Estimation of Water Level Changes of Large-Scale Amazon Wetlands Using ALOS2 ScanSAR Differential Interferometry




Abstract
:1. Introduction
2. Data Processing Strategy
2.1. SAR Dataset Used
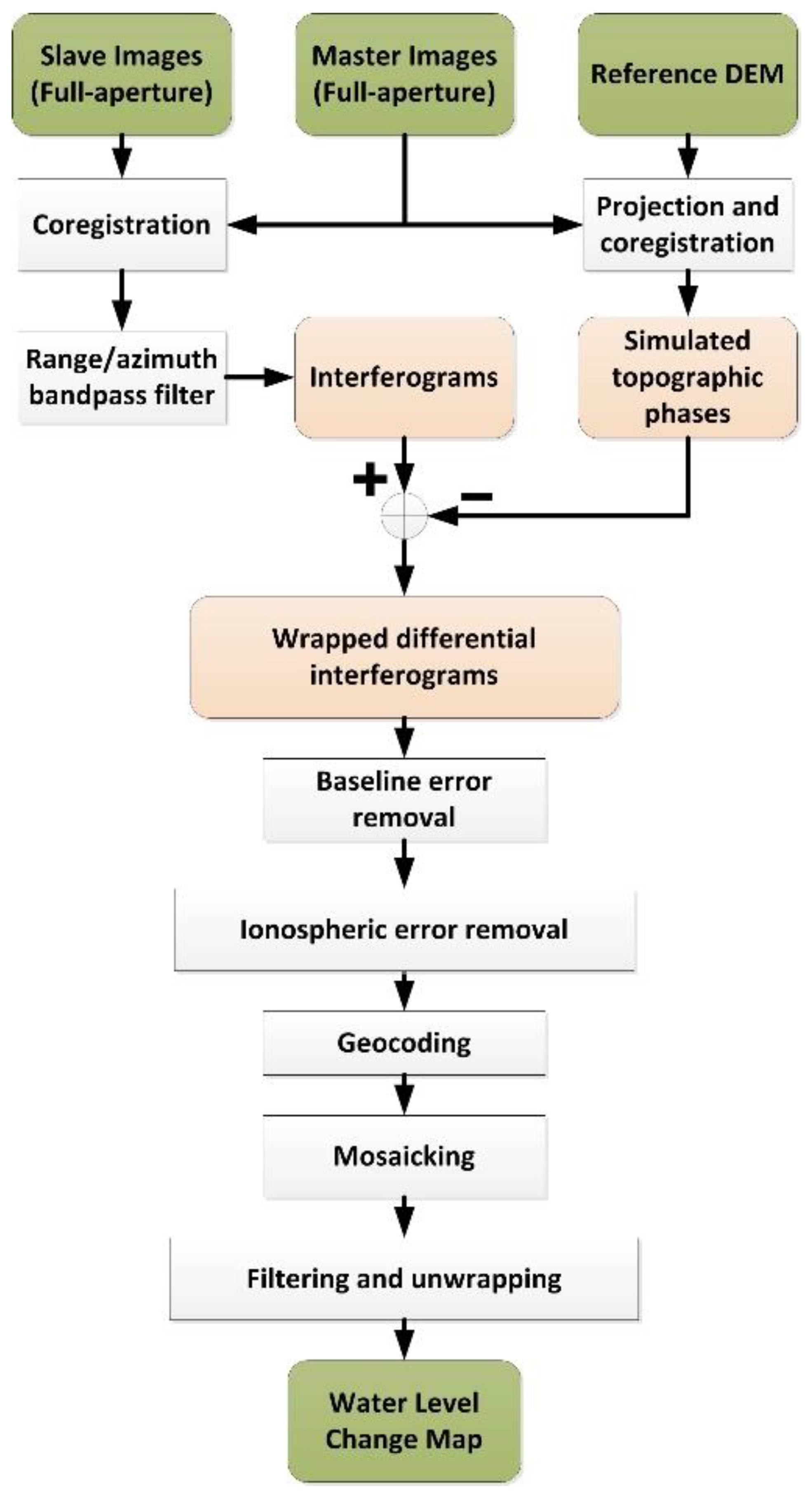
2.2. Basic Procedures of ScanSAR DInSAR Processing
2.3. Coregistration
2.4. Baseline Error Removal
2.5. Ionospheric Error Removal
2.6. Phase Unwrapping
3. Results and Discussion
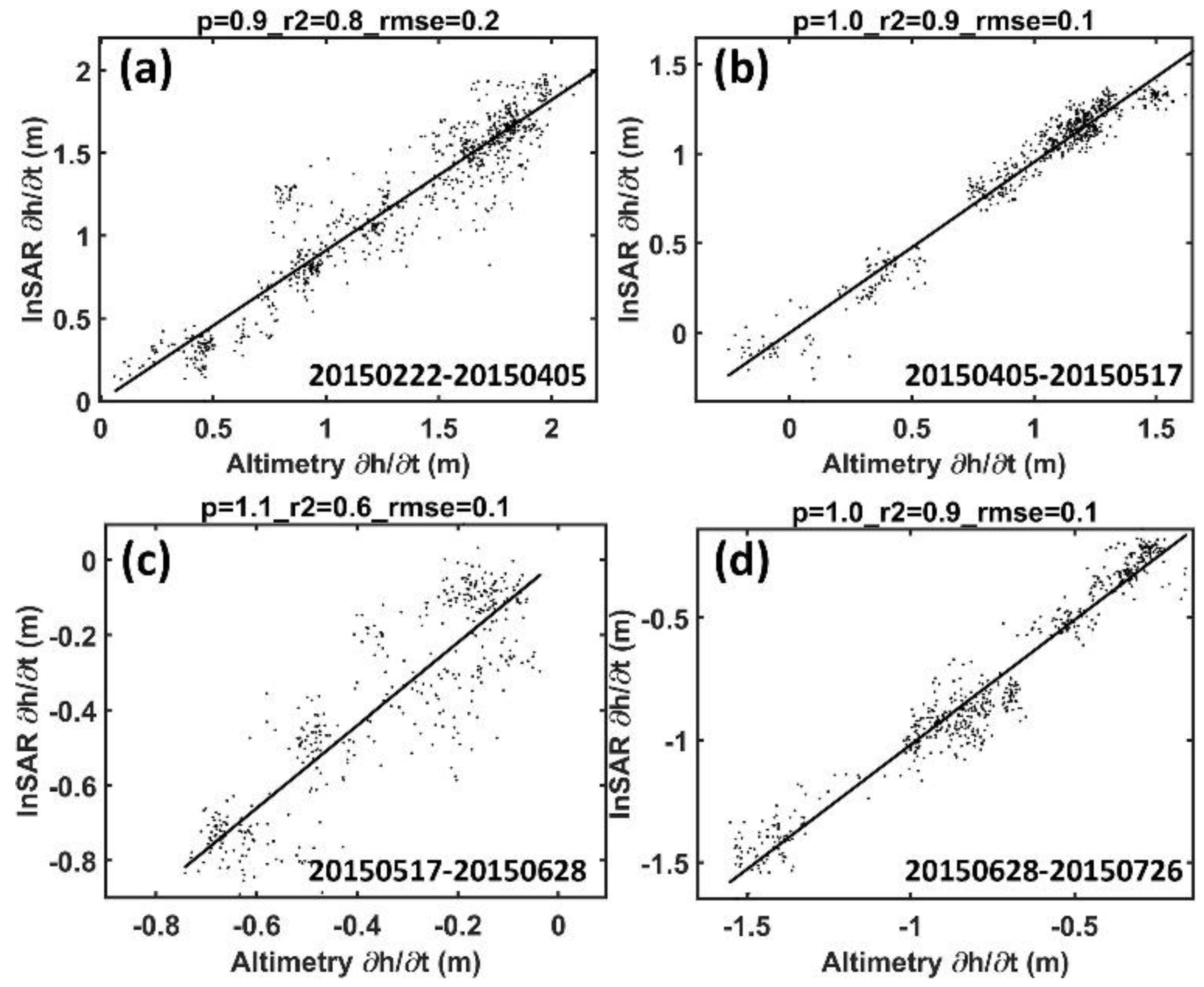
3.1. Results of SARAL Altimetry
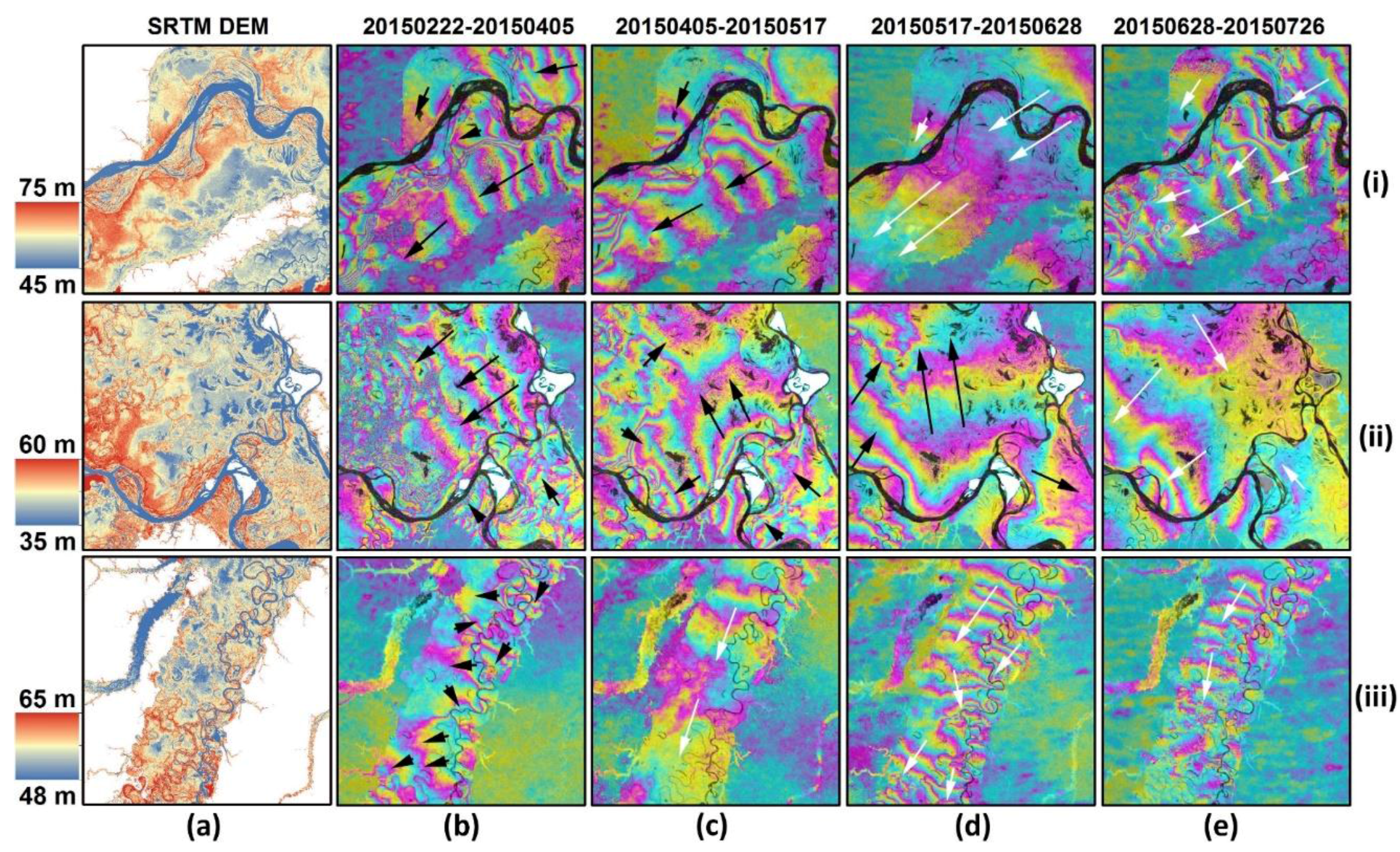
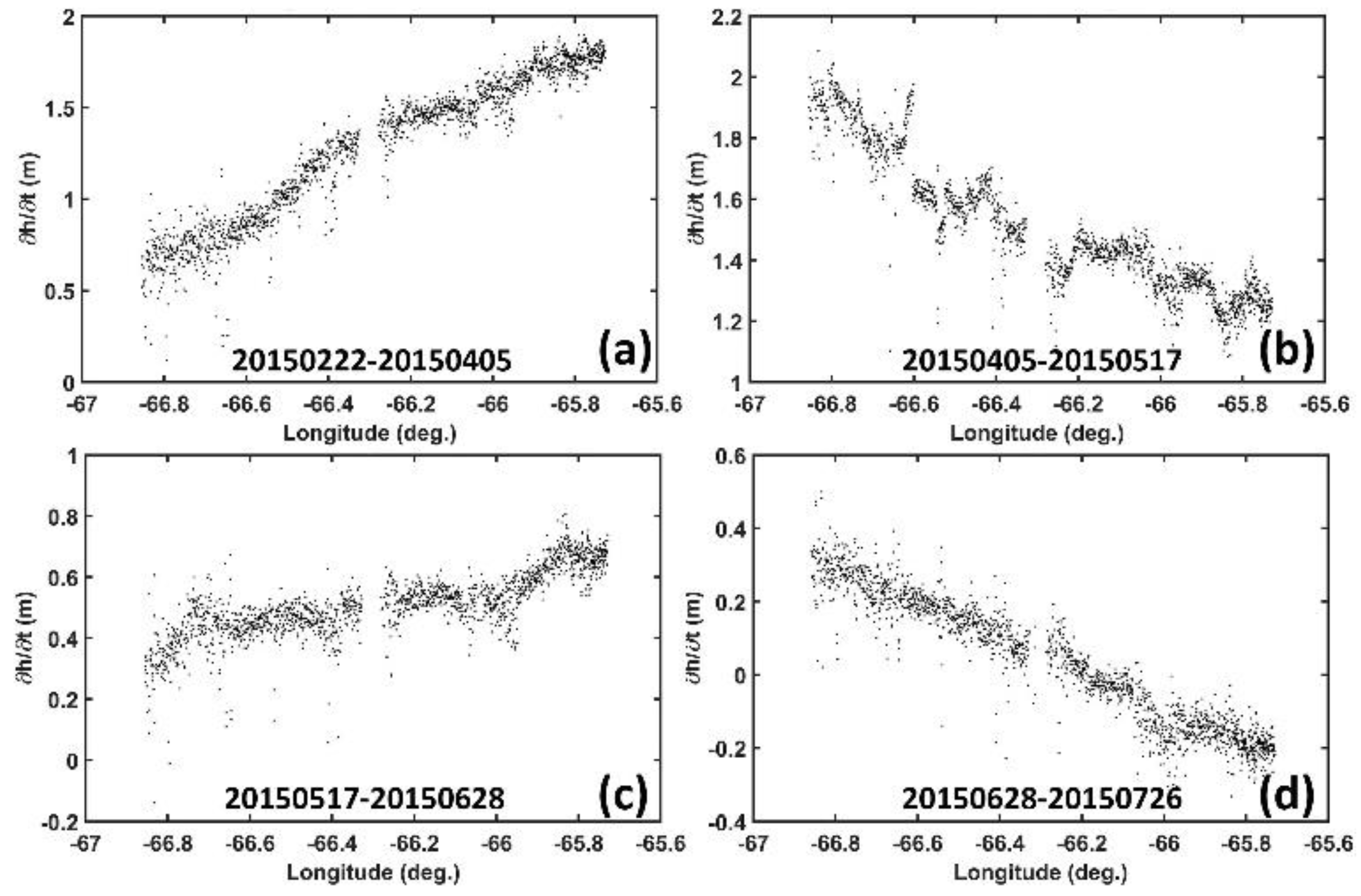
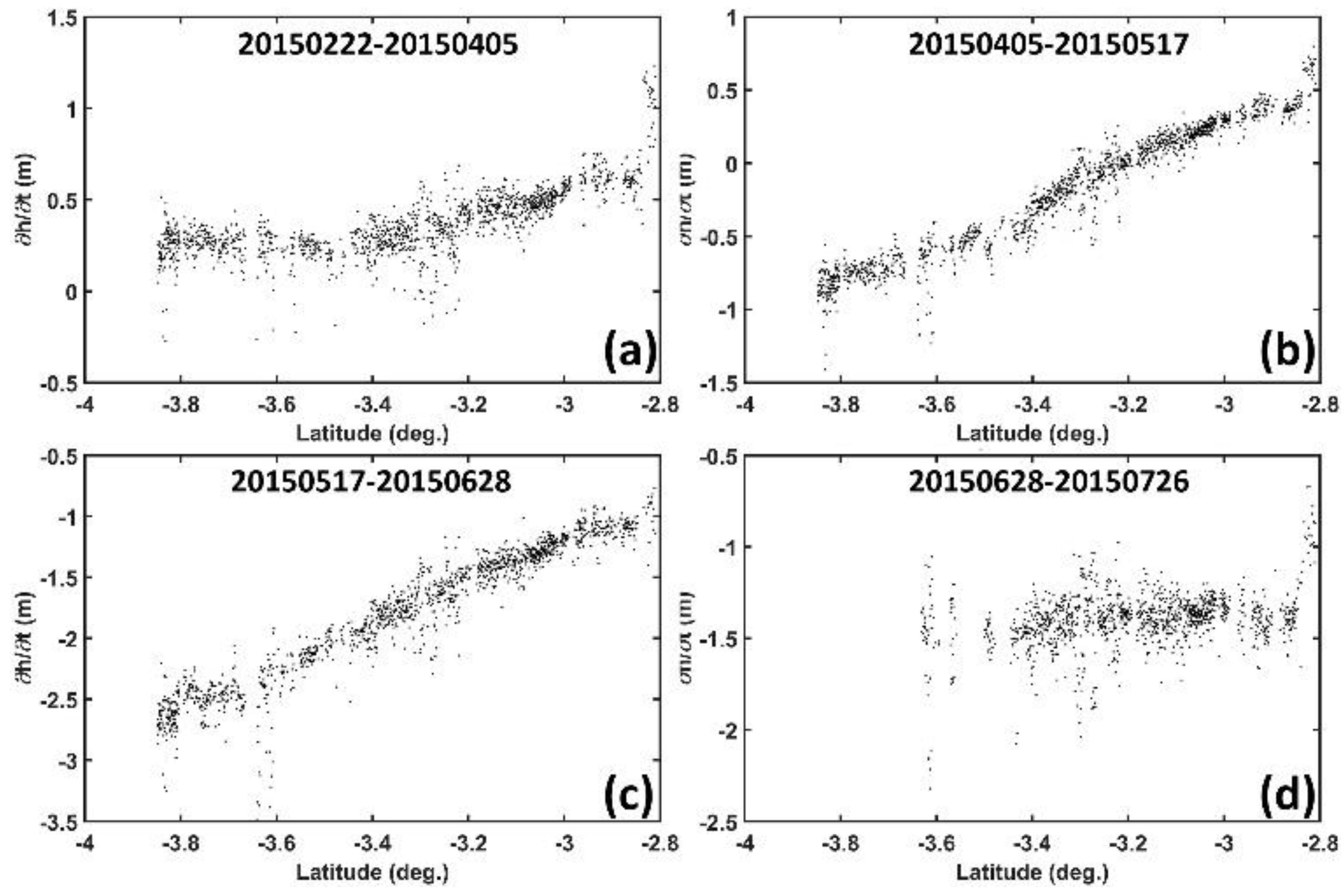
3.2. Interpretations of ∂h/∂t Patterns on a Small Scale
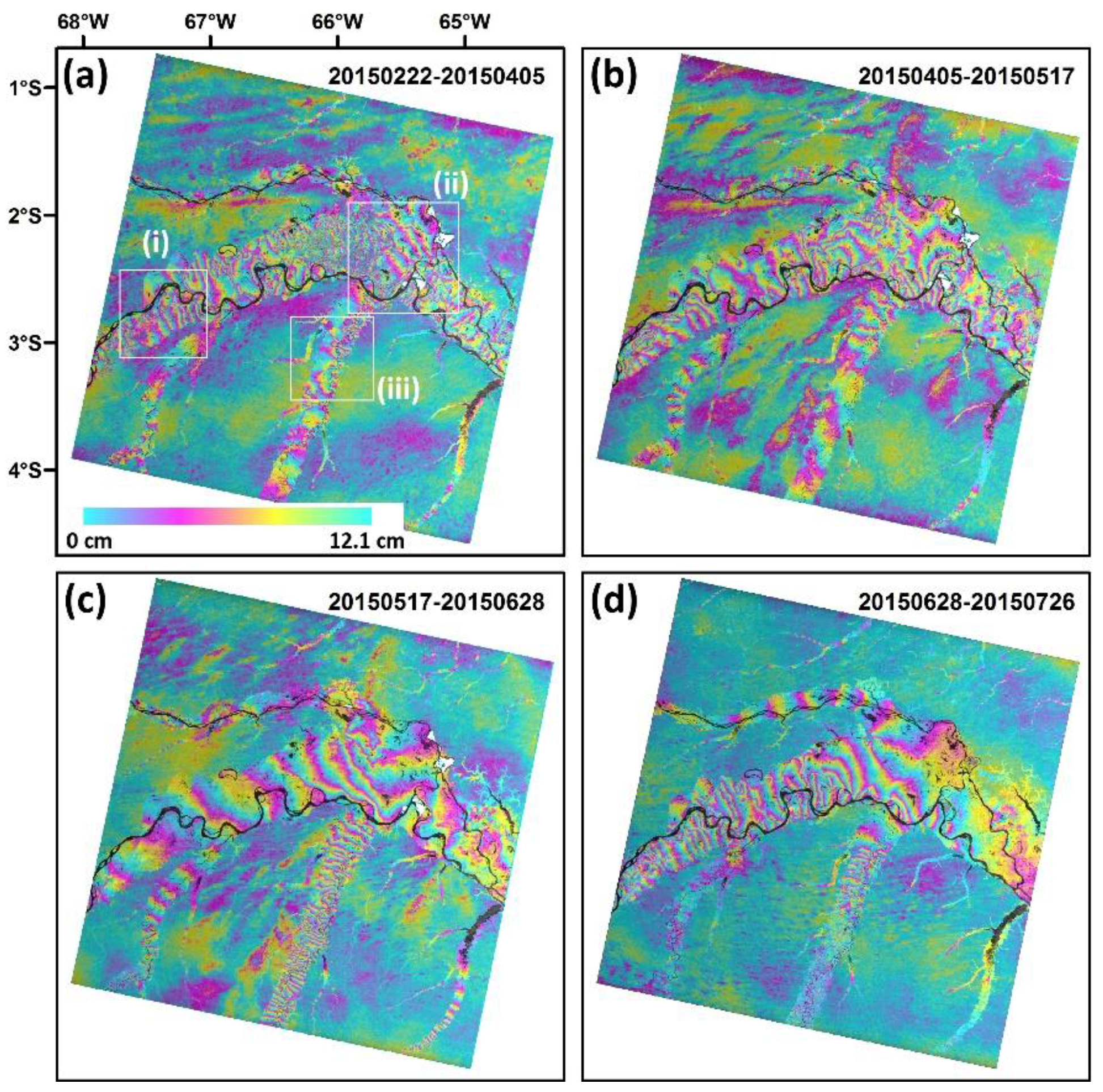
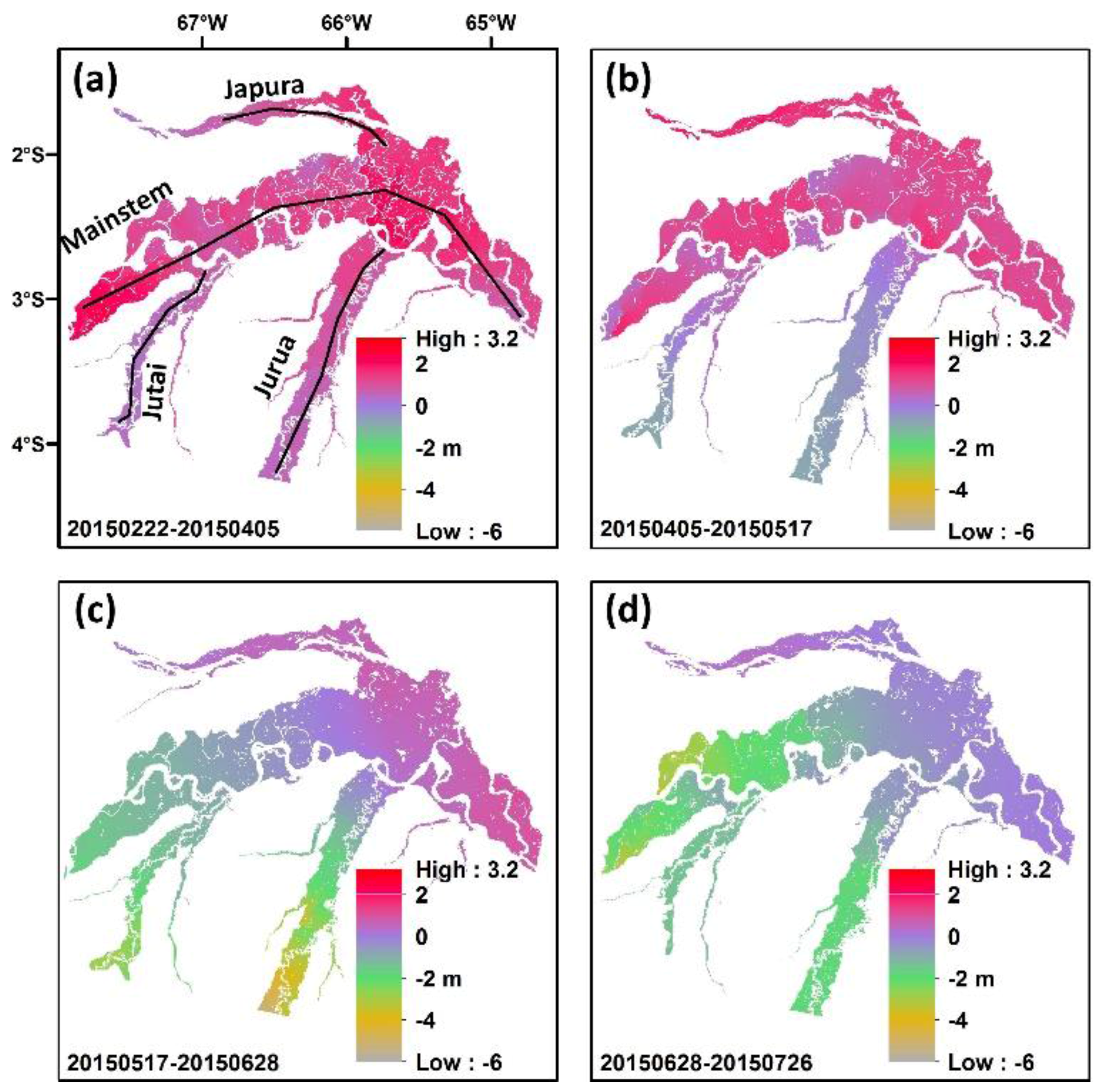
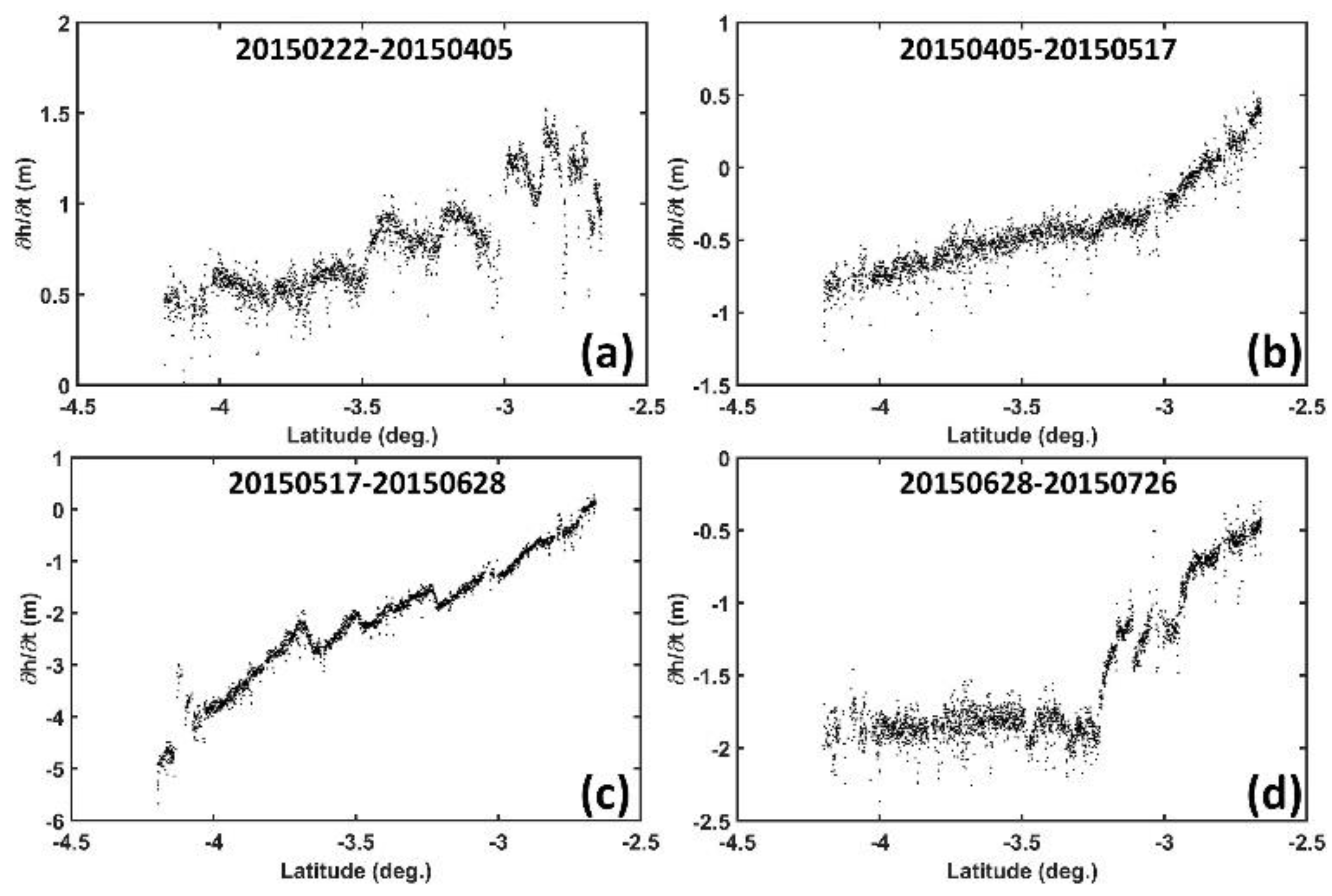
3.3. Interpretations of ∂h/∂t Patterns on a Large Scale
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Molinier, M.; Guyot, J.L.; Oliveira, E.; Guimaraes, V.; Chaves, A. Hydrologie du bassin de l’Amazone. In Grands bassins fluviaux périatlantiques: Congo, Niger; Actes du Colloque PEGI/INSU/CNRS, 22-24/11/1993; Amazone, J.B., Olivry, J.C., Eds.; ORSTOM: Paris, France, 1995; pp. 335–344. [Google Scholar]
- Ronchail, J.; Guyot, J.L.; Villar, J.C.E.; Fraizy, P.; Cochonneau, G.; Oliveira, E.; Filizola, N.; Ordenez, J.J. Impact of the Amazon tributaries on major floods at Óbidos. In Climate Variability and Change: Hydrological Impacts; IAHS Publication Red book; Demuth, S., Gustard, A., Planos, E., Scatena, F., Servat, E., Eds.; IAHS: London, UK, 2006; pp. 220–225. [Google Scholar]
- Paiva, R.C.D.; Buarque, D.C.; Collischonn, W.; Bonnet, M.-P.; Frappart, F.; Calmant, S.; Mendes, C.A.B. Large-scale hydrologic and hydrodynamic modeling of the Amazon River basin. Water Resour. Res. 2013, 49, 1226–1243. [Google Scholar] [CrossRef] [Green Version]
- Paiva, R.C.D.; Collischonn, W.; Tucci, C.E.M. Large scale hydrologic and hydrodynamic modeling using limited data and a GIS based approach. J. Hydrol. 2011, 406, 170–181. [Google Scholar] [CrossRef]
- Yamazaki, D.; Kanae, S.; Kim, H.; Oki, T. A physically based description of floodplain inundation dynamics in a global river routing model. Water Resour. Res. 2011, 47, W04501. [Google Scholar] [CrossRef]
- Dunne, T.; Mertes, L.A.K.; Meade, R.H.; Richey, J.E.; Forsberg, B.R. Exchanges of sediment between the flood plain and channel of the Amazon River in Brail. Geol. Soc. Am. Bull. 1998, 110, 450–467. [Google Scholar] [CrossRef]
- Melack, J.M.; Forsberg, B. Biogeochemistry of Amazon floodplain lakes and associated wetlands. In The Biogeochemistry of the Amazon Basin and its Role in a Changing World; McClain, M.E., Victoria, R.L., Richey, J.E., Eds.; Oxford University Press: Oxford, UK, 2001; pp. 235–276. [Google Scholar]
- Hamilton, S.K.; Sippel, S.J.; Melack, J.M. Comparison of Inundation Patterns among Major South American Floodplains. J. Geophys. Res. 2002, 107, 8038. [Google Scholar] [CrossRef]
- Melack, J.M.; Engle, D. An organic carbon budget for an Amazon floodplain lake. Verh. Internat. Verein. Limnol. 2009, 30, 1179–1182. [Google Scholar] [CrossRef]
- Richey, J.E.; Melack, J.M.; Aufdenkampe, A.K.; Ballester, V.M.; Hess, L. Outgassing from Amazonian rivers and wetlands as a large tropical source of atmospheric carbon dioxide. Nature 2002, 416, 617–620. [Google Scholar] [CrossRef] [PubMed]
- Melack, J.M.; Hess, L.L.; Gastil, M.; Forsberg, B.R.; Hamilton, S.K.; Lima, I.B.T.; Novo, E.M.L.M. Regionalization of methane emissions in the Amazon basin with microwave remote sensing. Glob. Chang. Boil. 2004, 10, 530–544. [Google Scholar] [CrossRef]
- Melack, J.M. Aquatic ecosystems. In Interactions between Biosphere, Atmosphere and Human Land Use in the Amazon Basin. Ecological Studies 227; Nagy, L., Forsberg, B., Artaxo, P., Eds.; Springer: Berlin, Germany, 2016; pp. 117–145. [Google Scholar]
- Alsdorf, D.E.; Lettenmaier, D.P. Tracking fresh water from space. Science 2003, 301, 1485–1488. [Google Scholar] [CrossRef] [PubMed]
- Yamazaki, D.; Sato, T.; Kanae, S.; Hirabayashi, Y.; Bates, D.P. Regional flood dynamics in a bifurcating mega delta simulated in a global river model. Geophys. Res. Lett. 2014, 41, 3127–3135. [Google Scholar] [CrossRef] [Green Version]
- Pontes, P.R.M.; Fan, F.M.; Fleischmann, A.S.; Paiva, R.C.D.; Buarque, D.C.; Siqueira, V.A.; Jardim, P.F.; Sorribas, M.V.; Collischonn, W. MGB-IPH model for hydrological and hydraulic simulation of large floodplain river systems coupled with open source GIS. Environ. Model. Softw. 2017, 94, 1–20. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, M.R. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef] [Green Version]
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inv. Probl. 1998, 14, R1–R54. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Melack, J.M.; Dunne, T.; Mertes, L.A.K.; Hess, L.L.; Smith, L.C. Interferometric radar measurements of water level changes on the Amzon floodplain. Nature 2000, 404, 174–177. [Google Scholar] [CrossRef] [PubMed]
- Alsdorf, D.E.; Birkett, C.; Dunne, T.; Melack, J.M.; Hess, L. Water level changes in a large Amazon lake measured with spaceborne radar interferometry and altimetry. Geophys. Res. Lett. 2001, 28, 2671–2674. [Google Scholar] [CrossRef] [Green Version]
- Alsdorf, D.E.; Smith, L.C.; Melack, J.M. Amazon Floodplain Water Level Changes Measured with Interferometric SIR-C Radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 423–431. [Google Scholar] [CrossRef]
- Jung, H.C.; Hamski, J.; Durand, M.; Alsdorf, D.; Hossain, F.; Lee, H.; Hossain, A.K.M.A.; Hasan, K.; Khan, A.S.; Hoque, A.K.M.Z. Characterization of complex fluvial systems via remote sensing of spatial and temporal water level variations in the Amazon, Congo, and Brahmaputra Rivers. Earth Surf. Process. Landforms 2010, 35, 294–304. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Bates, P.; Melack, J.; Wilson, M.; Dunne, T.B. Spatial and temporal complexity of the Amazon flood measured from space. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef] [Green Version]
- Alsdorf, D.E.; Beighley, E.; Laraque, A.; Lee, H.; Tshimanga, R.; O’Loughlin, F.; Mahé, G.; Dinga, B.; Moukandi, G.; Spencer, R.G.M. Opportunities for hydrologic research in the Congo Basin. Rev. Geophys. 2016, 54, 378–409. [Google Scholar] [CrossRef] [Green Version]
- Yuan, T.; Lee, H.; Jung, H.C. Congo floodplain hydraulics using PALSAR InSAR and Envisat altimetry data. In Remote Sensing of Hydrological Extremes; Springer: Berlin, Germany, 2017; pp. 65–81. [Google Scholar]
- Yuan, T.; Lee, H.; Jung, H.C.; Aierken, A.; Beighley, E.; Alsdorf, D.; Tshimanga, R.; Kim, D. Absolute water storages in the Congo River floodplains from integration of InSAR and satellite radar altimetry. Remote Sens. Environ. 2017, 201, 57–72. [Google Scholar] [CrossRef]
- Jung, H.C.; Alsdorf, D. Repeat-pass multi-temporal interferometric SAR coherence variations with Amazon floodplain and lake habitats. Int. J. Remote Sens. 2010, 31, 881–901. [Google Scholar] [CrossRef]
- Salvia, M.; Grings, F.; Ferrazzoli, P.; Barraza, V.; Douna, V.; Perna, P.; Karszenbaum, H. Estimating flooded area and mean water level using active and passive microwaves: The example of Paran River delta floodplain. Hydrol. Earth Syst. Sci. Discuss. 2011, 8, 2895–2928. [Google Scholar] [CrossRef]
- Grings, F.M.; Ferrazzoli, P.; Jacobo-Berlles, J.C.; Karszenbaum, H.; Tiffenberg, J.; Pratolongo, P.; Kandus, P. Monitoring flood condition in marshes using EM models and Envisat ASAR observations. IEEE Trans. Geosci. Remote Sens. 2006, 44, 936–942. [Google Scholar] [CrossRef]
- Kim, J.W.; Lu, Z.; Gutenberg, L.; Zhu, Z. Characterizing hydrologic changes of the Great Dismal Swamp using SAR/InSAR. Remote Sens. Environ. 2017, 198, 187–202. [Google Scholar] [CrossRef]
- Neumann, M.; Saatchi, S.S.; Ulander, L.M.H.; Fransson, R.E.S. Assessing performance of L- and P-band polarimetric interferometric SAR data in estimating boreal forest above-ground biomass. IEEE Trans. Geosci. Remote Sens 2012, 50, 714–726. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Tanase, M.A.; Bourgeau-Chavez, L.L.; Borr, M. Soil moisture limitations on monitoring boreal forest regrowth using spaceborne L-band SAR data. Remote Sens. Environ. 2011, 115, 227–232. [Google Scholar] [CrossRef]
- Kim, J.-W.; Lu, Z.; Lee, H.; Shum, C.K.; Swarzenski, C.M.; Doyle, T.W.; Baek, S.-H. Integrated Analysis of PALSAR/Radarsat-1 InSAR and ENVISAT Altimeter Data for Mapping of Absolute Water Level Changes in Louisiana Wetlands. Remote Sens. Environ. 2009, 113, 2356–2365. [Google Scholar] [CrossRef]
- Bronner, E.; Gulliot, A.; Picot, N.; Noubel, J. SARAL/AltiKa Products Handbook; SALP-MU-M-OP-15984-CN; Centre National d’Etudes Spatiales: Toulouse, France, 2013. [Google Scholar]
- Japan Aerospace Exploration Agency. ALOS Data Users Handbook; Revision C; Japan Aerospace Exploration Agency: Tokyo, Japan, 2008.
- Lee, H.; Yuan, T.; Jung, H.C.; Beighley, E. Mapping wetland water depths over the central Congo Basin using PALSAR ScanSAR, envisat altimetry, and MODIS VCF data. In Remote Sensing of Environment; Elsevier: New York City, NY, USA, 2014. [Google Scholar]
- Arnesen, A.S.; Silva, T.S.F.; Hess, L.L.; Novo, E.M.L.M.; Rudorff, C.M.; Chapman, B.D.; McDonald, K.C. Monitoring flood extent in the Lower Amazon River floodplain using ALOS/PALSAR ScanSAR images. Remote. Sens. Environ. 2013, 130, 51–61. [Google Scholar] [CrossRef]
- Bamler, R.; Eineder, M. ScanSAR processing using standard high precision SAR algorithms. IEEE Trans. Geosci. Remote Sens. 1996, 34, 212–218. [Google Scholar] [CrossRef]
- Krieger, G.; Hajnsek, I.; Papathanassiou, K.; Eineder, M.; Younis, M.; de Zan, F.; Huber, S.; Lopez-Dekker, P.; Prats, P.; Werner, M. Tandem-L: An innovative interferometric and polarimetric SAR mission to monitor Earth system dynamics with high resolution. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 253–256. [Google Scholar]
- Rosen, P.; Hensley, S.; Shaffer, S.; Edelstein, W.; Kim, Y.; Kumar, R.; Misra, T.; Bhan, R.; Satish, R.; Sagi, R. An update on the NASA-ISRO dual-frequency DBF SAR (NISAR) mission. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Liang, C.; Fielding, E.J. Interferometry with ALOS-2 fullaperture ScanSAR data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2739–2750. [Google Scholar] [CrossRef]
- Liang, C.; Fielding, E.J. Interferometric processing of ScanSAR data using stripmap processor: New insights from coregistration. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4343–4354. [Google Scholar] [CrossRef]
- Meyer, F.; Bamler, R.; Jakowski, N.; Fritz, T. The potential of low-frequency SAR systems for mapping ionospheric TEC distributions. IEEE Geosci. Remote Sens. Lett. 2006, 3, 560–564. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Kluwer: Norwell, MA, USA, 2002. [Google Scholar]
- Shim, J.S. Analysis of Total Electron Content (TEC) Variations in the Low- and Middle-Latitude Ionosphere. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2009. [Google Scholar]
- Fattahi, H.; Simons, M.; Agram, P. InSAR Time-Series Estimation of the Ionospheric Phase Delay: An Extension of the Split Range-Spectrum Technique. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5984–5996. [Google Scholar] [CrossRef]
- Brcic, R.; Parizzi, A.; Eineder, M.; Bamler, R.; Meyer, F. Estimation and compensation of ionospheric delay for SAR interferometry. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 2908–2911. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Chen, C. Measurement and mitigation of the ionospheric in L-band interferometric SAR data. In Proceedings of the 2010 IEEE Radar Conference, Washington, DC, USA, 10–14 May 2010; pp. 1459–1463. [Google Scholar]
- Gomba, G.; Parizzi, A.; Zan, F.D.; Eineder, M.; Bamler, R. Toward operational compensation of ionospheric effects in SAR interferograms: The split-spectrum method. IEEE Trans. Geosci. Remote Sens 2016, 54, 1446–1461. [Google Scholar] [CrossRef]
- Gomba, G.; Rodriguez, F.; de Zan, F. Ionospheric Phase Screen Compensation for the Sentinel-1 TOPS and ALOS-2 ScanSAR Modes. IEEE Trans. Geosci. Remote Sens. 2017, 55, 223–235. [Google Scholar] [CrossRef]
- Gomba, G.; de Zan, F. Bayesian Data Combination for the Estimation of Ionospheric Effects in SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6582–6593. [Google Scholar] [CrossRef]
- Liang, C.; Fielding, E.J. Measuring azimuth deformation with L-band ALOS-2 ScanSAR interferometry. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2725–2738. [Google Scholar] [CrossRef]
- Raucoules, D.; de Michele, M. Assessing ionospheric influence on L-band SAR data: Implications on coseismic displacement measurements of the 2008 Sichuan earthquake. IEEE Geosci. Remote Sens. Lett. 2010, 7, 286–290. [Google Scholar] [CrossRef]
- Jung, H.S.; Lee, D.T.; Lu, Z.; Won, J.S. Ionospheric Correction of SAR Interferograms by Multiple-Aperture Interferometry. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3191–3199. [Google Scholar] [CrossRef]
- Chen, A.C.; Zebker, H.A. Reducing Ionospheric Effects in InSAR Data Using Accurate Coregistration. IEEE Trans. Geosci. Remote Sens. 2014, 52, 60–70. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A.; Werner, C.L. Satellite radar interferometry: Two-dimensional phase unwrapping. Radio Sci. 1988, 23, 713–720. [Google Scholar] [CrossRef]
- Rosen, P.A.; Werner, C.W.; Hiramatsu, A. Two-dimensional phase unwrapping of SAR interferograms by charge connection through neutral trees. In Proceedings of the IGARSS’94, Pasadena, CA, USA, 8–12 August 1994. [Google Scholar]
- Yu, H.; Lee, H.; Yuan, T.; Cao, N. A novel method for deformation estimation based on multi-baseline InSAR phase unwrapping. IEEE Trans. Geosci. Remote Sens. 2018. to be published. [Google Scholar] [CrossRef]
- Cao, N.; Yu, H.; Lee, H. A Multi-baseline InSAR Phase Unwrapping Method using Designed Optimal Baselines obtained by Motion Compensation Algorithm. IEEE Geosci. Remote Sens. Lett. 2018. to be published. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Master-Slave Dates (yyyymmdd) | Perpendicular Baseline (m) | Incidence Angle (°) |
|---|---|---|
| 20150222–20150405 | 111 | 39 |
| 20150405–20150517 | 21 | 39 |
| 20150517–20150628 | 209 | 39 |
| 20150628–20150726 | 159 | 39 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, N.; Lee, H.; Jung, H.C.; Yu, H. Estimation of Water Level Changes of Large-Scale Amazon Wetlands Using ALOS2 ScanSAR Differential Interferometry. Remote Sens. 2018, 10, 966. https://doi.org/10.3390/rs10060966
Cao N, Lee H, Jung HC, Yu H. Estimation of Water Level Changes of Large-Scale Amazon Wetlands Using ALOS2 ScanSAR Differential Interferometry. Remote Sensing. 2018; 10(6):966. https://doi.org/10.3390/rs10060966
Chicago/Turabian StyleCao, Ning, Hyongki Lee, Hahn Chul Jung, and Hanwen Yu. 2018. "Estimation of Water Level Changes of Large-Scale Amazon Wetlands Using ALOS2 ScanSAR Differential Interferometry" Remote Sensing 10, no. 6: 966. https://doi.org/10.3390/rs10060966
APA StyleCao, N., Lee, H., Jung, H. C., & Yu, H. (2018). Estimation of Water Level Changes of Large-Scale Amazon Wetlands Using ALOS2 ScanSAR Differential Interferometry. Remote Sensing, 10(6), 966. https://doi.org/10.3390/rs10060966