Automatic Measurement of Water Height in the As Conchas (Spain) Reservoir Using Sentinel 2 and Aerial LiDAR Data

 ,
,  ,
,  ,
, 

Abstract
:
1. Introduction
2. Materials and Methods
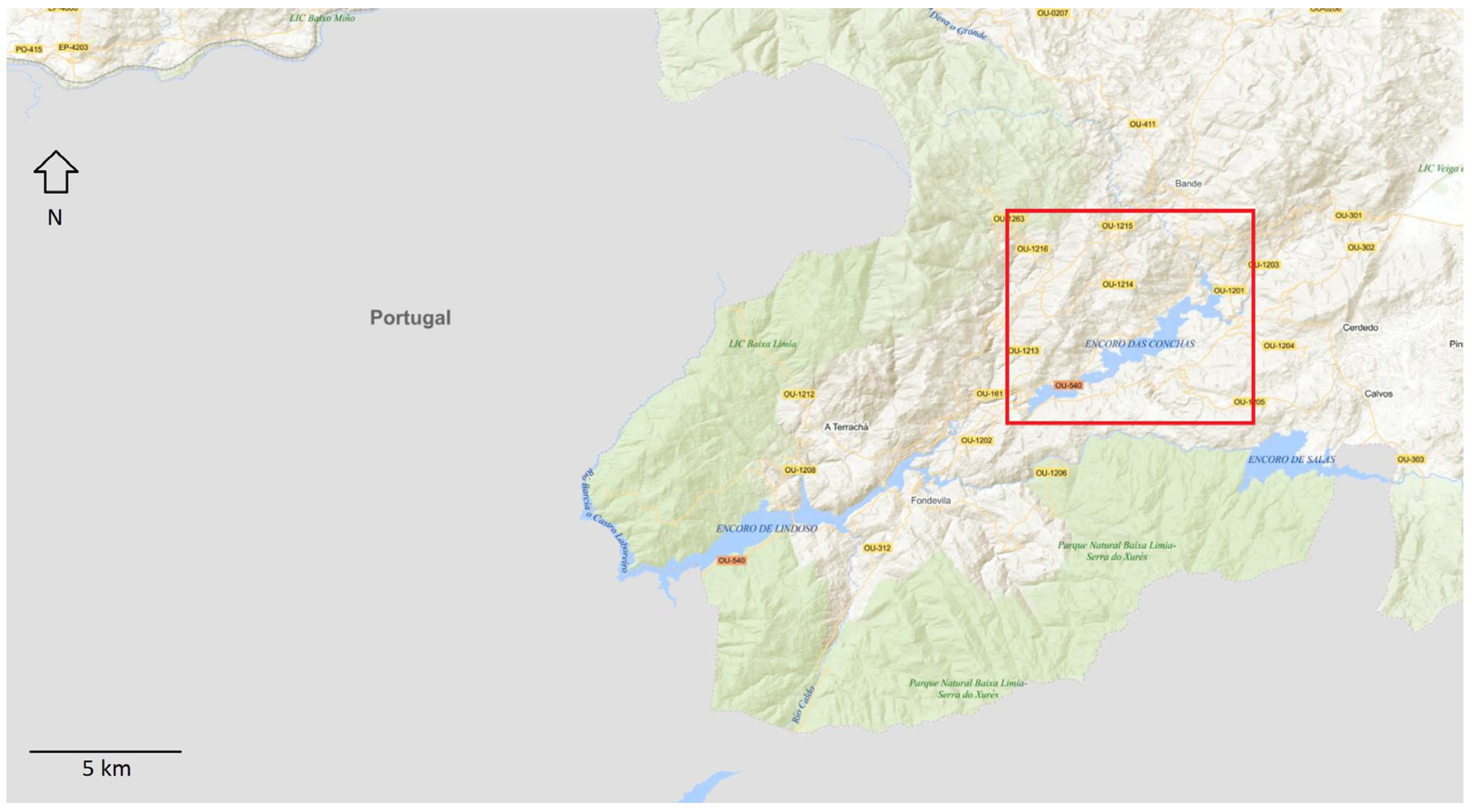
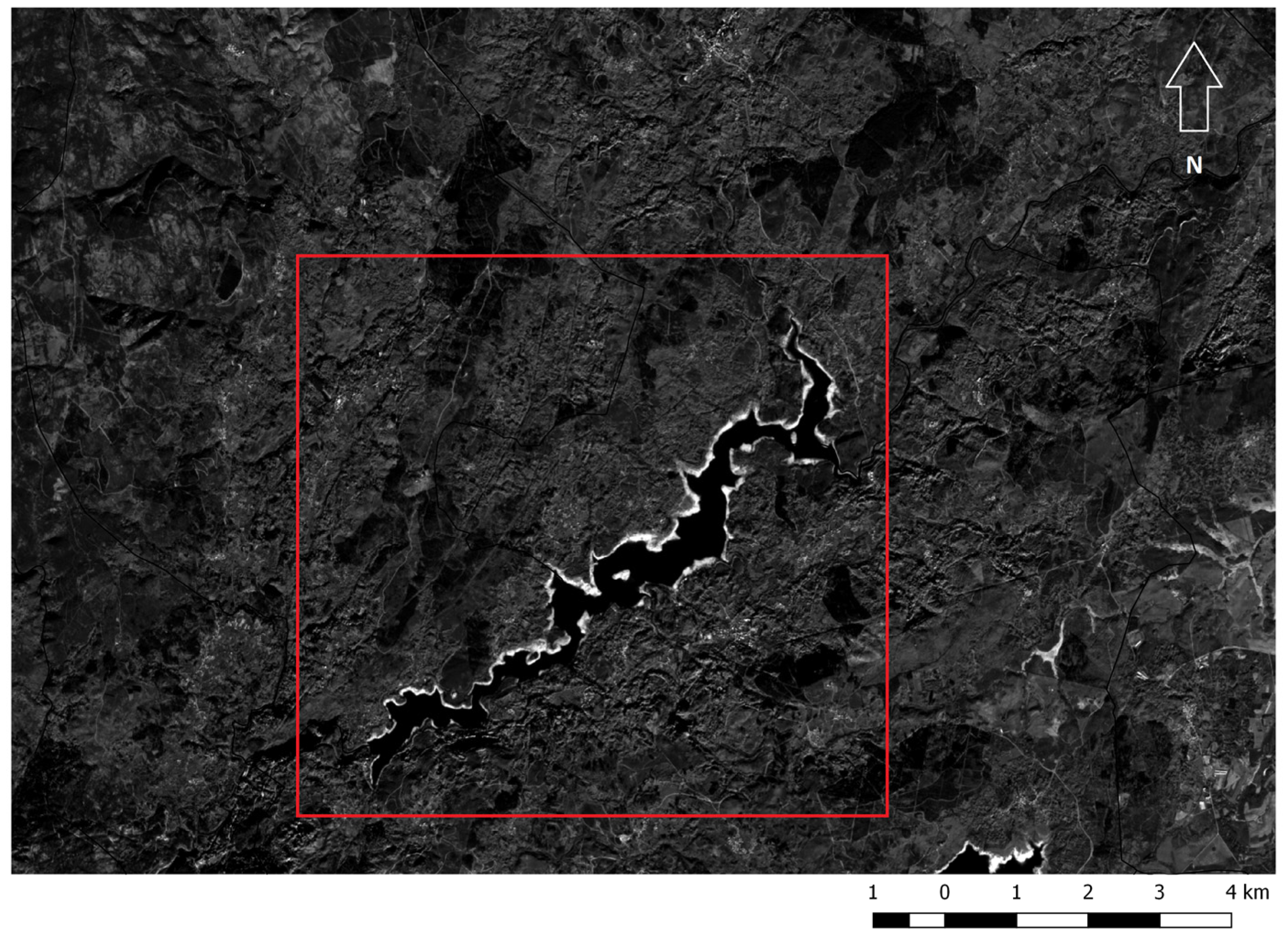
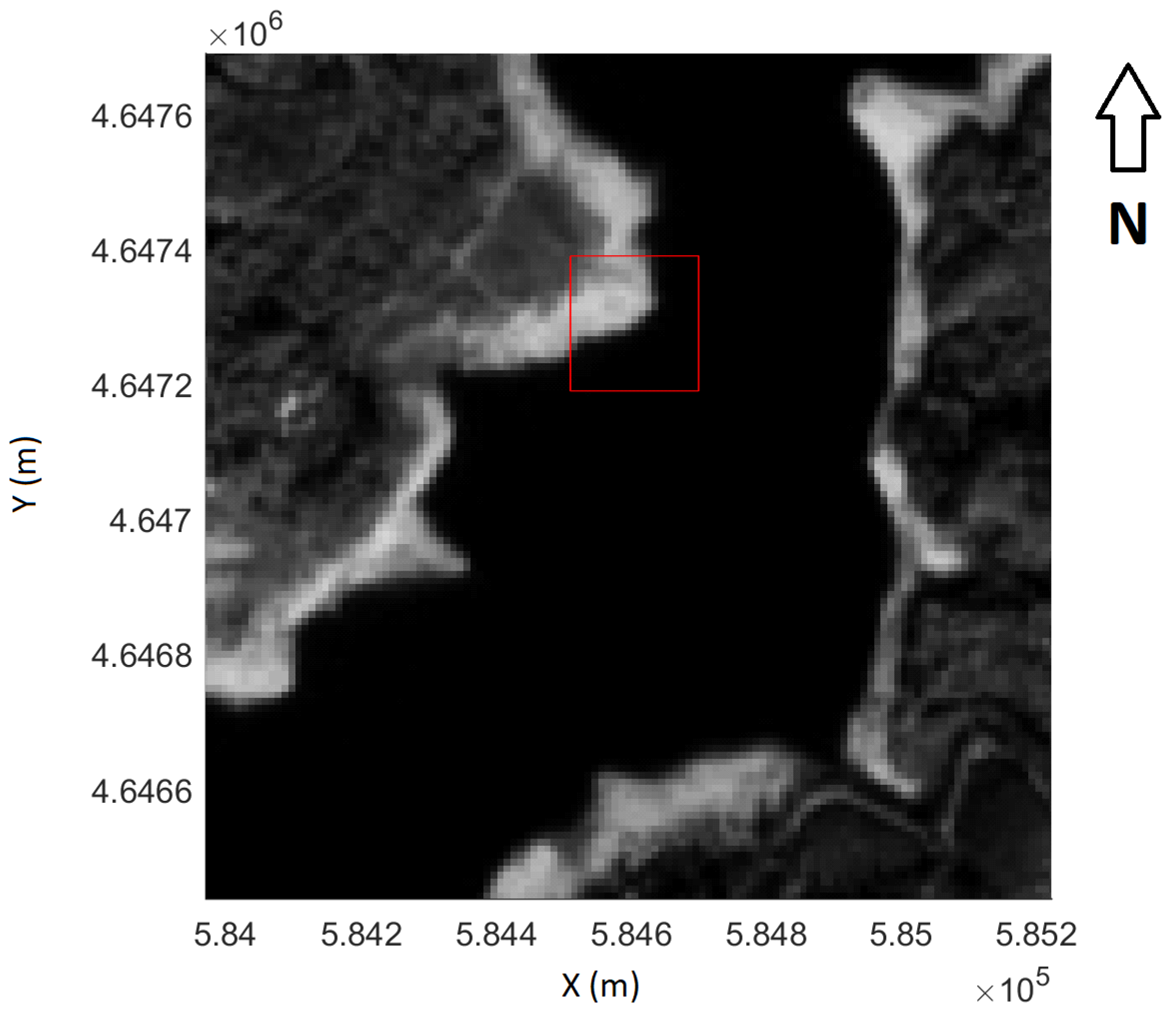
2.1. Area of Study
2.2. Aerial LiDAR Data
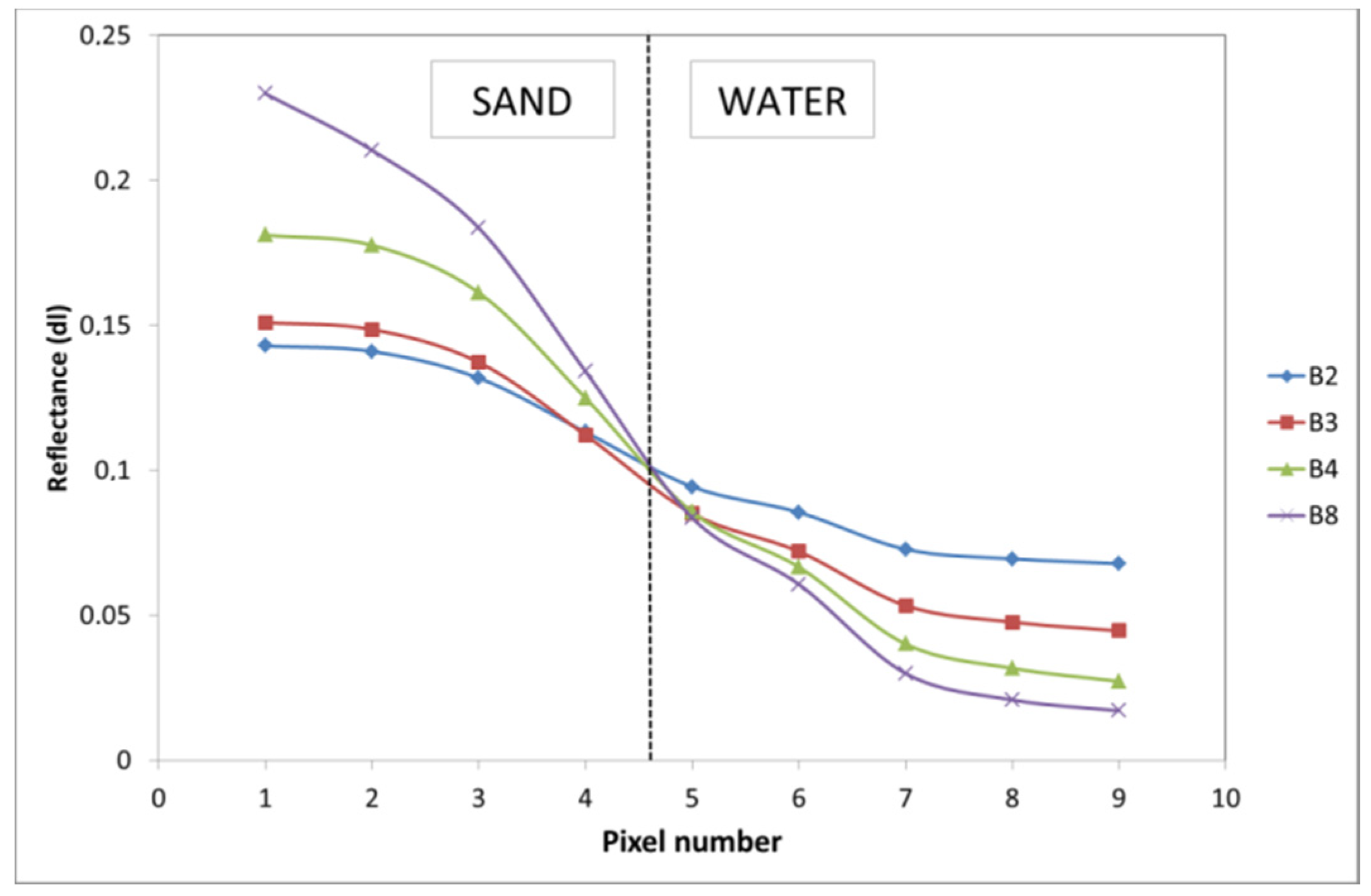
2.3. Satellite Imagery
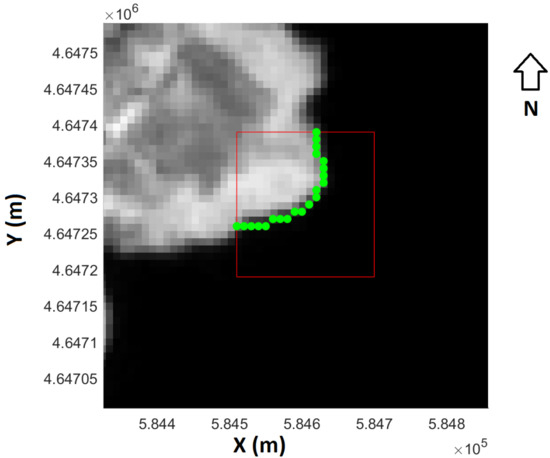
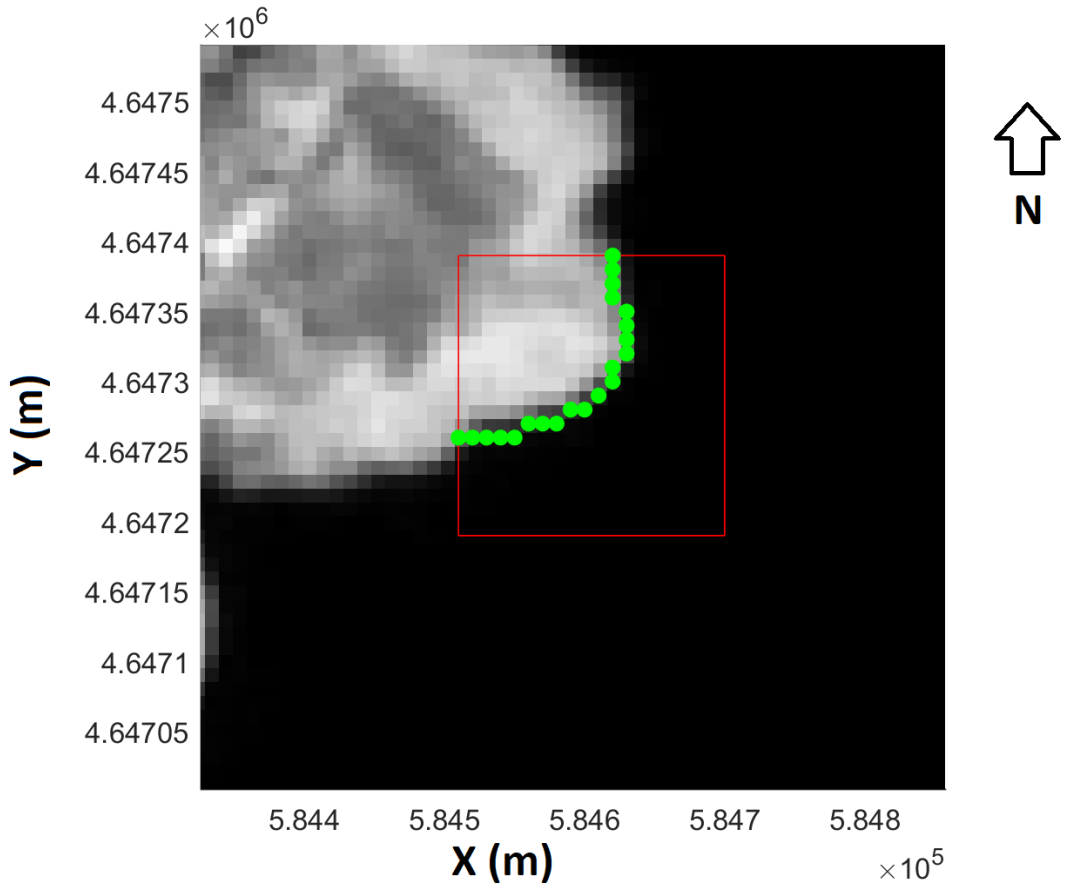
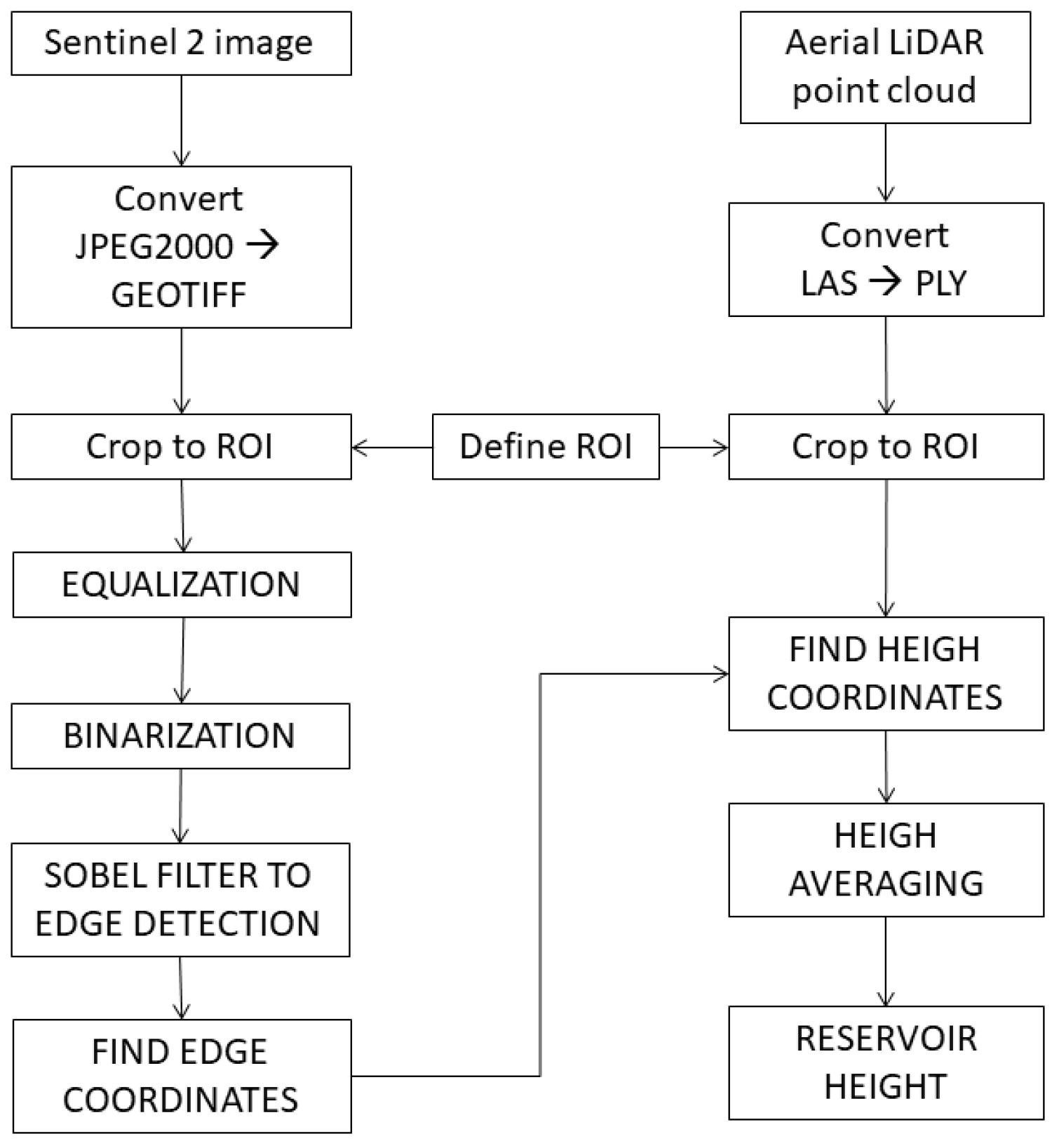
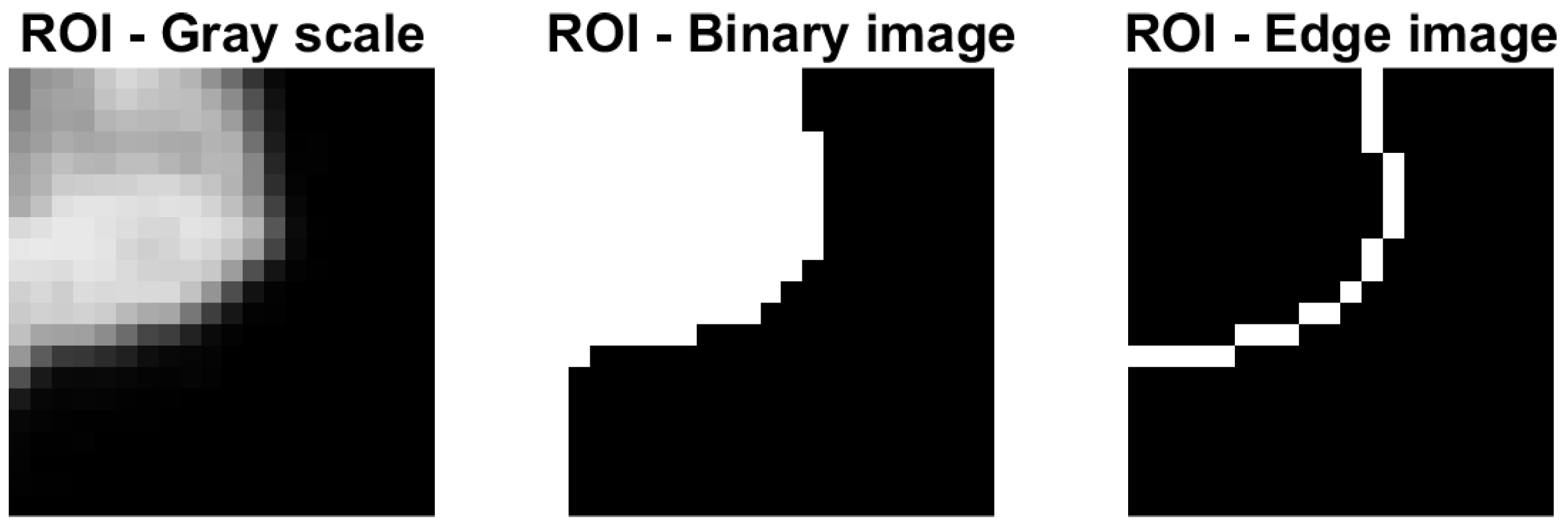
2.4. Data Processing
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hydrographic Miño-Sil Confederation. Available online: https://www.chminosil.es/es/ (accessed on 28 May 2018).
- Tauro, F.; Selker, J.; van de Giesen, N.; Abrate, T.; Uijlenhoet, R.; Porfiri, M.; Manfreda, S.; Caylor, K.; Moramarco, T.; Benveniste, J.; et al. Measurements and Observations in the XXI century (MOXXI): Innovation and multidisciplinarity to sense the hydrological cycle. Hydrol. Sci. J. 2018, 63, 169–196. [Google Scholar] [CrossRef]
- George, D.D. The airborne remote sensing of phytoplankton chlorophyll in the lakes and tarns of the English Lake District. Int. J. Remote Sens. 1997, 18, 1961–1975. [Google Scholar] [CrossRef]
- Dekker, A.G.; Vos, R.J.; Peters, S.W.M. Comparison of remote sensing data, model results and in situ data for total suspended matter (TSM) in the southern Frisian lakes. Sci. Total Environ. 2001, 268, 197–214. [Google Scholar] [CrossRef]
- Sawaya, K.E.; Olmanson, L.G.; Heinert, N.J.; Brezonik, P.L.; Bauer, M.E. Extending satellite remote sensing to local scales: Land and water resource monitoring using high-resolution imagery. Remote Sens. Environ. 2003, 88, 144–156. [Google Scholar] [CrossRef]
- Bandini, F.; JAkobsen, J.; Olesen, D.; Reyna-Gutierrez, J.A.; Bauer-Gottwein, P. Measuring water level in rivers and lakes from lightweight Unmanned Aerial Vehicles. J. Hydrol. 2017, 548, 237–250. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- European Space Agency. Available online: http://www.esa.int/ESA (accessed on 28 May 2018).
- NASA. Available online: https://www.nasa.gov/ (accessed on 28 May 2018).
- Zibordi, G.; Mélin, F.; Berthon, J.F. A time-series of above-water radiometric measurements for coastal water monitoring and remote sensing product validation. IEEE Geosci. Remote Sens. Lett. 2006, 3, 120–124. [Google Scholar] [CrossRef]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote Sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Chen, X.; Cai, X.; Tian, L.; Gan, W. Assessment of inundation changes of Poyang Lake using MODIS observations between 2000 and 2010. Remote Sens. Environ. 2012, 121, 80–92. [Google Scholar] [CrossRef]
- Maximenko, N.; Hafner, J.; Niiler, P. Pathway of marine debris derived from trajectories of Lagrangian drifters. Mar. Pollut. Bull. 2012, 65, 51–62. [Google Scholar] [CrossRef] [PubMed]
- Tarpanelli, A.; Brocca, L.; Barbetta, S.; Faruolo, M.; Lacaba, T.; Moramarco, T. Coupling MODIS and Radar altimetry data for discharge estimation in poorly gauge driver basins. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 141–148. [Google Scholar] [CrossRef]
- Birkett, C.M. Contribution of the TOPEX NASA radar altimeter to the global monitoring of large rivers and wetlands. Water Resour. Res. 1998, 34, 1223–1239. [Google Scholar] [CrossRef]
- Frappart, F.; Calmant, S.; Cauhopé, M.; Seyler, F.; Cazenave, A. Preliminary results of ENVISAT RA-2-derived water levels validation over the Amazon basin. Remote Sens. Environ. 2006, 100, 252–264. [Google Scholar] [CrossRef] [Green Version]
- Crétaux, J.F.; Jelinski, W.; Calmant, S.; Kouraev, A.; Vuglinski, V.; Bergé-Nguyen, M.; Gennero, M.C.; Nino, F.; Abarca del Rio, E.; Cazenave, A.; Maisongrande, P. SOLS: A lake database to monitor in the Near Real Time water level and storage variations from remote sensing data. Adv. Space Res. 2011, 47, 1497–1507. [Google Scholar] [CrossRef]
- Hall, A.C.; Schumann, G.J.P.; Bamber, J.L.; Bates, P.D.; Trigg, M.A. Geodetic corrections to Amazon river water level gauges using ICESat altimetry. Water Resour. Res. 2012, 48, W06602. [Google Scholar] [CrossRef]
- Zhang, G.; Yao, T.; Xie, H.; Zhang, K.; Zhu, F. Lakes state and abundance across the Tibetan Plateau. Chin. Sci. Bull. 2014, 59, 3010–3021. [Google Scholar] [CrossRef]
- Zhang, G.; Yao, T.; Shum, C.K.; Yi, S.; Yang, K.; Xie, H.; Feng, W.; Bolch, T.; Wang, L.; Behrangi, A.; et al. Lake volume and groundwater storage variations in Tibetan Plaeau’s endorheic basin. Geophys. Res. Lett. 2017, 44, 5550–5560. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Abarca del Río, R.; Mergé-Nguyen, M.; Arsen, A.; Drolon, V.; Clos, G.; Maisongrande, P. Lake volumen monitoring from space. Surv. Geophys. 2016, 37, 269–305. [Google Scholar] [CrossRef]
- Sentinel 3. Available online: http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Instruments (accessed on 28 May 2018).
- Spanish Geographic Institute. Available online: http://centrodedescargas.cnig.es/CentroDescargas/locale?request_locale=en (accessed on 28 May 2018).
- Sentinel 2 Satellite. Available online: http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-2 (accessed on 28 May 2018).
- Copernicus Programme. Available online: http://www.copernicus.eu/ (accessed on 28 May 2018).
- Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/ (accessed on 28 May 2018).
- Snap Software. Available online: http://step.esa.int/main/toolboxes/snap/ (accessed on 28 May 2018).
- QGIS Software. Available online: https://www.qgis.org/en/site/ (accessed on May 28 2018).
- Cloud Compare Software. Available online: http://cloudcompare.org/ (accessed on 28 May 2018).
- Matlab Software. Available online: https://www.mathworks.com/products/matlab.html (accessed on 28 May 2018).
- Otsu, N. Threshold selection method from gray-level histrograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Duda, R.; Hart, P. Pattern Classification and Scene Analysis; John Wiley Sons: Hoboken, NJ, USA, 1973; pp. 271–272. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
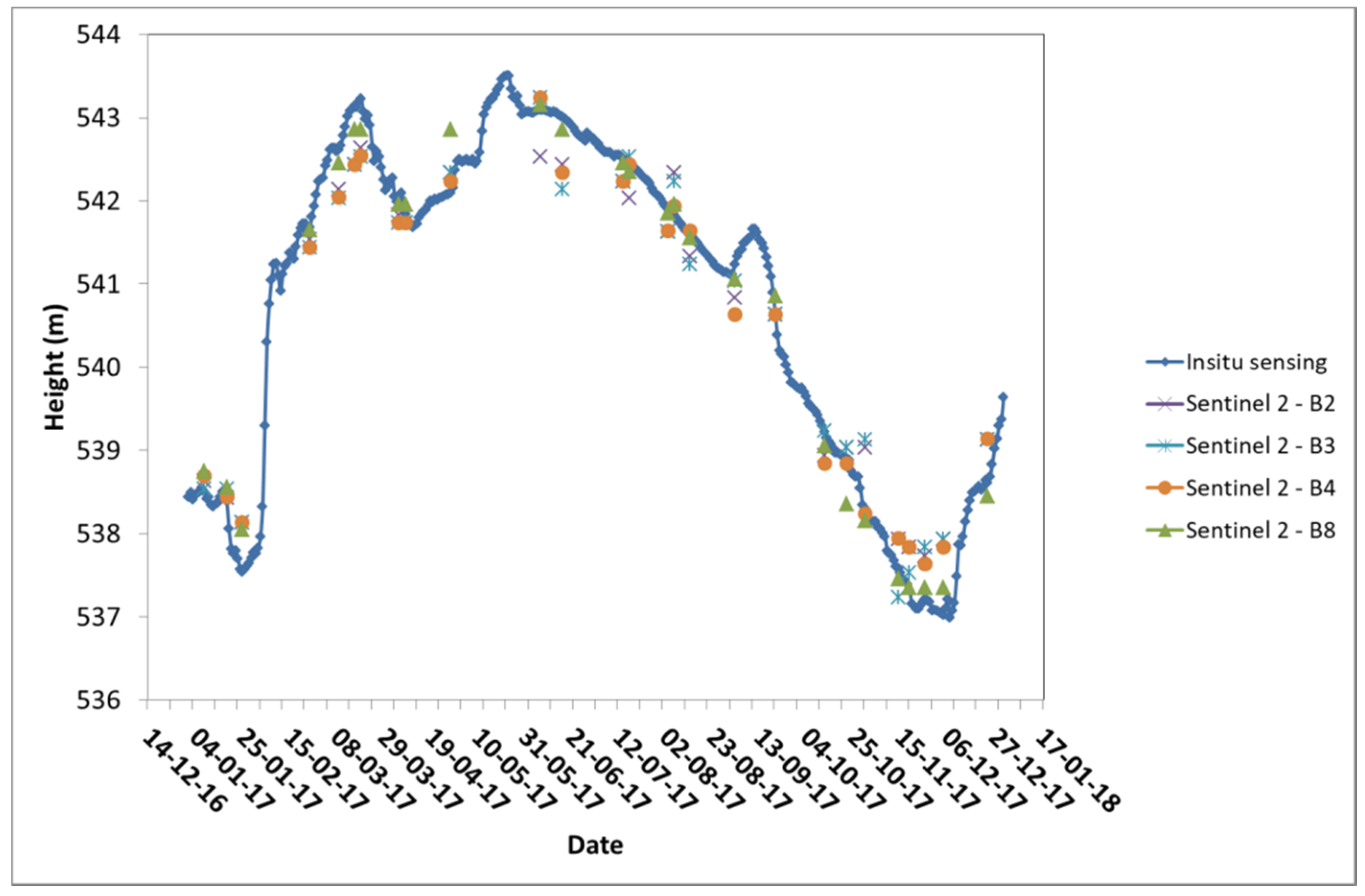
| B2 | B3 | B4 | B8 | |
|---|---|---|---|---|
| Average error (m) | 0.39 | 0.36 | 0.33 | 0.20 |
| Standard deviation (m) | 0.23 | 0.28 | 0.25 | 0.17 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Jorge, H.; González-deSantos, L.M.; Martínez-Sánchez, J.; Sánchez-Rodríguez, A.; Lorenzo, H. Automatic Measurement of Water Height in the As Conchas (Spain) Reservoir Using Sentinel 2 and Aerial LiDAR Data. Remote Sens. 2018, 10, 902. https://doi.org/10.3390/rs10060902
González-Jorge H, González-deSantos LM, Martínez-Sánchez J, Sánchez-Rodríguez A, Lorenzo H. Automatic Measurement of Water Height in the As Conchas (Spain) Reservoir Using Sentinel 2 and Aerial LiDAR Data. Remote Sensing. 2018; 10(6):902. https://doi.org/10.3390/rs10060902
Chicago/Turabian StyleGonzález-Jorge, Higinio, Luis Miguel González-deSantos, Joaquin Martínez-Sánchez, Ana Sánchez-Rodríguez, and Henrique Lorenzo. 2018. "Automatic Measurement of Water Height in the As Conchas (Spain) Reservoir Using Sentinel 2 and Aerial LiDAR Data" Remote Sensing 10, no. 6: 902. https://doi.org/10.3390/rs10060902
APA StyleGonzález-Jorge, H., González-deSantos, L. M., Martínez-Sánchez, J., Sánchez-Rodríguez, A., & Lorenzo, H. (2018). Automatic Measurement of Water Height in the As Conchas (Spain) Reservoir Using Sentinel 2 and Aerial LiDAR Data. Remote Sensing, 10(6), 902. https://doi.org/10.3390/rs10060902