees in red.
Figure 3b shows the laser point in the region 1.0 m to 1.5 m above ground level. By comparing
Figure 3a,b, it seems that the missing trees occurred where there were no half or full donut shaped pattern in the laser data.
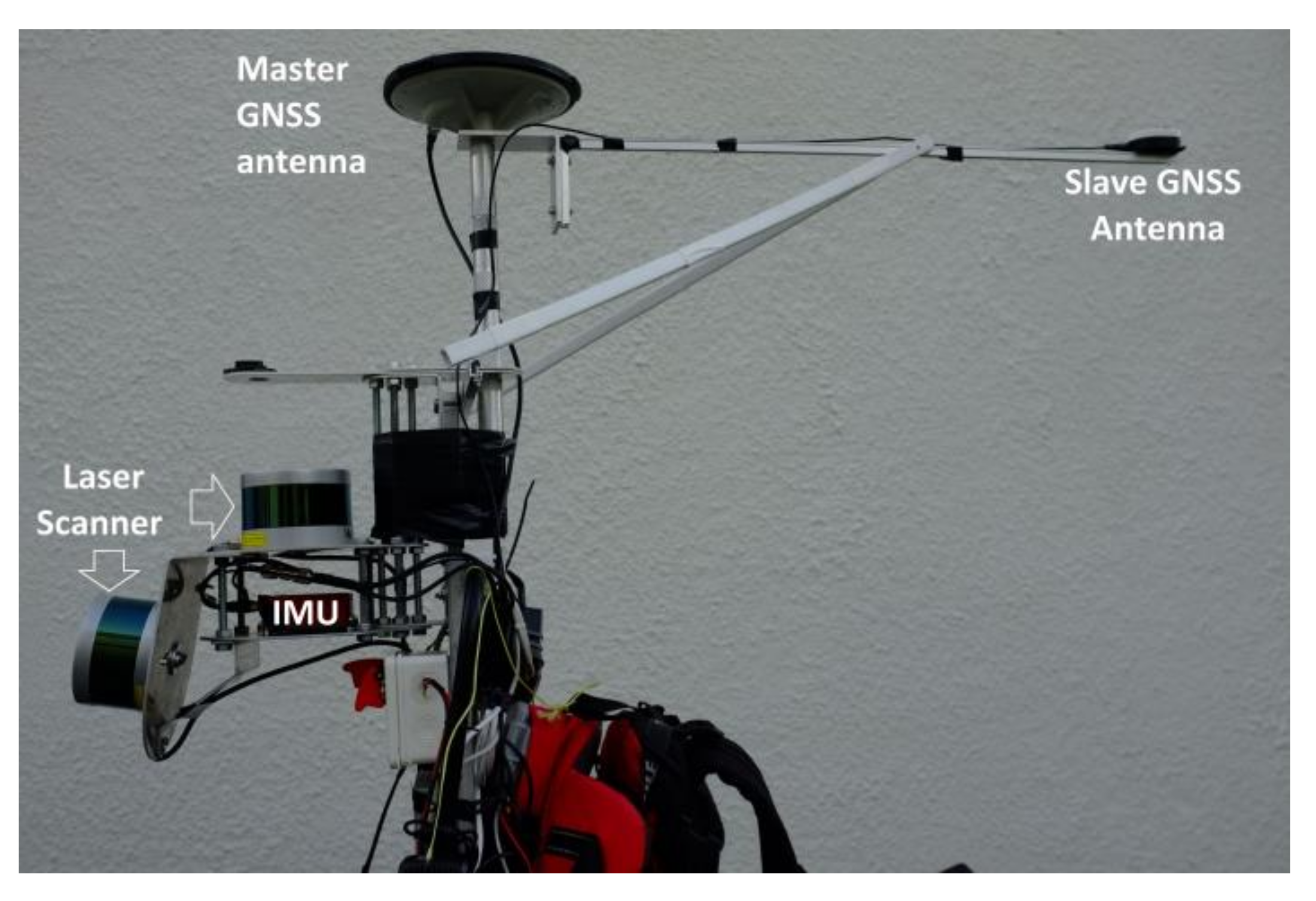
An important factor for the BPLS method was the calculated pose accuracy. The estimated standard deviation for the position was better than 0.5 m. For roll and pitch it was better than 0.13° and for heading it was better than 0.9°. The combined master and slave GNSS antenna heading system had only 134 epochs with valid observations. The heading system was very useful during system orientation initialization. Inside the forest the position dilution of precision (PDOP) varied from 1.1 to 17. Typically, TerraPos was able to create fixed solutions when the PDOP dropped down and float solutions when it rose. Approximately 60% of the epochs had a fixed solution, but in the densest forest there were up to 18 min in-between two fixed solutions. Due to the tightly coupled solution, there were continually pose observations for the entire mission. The main result from the different methods is presented in
Table 5.
The results presented in
Table 5 show that up to 37.9% of the trees were not found.
Table 6 presents the average DBH for the omission trees and the number of trees with DBH larger and smaller than 10 cm.
4. Discussion
The coordinate for the plot center point was determined using GNSS measurements in relatively clear sky locations and measured using a total station. These established center points were also used to position the HLS and TLS data. This gave a correlation between these measurement methods and the reference data while the BPLS data were independent. Thus, the resulting uncertainties in the center point coordinates would not affect the HLS or TLS data positions statistics but would give a false position offset for the BPLS result. We assume that there were no major errors in the center point position estimation and that the errors were independent of each other. The errors presented in
Table 2 are summarized:
The center point coordinates were estimated to have a standard deviation of 3.2 cm. This was substantially less than the achieved standard deviation for all the laser scanning methods.
The caliper measurements of the DBH were conducted with one measurement in a random heading direction. Since tree stems can be ellipse-shaped, DBH measured from a different direction might deviate from this reference measurement. This can be viewed as a small uncertainty in the reference measurements, and might have an influence on the achieved DBH accuracy. The uncertainties could have been reduced by using an additional perpendicular caliper measurement or using diameter tape to measure the girth.
As shown in
Figure 3a, the HLS had difficulties to detect smaller trees and this confirmed the results underlined by Bauwens et al. [
15] and Ryding et al. [
16]. In the situation where the HLS data formed a half or full donut shape pattern, the tree detection technique worked well (
Figure 3b). Other shapes such as filled circle and odd shapes did not succeed at the same level. One reason for the blurry shapes describing the smaller trees might be the point cloud precision. Another reason might be a change in the stem inclination due to wind conditions [
21]. All laser scanners had problems to detect the smaller trees. Additionally, the TLS had problems with occluded areas, since the scanning was performed only from the center. The average tree density in our study area was 969 stems/ha, but also the high number of small trees that created a complex understory vegetation contributed to the occluded areas. Both the HLS and BPLS were carried around in the plot. This reduced the occluded areas to a minimum, but there will always be some occluded areas left due to branches, leaves and bushes. The BPLS method found the largest number of trees, also when it comes to the smallest trees.
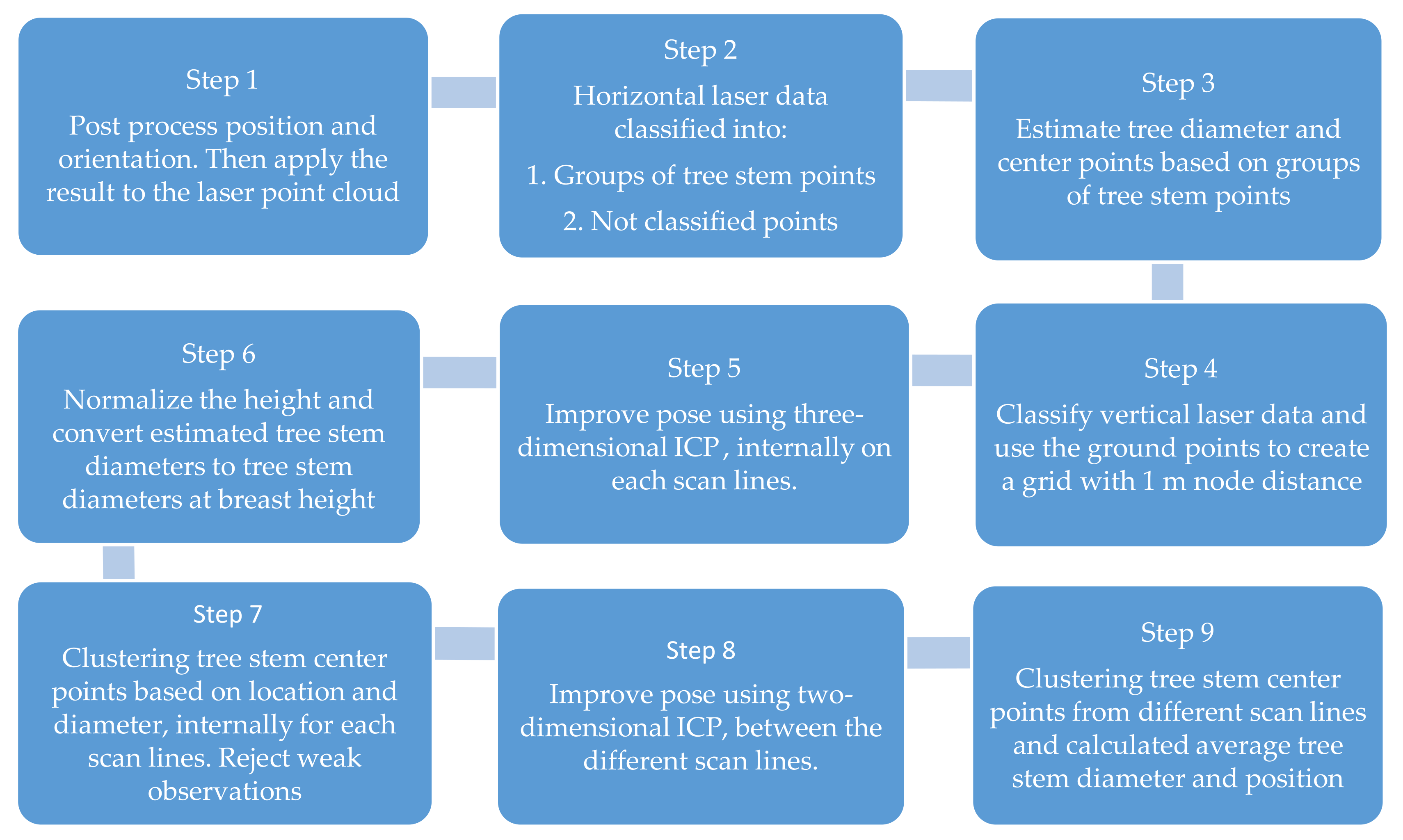
For the BPLS method, it was important to capture all the potential GNSS satellites in the forest. This was important to ensure the best possible position in the global coordinate frame. The GNSS equipment used in the BPLS could not receive signals from the GNSS created by the European Union called Galileo. The base station was able to pick up some signals from the Chinese BeiDou navigation satellite system, but these signals were not present in the BPLS GNSS data. BeiDou and Galileo together consist of 15–20 satellites. Under good GNSS observation conditions, it might have been possible to track 7–10 more satellites. Inside the forest, this could give a huge difference because just one more observed satellite could create a fix solution rather than a float solution. Signals from both Galileo and BeiDou could have improved the position accuracy. The DBH calculation for the BPLS was not vulnerable to poor GNSS condition, but the processing was smoother if the position standard deviation was below 0.5 m. The main reason for the low sensitivity to poor GNSS was the INS and the splitting of the laser data. The proposed method splits the laser data into small time frames, decided by the scan rotation of the horizontal VLP 16 laser scanner. For each 0.1 s, a new point cloud was established. This point cloud was then used to estimate the tree center point and stem diameter. ICP operations were applied to the result and ensured a homogenous localization of each tree with the corresponding attributes. This method ensured that errors from GNSS and IMU are negligible to the stem diameter and DBH calculation. This assumption was acceptable since the pose error can be considered as stable within such time interval. A side effect was the high number of point clouds, where each of them gave diameter calculation for the observed trees. The result was many diameter calculations that were used to estimate the final DBH for each tree. This had a positive impact on the DBH accuracy.
Each method used different workflows with different working tasks involved. The data capture time would mainly vary according to the number of tasks. The most time consuming method was the HLS method. This technique required static GNSS, position of the plot center, spheres position measurements and laser scanning. The total time consumption was estimated as 74 min. Some of the working tasks can be done in parallel to reduce the time consumption. However, this was not considered in this study.
Table 7 summarizes the time consumption from this and previous studies. The overview shows that the BPLS was the method with the fewest working tasks, and therefore, the fastest method with an estimated time consumption of 16 min.
The TLS was aligned with a built-in magnetometer. The precision of the final tree coordinates was heavily influenced by the quality of the built-in magnetometer. If the registration of the center point positions was carried out using a total station, it would not be very time consuming to put up spheres to align the scanner and thus obtain a much better precision. On the other hand, the TLS data were very homogenous in the sense that the relative positions within each plot were consistent. Thus, the highly accurate tree positions of the detected trees are a really good starting point as input for matching the data with airborne laser data [
36], to improve position accuracy.
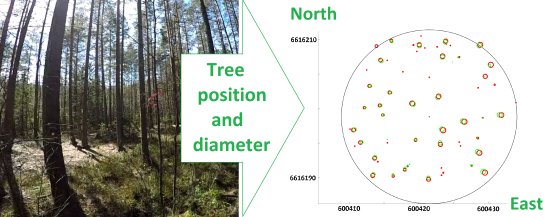
The main data capture was performed in May 2017, before the leaves had emerged. The BPLS data collection was delayed due to technical problems and was performed in early July 2017. The leaves had emerged, which might have had an effect on the tree stem visibility and the number of false trees. An example from plot number three is shown in
Figure 4a,b. The tree growth between the two points in time were assumed to have a minor effect on the DBH.
The data capture with the BPLS was carried out by walking across each plot in straight lines forming a star-shaped pattern. The number of lines decided the maximum possible distance to the potential trees inside the plot. In this study, we used three scan lines and this gave a theoretical minimum detectable DBH of 4.2 cm for the BPLS. In the reference data, the minimum DBH was set to 4.0 cm. This means that there are small areas at the outer edge where we were unable to detect the smallest trees. In this study, the total area was 0.4% of a plot and was assumed to be at an acceptable level.
For a long time, studies have reported large commission errors [
37] when laser based methods have been used. More recent studies confirm these observations [
15,
22]. Reported commission errors vary from 0% to 31% [
15]. The result in our study showed that the number of false trees—i.e., commission errors—were up to 9.9% of the total number of field reference trees. Most of the false trees had a DBH less than 10 cm. In the reference data, all trees with a DBH larger than 4 cm were measured. No trees with a smaller DBH than 4 cm were measured. Since the measurement methods have uncertainties, it is possible that some of the trees which were estimated to have a larger DBH than 4 cm actually were trees with DBH smaller than 4 cm. In such situations, the trees would be registered as false trees. In the BPLS method, the laser point clouds were segmented into tree points, ground points and none classified points. The segmentation was based on a rule based approach. This could in further studies be changed to a machine learning approach. This has the potential to improve the tree segmentation and reduce the commission errors.
The obtained results for the DBH estimation are compared to results in other recent studies in
Table 8. All TLS methods in
Table 8 were performed with one single scan in the center of the plot. Our TLS result had a lower accuracy compared to similar studies [
15,
23,
24]. Potential explanations for this might be the tree density and the understory vegetation and how this affect the DBH calculation. Other elements that might affect the DBH extraction are the ranging method in the laser scanner, the scanner characteristics, scan settings and data processing [
24]. The TLS method in our study had two large outliers. An outlier search might have detected these outliers and thus reduced the RMSE and RMSE% to 3.4 cm and 15.5, respectively.
In general, the TLS, HLS and BPLS result in this study have larger RMSE and RMSE% values compared to other studies. One advantage of our study was that the different methods have the same preconditions regarding stem density, tree species, stem sizes, understory vegetation, reference data and plot size. This makes it easier to compare the different methods used in the study. On the other hand, the DBH extraction algorithm for the TLS and HLS method might vary from the state-of-the-art DBH. In this study, the BPLS method achieved the best accuracy with the smallest level of omissions, however the largest level of commissions was also obtained.
BPLS seems to be a very promising method in terms of time consumption for data collection. Thus, BPLS might have great potential as a cost-effective data source in forest inventory. Moreover, a final decision about the most profitable source of data for forest inventory should not be based on purely technical considerations, such as reported accuracies. It is of fundamental importance for management that the costs of acquiring the information are balanced against the utility of the information for decision-making. Thus, we recommend that future research focus on this trade-off using for example so-called cost-plus-loss analyses, which may establish a link between errors associated with the inventory and expected losses as a result of future incorrect decisions due to the errors in the data.

 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}