Measurements on the Absolute 2-D and 3-D Localization Accuracy of TerraSAR-X

Abstract
:1. Introduction
2. Background
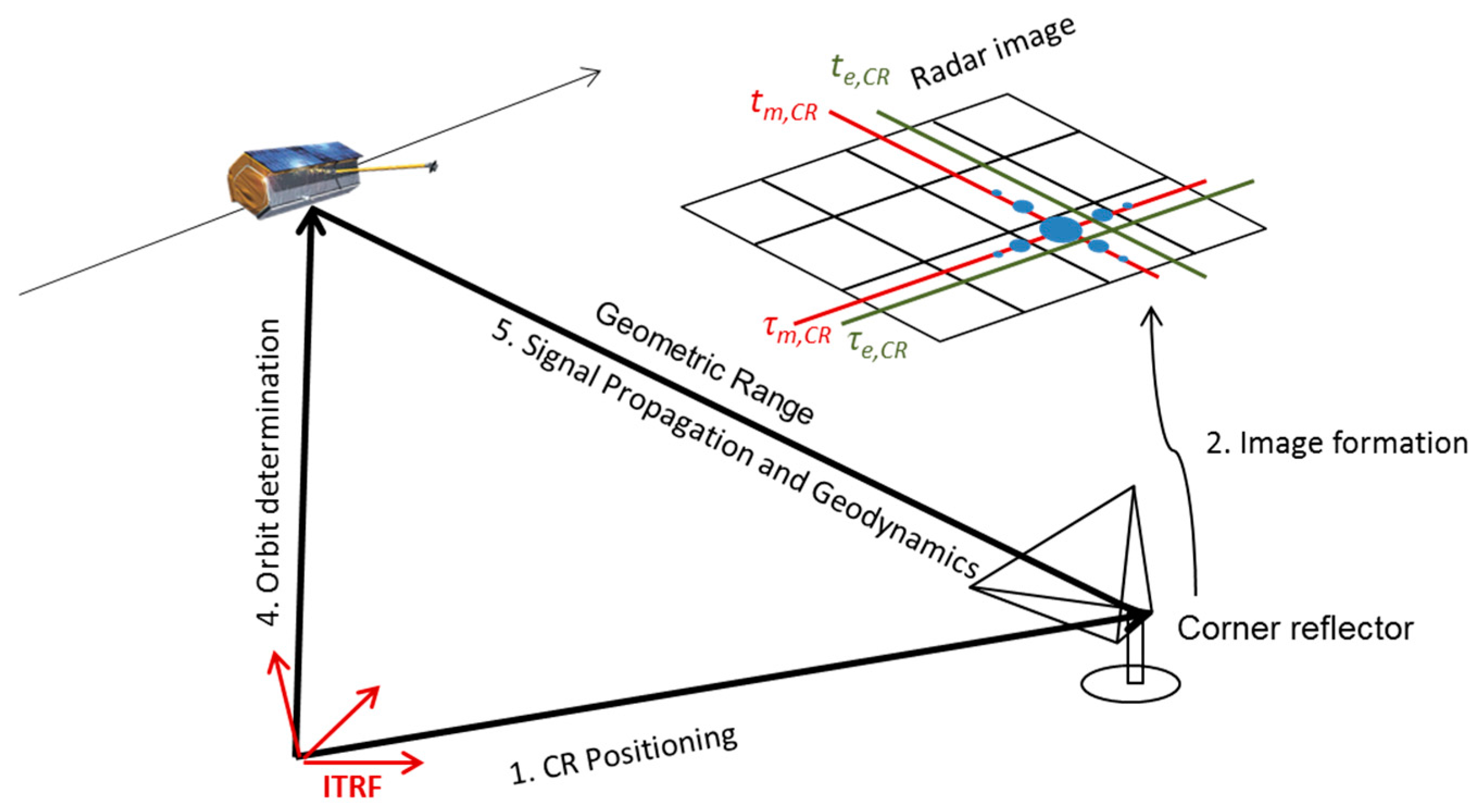
2.1. Location Measurements by SAR
2.2. SAR Positioning with Stereo SAR
3. Materials and Methods
3.1. Verification of the Geolocation Accuracy of SAR
3.2. Geometric Recalibration of the Sensor
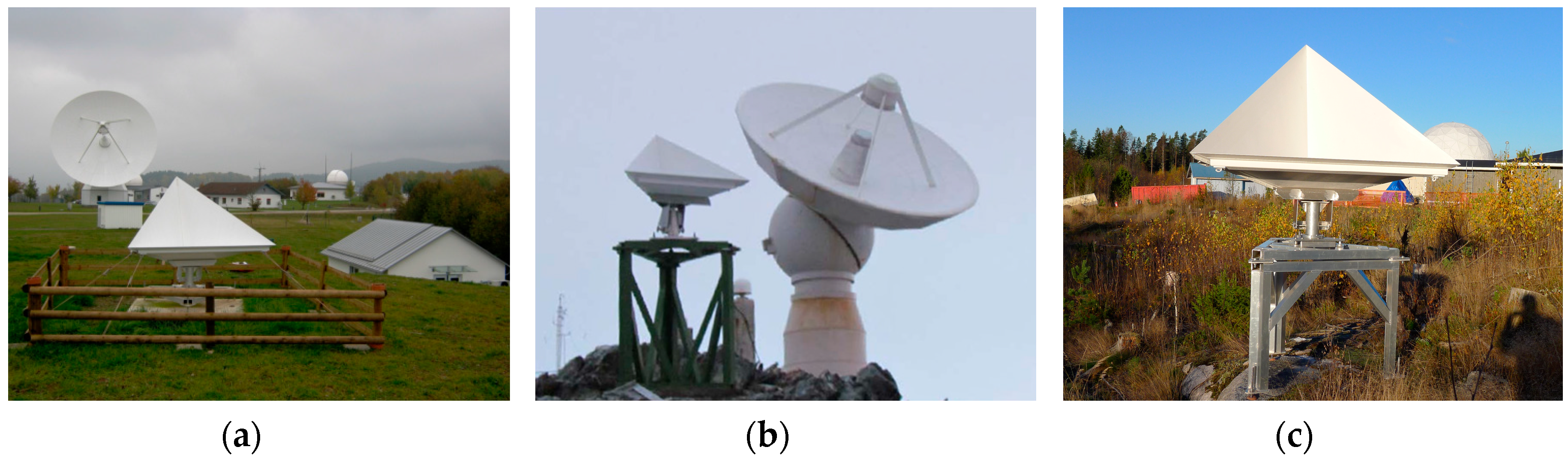
3.3. Our TerraSAR-X Test Sites
3.4. TerraSAR-X Datatakes
4. Results and Analysis
4.1. Monitoring the Operational Readiness of a CR
4.2. Geometric Recalibration Constants
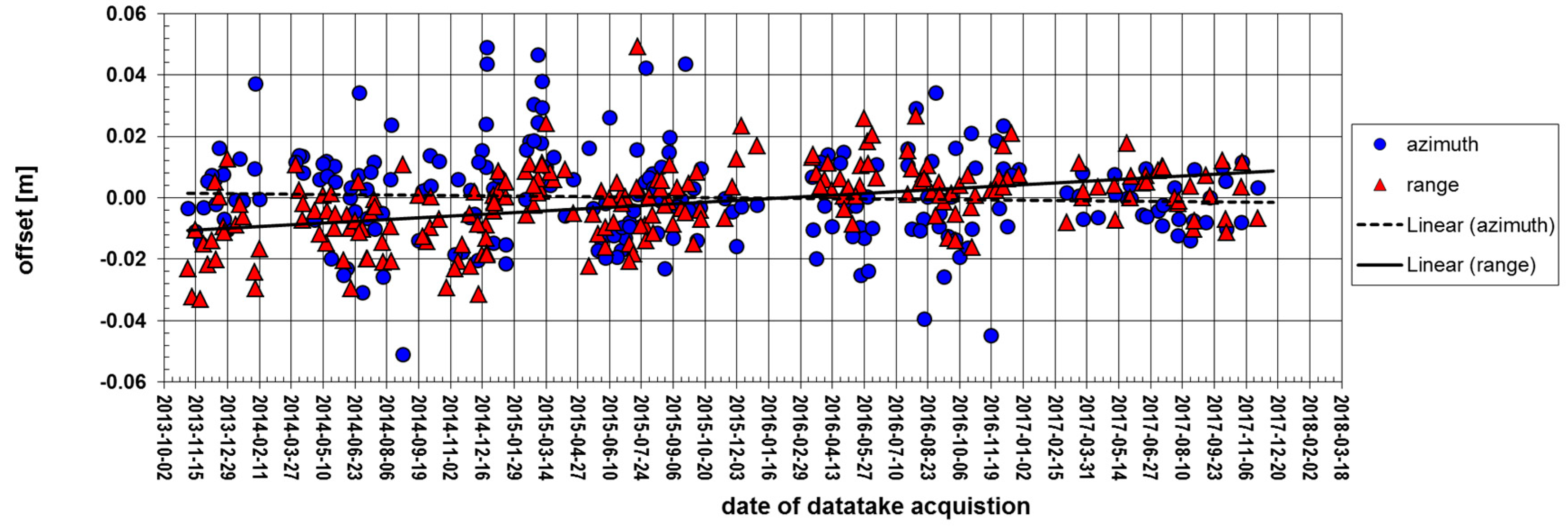
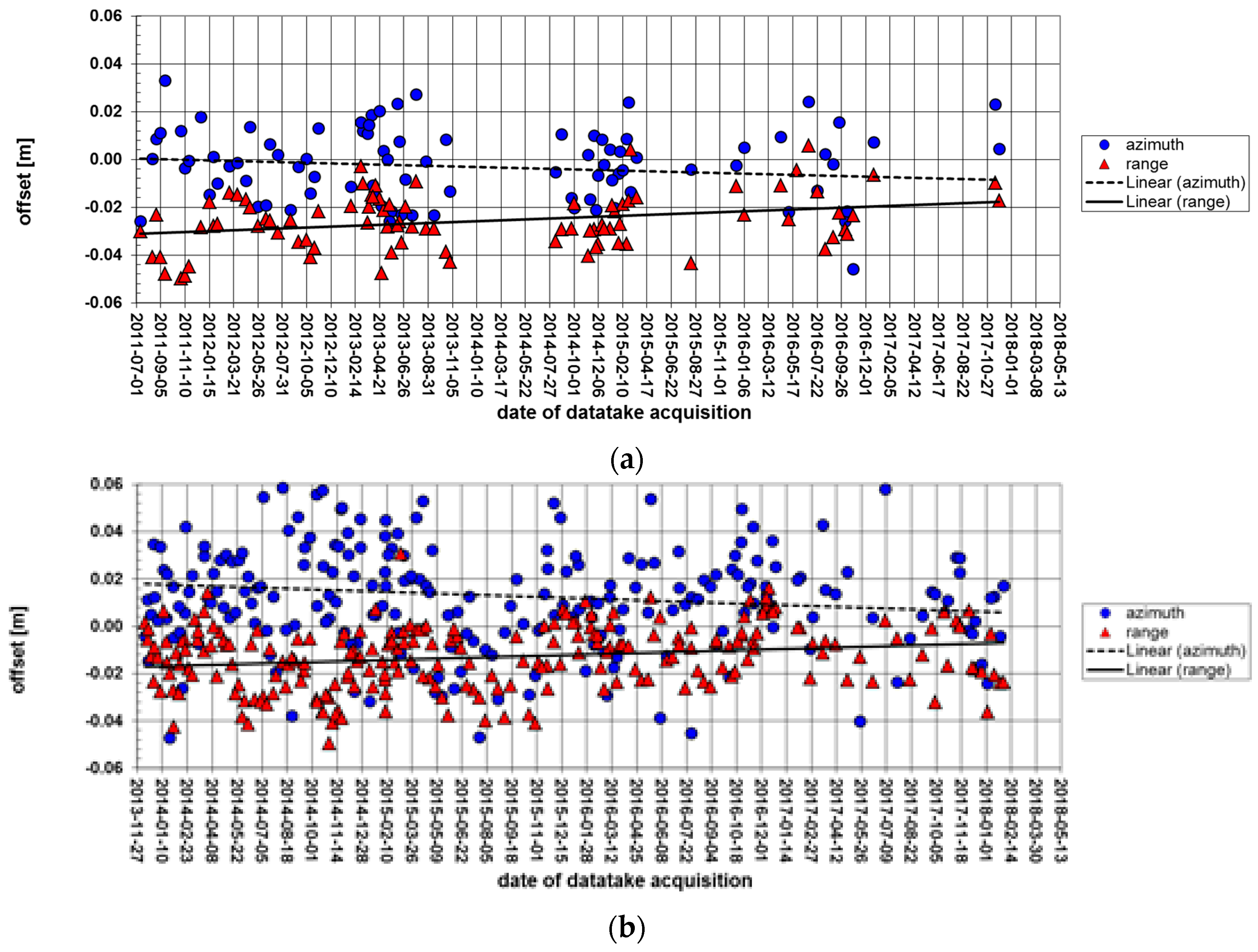
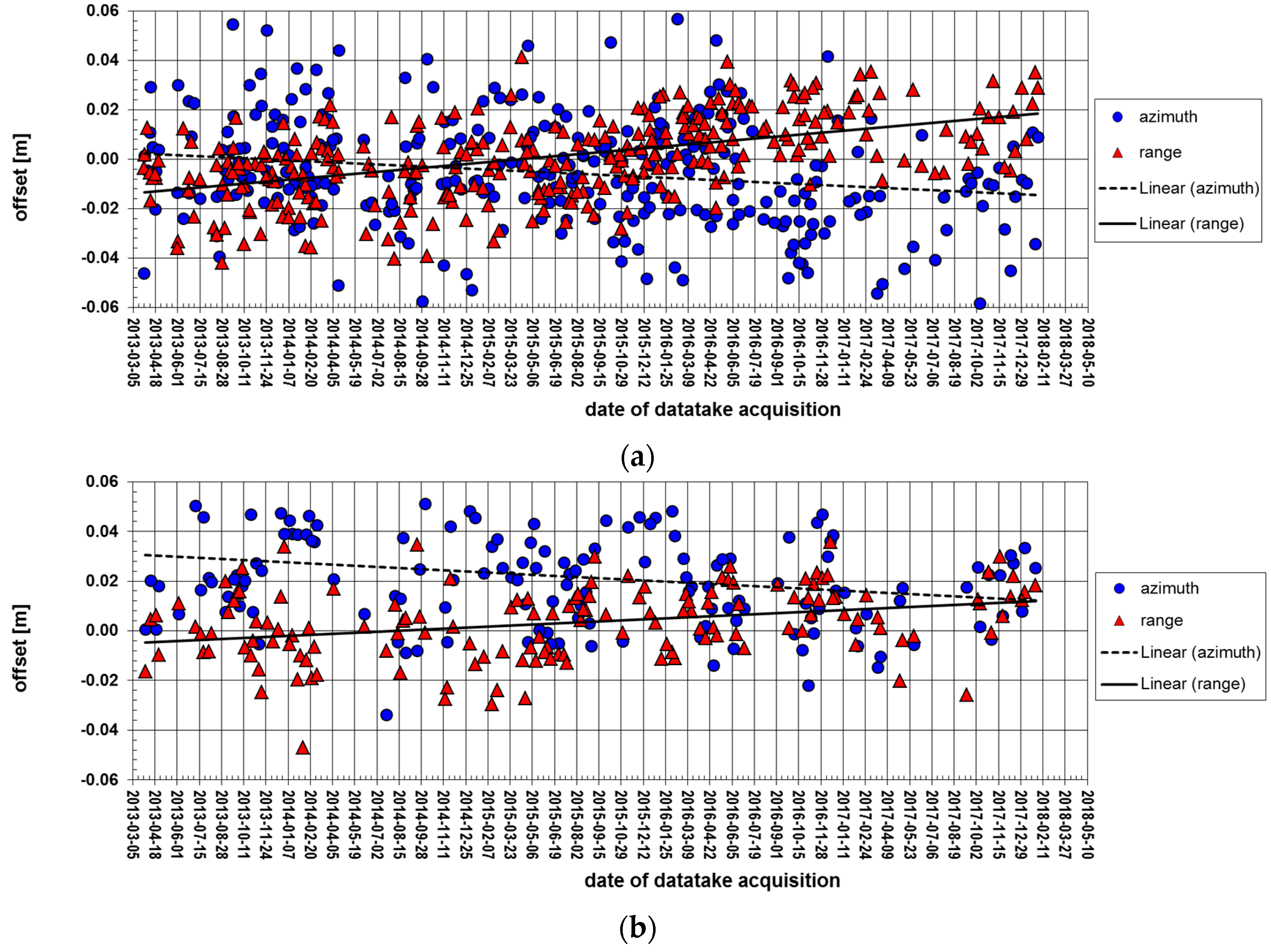
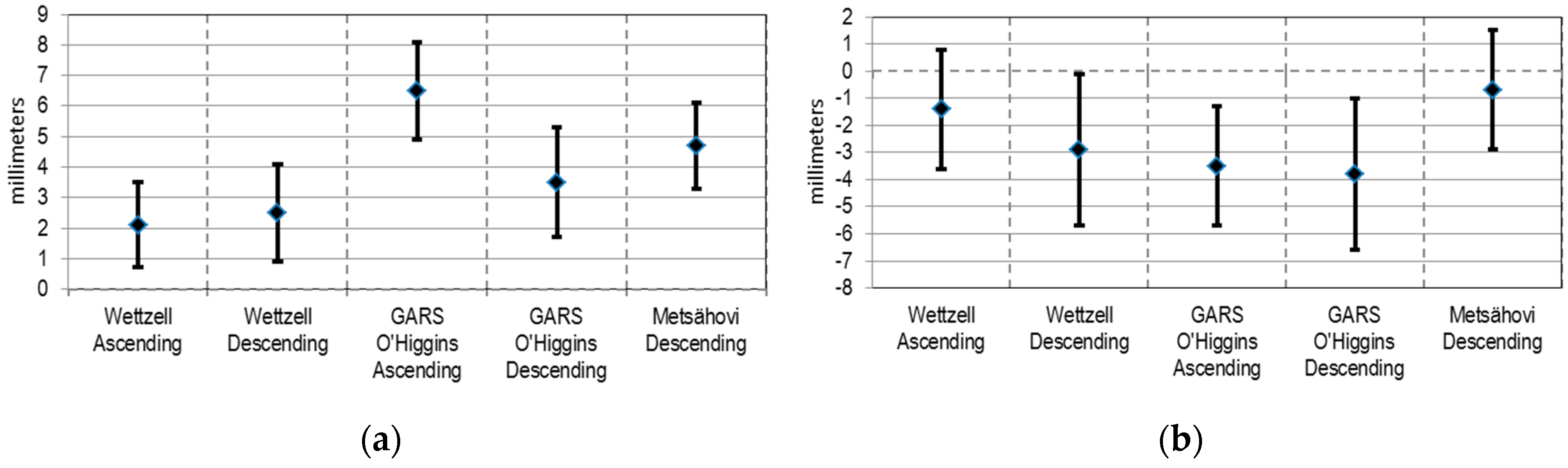
4.3. Temporal Stability of SAR Geolocation Results
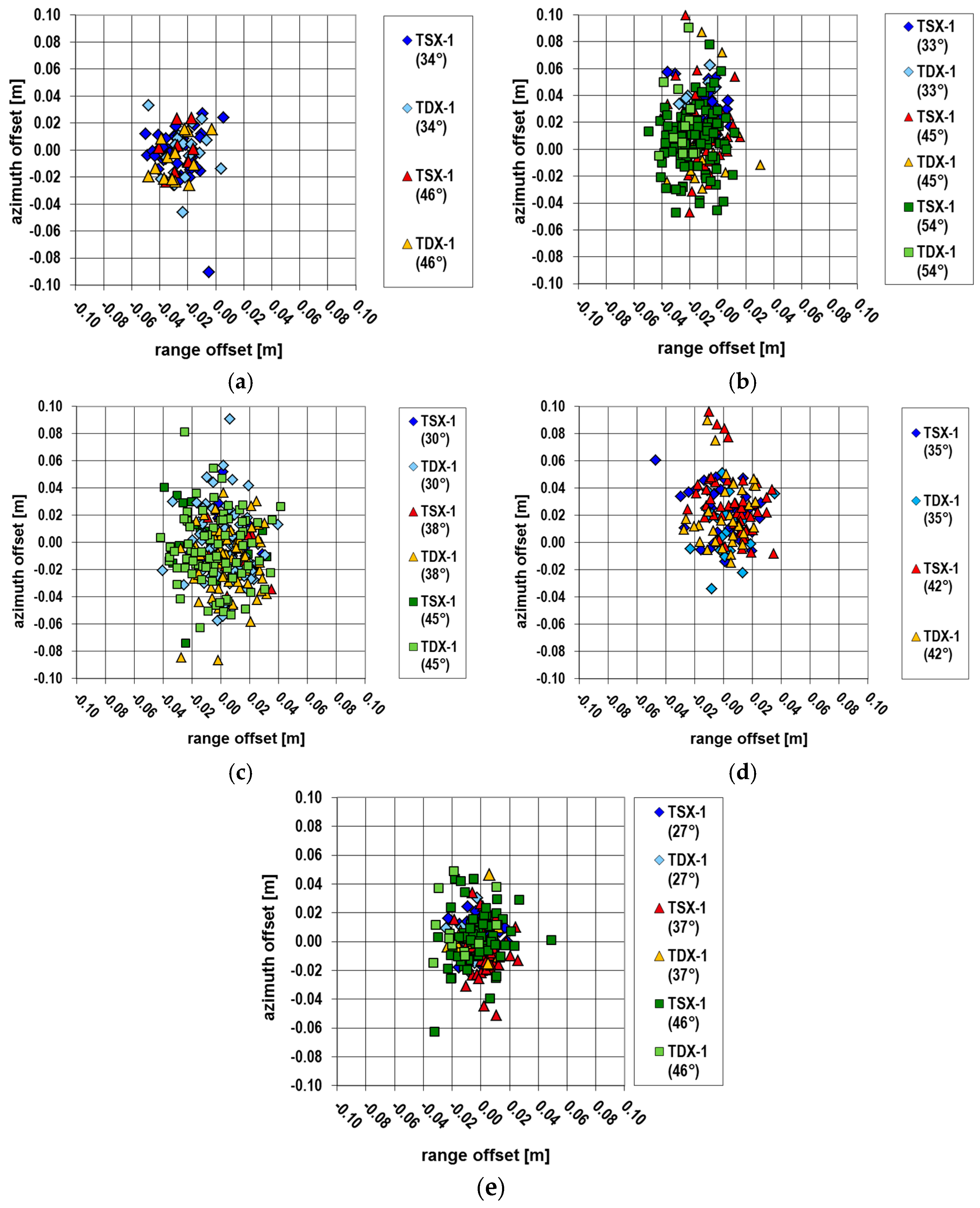
4.4. Analysis for Angular Dependencies
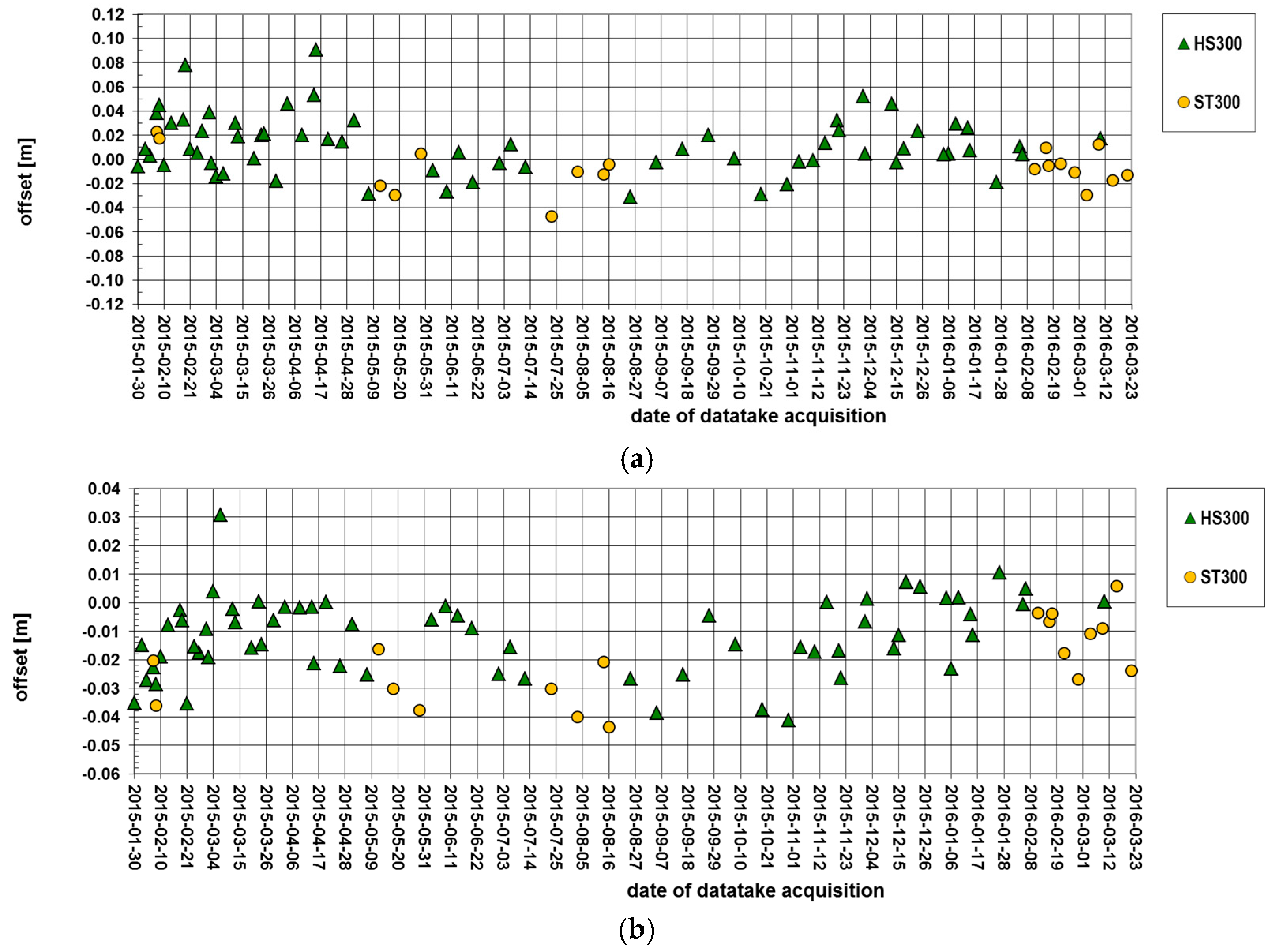
4.5. Comparison of Different Imaging Modes
4.6. Location Independency of Results
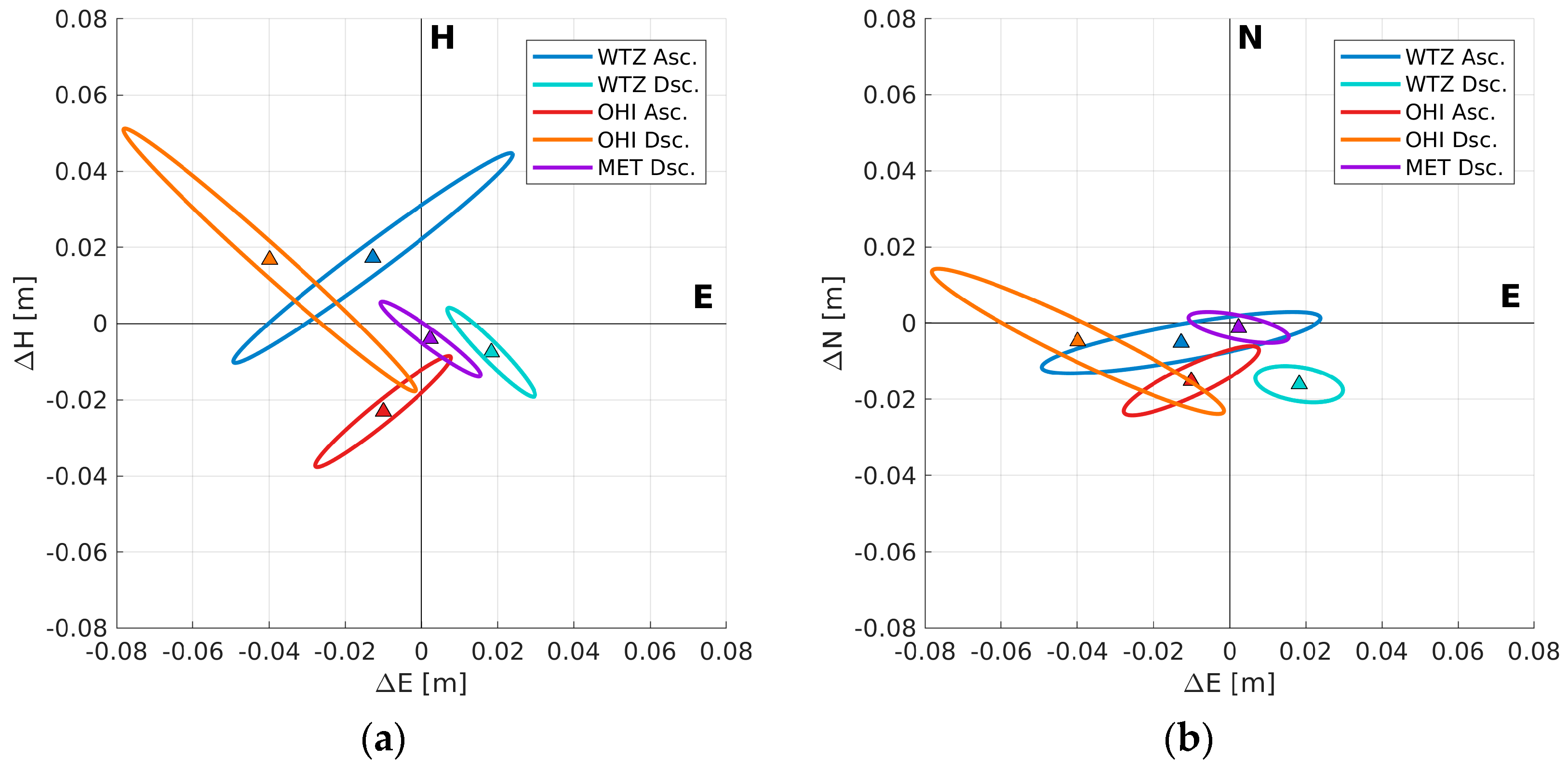
4.7. 3-D Coordinates
5. Discussion
5.1. Analysis of Error Contributions
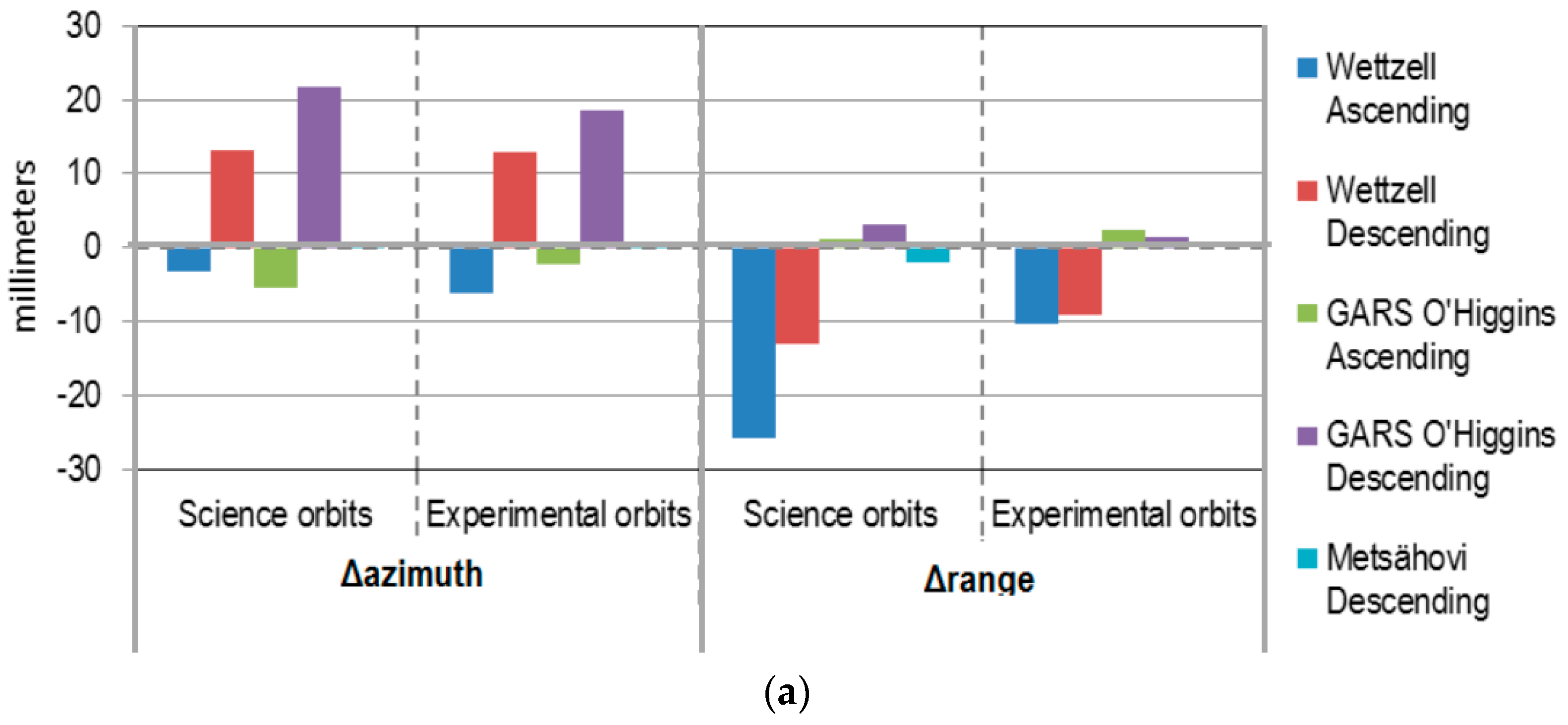
5.2. Geolocation Improvements from More Precise Orbit Determination
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Schubert, A.; Jehle, M.; Small, D.; Meier, E. Mitigation of Atmosphere Perturbations and Solid Earth Movements in a TerraSAR-X Time Series. J. Geod. 2011, 86, 257–270. [Google Scholar] [CrossRef]
- Balss, U.; Cong, X.Y.; Brcic, R.; Rexer, M.; Minet, C.; Breit, H.; Eineder, M.; Fritz, T. High Precision Measurement on the Absolute Localization Accuracy of TerraSAR-X. In Proceedings of the 2012 IEEE International Geoscience & Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 1625–1628. [Google Scholar]
- Balss, U.; Gisinger, C.; Cong, X.Y.; Brcic, R.; Hackel, S.; Eineder, M. Precise Measurements on the Absolute Localization Accuracy of TerraSAR-X on the Base of Far-Distributed Test Sites. In Proceedings of the 10th European Conference on Synthetic Aperture Radar (EUSAR), Berlin, Germany, 3–5 June 2014; pp. 993–996. [Google Scholar]
- Capaldo, P.; Fratarcangeli, F.; Nascetti, A.; Mazzoni, A.; Porfiri, M.; Crespi, M. Centimeter Range Measurement Using Amplitude Data of TerraSAR-X Imagery. In Proceedings of the ISPRS Technical Commission VII Symposium, Istanbul, Turkey, 29 September–2 October 2014; pp. 55–61. [Google Scholar]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A New Release of the International Terrestrial Reference Frame Modeling Nonlinear Station Motions. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef]
- Schubert, A.; Small, D.; Jehle, M.; Meier, E. COSMO-SkyMed, TerraSAR-X, and RADARSAT-2 Geolocation Accuracy after Compensation for Earth-System Effects. In Proceedings of the 2012 IEEE International Geoscience & Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 3301–3304. [Google Scholar]
- Petit, G.; Luzum, B. IERS Conventions (2010); IERS Technical Note 36; Verlag des Bundesamtes für Kartographie und Geodäsie: Frankfurt, Germany, 2010. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS Global Navigation Satellite Systems; Springer: Vienna, Austria, 2008; ISBN 978-3-211-73012-6. [Google Scholar]
- Meindl, M.; Dach, R.; Jean, Y. International GNSS Service Technical Report 2011; Astronomical Institute University of Bern: Bern, Switzerland, 2012. [Google Scholar]
- Balss, U.; Gisinger, C.; Cong, X.Y.; Brcic, R.; Steigenberger, P.; Eineder, M.; Pail, R.; Hugentobler, U. High Resolution Geodetic Earth Observation with TerraSAR-X: Correction Schemes and Validation. In Proceedings of the 2013 IEEE International Geoscience & Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 4499–4502. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar: Algorithms and Implementations; Artech House: Boston, MA, USA, 2005; ISBN 978-1-580-53058-3. [Google Scholar]
- Gisinger, C.; Balss, U.; Pail, R.; Zhu, X.X.; Montazeri, S.; Gernhardt, S.; Eineder, M. Precise Three-Dimensional Stereo Localization of Corner Reflectors and Persistent Scatterers With TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1782–1802. [Google Scholar] [CrossRef]
- Mikhail, E.M.; Ackermann, F. Observations and Least Squares; IEP-Dun-Donnelly, Harper and Row: New York, NY, USA, 1976. [Google Scholar]
- Koch, K.R.; Kusche, J. Regularization of geopotential determination from satellite data by variance components. J. Geod. 2012, 76, 259–268. [Google Scholar] [CrossRef]
- Koch, K.R. Parameter Estimation and Hypotheses Testing in Linear Models; Springer: Berlin/Heidelberg, Germany, 1999; ISBN 978-3-642-08461-4. [Google Scholar]
- Gray, A.L.; Vachon, P.W.; Livingstone, C.E.; Lukowski, T.I. Synthetic Aperture Radar Calibration Using Reference Reflectors. IEEE Trans. Geosci. Remote Sens. 1990, 28, 374383. [Google Scholar] [CrossRef]
- Bamler, R.; Eineder, M. Accuracy of Differential Shift Estimation by Correlation and Split-Bandwidth Interferometry for Wideband and Delta-k SAR Systems. Geosci. Remote Sens. Lett. 2005, 2, 151–155. [Google Scholar] [CrossRef]
- Stein, S. Algorithms for Ambiguity Function Processing. IEEE Trans. Acoust. Speech Signal Process. 1981, ASSP-29, 588–599. [Google Scholar] [CrossRef]
- Swerling, P. Radar Measurement Accuracy. In Radar Handbook; Skolnik, M., Ed.; McGraw-Hill: New York, NY, USA, 1970; pp. 4:1–4:14. [Google Scholar]
- Schubert, A.; Small, D.; Gisinger, C.; Balss, U.; Eineder, M. Corner Reflector Deployment for SAR Geometric Calibration and Performance Assessment; ESRIN: Frascati, Italy, 2018; in press. [Google Scholar]
- Balss, U.; Gisinger, C.; Eineder, M.; Breit, H.; Schubert, A.; Small, D. Survey Protocol for Geodetic SAR Sensor Analysis; ESRIN: Frascati, Italy, 2018; in press. [Google Scholar]
- Schwerdt, M.; Bräutigam, B.; Bachmann, M.; Döring, B.; Schrank, D.; Gonzalez, J.H. Final TerraSAR-X Calibration Results Based on Novel Efficient Methods. IEEE Trans. Geosci. Remote Sens. 2010, 48, 677–689. [Google Scholar] [CrossRef]
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M.; Niedermeier, A.; Vonavka, M. TerraSAR-X Processing and Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–739. [Google Scholar] [CrossRef]
- Fritz, T.; Eineder, M. TerraSAR-X Ground Segment Basic Product Specification Document. Available online: http://sss.terrasar-x.dlr.de/docs/TX-GS-DD-3302.pdf (accessed on 15 February 2018).
- EOWEB Earth Observation on the WEB. Available online: https://centaurus.caf.dlr.de:8443 (accessed on 16 February 2018).
- TerraSAR-X Science Service System. Available online: http://sss.terrasar-x.dlr.de (accessed on 26 February 2018).
- Balss, U.; Breit, H.; Fritz, T.; Steinbrecher, U.; Gisinger, C.; Eineder, M. Analysis of Internal Timings and Clock Rates of TerraSAR-X. In Proceedings of the 2014 IEEE International Geoscience & Remote Sensing Symposium (IGARSS), Quebec, QC, Canada, 13–18 July 2014; pp. 2671–2674. [Google Scholar]
- Hackel, S.; Gisinger, C.; Balss, U.; Wermuth, M.; Montenbruck, O. Long-Term Validation of TerraSAR-X Orbit Solutions with Laser and Radar Measurements. Remote Sens. Spec. 2018, in press. [Google Scholar]
- Werninghaus, R.; Buckreuss, S. The TerraSAR-X Mission and System Design. IEEE Trans. Geosci. Remote Sens. 2010, 48, 606–614. [Google Scholar] [CrossRef] [Green Version]
- Gisinger, C.; Willberg, M.; Balss, U.; Klügel, T.; Mähler, S.; Pail, R.; Eineder, M. Differential geodetic stereo SAR with TerraSAR-X by exploiting small multi-directional radar reflectors. J. Geod. 2017, 91, 53–67. [Google Scholar] [CrossRef]
- Yoon, Y.; Eineder, M.; Yague-Martinez, N.; Montenbruck, O. TerraSAR-X Precise Trajectory Estimation and Quality Assessment. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1859–1868. [Google Scholar] [CrossRef]
- Runge, H.; Balss, U.; Suchandt, S.; Klarner, R.; Cong, X.Y. DriveMark—Generation of High Resolution Road Maps with Radar Satellites. In Proceedings of the 11th ITS European Congress, Glasgow, UK, 6–9 June 2016; pp. 1–6. [Google Scholar]
- Eldhuset, K.; Weydahl, D.J. Geolocation and Stereo Height Estimation Using TerraSAR-X Spotlight Image Data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3574–3581. [Google Scholar] [CrossRef]
- Zhu, X.X.; Montazeri, S.; Gisinger, C.; Hanssen, R.F.; Bamler, R. Geodetic SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 18–35. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Corner Reflector/ Measurement Series | Acquisitions Started at | Optimum Incidence Angle 1 | Additional Incidence Angle(s) |
|---|---|---|---|
| Wettzell Ascending | 12 Jul. 2011 | 34° | 46° (since 2 Mar. 2013) |
| Wettzell Descending | 11 Dec. 2013 | 45° | 33°, 54° |
| GARS O’Higgins Ascending | 27 Mar. 2013 | 38° | 30°, 45° |
| GARS O’Higgins Descending | 24 Mar. 2013 | 35° | 42° |
| Metsähovi Descending | 4 Nov. 2013 | 37° | 27°, 46° |
| Test Site | Latitude [°N] | Longitude [°E] |
|---|---|---|
| Wettzell | +49.145 | +12.876 |
| GARS O’Higgins | ‒63.321 | ‒57.902 |
| Metsähovi | +60.217 | +24.395 |
| Satellite | Polarization | Azimuth [s] 1 | Range [s] | Azimuth [m] ² | Range [m] ³ |
|---|---|---|---|---|---|
| TSX-1 | HH | ‒9.7·10‒6 | ‒2.01·10‒9 | ‒0.068 | ‒0.301 |
| TSX-1 | VV | ‒9.7·10‒6 | ‒2.28·10‒9 | ‒0.068 | ‒0.342 |
| TDX-1 | HH | ‒7.7·10‒6 | ‒1.82·10‒9 | ‒0.054 | ‒0.273 |
| TDX-1 | VV | ‒7.7·10‒6 | ‒2.09·10‒9 | ‒0.054 | ‒0.313 |
| Measurement Series | Azimuth Gradient [mm/y] | Range Gradient [mm/y] |
|---|---|---|
| Wettzell Ascending | ‒1.4 ± 1.1 | +2.1 ± 0.7 |
| Wettzell Descending | ‒2.9 ± 1.4 | +2.5 ± 0.8 |
| GARS O’Higgins Ascending | ‒3.5 ± 1.1 | +6.5 ± 0.8 |
| GARS O’Higgins Descending | ‒3.8 ± 1.4 | +3.5 ± 0.9 |
| Metsähovi Descending | ‒0.7 ± 1.1 | +4.7 ± 0.7 |
| Measurement Series | Incid. Angle | # of Meas. | Azimuth Offset [mm] | Range Offset [mm] |
|---|---|---|---|---|
| Wettzell Ascending | 34 | 65 | ‒2.9 ± 18.6 | ‒25.1 ± 12.0 |
| 46 | 23 | ‒4.1 ± 15.5 | ‒27.4 ± 10.5 | |
| Wettzell Descending | 33 | 42 | +29.5 ± 15.7 | ‒10.4 ± 11.2 |
| 45 | 75 | +11.5 ± 25.3 | ‒8.3 ± 13.2 | |
| 54 | 112 | +8.0 ± 23.7 | ‒17.2 ± 13.1 | |
| GARS O’Higgins Asc. | 30 | 112 | ‒0.7 ± 23.5 | +3.9 ± 17.0 |
| 38 | 86 | ‒11.6 ± 22.9 | +5.0 ± 14.8 | |
| 45 | 104 | ‒5.3 ± 25.7 | ‒5.2 ± 18.8 | |
| GARS O’Higgins Desc. | 35 | 62 | +17.6 ± 19.8 | +0.9 ± 14.9 |
| 42 | 85 | +24.9 ± 23.2 | +4.9 ± 14.0 | |
| Metsähovi Descending | 27 | 61 | +3.5 ± 10.7 | ‒2.5 ± 9.3 |
| 37 | 75 | -4.0 ± 15.6 | +1.2 ± 9.7 | |
| 46 | 79 | +1.6 ± 22.3 | ‒4.4 ± 15.0 |
| Measurement Series | # of Measurements | Azimuth Offset [mm] | Range Offset [mm] |
|---|---|---|---|
| Wettzell Ascending | 88 | ‒3.2 ± 17.7 | ‒25.7 ± 11.6 |
| Wettzell Descending | 229 | +13.1 ± 24.3 | ‒13.0 ± 13.4 |
| GARS O’Higgins Ascending | 302 | ‒5.4 ± 24.4 | +1.1 ± 17.6 |
| GARS O’Higgins Descending | 147 | +21.8 ± 22.1 | +3.2 ± 14.5 |
| Metsähovi Descending 1 | 215 | +0.2 ± 17.5 | ‒1.9 ± 12.0 |
| Measurement Series | ΔN [mm] | ΔE [mm] | ΔH [mm] | σN [mm] | σE [mm] | σH [mm] |
|---|---|---|---|---|---|---|
| Wettzell Ascending | ‒5.2 | ‒12.7 | +17.2 | +8.0 | +36.6 | +27.5 |
| Wettzell Descending | ‒16.0 | +18.3 | ‒7.5 | +4.8 | +11.5 | +11.7 |
| GARS O’Higgins Ascending | ‒15.1 | ‒10.1 | ‒23.1 | +9.1 | +17.8 | +14.6 |
| GARS O’Higgins Descending | ‒4.8 | ‒39.9 | +16.7 | +19.1 | +38.3 | +34.4 |
| Metsähovi Descending 1 | ‒1.1 | +2.4 | ‒4.0 | +4.0 | +13.2 | +9.8 |
| Parameter | Azimuth Contribution [mm] | Range Contribution [mm] |
|---|---|---|
| Clutter | 0.3‒12 1 | 0.7‒6 1 |
| Tropospheric delay | ‒ | 0.5‒1.3 2 |
| Ionospheric delay | ‒ | 1.5‒5.3 2 |
| Timing and ADC sample rate | 7 | <3 |
| (Science) Orbit | <50 3 | <50 3 |
| Measurement Series | Azimuth Offset [mm] | Range Offset [mm] | ||
|---|---|---|---|---|
| Science Orbits | Experimental Orbits | Science Orbits | Experimental Orbits | |
| Wettzell Asc. | ‒3.2 ± 17.7 | ‒6.1 ± 13.4 | ‒25.7 ± 11.6 | ‒10.2 ± 7.6 |
| Wettzell Desc. | +13.1 ± 24.3 | +12.9 ± 22.7 | ‒13.0 ± 13.4 | ‒9.2 ± 9.8 |
| GARS O’Higgins Asc. | ‒5.4 ± 24.4 | ‒2.2 ± 28.5 | +1.1 ± 17.6 | +2.4 ± 14.5 |
| GARS O’Higgins Desc. | +21.8 ± 22.1 | +18.5 ± 17.6 | +3.2 ± 14.5 | +1.4 ± 14.0 |
| Metsähovi Desc. | +0.2 ± 17.5 | ‒0.4 ± 15.0 | ‒1.9 ± 12.0 | 0.0 ± 9.1 |
| Measurement Series | ΔN [mm] | ΔE [mm] | ΔH [mm] | σN [mm] | σE [mm] | σH [mm] |
|---|---|---|---|---|---|---|
| Wettzell Ascending | ‒9.0 | ‒18.8 | +0.1 | +6.0 | +23.5 | +17.9 |
| Wettzell Descending | ‒14.3 | +11.9 | ‒1.1 | +4.2 | +9.1 | +9.2 |
| GARS O’Higgins Ascending | ‒6.3 | ‒4.6 | ‒14.1 | +9.0 | +17.3 | +14.1 |
| GARS O’Higgins Descending | ‒8.4 | ‒24.4 | +10.9 | +17.0 | +34.4 | +30.9 |
| Metsähovi Descending 1 | +1.8 | ‒7.8 | +5.6 | +3.5 | +11.4 | +8.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balss, U.; Gisinger, C.; Eineder, M. Measurements on the Absolute 2-D and 3-D Localization Accuracy of TerraSAR-X. Remote Sens. 2018, 10, 656. https://doi.org/10.3390/rs10040656
Balss U, Gisinger C, Eineder M. Measurements on the Absolute 2-D and 3-D Localization Accuracy of TerraSAR-X. Remote Sensing. 2018; 10(4):656. https://doi.org/10.3390/rs10040656
Chicago/Turabian StyleBalss, Ulrich, Christoph Gisinger, and Michael Eineder. 2018. "Measurements on the Absolute 2-D and 3-D Localization Accuracy of TerraSAR-X" Remote Sensing 10, no. 4: 656. https://doi.org/10.3390/rs10040656
APA StyleBalss, U., Gisinger, C., & Eineder, M. (2018). Measurements on the Absolute 2-D and 3-D Localization Accuracy of TerraSAR-X. Remote Sensing, 10(4), 656. https://doi.org/10.3390/rs10040656