Identifying Flood Events over the Poyang Lake Basin Using Multiple Satellite Remote Sensing Observations, Hydrological Models and In Situ Data

 ,
, 
Abstract
:
1. Introduction
2. Study Region and Datasets
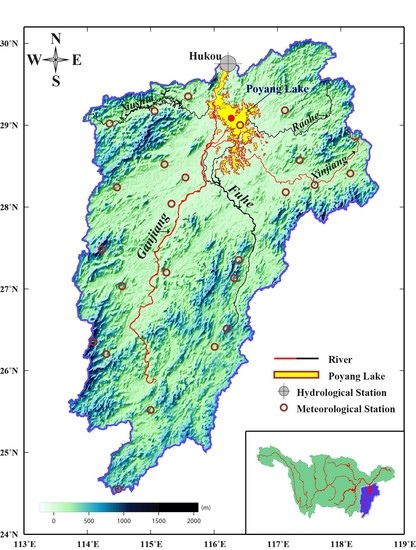
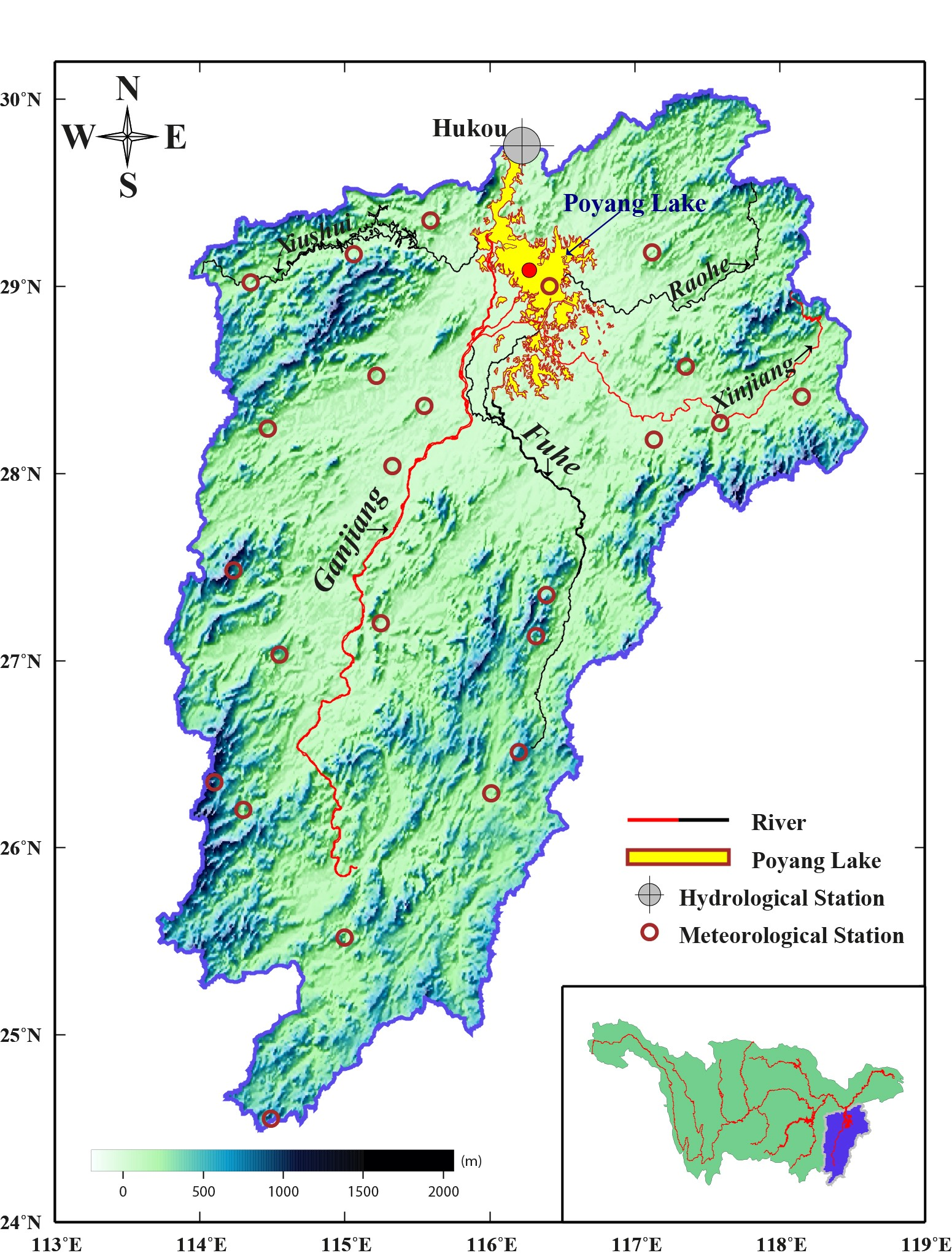
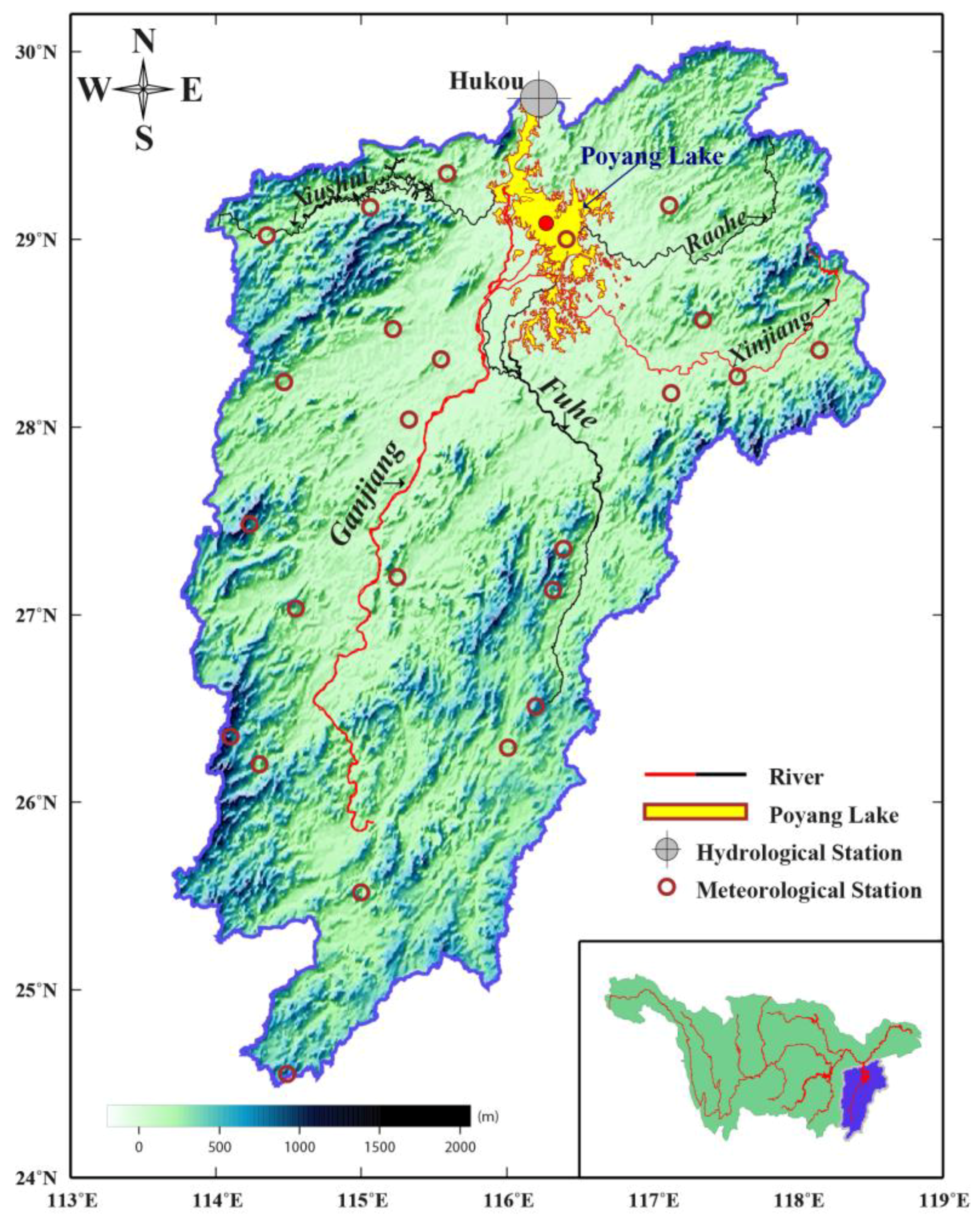
2.1. Study Region
2.2. Datasets
2.2.1. GRACE Data
2.2.2. Hydrological Models
2.2.3. MODIS Data
2.2.4. Altimetry Data
2.2.5. TRMM data
2.2.6. In Situ Data
3. GRACE Data Processing
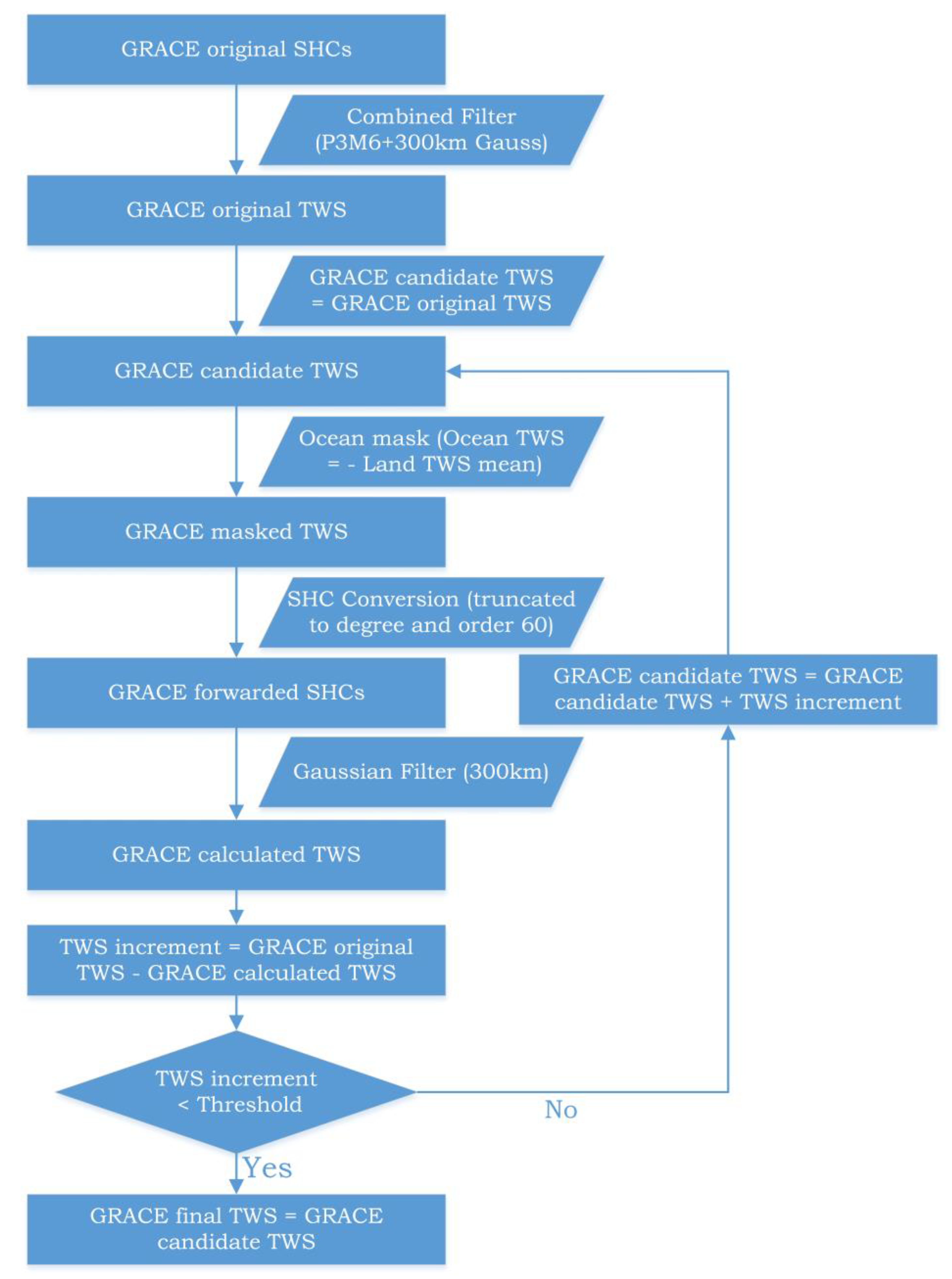
3.1. Forward-Modeling Method
- (1)
- Combined filter: As mentioned in Section 2.2.1, using the combined filter, the “GRACE original TWS” is derived from the GRACE original SHCs. The result is then set as the “GRACE candidate TWS”.
- (2)
- Ocean mask: Assuming the mass of the Earth surface is conserved, the Ocean TWS is set to the negative of the mean TWS over land. It should be noted that the land TWSs are weighted by the cosine of latitude. After applying ocean mask, the new TWS is named as “GRACE masked TWS”.
- (3)
- SHC conversion: The ”GRACE masked TWS” is then converted into SHCs within limited degrees and orders. Here, the truncated degree and order is set as 60. The new SHCs are called “GRACE forwarded SHCs”.
- (4)
- Gaussian filter: After applying Gaussian filter to “GRACE forwarded SHCs”, the “GRACE calculated TWS” is computed following Wahr et al. [41].
- (5)
- New iteration: TWS increment is equal to the difference between “GRACE original TWS” (in step 1) and “GRACE calculated TWS” (in step 4). The iteration is stopped when the TWS increments in the study region are all smaller than a pre-defined threshold. Otherwise a new iteration is performed. During the new iteration, the “GRACE candidate TWS” is updated as the sum of “GRACE candidate TWS” and “TWS increment”.
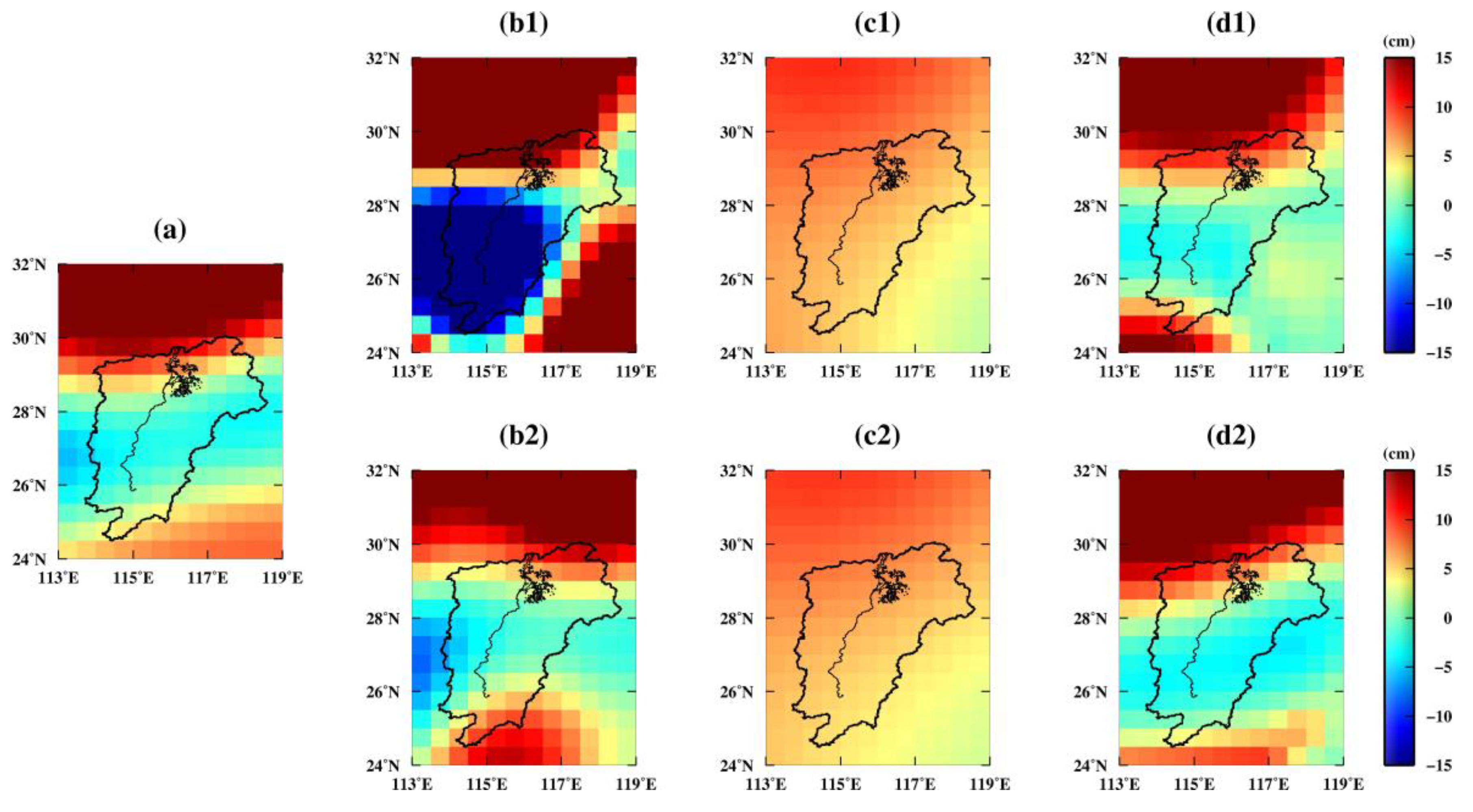
3.2. Validation of Forward-Modeling Method
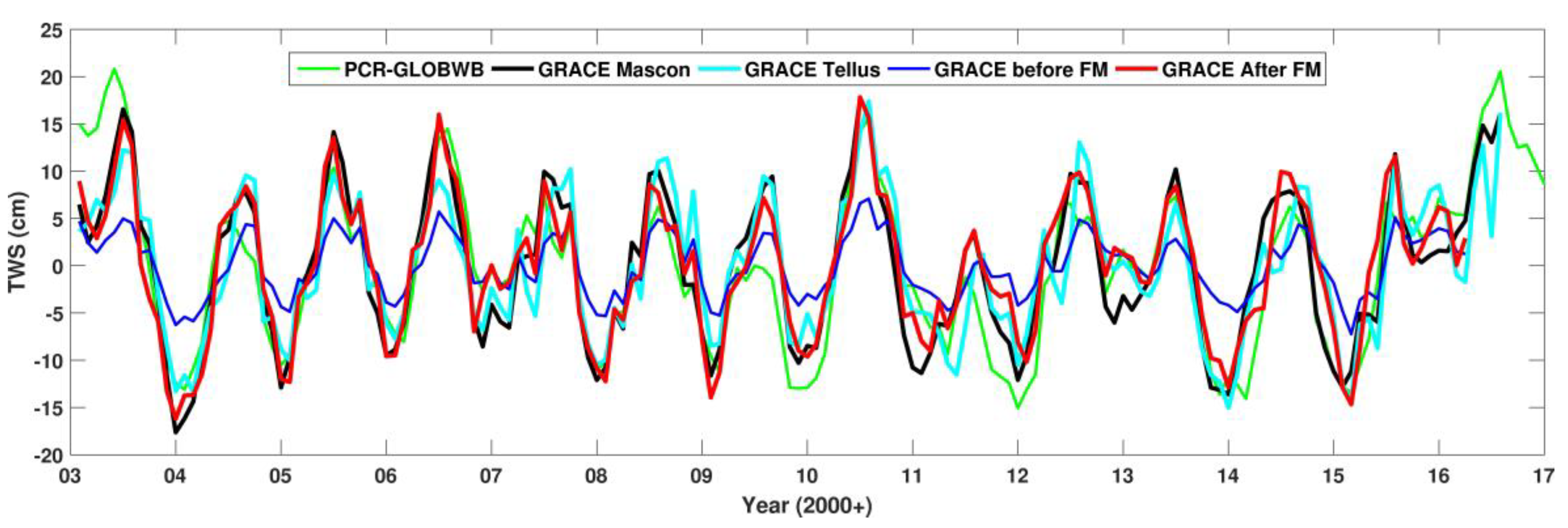
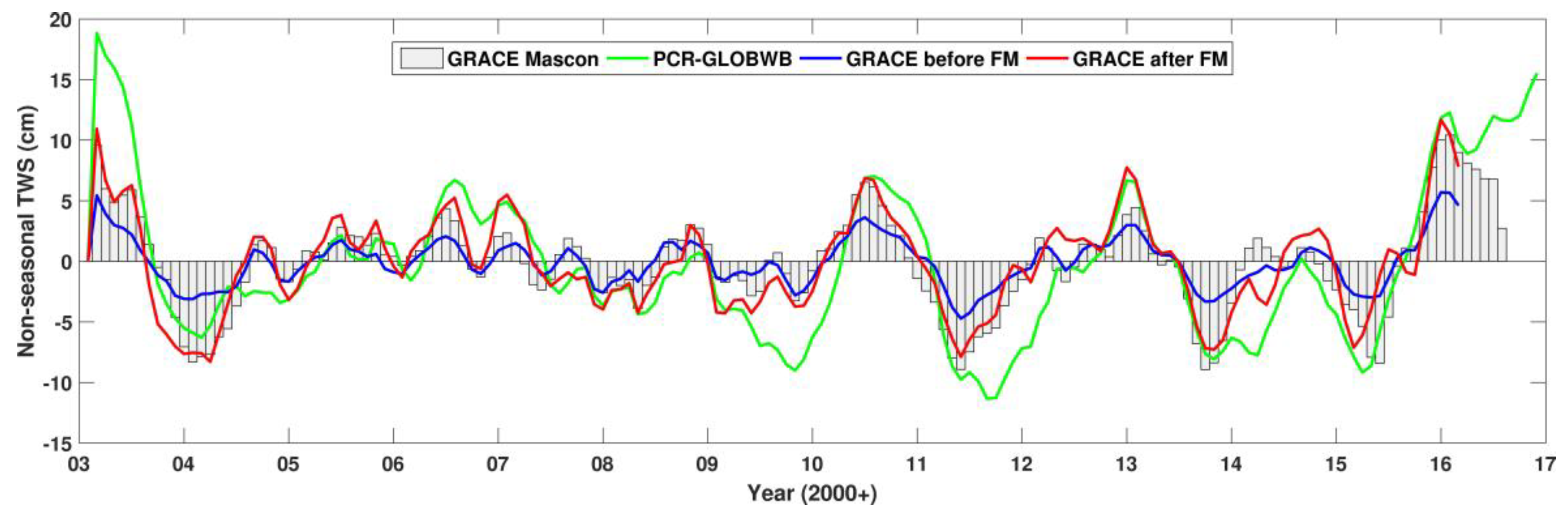
3.3. Comparison between Forward-Modeling, Mascon Grids, and Tellus Grids
4. Flood Events Identification
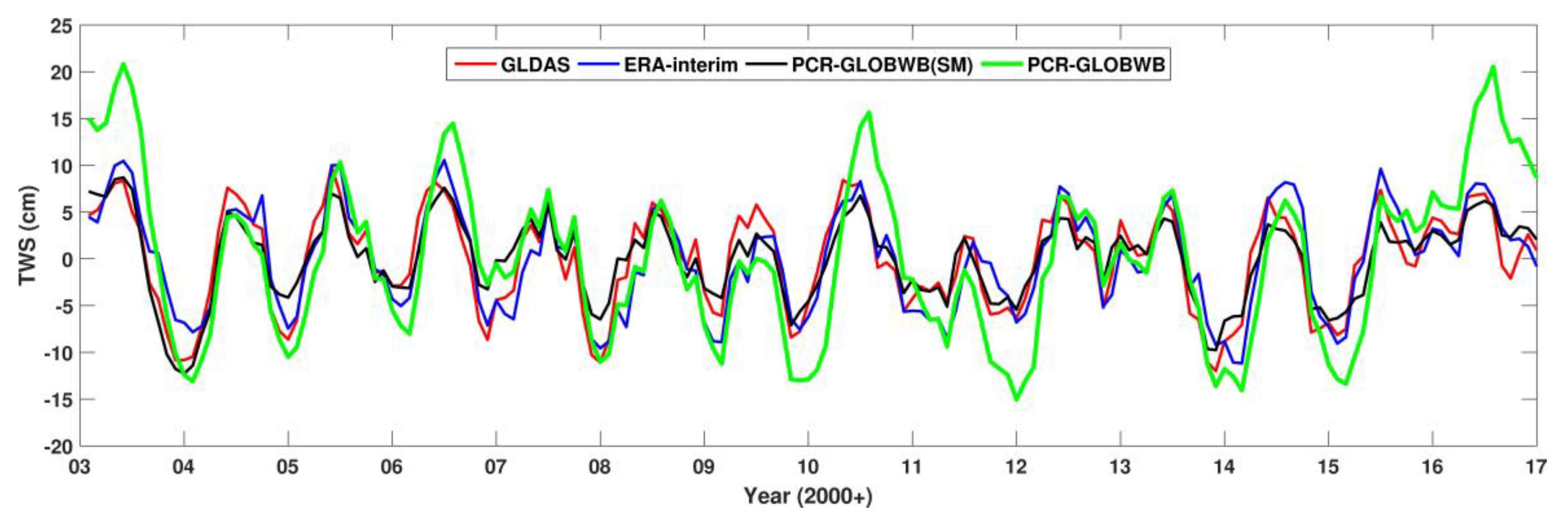
4.1. Hydrological Models
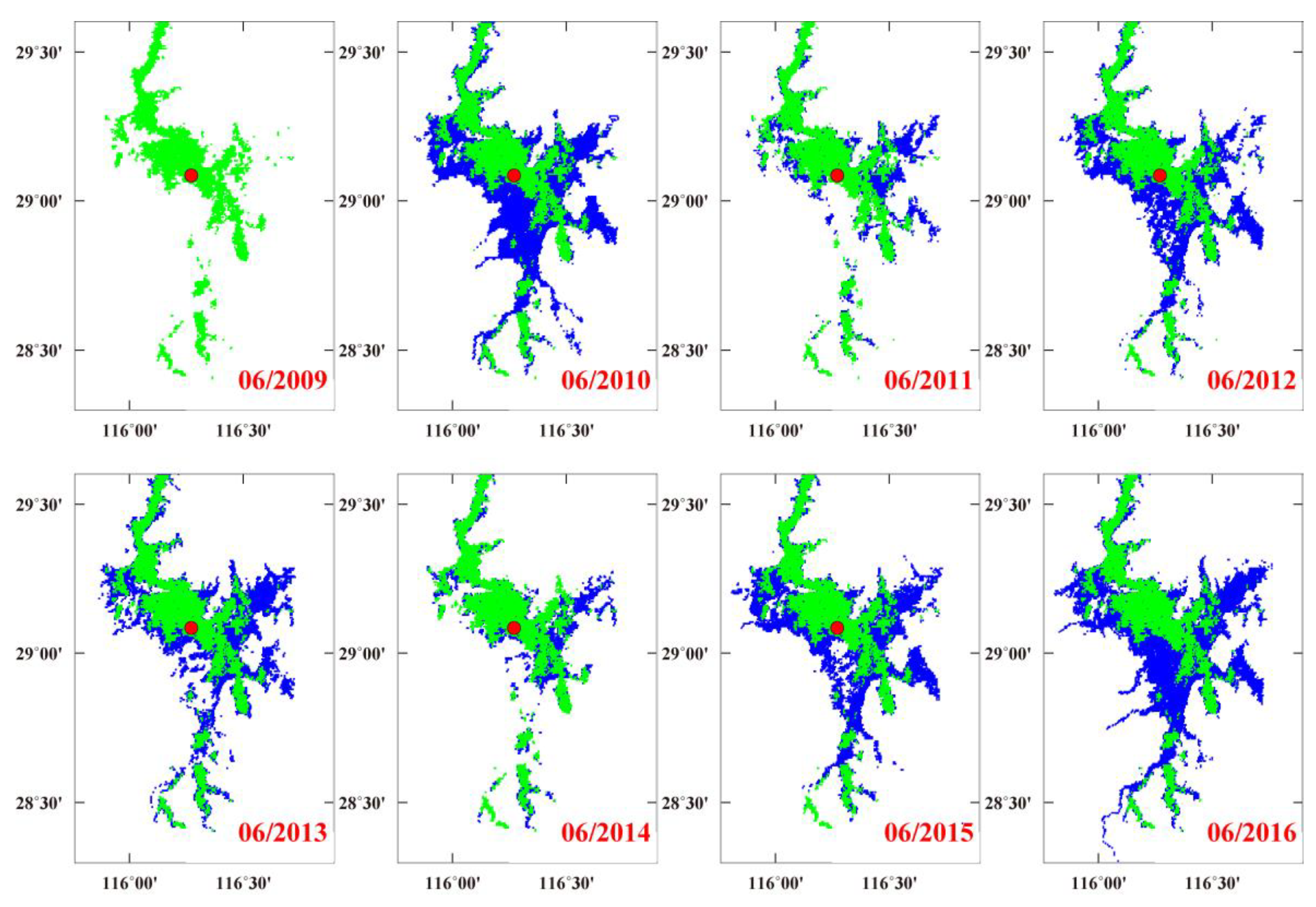
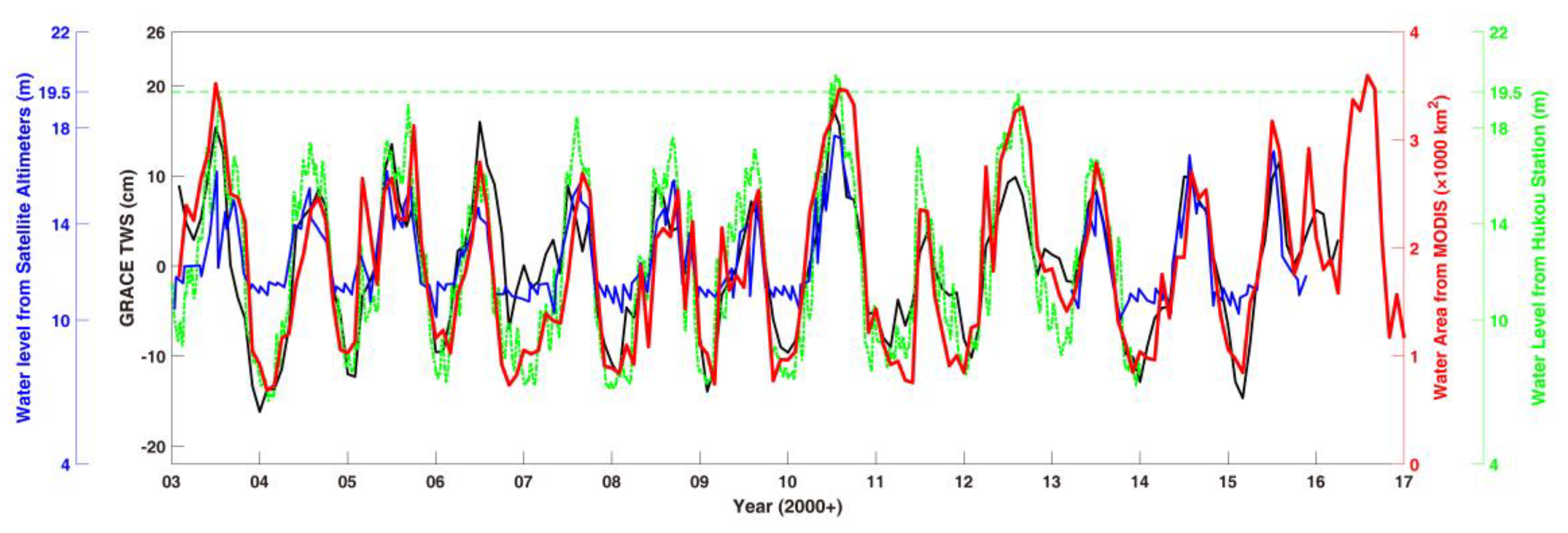
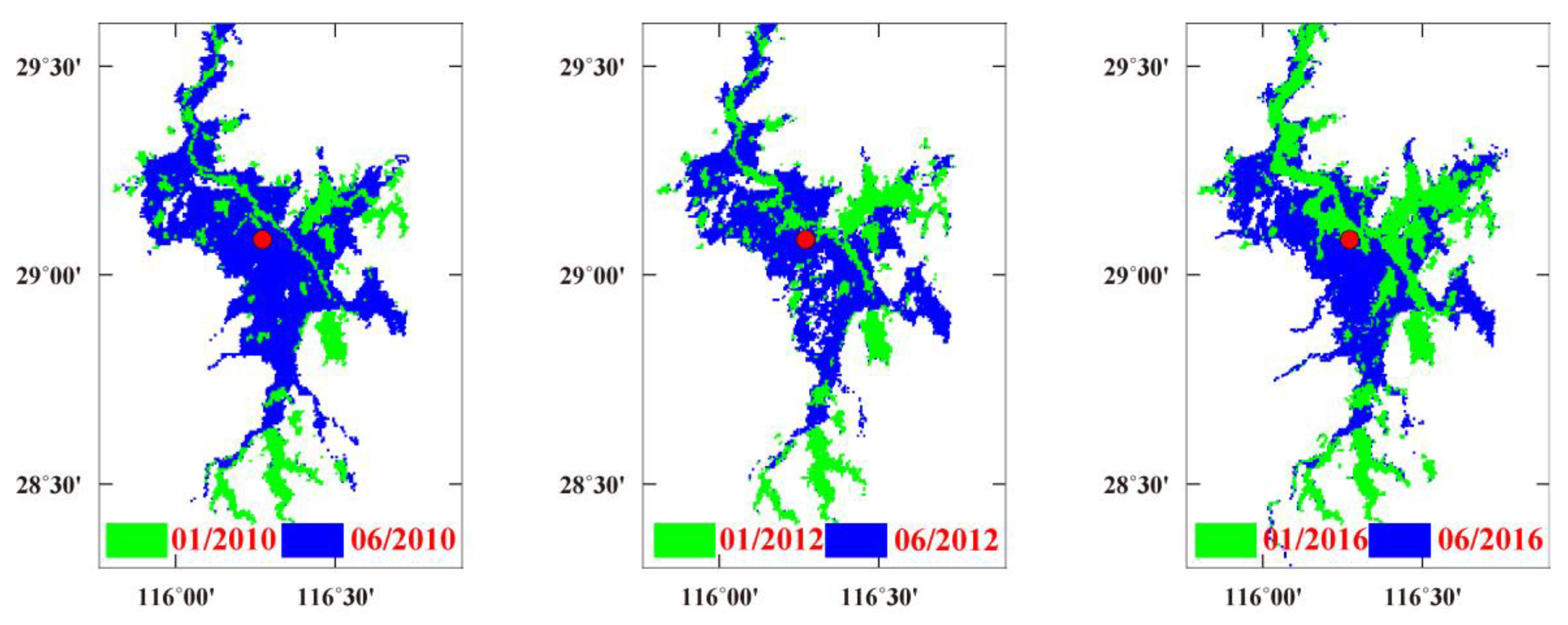
4.2. MODIS and Altimetry
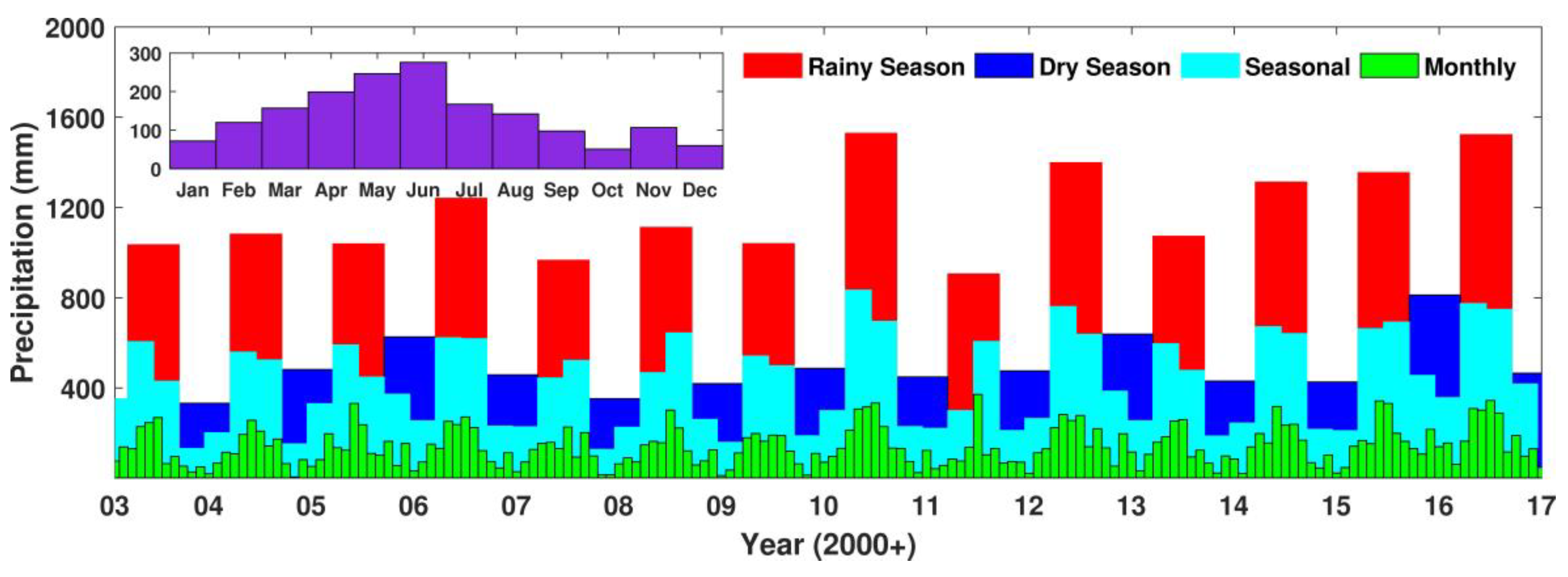
4.3. TRMM
4.4. In Situ Data
5. Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
References
- Zhang, Q.; Sun, P.; Chen, X.; Jiang, T. Hydrological extremes in the Poyang Lake basin, China: Changing properties, causes and impacts. Hydrol. Process. 2011, 25, 3121–3130. [Google Scholar] [CrossRef]
- Zhang, Z.; Chao, B.; Chen, J.; Wilson, C.R. Terrestrial water storage anomalies of Yangtze River Basin droughts observed by GRACE and connections with ENSO. Glob. Planet. Chang. 2015, 126, 35–45. [Google Scholar]
- Guo, H.; Hu, Q.; Jiang, T. Annual and seasonal streamflow responses to climate and land-cover changes in the Poyang Lake basin. China. J. Hydrol. 2008, 355, 106–122. [Google Scholar] [CrossRef]
- Li, X.; Ye, X. Spatiotemporal Characteristics of Dry-Wet Abrupt Transition Based on Precipitation in Poyang Lake Basin, China. Water 2015, 7, 1943–1958. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Chen, X.; Cai, X.; Tian, L.; Gan, W. Assessment of inundation changes of Poyang Lake using MODIS observations between 2000 and 2010. Remote Sens. Environ. 2012, 121, 80–92. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Chen, X.; Li, R.; Tian, L.; Murch, B. MODIS observations of the bottom topography and its inter-annual variability of Poyang Lake. Remote Sens. Environ. 2011, 115, 2729–2741. [Google Scholar] [CrossRef]
- Shang, H.; Jia, L.; Menenti, M. Analyzing the inundation pattern of the Poyang Lake floodplain by passive microwave data. J. Hydrometeorol. 2015, 16, 652–667. [Google Scholar] [CrossRef]
- Cai, X.; Feng, L.; Wang, Y.; Chen, X. Influence of the Three Gorges Project on the water resource components of Poyang Lake watershed: observations from TRMM and GRACE. Adv. Meteorol. 2015, 3, 1–7. [Google Scholar] [CrossRef]
- Vermote, E.F.; Kotchenova, S.Y.; Ray, J.P. MODIS Surface Reflectance User’s Guide Version 1.3. 2011. Available online: http://modis-sr.ltdri.org/guide/MOD09_UserGuide_v1_3.pdf (accessed on 5 February 2018).
- Tangdamrongsub, N.; Ditmar, P.G.; Steele-Dunne, S.C.; Gunter, B.C.; Sutanudjaja, E.H. Assessing total water storage and identifying flood events over Tonlé Sap basin in Cambodia using GRACE and MODIS satellite observations combined with hydrological models. Remote Sens. Environ. 2016, 181, 162–173. [Google Scholar] [CrossRef]
- Zhou, H.; Luo, Z.; Tangdamrongsub, N.; Wang, L.; He, L.; Xu, C.; Li, Q. Characterizing drought and flood events over the Yangtze River Basin using the HUST-Grace2016 solution and ancillary data. Remote Sens. 2017, 9, 1100. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Bosch, W.; Seitz, F. DAHITI—An innovative approach for estimating water level time series over inland waters using multi-mission satellite altimetry. Hydrol. Earth Syst. Sci. 2015, 19, 4345–4364. [Google Scholar] [CrossRef]
- Kummerow, C.; Barnes, W.; Kozu, T.; Shiue, J.; Simpson, J. The tropical rainfall measuring mission (TRMM) sensor package. J. Atmos. Ocean. Tech. 1998, 15, 809–817. [Google Scholar] [CrossRef]
- Longuevergne, L.; Wilson, C.R.; Scanlon, B.R.; Crétaux, J.F. GRACE water storage estimates for the Middle East and other regions with significant reservoir and lake storage. Hydrol. Earth Syst. Sci. 2013, 17, 4817–4830. [Google Scholar] [CrossRef] [Green Version]
- Eicker, A.; Forootan, E.; Springer, A.; Longuevergne, L.; Kusche, J. Does grace see the terrestrial water cycle “intensifying”? J. Geophys. Res. 2016, 121, 733–745. [Google Scholar] [CrossRef]
- Feng, W.; Zhong, M.; Lemoine, J.M.; Biancale, R.; Hsu, H.; Xia, J. Evaluation of groundwater depletion in north china using the gravity recovery and climate experiment (GRACE) data and ground-based measurements. Water Resour. Res. 2013, 49, 2110–2118. [Google Scholar] [CrossRef]
- Long, D.; Shen, Y.; Sun, A.; Hong, Y.; Longuevergne, L.; Yang, Y. Drought and flood monitoring for a large karst plateau in Southwest China using extended GRACE data. Remote Sens. Environ. 2014, 155, 145–160. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, C.; Gong, H.; Yeh, P.J.; Shen, Y.; Guo, Y.; Huang, Z.; Li, X. Detection of human-induced evapotranspiration using GRACE satellite observations in the Haihe River basin of China. Geophys. Res. Lett. 2016, 44, 190–199. [Google Scholar] [CrossRef]
- Tapley, B.D.; Bettadpur, S.; Ries, J.C.; Thompson, P.F.; Watkins, M.M. GRACE measurements of mass variability in the earth system. Science 2004, 305, 503–505. [Google Scholar] [CrossRef] [PubMed]
- Jekeli, C. Alternative Methods to Smooth the Earth’s Gravity Field; Scientific report, 327; School of Earth Science, The Ohio State University: Columbus, OH, USA, 1981. [Google Scholar]
- Swenson, S.C.; Wahr, J. Post-processing removal of correlated errors in GRACE data. Geophys. Res. Lett. 2006, 33, L08402. [Google Scholar] [CrossRef]
- Guo, J.Y.; Duan, X.J.; Shum, C.K. Non-isotropic Gaussian smoothing and leakage reduction for determining mass changes over land and ocean using GRACE data. Geophys. J. Int. 2010, 181, 290–302. [Google Scholar] [CrossRef]
- Long, D.; Yang, Y.; Wada, Y.; Hong, Y.; Liang, W.; Chen, Y. Deriving scaling factors using a global hydrological model to restore GRACE total water storage changes for China’s Yangtze River Basin. Remote Sens. Environ. 2015, 168, 177–193. [Google Scholar] [CrossRef]
- Zhou, H.; Luo, Z.; Wu, Y.; Li, Q.; Xu, C. Impact of geophysical model error for recovering temporal gravity field model. J. Appl. Geophys. 2016, 130, 177–185. [Google Scholar] [CrossRef]
- Chen, J.L.; Famiglietti, J.S.; Scanlon, B.; Rodell, M. Groundwater storage changes: present status from GRACE observations. Surv. Geophys. 2016, 37, 397–417. [Google Scholar] [CrossRef]
- Chen, J.L.; Li, J.; Zhang, Z.; Ni, S. Long-term groundwater variations in Northwest India from satellite gravity measurements. Global Planet. Chang. 2014, 116, 130–138. [Google Scholar] [CrossRef]
- Chen, J.L.; Wilson, C.R.; Tapley, B.D. Contribution of ice sheet and mountain glacier melt to recent sea level rise. Nat. Geosci. 2013, 6, 549–552. [Google Scholar] [CrossRef]
- Jin, S.; Zou, F. Re-estimation of glacier mass loss in Greenland from GRACE with correction of land-ocean leakage effects. Global Planet. Chang. 2015, 135, 170–178. [Google Scholar] [CrossRef]
- Wu, Y.; Li, H.; Zou, Z.B. Investigation of water storage variation in the Heihe River using the Forward-Modeling method. Chin. J. Geophys. 2015, 58, 3507–3516. [Google Scholar]
- Chen, J.L.; Wilson, C.R.; Li, J.; Zhang, Z. Reducing leakage error in grace-observed long-term ice mass change: A case study in west Antarctica. J. Geod. 2015, 89, 925–940. [Google Scholar] [CrossRef]
- Landerer, F.W.; Swenson, S.C. Accuracy of scaled GRACE terrestrial water storage estimates. Water Resour. Res. 2012, 48, W04531. [Google Scholar] [CrossRef]
- Save, H.; Bettadpur, S.; Tapley, B.D. High-resolution CSR GRACE RL05 mascons. J. Geophys. Res. 2016, 121, 7547–7569. [Google Scholar] [CrossRef]
- Rodell, M.; Houser, P.; Jambor, U.E.A.; Gottschalck, J.; Mitchell, K.; Meng, C. The global land data assimilation system. Bull. Am. Meteorol. Soc. 2004, 85, 381–394. [Google Scholar] [CrossRef]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S. The ERA-interim reanalysis: Configuration and performance of the data assimilation system. Q. J. Roy. Mmteor. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Wada, Y.; Wisser, D.; Bierkens, M.F.P. Global modeling of withdrawal, allocation and consumptive use of surface water and groundwater resources. Earth Syst. Dynam. 2014, 5, 15–40. [Google Scholar] [CrossRef]
- Tangdamrongsub, N.; Steele-Dunne, S.C.; Gunter, B.C.; Ditmar, P.G.; Sutanudjaja, E.H.; Sun, Y. Improving estimates of water resources in a semi-arid region by assimilating GRACE data into the PCR-GLOBWB hydrological model. Hydrol. Earth Syst. Sci. 2017, 21, 2053–2074. [Google Scholar] [CrossRef]
- Bettadpur, S. Gravity Recovery and Climate Experiment UTCSR Level-2 Processing Standards Document for Level-2 Product Release 0005; Center for Space Research, University of Texas: Austin, TX, USA, 2012. [Google Scholar]
- Zhou, H.; Luo, Z.; Zhou, Z.; Zhong, B.; Hsu, H. HUST-Grace2016s: A new GRACE static gravity field model derived from a modified dynamic approach over a 13-year observation period. Adv. Space Res. 2017, 60, 597–611. [Google Scholar] [CrossRef]
- Swenson, S.C.; Chambers, D.; Wahr, J. Estimating geocenter variations from a combination of GRACE and ocean model output. J. Geophys. Res. 2008, 113, B08410. [Google Scholar] [CrossRef]
- Cheng, M.; Tapley, B. Variations in the Earth’s oblateness during the past 28 years. J. Geophys. Res. 2004, 109, B09402. [Google Scholar] [CrossRef]
- Wahr, J.; Molenaar, M.; Bryan, F. Time variability of the Earth’s gravity field: Hydrological and oceanic effects and their possible detection using GRACE. J. Geophys. Res. 1998, 103, 30205–30229. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T. TRMM and Other Data Precipitation Data Set Documentation. Technical report; 2017. Available online: https://pmm.nasa.gov/sites/default/files/document_files/3B42_3B43_doc_V7_4_19_17.pdf (accessed on 5 February 2018).
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Riegber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophys. Res. Lett. 2004, 31, L06619. [Google Scholar] [CrossRef]
- Flechtner, F.; Morton, P.; Watkins, M.; Webb, F. Status of the GRACE Follow-on Mission. IAG Symposium Gravity, Geoid, and Height Systems; Springer: Venice, Italy, 2014. [Google Scholar]
- Yao, C.; Luo, Z.; Wang, H.; Li, Q.; Zhou, H. GRACE-derived terrestrial water storage changes in the inter-basin region and its possible influencing factors: A case study of the Sichuan Basin, China. Remote Sens. 2016, 8, 444. [Google Scholar] [CrossRef]
- Scanlon, B.R.; Zhang, Z.; Save, H.; Sun, A.Y.; Schmied, H.M.; Beek, L.P.H.V.; Wiese, D.N.; Wada, Y.; Long, D.; Reedy, R.C.; et al. Global models underestimate large decadal declining and rising water storage trends relative to grace satellite data. Proc. Natl. Acad. Sci. USA 2018, 115, E1080–E1089. [Google Scholar] [CrossRef] [PubMed]
- Scanlon, B.R.; Zhang, Z.; Save, H.; Wiese, D.N.; Landerer, F.W.; Long, D.; Chen, J.; Longuevergne, L. Global evaluation of new GRACE mascon products for hydrologic applications. Water Resour. Res. 2016, 52, 9412–9429. [Google Scholar] [CrossRef]
- Wiese, D.N.; Landerer, F.W.; Watkins, M.M. Quantifying and reducing leakage errors in the JPL RL05M GRACE mascon solution. Water Resour. Res. 2016, 52, 7490–7502. [Google Scholar] [CrossRef]
- Long, D.; Longuevergne, L.; Scanlon, B.R. Global analysis of approaches for deriving total water storage changes from GRACE satellites. Water Resour. Res. 2015, 51, 2574–2594. [Google Scholar] [CrossRef] [Green Version]
- Long, D.; Pan, Y.; Zhou, J.; Chen, Y.; Hou, X.; Hong, Y.; Scanlon, B.R.; Longuevergne, L. Global analysis of spatiotemporal variability in merged total water storage changes using multiple GRACE products and global hydrological models. Remote Sens. Environ. 2017, 192, 198–216. [Google Scholar] [CrossRef]
- Reager, J.; Thomas, B.; Famiglietti, J. River basin flood potential inferred using GRACE gravity observations at several months lead time. Nat. Geosci. 2014, 7, 588–592. [Google Scholar] [CrossRef]
- Sun, A.Y.; Scanlon, B.R.; AghaKouchak, A.; Zhang, Z. Using GRACE Satellite gravimetry for assessing large-scale hydrologic extremes. Remote Sens. 2017, 9, 1287. [Google Scholar] [CrossRef]
- Normandin, C.; Frappart, F.; Lubac, B.; Bélanger, S.; Marieu, V.; Blarel, F.; Guiastrennec-Faugas, L. Quantification of surface water volume changes in the Mackenzie Delta using satellite multi-mission data. Hydrol. Earth Syst. Sci. 2018, 22, 1543. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation force models | True World | Reference World |
|---|---|---|
| Static gravity field model | EIGEN-6C4 | GO_CON_GCF_2_DIR_R5 |
| Temporal gravity field model | GLDAS | None |
| Ocean tide model | EOT11a | EOT08a |
| Non-tidal model | AOD1B RL05 | AOD1B RL04 |
| Simulation Strategies~Strategy 1 (Current GRACE-type Mission) | ||
| Orbit noise | 2 cm | None |
| Range rate noise | 2.5 × 10−7 m/s | None |
| Simulation Strategies~Strategy 2 (Future GRACE-type Mission) | ||
| Orbit noise | 2 cm | None |
| Range rate noise | 5.0 × 10−8 m/s | None |
| Annual Amplitude | Annual Phase | Correlation Coefficients w.r.t. PCR-GLOBWB | Correlation Coefficients w.r.t. GRACE after FM | |
|---|---|---|---|---|
| GRACE before FM | 3.34 ± 0.38 | 0.91 ± 0.13 | 0.73 | 0.91 |
| GRACE after FM | 7.05 ± 0.79 | 0.80 ± 0.06 | 0.78 | - |
| GRACE Tellus | 6.51 ± 0.72 | 0.72 ± 0.07 | 0.68 | 0.80 |
| GRACE Mascon | 9.20 ± 1.02 | 0.79 ± 0.05 | 0.72 | 0.93 |
| GLDAS-Noah | 5.58 ± 0.61 | 0.62 ± 0.07 | 0.70 | 0.79 |
| ERA-Interim | 5.69 ± 0.62 | 0.59 ± 0.07 | 0.68 | 0.88 |
| PCR-GLOBWB(SM) | 3.97 ± 0.43 | 0.76 ± 0.05 | 0.75 | 0.70 |
| PCR-GLOBWB | 7.14 ± 0.78 | 0.82 ± 0.06 | - | 0.78 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Luo, Z.; Tangdamrongsub, N.; Zhou, Z.; He, L.; Xu, C.; Li, Q.; Wu, Y. Identifying Flood Events over the Poyang Lake Basin Using Multiple Satellite Remote Sensing Observations, Hydrological Models and In Situ Data. Remote Sens. 2018, 10, 713. https://doi.org/10.3390/rs10050713
Zhou H, Luo Z, Tangdamrongsub N, Zhou Z, He L, Xu C, Li Q, Wu Y. Identifying Flood Events over the Poyang Lake Basin Using Multiple Satellite Remote Sensing Observations, Hydrological Models and In Situ Data. Remote Sensing. 2018; 10(5):713. https://doi.org/10.3390/rs10050713
Chicago/Turabian StyleZhou, Hao, Zhicai Luo, Natthachet Tangdamrongsub, Zebing Zhou, Lijie He, Chuang Xu, Qiong Li, and Yunlong Wu. 2018. "Identifying Flood Events over the Poyang Lake Basin Using Multiple Satellite Remote Sensing Observations, Hydrological Models and In Situ Data" Remote Sensing 10, no. 5: 713. https://doi.org/10.3390/rs10050713
APA StyleZhou, H., Luo, Z., Tangdamrongsub, N., Zhou, Z., He, L., Xu, C., Li, Q., & Wu, Y. (2018). Identifying Flood Events over the Poyang Lake Basin Using Multiple Satellite Remote Sensing Observations, Hydrological Models and In Situ Data. Remote Sensing, 10(5), 713. https://doi.org/10.3390/rs10050713