An Enhanced Linear Spatio-Temporal Fusion Method for Blending Landsat and MODIS Data to Synthesize Landsat-Like Imagery



Abstract
:
1. Introduction
2. Methods
2.1. Theoretical Basis of the ELSTFM
2.2. The Similar Pixels Determination and Weights Computation
2.3. The Residuals Computation
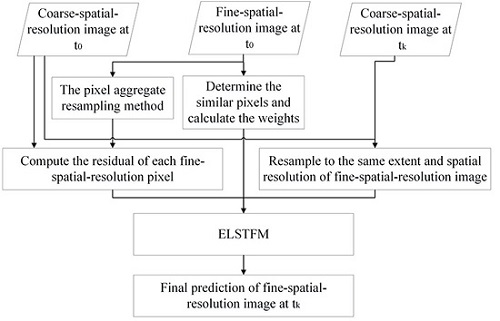
2.4. Implementation Process of ELSTFM
3. Experiments
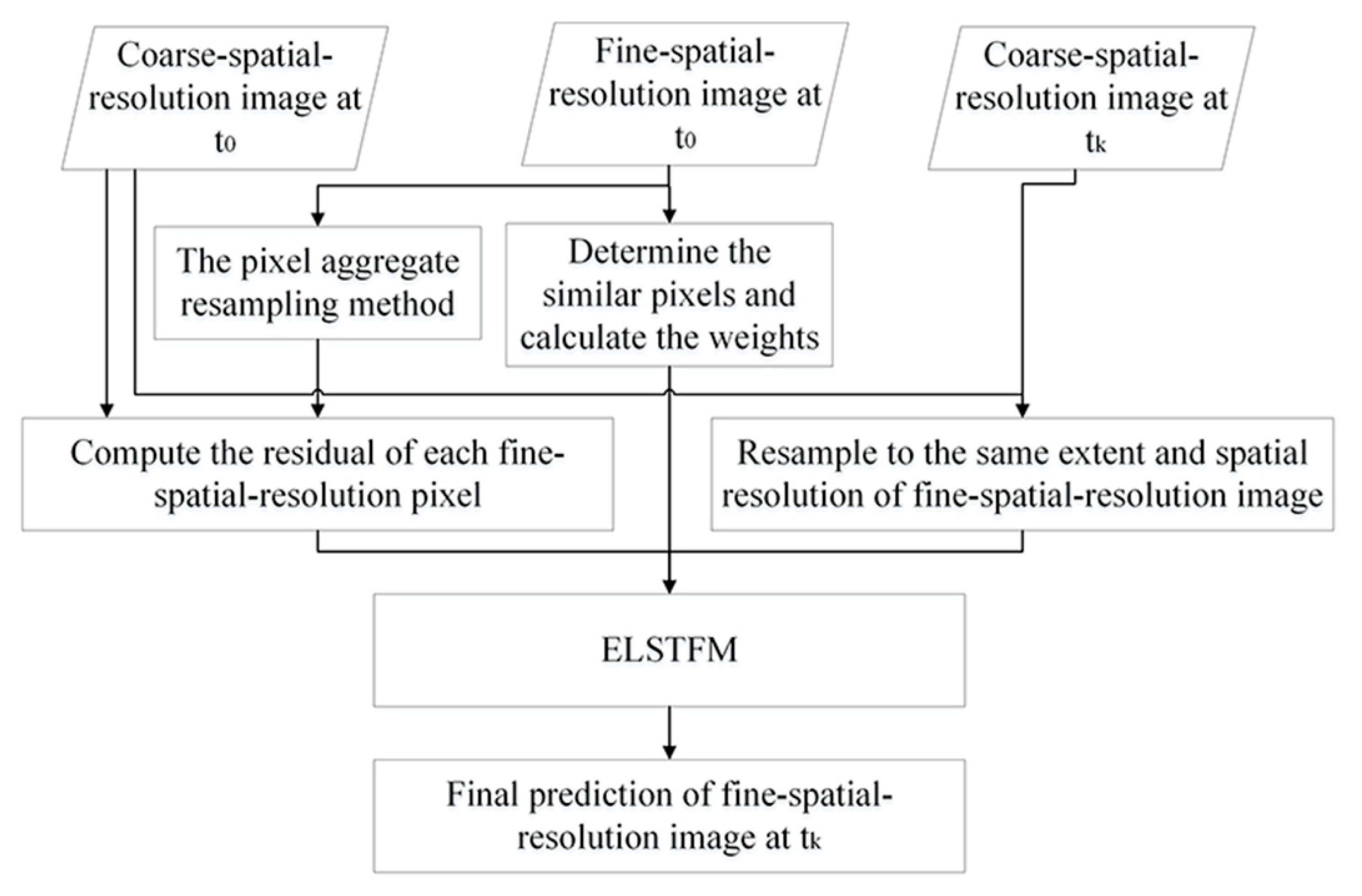
3.1. Experimental Data and Pre-Processing
3.2. Quantitative Comparison
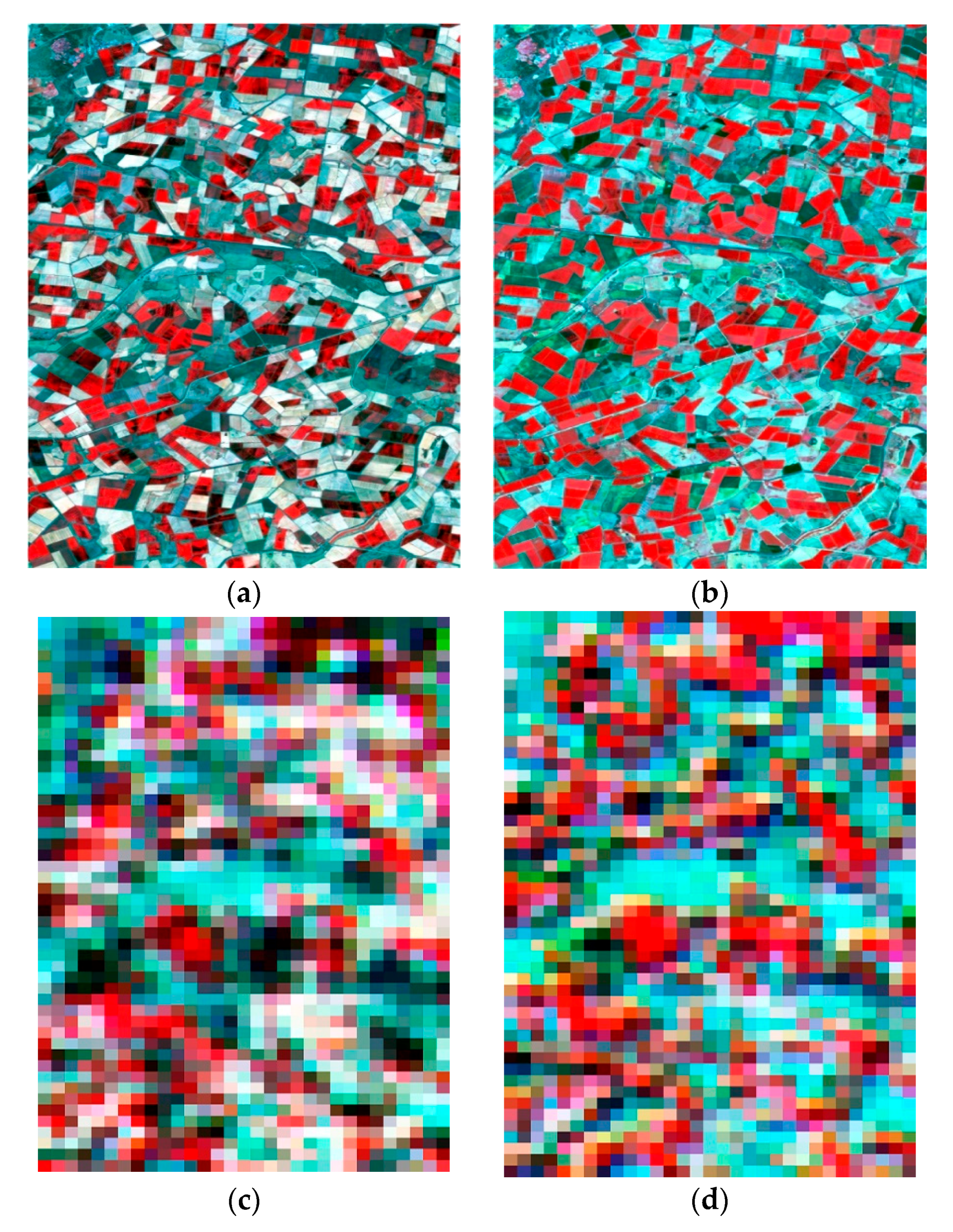
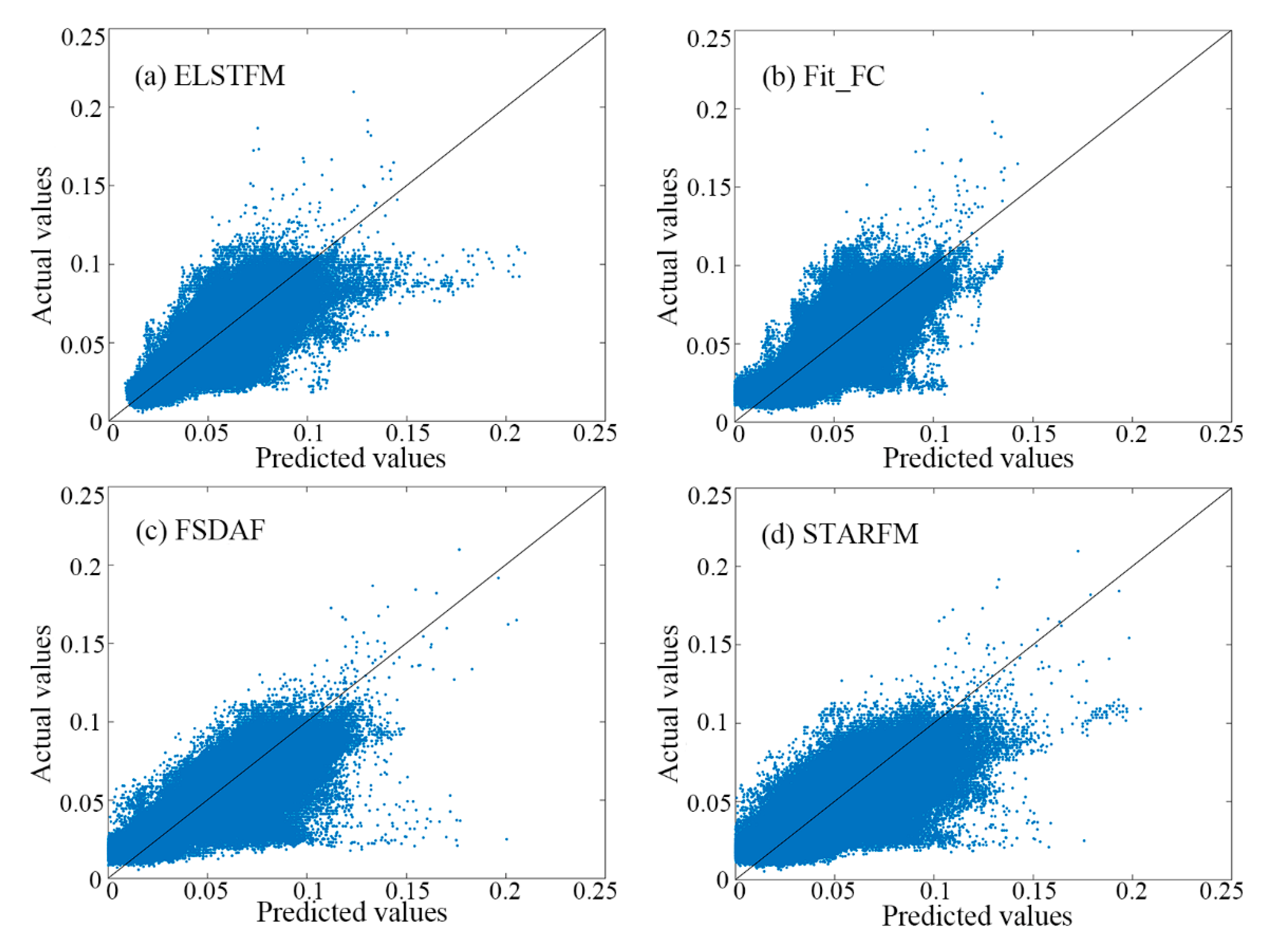
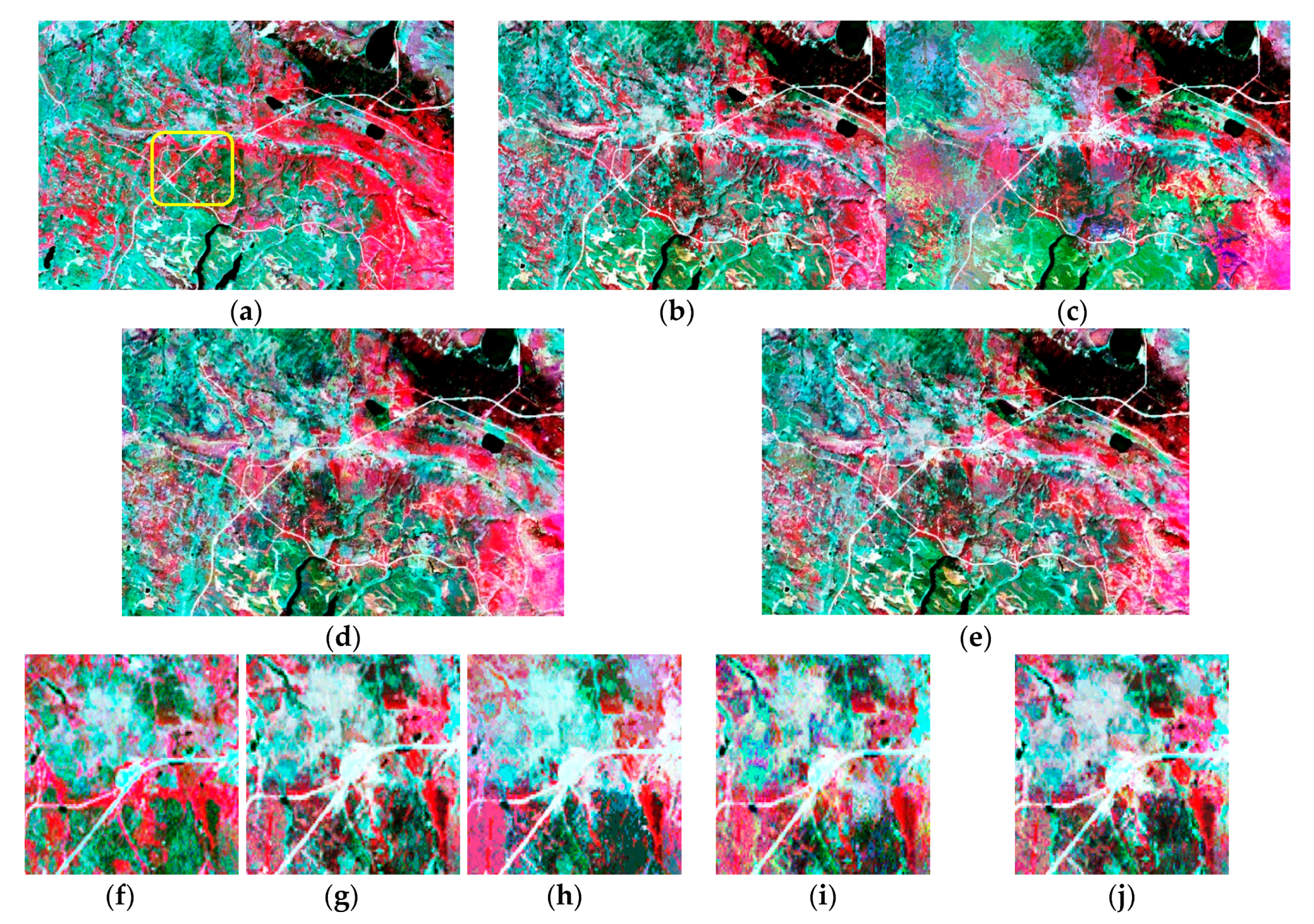
3.3. Results for Experimental Site 1
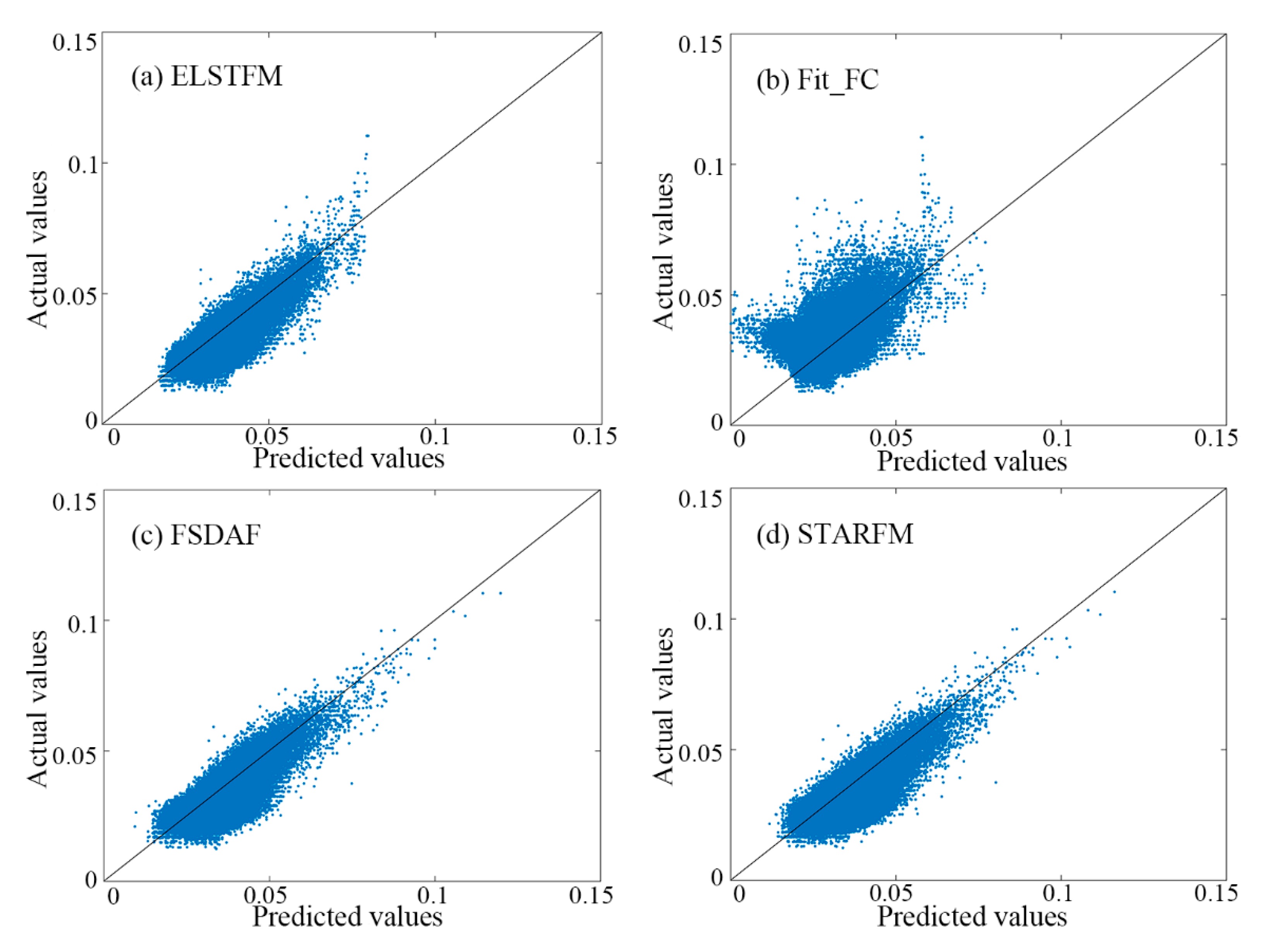
3.4. Results for Experimental Site 2
4. Discussion
4.1. The Influences of the Resampling Algorithm
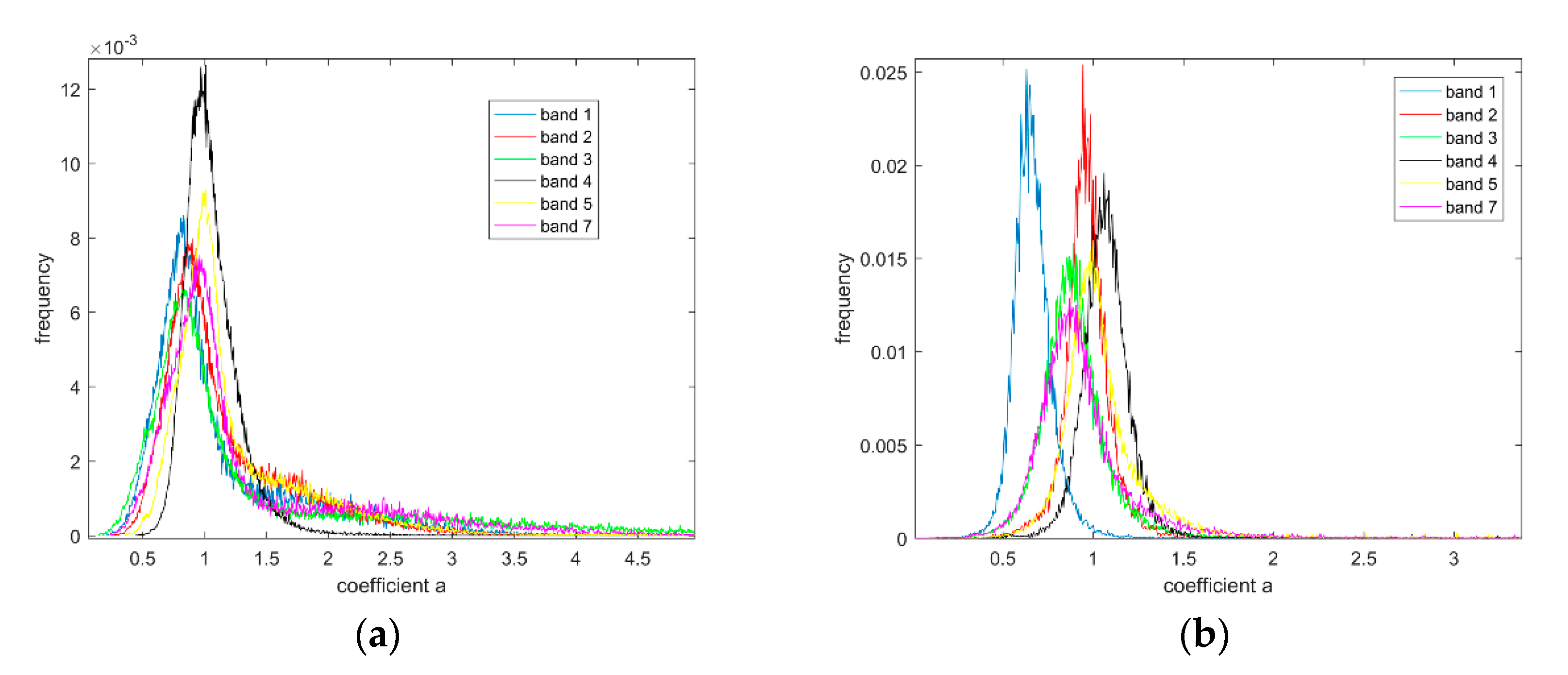
4.2. The Distributions of Slopes in ELSTFM
4.3. The Applicability of ELSTFM
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Du, P.J.; Liu, S.C.; Xia, J.S.; Zhao, Y.D. Information fusion techniques for change detection from multi-temporal remote sensing images. Inf. Fusion 2013, 14, 19–27. [Google Scholar] [CrossRef]
- Fu, D.J.; Chen, B.Z.; Zhang, H.F.; Wang, J.; Black, T.A.; Amiro, B.D.; Bohrer, G.; Bolstad, P.; Coulter, R.; Rahman, A.F.; et al. Estimating landscape net ecosystem exchange at high spatial-temporal resolution based on Landsat data, an improved upscaling model framework, and eddy covariance flux measurements. Remote Sens. Environ. 2014, 141, 90–104. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.C.; Zhao, Y.Y.; Liang, L.; Niu, Z.G.; Huang, X.M.; Fu, H.H.; Liu, S.; et al. Fine resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Jia, K.; Liang, S.L.; Zhang, N.; Wei, X.Q.; Gu, X.F.; Zhao, X.; Yao, Y.J.; Xie, X.H. Land cover classification of finer resolution remote sensing data integrating temporal features from time series coarser resolution data. ISPRS J. Photogramm. Remote Sens. 2014, 93, 49–55. [Google Scholar] [CrossRef]
- Leckie, D.G. Advances in remote-sensing technologies for forest surveys and management. Can. J. For. Res. 1990, 20, 464–483. [Google Scholar] [CrossRef]
- Asner, G.P. Cloud cover in Landsat observations of the Brazilian Amazon. Int. J. Remote Sens. 2001, 22, 3855–3862. [Google Scholar] [CrossRef]
- Carrao, H.; Goncalves, P.; Caetano, M. Contribution of multispectral and multiternporal information from MODIS images to land cover classification. Remote Sens. Environ. 2008, 112, 986–997. [Google Scholar] [CrossRef]
- Kim, Y.; Kimball, J.S.; Didan, K.; Henebry, G.M. Response of vegetation growth and productivity to spring climate indicators in the conterminous United States derived from satellite remote sensing data fusion. Agric. For. Meteorol. 2014, 194, 132–143. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Schull, M.; Turral, H. Ganges and Indus river basin land use/land cover (LULC) and irrigated area mapping using continuous streams of MODIS data. Remote Sens. Environ. 2005, 95, 317–341. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, R.; Zhang, B.; Tong, Q.X. Land cover classification of the North China Plain using MODIS_EVI time series. ISPRS J. Photogramm. Remote Sens. 2008, 63, 476–484. [Google Scholar] [CrossRef]
- Zhu, X.L.; Chen, J.; Gao, F.; Chen, X.H.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Wang, Q.M.; Atkinson, P.M. Spatio-temporal fusion for daily Sentinel-2 images. Remote Sens. Environ. 2018, 204, 31–42. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Linke, J.; McDermid, G.; Masek, J.G.; Gao, F.; White, J.C. A new data fusion model for high spatial- and temporal-resolution mapping of forest disturbance based on Landsat and MODIS. Remote Sens. Environ. 2009, 113, 1613–1627. [Google Scholar] [CrossRef]
- Dong, T.F.; Liu, J.G.; Qian, B.D.; Zhao, T.; Jing, Q.; Geng, X.Y.; Wang, J.F.; Huffman, T.; Shang, J.L. Estimating winter wheat biomass by assimilating leaf area index derived from fusion of Landsat-8 and MODIS data. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 63–74. [Google Scholar] [CrossRef]
- Shen, H.F.; Huang, L.W.; Zhang, L.P.; Wu, P.H.; Zeng, C. Long-term and fine-scale satellite monitoring of the urban heat island effect by the fusion of multi-temporal and multi-sensor remote sensed data: A 26-year case study of the city of Wuhan in China. Remote Sens. Environ. 2016, 172, 109–125. [Google Scholar] [CrossRef]
- Weng, Q.H.; Fu, P.; Gao, F. Generating daily land surface temperature at Landsat resolution by fusing Landsat and MODIS data. Remote Sens. Environ. 2014, 145, 55–67. [Google Scholar] [CrossRef]
- Zhu, L.K.; Radeloff, V.C.; Ives, A.R. Improving the mapping of crop types in the Midwestern U.S. by fusing Landsat and MODIS satellite data. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 1–11. [Google Scholar] [CrossRef]
- Gao, F.; Hilker, T.; Zhu, X.; Anderson, M.; Masek, J.G.; Wang, P.; Yang, Y. Fusing Landsat and MODIS data for vegetation monitoring. IEEE Geosci. Remote Sens. Mag. 2015, 3, 47–60. [Google Scholar] [CrossRef]
- Gao, F.; Anderson, M.C.; Zhang, X.Y.; Yang, Z.W.; Alfieri, J.G.; Kustas, W.P.; Mueller, R.; Johnson, D.M.; Prueger, J.H. Toward mapping crop progress at field scales through fusion of Landsat and MODIS imagery. Remote Sens. Environ. 2017, 188, 9–25. [Google Scholar] [CrossRef]
- Kong, F.J.; Li, X.B.; Wang, H.; Xie, D.F.; Li, X.; Bai, Y.X. Land Cover Classification Based on Fused Data from GF-1 and MODIS NDVI Time Series. Remote Sens. 2016, 8, 741. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Zhang, S.Q.; Li, L.Y.; Shi, K.F.; Liu, R. Surface water mapping from Suomi NPP-VIIRS imagery at 30 m resolution via blending with Landsat data. Remote Sens. 2016, 8, 631. [Google Scholar] [CrossRef]
- Cheng, Q.; Liu, H.Q.; Shen, H.F.; Wu, P.H.; Zhang, L.P. A spatial and temporal nonlocal filter-based data fusion method. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4476–4488. [Google Scholar] [CrossRef]
- Zurita-Milla, R.; Kaiser, G.; Clevers, J.G.P.W.; Schneider, W.; Schaepman, M.E. Downscaling time series of MERIS full resolution data to monitor vegetation seasonal dynamics. Remote Sens. Environ. 2009, 113, 1874–1885. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Garcia-Haro, F.J. A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion. Remote Sens. Environ. 2015, 156, 34–44. [Google Scholar] [CrossRef]
- Xie, D.F.; Zhang, J.S.; Zhu, X.F.; Pan, Y.Z.; Liu, H.L.; Yuan, Z.M.Q.; Yun, Y. An Improved STARFM with help of an unmixing-based method to generate high spatial and temporal resolution remote sensing data in complex heterogeneous regions. Sensors 2016, 16, 207. [Google Scholar] [CrossRef] [PubMed]
- Wu, M.Q.; Niu, Z.; Wang, C.Y.; Wu, C.Y.; Wang, L. Use of MODIS and Landsat time series data to generate high-resolution temporal synthetic Landsat data using a spatial and temporal reflectance fusion model. J. Appl. Remote Sens. 2012, 6. [Google Scholar] [CrossRef]
- Wu, M.Q.; Wu, C.Y.; Huang, W.J.; Niu, Z.; Wang, C.Y.; Li, W.; Hao, P.Y. An improved high spatial and temporal data fusion approach for combining Landsat and MODIS data to generate daily synthetic Landsat imagery. Inf. Fusion 2016, 31, 14–25. [Google Scholar] [CrossRef]
- Zhu, X.L.; Helmer, E.H.; Gao, F.; Liu, D.S.; Chen, J.; Lefsky, M.A. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Rao, Y.H.; Zhu, X.L.; Chen, J.; Wang, J.M. An Improved Method for Producing High Spatial-Resolution NDVI Time Series Datasets with Multi-Temporal MODIS NDVI Data and Landsat TM/ETM plus Images. Remote Sens. 2015, 7, 7865–7891. [Google Scholar] [CrossRef]
- Wu, M.Q.; Huang, W.J.; Niu, Z.; Wang, C.Y.; Li, W.; Yu, B. Validation of synthetic daily Landsat NDVI time series data generated by the improved spatial and temporal data fusion approach. Inf. Fusion 2018, 40, 34–44. [Google Scholar] [CrossRef]
- Amorós-López, J.; Gómez-Chova, L.; Alonso, L.; Guanter, L.; Zurita-Milla, R.; Moreno, J.; Camps-Valls, G. Multitemporal fusion of Landsat/TM and ENVISAT/MERIS for crop monitoring. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 132–141. [Google Scholar] [CrossRef]
- Huang, B.; Song, H. Spatiotemporal reflectance fusion via sparse representation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3707–3716. [Google Scholar] [CrossRef]
- Song, H.; Huang, B. Spatiotemporal satellite image fusion through one-pair image learning. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1883–1896. [Google Scholar] [CrossRef]
- Liu, X.; Deng, C.; Wang, S.; Huang, G.; Zhao, B.; Lauren, P. Fast and accurate spatiotemporal fusion based upon extreme learning machine. IEEE Geosci. Remote Sens. Lett. 2016, 13, 2039–2043. [Google Scholar] [CrossRef]
- Das, M.; Ghosh, S.K. Deep-STEP: A deep learning approach for spatiotemporal prediction of remote sensing data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1984–1988. [Google Scholar] [CrossRef]
- Emelyanova, I.V.; McVicar, T.R.; Van Niel, T.G.; Li, L.T.; van Dijk, A.I.J.M. Assessing the accuracy of blending Landsat-MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics: A framework for algorithm selection. Remote Sens. Environ. 2013, 133, 193–209. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Landsat-7/ETM+ Band | Landsat-7/ETM+ Bandwidth (nm) | MODIS Band | MODIS Bandwidth (nm) |
|---|---|---|---|
| 1 | 450–520 | 3 | 459–479 |
| 2 | 530–610 | 4 | 545–565 |
| 3 | 630–690 | 1 | 620–670 |
| 4 | 780–900 | 2 | 841–876 |
| 5 | 1550–1750 | 6 | 1628–1652 |
| 7 | 2090–2350 | 7 | 2105–2155 |
| Band 1 | Band 2 | Band 3 | Band 4 | Band 5 | Band 7 | ||
|---|---|---|---|---|---|---|---|
| ɤ | ELSTFM | 0.8769 | 0.8331 | 0.8721 | 0.5786 | 0.8983 | 0.8971 |
| Fit_FC | 0.8569 | 0.7870 | 0.8456 | 0.3787 | 0.8065 | 0.6867 | |
| FSDAF | 0.8740 | 0.8350 | 0.8623 | 0.4248 | 0.8560 | 0.8303 | |
| STARFM | 0.8432 | 0.7789 | 0.8150 | 0.5262 | 0.8552 | 0.8602 | |
| SSIM | ELSTFM | 0.9370 | 0.8868 | 0.8910 | 0.5931 | 0.9050 | 0.9043 |
| Fit_FC | 0.9300 | 0.8683 | 0.8732 | 0.4019 | 0.8057 | 0.6983 | |
| FSDAF | 0.9185 | 0.8301 | 0.8131 | 0.4664 | 0.8611 | 0.8390 | |
| STARFM | 0.9055 | 0.8225 | 0.8006 | 0.5598 | 0.8610 | 0.8700 | |
| RMSE | ELSTFM | 0.0113 | 0.0183 | 0.0257 | 0.0655 | 0.0379 | 0.0357 |
| Fit_FC | 0.0117 | 0.0182 | 0.0260 | 0.0750 | 0.0499 | 0.0568 | |
| FSDAF | 0.0136 | 0.0254 | 0.0405 | 0.0774 | 0.0479 | 0.0433 | |
| STARFM | 0.0147 | 0.0248 | 0.0399 | 0.0719 | 0.0478 | 0.0417 | |
| AAD | ELSTFM | 0.0078 | 0.0126 | 0.0176 | 0.0487 | 0.0261 | 0.0244 |
| Fit_FC | 0.0087 | 0.0135 | 0.0193 | 0.0569 | 0.0371 | 0.0437 | |
| FSDAF | 0.0098 | 0.0187 | 0.0302 | 0.0591 | 0.0343 | 0.0327 | |
| STARFM | 0.0105 | 0.0178 | 0.0288 | 0.0535 | 0.0341 | 0.0303 | |
| Band 1 | Band 2 | Band 3 | Band 4 | Band 5 | Band 7 | ||
|---|---|---|---|---|---|---|---|
| γ | ELSTFM | 0.7466 | 0.8689 | 0.7992 | 0.8192 | 0.9096 | 0.8417 |
| Fit_FC | 0.4764 | 0.8156 | 0.7316 | 0.7930 | 0.8983 | 0.8085 | |
| FSDAF | 0.7026 | 0.8368 | 0.7537 | 0.8095 | 0.8901 | 0.8012 | |
| STARFM | 0.7034 | 0.8533 | 0.7692 | 0.8181 | 0.8998 | 0.8081 | |
| SSIM | ELSTFM | 0.9786 | 0.9825 | 0.9525 | 0.8539 | 0.9263 | 0.8970 |
| Fit_FC | 0.9600 | 0.9793 | 0.9442 | 0.8279 | 0.9208 | 0.8817 | |
| FSDAF | 0.9754 | 0.9800 | 0.9433 | 0.8367 | 0.9156 | 0.8730 | |
| STARFM | 0.9742 | 0.9809 | 0.9416 | 0.8518 | 0.9183 | 0.8689 | |
| RMSE | ELSTFM | 0.0056 | 0.0053 | 0.0088 | 0.0241 | 0.0206 | 0.0185 |
| Fit_FC | 0.0071 | 0.0052 | 0.0084 | 0.0250 | 0.0207 | 0.0177 | |
| FSDAF | 0.0059 | 0.0053 | 0.0095 | 0.0244 | 0.0214 | 0.0204 | |
| STARFM | 0.0060 | 0.0053 | 0.0099 | 0.0241 | 0.0218 | 0.0219 | |
| AAD | ELSTFM | 0.0043 | 0.0040 | 0.0063 | 0.0170 | 0.0143 | 0.0130 |
| Fit_FC | 0.0055 | 0.0038 | 0.0059 | 0.0183 | 0.0153 | 0.0128 | |
| FSDAF | 0.0045 | 0.0041 | 0.0070 | 0.0179 | 0.0163 | 0.0148 | |
| STARFM | 0.0045 | 0.0040 | 0.0071 | 0.0173 | 0.0156 | 0.0152 | |
| Band 1 | Band 2 | Band 3 | Band 4 | Band 5 | Band 7 | |||
|---|---|---|---|---|---|---|---|---|
| Site1 | TPS | ref | 0.3872 | 0.2238 | 0.2580 | 0.3667 | 0.3336 | 0.4027 |
| pre | 0.4068 | 0.3910 | 0.2899 | 0.4422 | 0.3252 | 0.1883 | ||
| NNI | ref | 0.3488 | 0.1988 | 0.2321 | 0.3403 | 0.3016 | 0.3769 | |
| pre | 0.3624 | 0.3471 | 0.2594 | 0.4031 | 0.2888 | 0.1726 | ||
| Site2 | TPS | ref | 0.5151 | 0.4936 | 0.5080 | 0.4918 | 0.6315 | 0.5991 |
| pre | 0.5322 | 0.4553 | 0.5522 | 0.6385 | 0.6527 | 0.6410 | ||
| NNI | ref | 0.4776 | 0.4537 | 0.4698 | 0.4409 | 0.6021 | 0.5714 | |
| pre | 0.4931 | 0.4188 | 0.5163 | 0.5962 | 0.6233 | 0.6147 | ||
| Band 1 | Band 2 | Band 3 | Band 4 | Band 5 | Band 7 | |||
|---|---|---|---|---|---|---|---|---|
| Site1 | TPS | γ | 0.8780 | 0.8431 | 0.8694 | 0.4692 | 0.8783 | 0.8538 |
| SSIM | 0.9387 | 0.8845 | 0.8862 | 0.5038 | 0.8861 | 0.8631 | ||
| RMSE | 0.0111 | 0.0190 | 0.0265 | 0.0738 | 0.0417 | 0.0406 | ||
| AAD | 0.0077 | 0.0131 | 0.0179 | 0.0556 | 0.0286 | 0.0289 | ||
| NNI | γ | 0.8749 | 0.8384 | 0.8654 | 0.4635 | 0.8758 | 0.8539 | |
| SSIM | 0.9371 | 0.8810 | 0.8825 | 0.4992 | 0.8837 | 0.8634 | ||
| RMSE | 0.0112 | 0.0193 | 0.0271 | 0.0743 | 0.0422 | 0.0406 | ||
| AAD | 0.0078 | 0.0132 | 0.0181 | 0.0559 | 0.0289 | 0.0288 | ||
| Site2 | TPS | γ | 0.7280 | 0.8665 | 0.7836 | 0.8052 | 0.9060 | 0.8295 |
| SSIM | 0.9774 | 0.9822 | 0.9492 | 0.8441 | 0.9230 | 0.8887 | ||
| RMSE | 0.0057 | 0.0054 | 0.0090 | 0.0250 | 0.0209 | 0.0192 | ||
| AAD | 0.0043 | 0.0041 | 0.0065 | 0.0176 | 0.0146 | 0.0135 | ||
| NNI | γ | 0.7240 | 0.8654 | 0.7807 | 0.7985 | 0.9045 | 0.8267 | |
| SSIM | 0.9769 | 0.9820 | 0.9484 | 0.8398 | 0.9217 | 0.8866 | ||
| RMSE | 0.0057 | 0.0054 | 0.0091 | 0.0253 | 0.0212 | 0.0194 | ||
| AAD | 0.0044 | 0.0041 | 0.0065 | 0.0177 | 0.0148 | 0.0136 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ping, B.; Meng, Y.; Su, F. An Enhanced Linear Spatio-Temporal Fusion Method for Blending Landsat and MODIS Data to Synthesize Landsat-Like Imagery. Remote Sens. 2018, 10, 881. https://doi.org/10.3390/rs10060881
Ping B, Meng Y, Su F. An Enhanced Linear Spatio-Temporal Fusion Method for Blending Landsat and MODIS Data to Synthesize Landsat-Like Imagery. Remote Sensing. 2018; 10(6):881. https://doi.org/10.3390/rs10060881
Chicago/Turabian StylePing, Bo, Yunshan Meng, and Fenzhen Su. 2018. "An Enhanced Linear Spatio-Temporal Fusion Method for Blending Landsat and MODIS Data to Synthesize Landsat-Like Imagery" Remote Sensing 10, no. 6: 881. https://doi.org/10.3390/rs10060881
APA StylePing, B., Meng, Y., & Su, F. (2018). An Enhanced Linear Spatio-Temporal Fusion Method for Blending Landsat and MODIS Data to Synthesize Landsat-Like Imagery. Remote Sensing, 10(6), 881. https://doi.org/10.3390/rs10060881