Optimization of OpenStreetMap Building Footprints Based on Semantic Information of Oblique UAV Images




Abstract
:1. Introduction
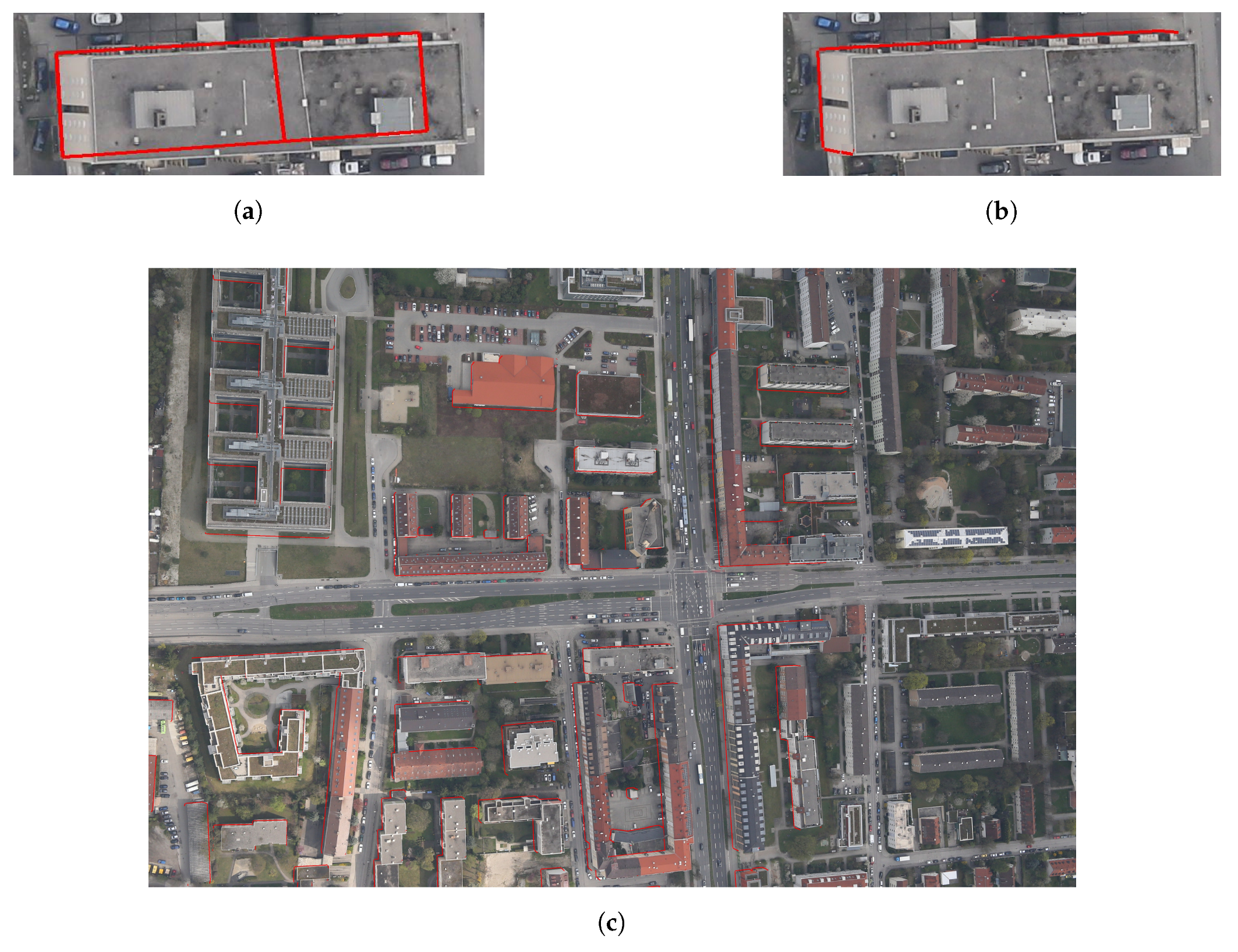
- The footprints addressed in previous research are the roof areas with overhangs. In contrast, our method is able to detect the real building footprints excluding roof overhangs, i.e., the edges where the building façades meet the ground.
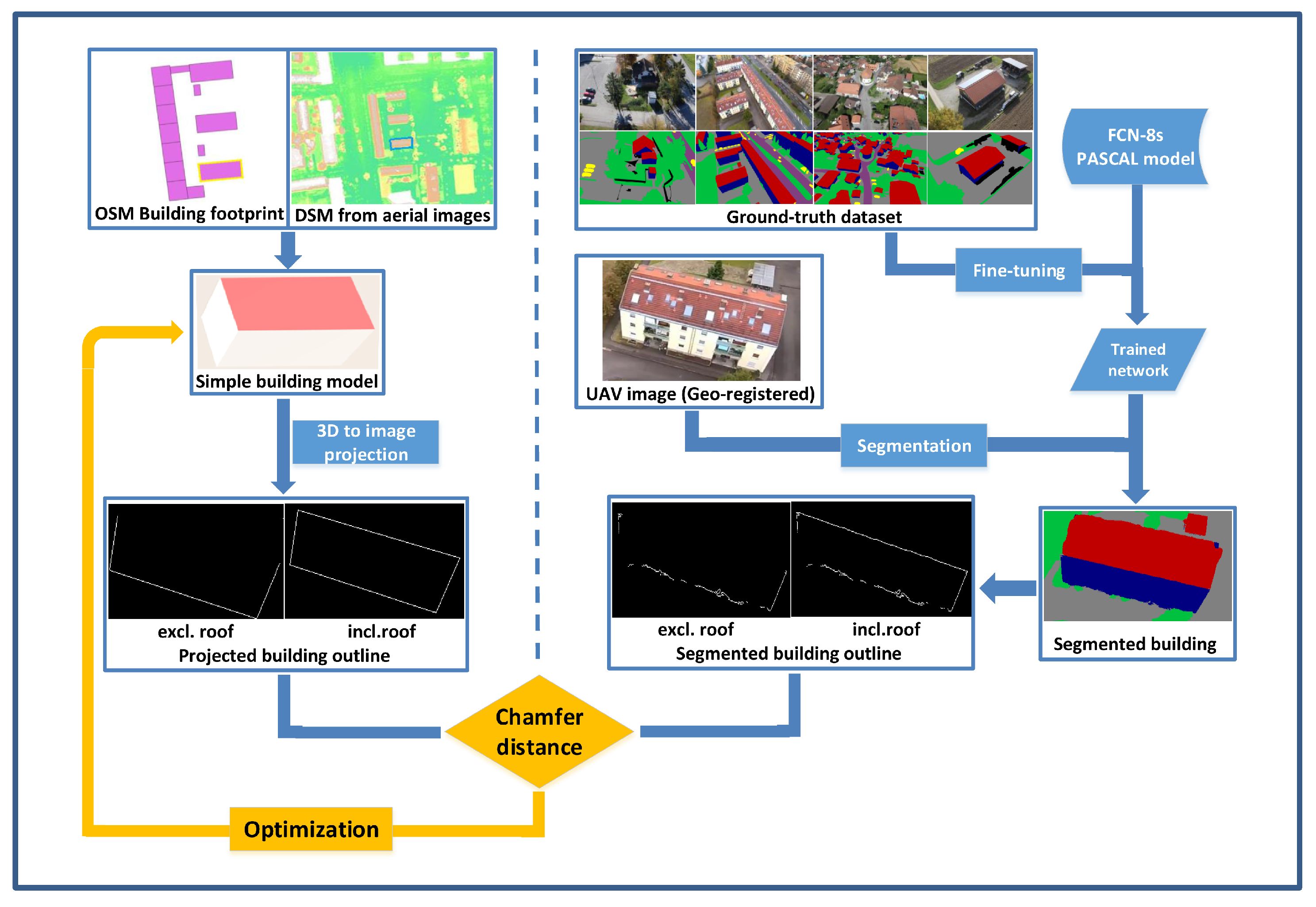
- Instead of directly detecting buildings in 3D space, we introduce an optimization scheme using the image evidence from pixel-wise segmentation as a constraint, i.e., the image projection of the building model is encouraged to be identical to the building areas detected via pixel-wise image segmentation.
- Our method is able to refine simultaneously the building footprint and its height.
2. Related Work
3. Methodology
3.1. Geo-Registration of UAV Images
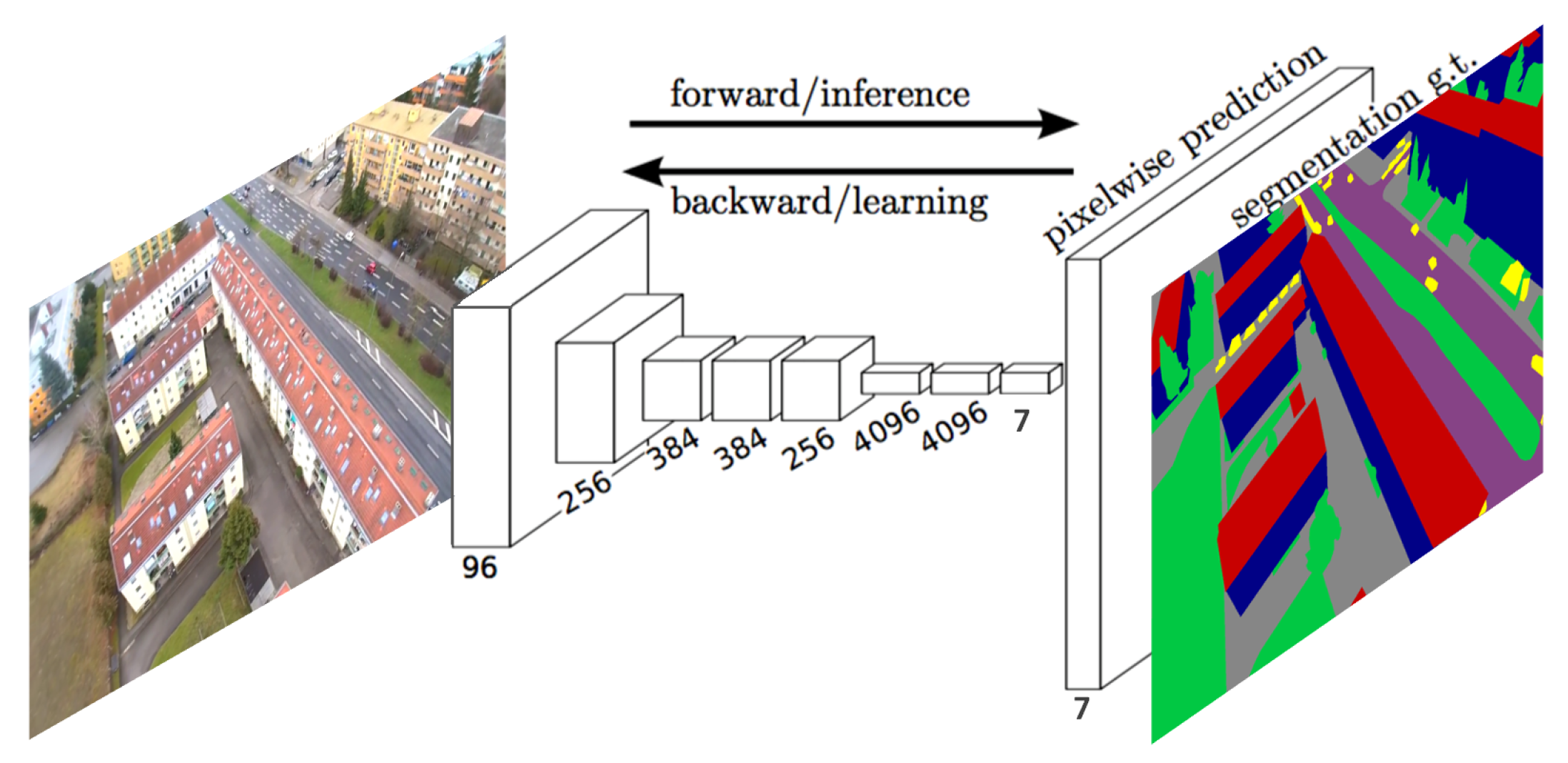
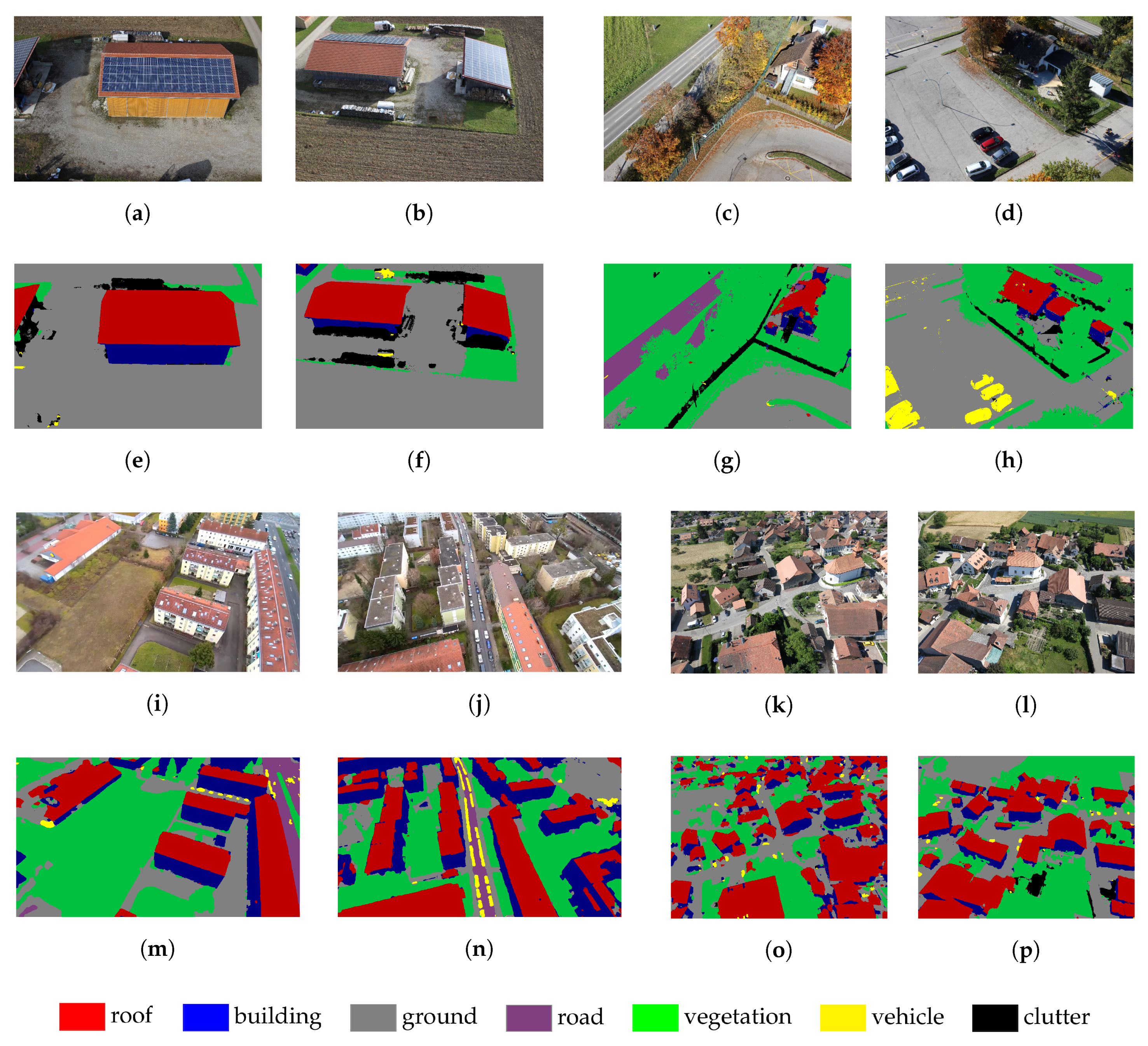
3.2. Semantic Segmentation of UAV Images
3.3. Optimization of Building Footprints
3.4. Application Conditions
4. Experiments
4.1. Data Description
4.1.1. Image Data
4.1.2. OSM Data
4.1.3. Reference Data
4.2. Geo-Registration of UAV Images
4.3. Semantic Image Segmentation Using CRFasRNN
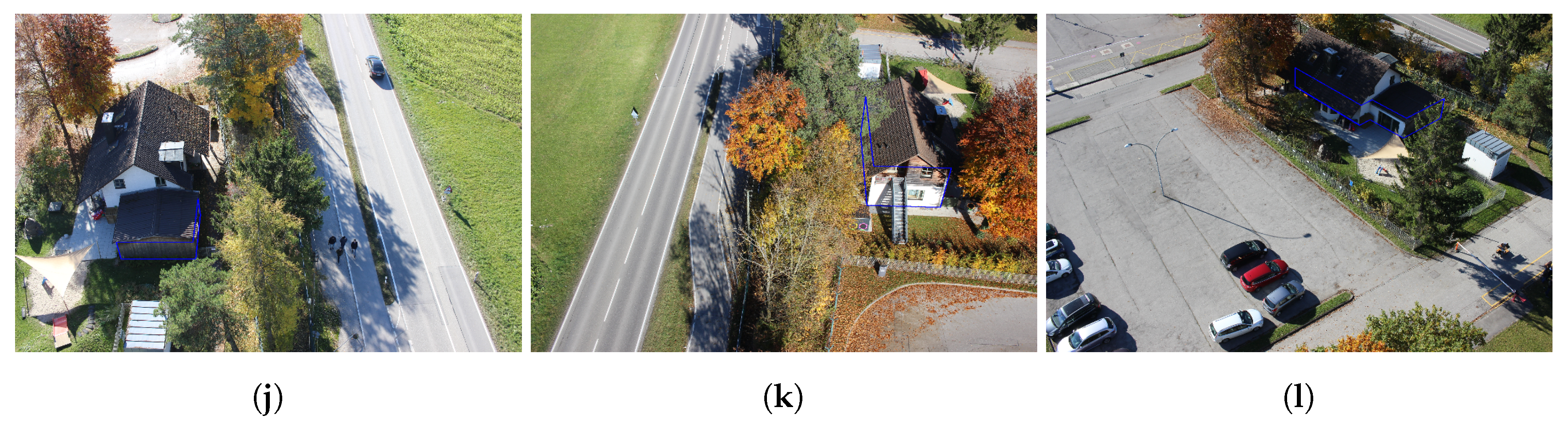
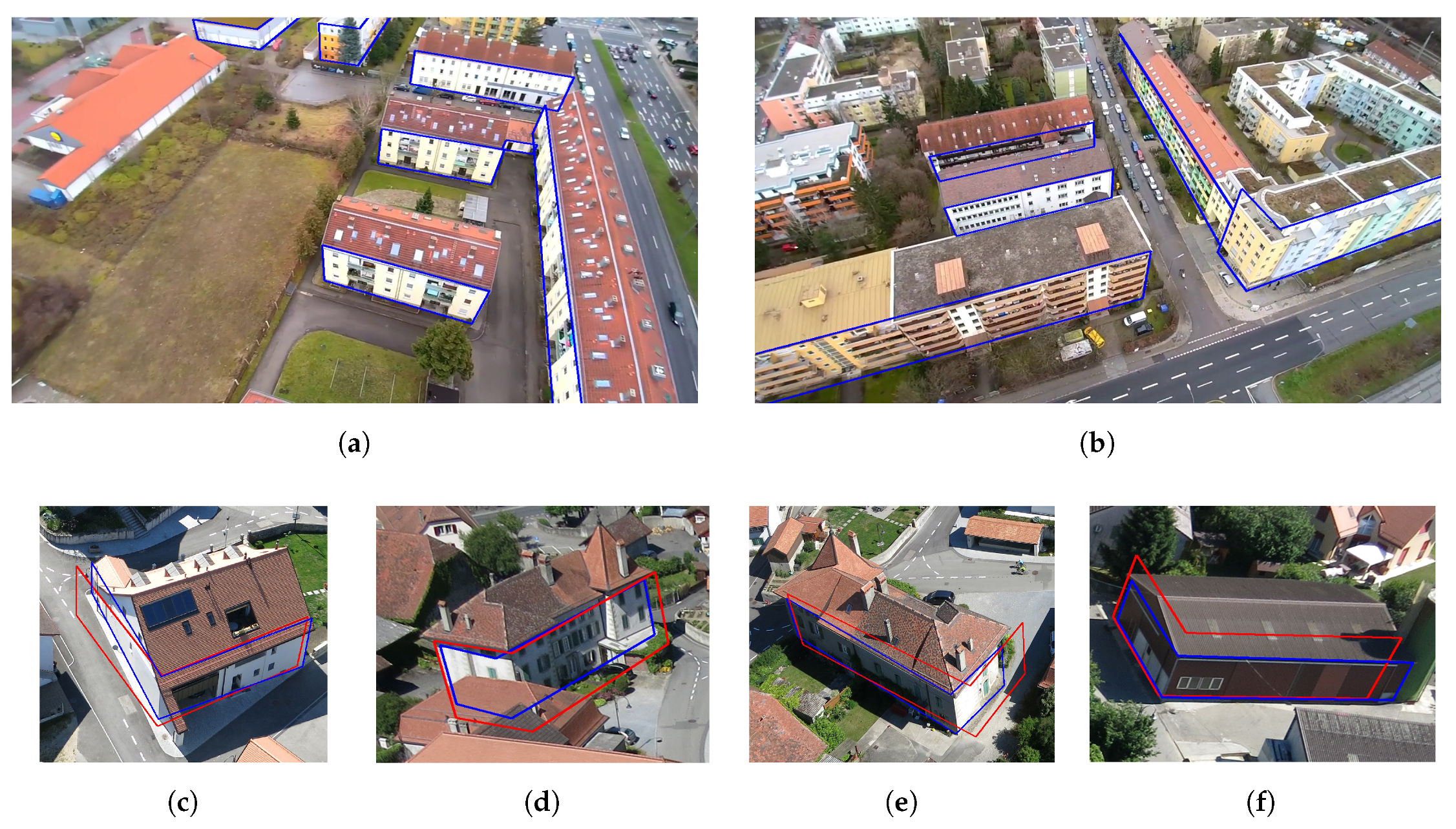
4.4. OSM Building Footprint Optimization
- The segmented building areas have accurate boundaries;
- Buildings are not occluded by vegetation or obstacles;
- The selected images are expected to be taken from different viewpoints so that all vertices of the building footprint can be optimized.
4.5. Accuracy Evaluation of Building Position and Height
5. Discussion
- Towards the goal of improving the absolute position accuracy of OSM building footprints, the UAV images are supposed to be accurately geo-referenced. However, it is also practical to simply align the OSM building footprint data to the users’ local reference system.
- Targeted at optimization of the complete building footprint, it is advised to design the UAV flight path to surround the buildings of interest; otherwise, only the visible building edges can be optimized.
- Since we use UAVs to acquire image data, our approach is suitable for regional improvement for buildings of interest. In most large-scale applications such as navigation, web-based visualization and city planning, the accuracy of OSM footprints is already sufficient. Accurate footprints (with sub-meter level accuracy) are usually needed for specific buildings of interest, and our approach can play its role in such cases.
- In many other regions of the world, there is no such high-quality footprint data like ATKIS; even in Germany, the ATKIS data is not freely accessible to the public. Our approach opens up the possibility to generate high-accuracy building footprints from OSM with comparable accuracy as ATKIS data.
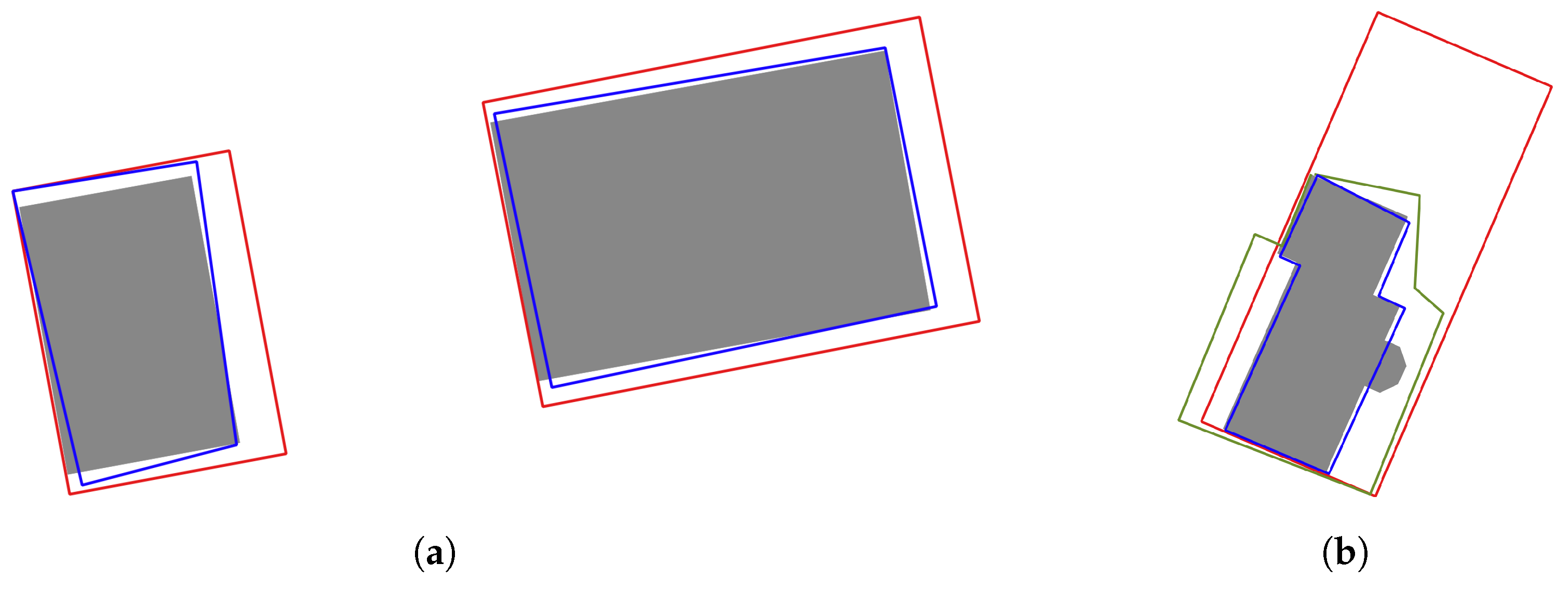
- The realistic building footprints excluding roof overhangs can be detected, i.e., the edges where the building façades meet the ground, whereas the footprints addressed in previous research are essentially the building roof including overhangs.
- The height information of buildings can be simultaneously refined with the building footprints.
- The proposed method has good generalization ability, as it can optimize not only a single building, but also multiple buildings with high tolerance for the spatial resolution of images.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| INS | Inertial Navigation System |
| GPS | Global Positioning System |
| RTK | Real Time Kinematic |
References
- Goetz, M. Towards generating highly detailed 3D CityGML models from OpenStreetMap. Int. J. Geogr. Inf. Sci. 2013, 27, 845–865. [Google Scholar] [CrossRef]
- Fan, H.; Zipf, A.; Fu, Q.; Neis, P. Quality assessment for building footprints data on OpenStreetMap. Int. J. Geogr. Inf. Sci. 2014, 28, 700–719. [Google Scholar] [CrossRef]
- Müller, S.; Wilhelm Zaum, D. Robust building detection in aerial images. Int. Arch. Photogramm. Remote Sens. 2005, 36, 143–148. [Google Scholar]
- Zhou, Q.Y.; Neumann, U. 2.5 d dual contouring: A robust approach to creating building models from aerial lidar point clouds. In Computer Vision—ECCV 2010, Proceedings of the European Conference on Computer Vision, Crete, Greece, 5–11 September 2010; Springer: Berlin, Germany, 2010; pp. 115–128. [Google Scholar]
- Lafarge, F.; Mallet, C. Creating large-scale city models from 3D-point clouds: A robust approach with hybrid representation. Int. J. Comput. Vis. 2012, 99, 69–85. [Google Scholar] [CrossRef]
- Xiao, J.; Gerke, M. Building footprint extraction based on radiometric and geometric constraints in airborne oblique images. Int. J. Image Data Fus. 2015, 6, 270–287. [Google Scholar] [CrossRef]
- Sirmacek, B.; Unsalan, C. Building detection from aerial images using invariant color features and shadow information. In Proceedings of the 23rd International Symposium on Computer and Information Sciences, Istanbul, Turkey, 27–29 October 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Zhu, Q.; Jiang, W.; Zhang, J. Feature line based building detection and reconstruction from oblique airborne imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 199. [Google Scholar] [CrossRef]
- Wegner, J.D.; Thiele, A.; Soergel, U. Fusion of optical and InSAR features for building recognition in urban areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, W4. [Google Scholar]
- Gevaert, C.; Persello, C.; Sliuzas, R.; Vosselman, G. Informal settlement classification using point-cloud and image-based features from UAV data. ISPRS J. Photogramm. Remote Sens. 2017, 125, 225–236. [Google Scholar] [CrossRef]
- Huang, Z.; Cheng, G.; Wang, H.; Li, H.; Shi, L.; Pan, C. Building extraction from multi-source remote sensing images via deep deconvolution neural networks. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1835–1838. [Google Scholar]
- Müller, W.; Seyfert, E.; Brandenburg, L. Quality assurance for 2.5-D building data of the ATKIS DLM 25/2. Int. Arch. Photogramm. Remote Sens. 1998, 32, 411–416. [Google Scholar]
- Dornaika, F.; Moujahid, A.; Merabet, Y.E.; Ruichek, Y. Building detection from orthophotos using a machine learning approach: An empirical study on image segmentation and descriptors. Expert Syst. Appl. 2016, 58, 130–142. [Google Scholar] [CrossRef]
- Ok, A.O.; Senaras, C.; Yuksel, B. Exploiting shadow evidence and iterative graph-cuts for efficient detection of buildings in complex environments. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W1, 269–274. [Google Scholar] [CrossRef]
- Dini, G.R.; Jacobsen, K.; Heipke, C. Delineation of building footprints from high resolution satellite stereo imagery using image matching and a GIS database. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W1, 81–85. [Google Scholar] [CrossRef]
- Dai, Y.; Gong, J.; Li, Y.; Feng, Q. Building segmentation and outline extraction from UAV image-derived point clouds by a line growing algorithm. Int. J. Digit. Earth 2017, 10, 1077–1097. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Fraser, C.S. Automatic segmentation of raw LIDAR data for extraction of building roofs. Remote Sens. 2014, 6, 3716–3751. [Google Scholar] [CrossRef]
- Bittner, K.; Cui, S.; Reinartz, P. Building extraction from remote sensing data using fully convolutional networks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 481. [Google Scholar] [CrossRef]
- Li, Y.; Wu, H.; An, R.; Xu, H.; He, Q.; Xu, J. An improved building boundary extraction algorithm based on fusion of optical imagery and LIDAR data. Optik Int. J. Light Electron Opt. 2013, 124, 5357–5362. [Google Scholar] [CrossRef]
- Nex, F.; Rupnik, E.; Remondino, F. Building footprints extraction from oblique imagery. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-3/W3, 61–66. [Google Scholar] [CrossRef]
- Hammoudi, K.; Dornaika, F. Extracting building footprints from 3D point clouds using terrestrial laser scanning at street level. In Proceedings of the Object Extraction for 3D City Models, Road Databases and Traffic Monitoring—Concepts, Algorithms and Evaluation (CMRT09), Paris, France, 3–4 September 2009. [Google Scholar]
- Yang, B.; Wei, Z.; Li, Q.; Li, J. Semiautomated building facade footprint extraction from mobile LiDAR point clouds. IEEE Geosci. Remote Sens. Lett. 2013, 10, 766–770. [Google Scholar] [CrossRef]
- Vacca, G.; Dessi, A.; Sacco, A. The use of nadir and oblique UAV images for building knowledge. ISPRS Int. J. GeoInf. 2017, 6, 393. [Google Scholar] [CrossRef]
- Lingua, A.; Noardo, F.; Spano, A.; Sanna, S.; Matrone, F. 3D model generation using oblique images acquired by UAV. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 107–115. [Google Scholar] [CrossRef]
- Aicardi, I.; Chiabrando, F.; Grasso, N.; Lingua, A.M.; Noardo, F.; Spanò, A. Uav photogrammetry with oblique images: First analysis on data acquisition and processing. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 835–842. [Google Scholar] [CrossRef]
- Feifei, X.; Zongjian, L.; Dezhu, G.; Hua, L. Study on construction of 3D building based on UAV images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 469–473. [Google Scholar]
- Onyango, F.; Nex, F.; Peter, M.; Jende, P. Accurate estimation of orientation parameters of UAV images through image registration with aerial oblique imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 599. [Google Scholar] [CrossRef]
- Zhuo, X.; Koch, T.; Kurz, F.; Fraundorfer, F.; Reinartz, P. Automatic UAV image geo-registration by matching UAV images to georeferenced image aata. Remote Sens. 2017, 9, 376. [Google Scholar] [CrossRef]
- Shelhamer, E.; Long, J.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Zheng, S.; Jayasumana, S.; Romera-Paredes, B.; Vineet, V.; Su, Z.; Du, D.; Huang, C.; Torr, P.H.S. Conditional random fields as recurrent neural networks. In Proceedings of the International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015. [Google Scholar]
- Arnab, A.; Jayasumana, S.; Zheng, S.; Torr, P.H.S. Higher order conditional random fields in deep neural networks. In Proceedings of the 14th European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Shih, F.Y. Image Processing and Mathematical Morphology: Fundamentals and Applications; CRC Press: Boca Raton, FL, USA, 2009; 439p. [Google Scholar]
- Mongus, D.; Žalik, B. Parameter-free ground filtering of LiDAR data for automatic DTM generation. ISPRS J. Photogramm. Remote Sens. 2012, 67, 1–12. [Google Scholar] [CrossRef]
- Borgefors, G. Distance transformations in digital images. Comput. Vis. Graph. Image Process. 1986, 34, 344–371. [Google Scholar] [CrossRef]
- Powell, M.J. An efficient method for finding the minimum of a function of several variables without calculating derivatives. Comput. J. 1964, 7, 155–162. [Google Scholar] [CrossRef]
- Press, W.H.; Flannery, B.P.; Teukolsky, S.A.; Vetterling, W.T. Numerical Recipes; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- senseFly. Oblique Mapping of a Village. Available online: https://www.sensefly.com/education/datasets/ (accessed on 1 February 2018).
- Müller, W.; Seyfert, E. Intelligent imagery system: A proposed approach. Int. Arch. Photogramm. Remote Sens. 2000, 33, 710–717. [Google Scholar]
- D’Angelo, P.; Reinartz, P. Semiglobal Matching Results on the ISPRS Stereo Matching Benchmark; High-Resolution Earth Imaging for Geospatial Information; ISPRS Hannover Workshop: Hannover, Germany, 2011. [Google Scholar]
- Kurz, F.; Rosenbaum, D.; Meynberg, O.; Mattyus, G.; Reinartz, P. Performance of a real-time sensor and processing system on a helicopter. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 189–193. [Google Scholar] [CrossRef]
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Girshick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional architecture for fast feature embedding. arXiv, 2014; arXiv:1408.5093. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | UAV Image | ||||||
|---|---|---|---|---|---|---|---|
| Date | Resolution (pix) | Height (m) | Pitch Angle | GSD (cm) | Number of Images per Building | Registration | |
| A | 10/2016 | 20–50 | 40– | 0.96 | 375 | MA | |
| B | 10/2016 | 20–45 | 1.09 | 142 | AA | ||
| C | 01/2016 | 40 | 14.33 | 24–86 | MA | ||
| D | 06/2014 | 100 | 5.46 | 31–37 | MA | ||
| Scenario | Building | Initial | Optimized | ||||
|---|---|---|---|---|---|---|---|
| (m) | (m) | Distance (m) | (m) | (m) | Distance (m) | ||
| A | 1 | 0.207 | −1.213 | 1.230 | 0.623 | −0.328 | 0.704 |
| −0.374 | 0.942 | 1.014 | 0.145 | 0.427 | 0.451 | ||
| 1.601 | 1.545 | 2.225 | 0.020 | 0.137 | 0.139 | ||
| 2.247 | −0.521 | 2.307 | 0.276 | 0.165 | 0.322 | ||
| 2 | 1.733 | 1.157 | 2.084 | 0.233 | 0.657 | 0.697 | |
| 2.114 | −0.511 | 2.175 | −0.164 | −0.097 | 0.190 | ||
| 0.080 | −0.899 | 0.902 | 0.655 | −0.481 | 0.813 | ||
| average | 1.705 | 0.474 | |||||
| B | 1 | 0.275 | 0.043 | 0.278 | 0.395 | −0.037 | 0.397 |
| 0.758 | 1.337 | 1.537 | 0.118 | −0.383 | 0.401 | ||
| 2.635 | 0.436 | 2.671 | 0.345 | −0.074 | 0.353 | ||
| 2.756 | −0.400 | 2.785 | 0.326 | −0.100 | 0.341 | ||
| 2.848 | −1.306 | 3.133 | 0.233 | −0.008 | 0.233 | ||
| −2.807 | 0.522 | 2.856 | 0.142 | −0.102 | 0.175 | ||
| −2.632 | 1.763 | 3.168 | 0.218 | −0.227 | 0.314 | ||
| 0.342 | 0.461 | 0.574 | 0.192 | −0.209 | 0.284 | ||
| average | 2.125 | 0.312 | |||||
| C | 1 | 0.039 | −2.073 | 2.073 | −0.029 | −0.682 | 0.683 |
| −0.078 | −1.927 | 1.928 | −0.174 | −0.540 | 0.567 | ||
| 0.695 | −1.509 | 1.661 | 0.027 | 0.201 | 0.203 | ||
| 2 | −0.303 | 0.271 | 0.406 | −0.252 | −0.250 | 0.355 | |
| 0.397 | 0.406 | 0.568 | 0.155 | 0.116 | 0.194 | ||
| 3 | 0.492 | −1.415 | 1.498 | −0.144 | 0.748 | 0.761 | |
| −0.053 | −1.412 | 1.413 | 0.530 | 0.437 | 0.687 | ||
| 4 | 0.708 | −1.944 | 2.069 | 0.471 | −0.451 | 0.651 | |
| 0.303 | −1.917 | 1.941 | −0.387 | −0.668 | 0.772 | ||
| 5 | 0.543 | −1.638 | 1.726 | 0.365 | −0.417 | 0.554 | |
| 0.150 | −1.368 | 1.376 | 0.239 | −0.382 | 0.451 | ||
| 6 | 0.144 | 0.579 | 0.596 | 0.105 | 0.320 | 0.337 | |
| 0.423 | 0.501 | 0.656 | 0.282 | 0.360 | 0.457 | ||
| average | 1.378 | 0.513 | |||||
| Building | Optimized H (m) | ATKIS H (m) | Error H (m) |
|---|---|---|---|
| 1 | 3.20 | 3.5 | −0.30 |
| 2 | 10.96 | 11.53 | −0.57 |
| 3 | 17.5 | 17.83 | −0.33 |
| 4 | 19.7 | 21.00 | −1.30 |
| 5 | 5.24 | 5.79 | −0.55 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuo, X.; Fraundorfer, F.; Kurz, F.; Reinartz, P. Optimization of OpenStreetMap Building Footprints Based on Semantic Information of Oblique UAV Images. Remote Sens. 2018, 10, 624. https://doi.org/10.3390/rs10040624
Zhuo X, Fraundorfer F, Kurz F, Reinartz P. Optimization of OpenStreetMap Building Footprints Based on Semantic Information of Oblique UAV Images. Remote Sensing. 2018; 10(4):624. https://doi.org/10.3390/rs10040624
Chicago/Turabian StyleZhuo, Xiangyu, Friedrich Fraundorfer, Franz Kurz, and Peter Reinartz. 2018. "Optimization of OpenStreetMap Building Footprints Based on Semantic Information of Oblique UAV Images" Remote Sensing 10, no. 4: 624. https://doi.org/10.3390/rs10040624
APA StyleZhuo, X., Fraundorfer, F., Kurz, F., & Reinartz, P. (2018). Optimization of OpenStreetMap Building Footprints Based on Semantic Information of Oblique UAV Images. Remote Sensing, 10(4), 624. https://doi.org/10.3390/rs10040624