Millimeter-Wave InSAR Image Reconstruction Approach by Total Variation Regularized Matrix Completion


Abstract
:1. Introduction
2. Millimeter-Wave InSAR Imaging Principle
3. InSAR-TVMC Imaging Approach
3.1. Principles of MC
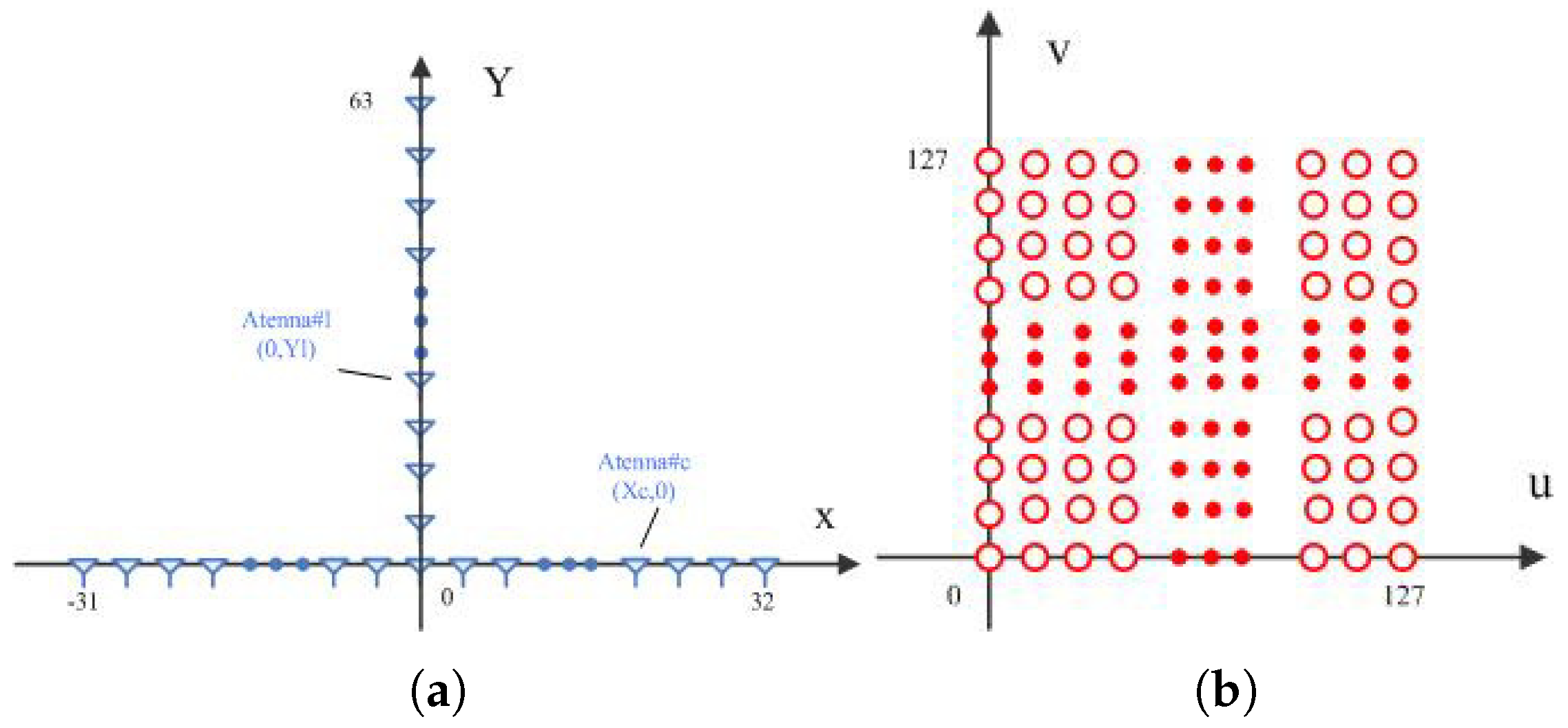
3.2. Signal Model of InSAR-TVMC
3.3. Recovery Method of InSAR-TVMC
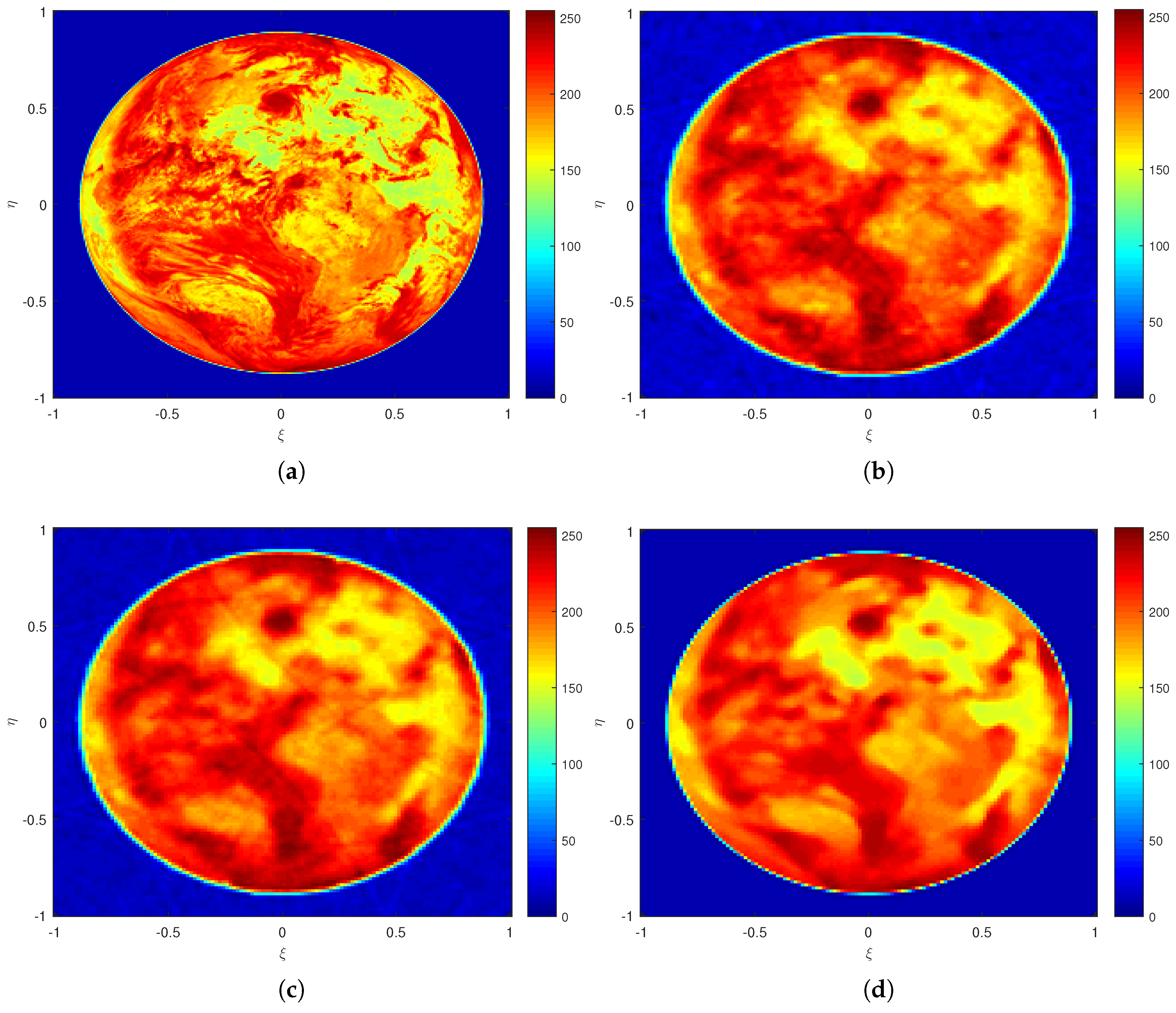
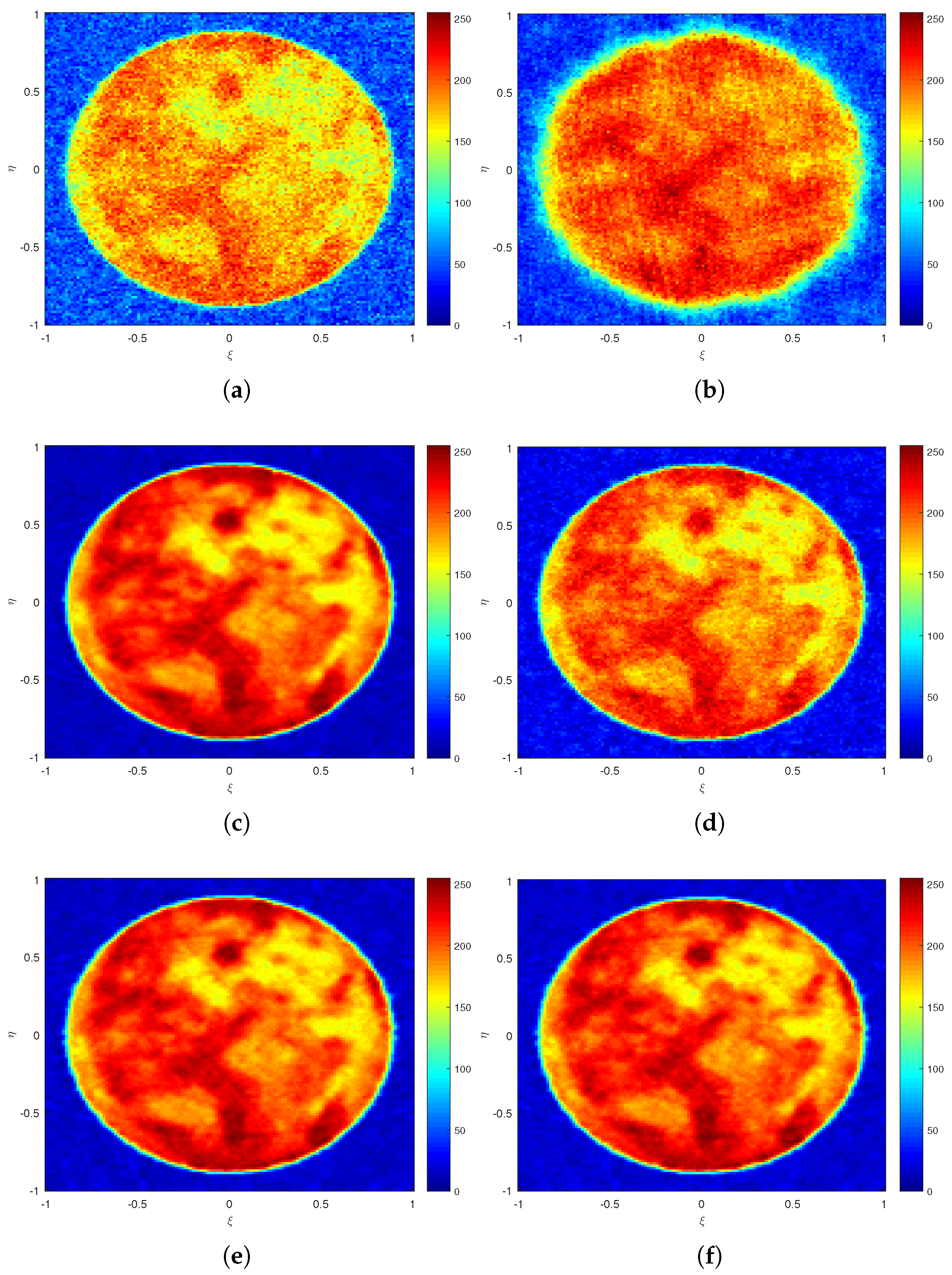
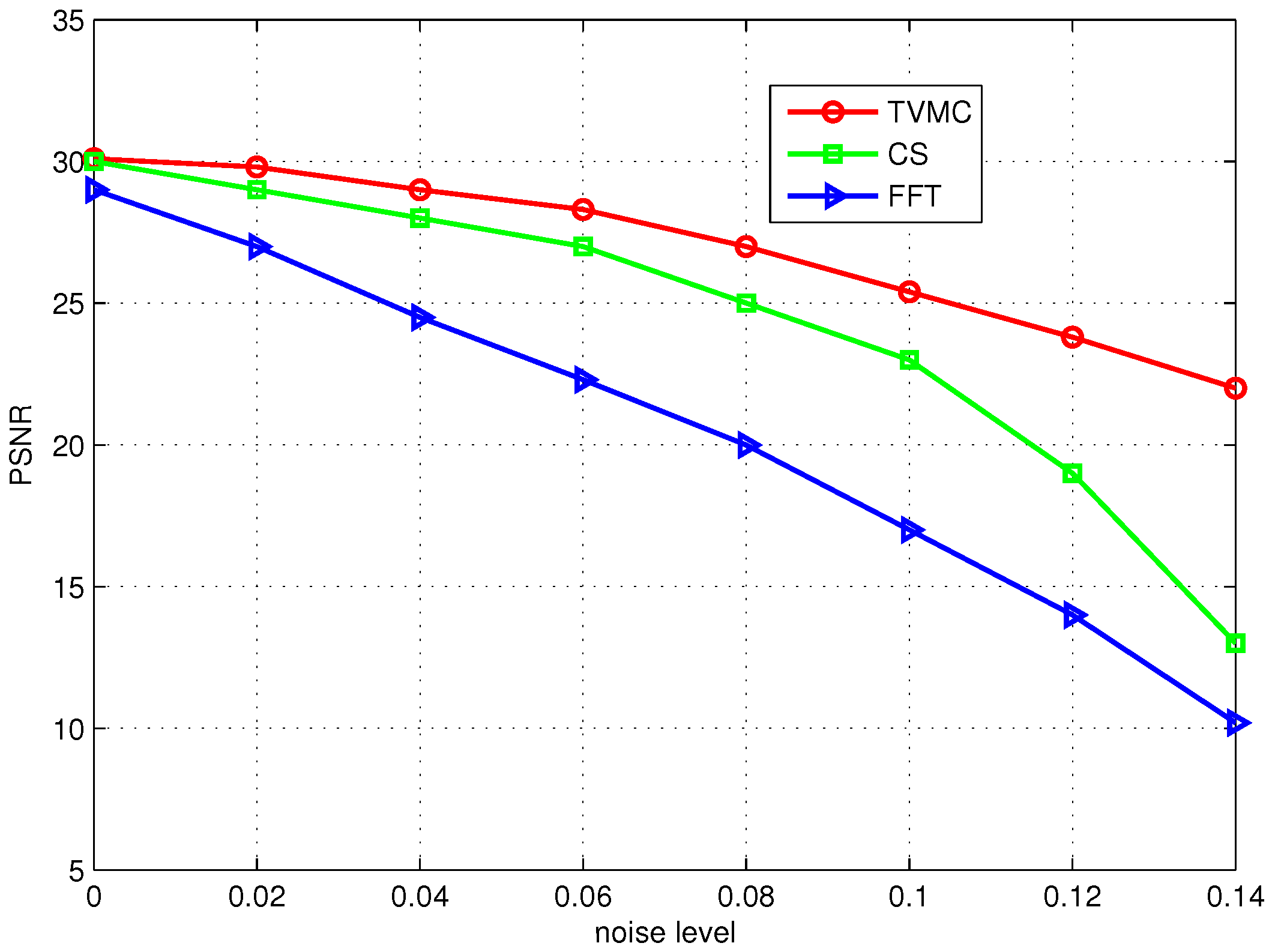
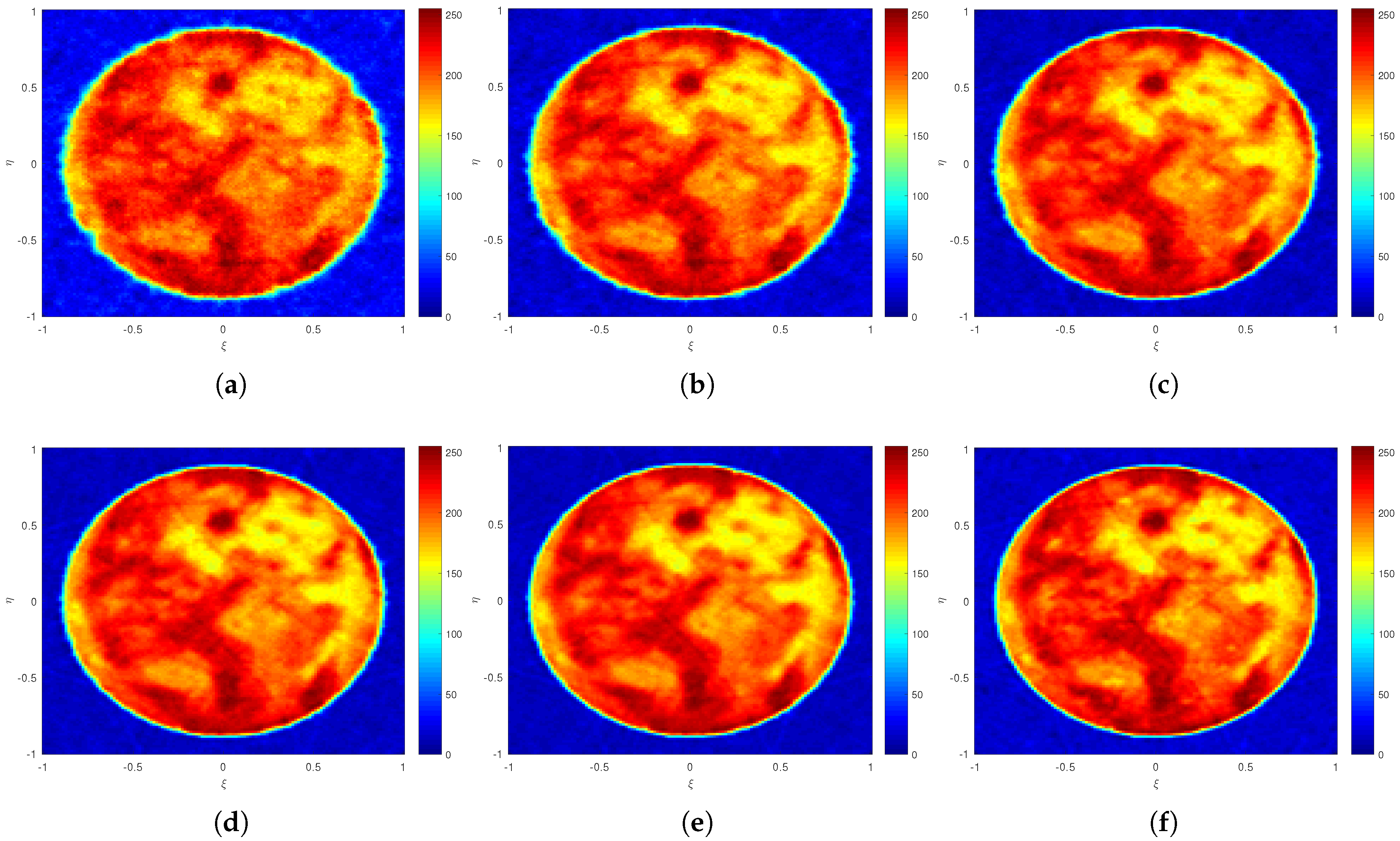
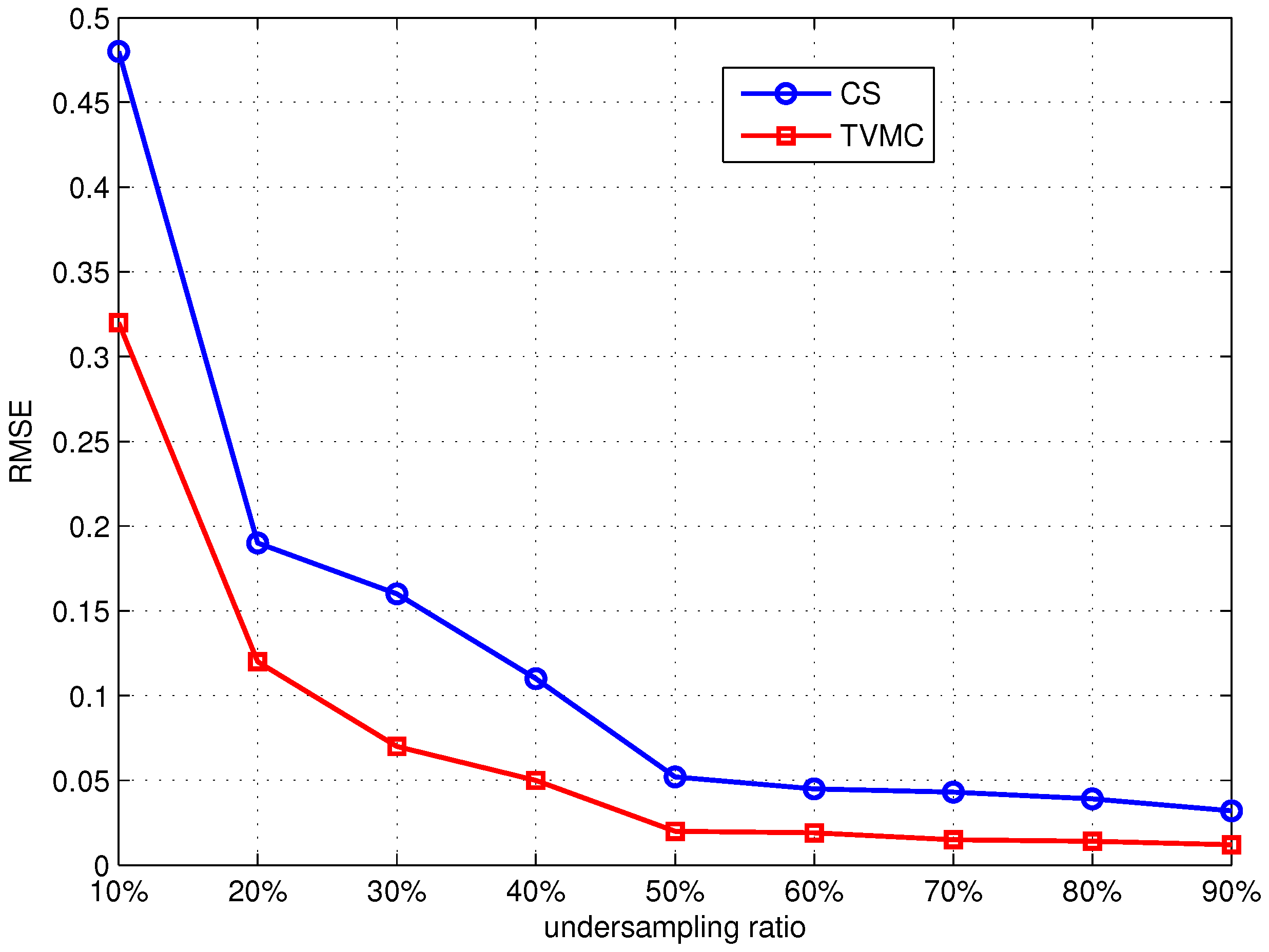
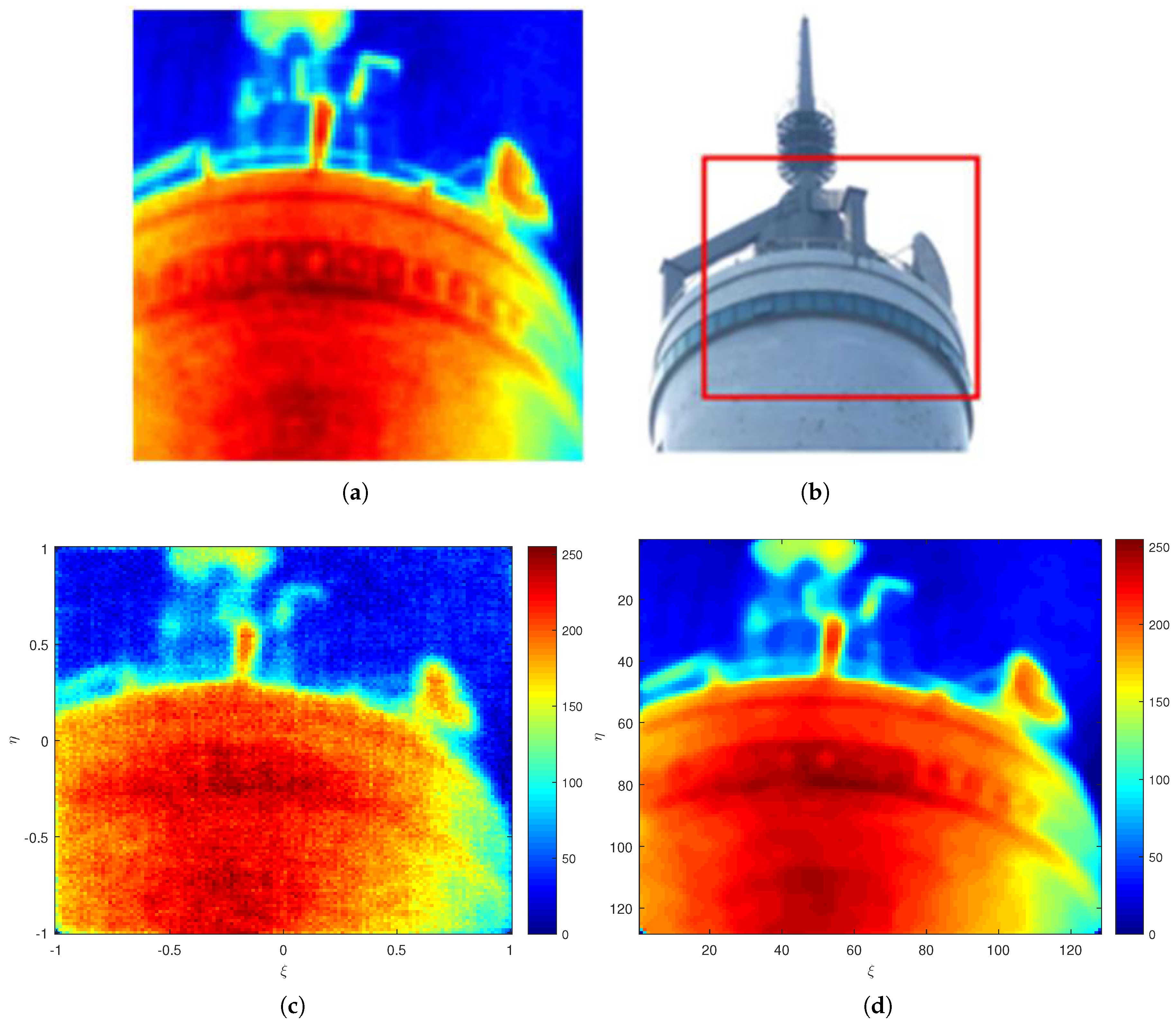
4. Experiments and Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ruf, C.S.; Swift, C.T.; Tanner, A.B.; Le Vine, D.M. Interferometric synthetic aperture microwave radiometry for the remote sensing of the Earth. IEEE Trans. Geosci. Remote Sens. 1988, 26, 597–611. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Martinuzzi, J.; Font, J.; Berger, M. Soil moisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2002, 39, 1729–1735. [Google Scholar] [CrossRef]
- Reising, S.C.; Gaier, T.C.; Kummerow, C.D.; Padmanabhan, S.; Lim, B.H.; Brown, S.T.; Heneghan, C.; Chandra, C.V.; Olson, J.; Berg, W. Temporal Experiment for Storms and Tropical Systems Technology Demonstration (TEMPEST-D): Reducing risk for 6U-Class nanosatellite constellations. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 5559–5560. [Google Scholar] [CrossRef]
- Chen, H.M.; Lee, S.R.; Rao, M.; Slamani, M.A.; Varshney, P.K. Imaging for concealed weapon detection: A tutorial overview of development in imaging sensors and processing. IEEE Signal Proc. Mag. 2005, 22, 52–61. [Google Scholar] [CrossRef]
- Corbella, I.; Duffo, N.; Vall-llossera, M.; Camps, A.; Torres, F. The visibility function in interferometric aperture synthesis radiometry. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1677–1682. [Google Scholar] [CrossRef] [Green Version]
- Chang, S.G.; Yu, B.; Vetterli, M. Adaptive wavelet thresholding for image denoising and compression. IEEE Trans. Image Process. 2000, 9, 1532–1546. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mignotte, M. A segmentation-based regularization term for image deconvolution. IEEE Trans. Image Process. 2006, 15, 1973–1984. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ramani, S.; Thevenaz, P.; Unser, M. Regularized interpolation for noisy images. IEEE Trans. Med. Imag. 2010, 29, 543–558. [Google Scholar] [CrossRef] [PubMed]
- Picard, B.; Anterrieu, E. Comparison of regularized inversion methods in synthetic aperture imaging radiometry. IEEE Trans. Geosci. Remote Sens. 2005, 43, 218–224. [Google Scholar] [CrossRef]
- Wu, L.; Hu, F.; He, F.; Li, J.; Peng, X.; Zhu, D. Statistical regularization in synthetic aperture imaging radiometry. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 4726–4729. [Google Scholar] [CrossRef]
- Wu, L.; Hu, F.; He, F.; Li, J. Bayesian inference for inversion in synthetic aperture imaging radiometry. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1049–1053. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inform. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Near-optimal signal recovery from random projections: Universal encoding strategies. IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Li, S.Y.; Zhou, X.; Ren, B.; Sun, H.J.; Lv, X. A compressive sensing approach for synthetic aperture imaging radiometers. Prog. Electromagn. Res. 2013, 135, 583–599. [Google Scholar] [CrossRef]
- Chen, J.F.; Li, Y.H. The CS-Based imaging algorithm for near-Field synthetic aperture imaging radiometer. Prog. Electromagn. Res. 2014, 97, 911–914. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Li, Y.H.; Zhu, S.J.; Li, Y. A robust reweighted L1-minimization imaging algorithm for passive millimeter-wave sair in near field. Sensors 2015, 15, 24945–24960. [Google Scholar] [CrossRef] [PubMed]
- Kpre, E.L.; Decroze, C. Passive Coding Technique Applied to Synthetic Aperture Interferometric Radiometer. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1193–1197. [Google Scholar] [CrossRef]
- Candes, E.J.; Recht, B. Exact matrix completion via convex optimization. Found. Comput. Math. 2008, 9, 717–772. [Google Scholar] [CrossRef]
- Candes, E.J.; Plan, Y. Matrix completion with noise. Proc. IEEE 2010, 98, 925–936. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. The power of convex relaxation: Near-optimal matrix completion. IEEE Trans. Inf. Theory 2010, 56, 2053–2080. [Google Scholar] [CrossRef]
- Sun, S.Q.; Bajwa, W.U.; Petropulu, A.P. MIMO-MC radar: A MIMO radar approach based on matrix completion. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1839–1852. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Liao, G.S.; Zhu, S.Q.; Yang, X.; Zhang, X. SAR imaging with undersampled data via matrix completion. IEEE Geosci. Remote Sens. Lett. 2014, 14, 1539–1543. [Google Scholar] [CrossRef]
- Chambolle, A. An algorithm for total variation minimization and applications. J. Math. Imaging Vis. 2004, 20, 89–97. [Google Scholar] [CrossRef]
- Sidky, E.Y.; Pan, X. Image reconstruction in circular cone-beam computed tomography by constrained, total-variation minimization. Phys. Med. Biol. 2008, 53, 4777–4807. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Peng, J.; Zhao, Q.; Leung, Y.; Zhao, X.L.; Meng, D. Hyperspectral image restoration via total variation regularized low-rank tensor decomposition. IEEE J-STARS. 2017, 99, 1–19. [Google Scholar] [CrossRef]
- Yao, J.W.; Xu, Z.; Huang, X.L.; Huang, J. An efficient algorithm for dynamic MRI using low-rank and total variation regularizations. Med. Image Anal. 2018, 44, 14–27. [Google Scholar] [CrossRef] [PubMed]
- Anterrieu, E. A resolving matrix approach for synthetic aperture imaging radiometers. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1649–1656. [Google Scholar] [CrossRef]
- Fazel, M.; Pong, T.K.; Sun, D.; Tseng, P. Hankel matrix rank minimization with applications to system identification and realization. SIAM J. Matrix Anal. Appl. 2013, 34, 946–977. [Google Scholar] [CrossRef]
- Chen, J.F.; Li, Y.H.; Zhang, Y.L. An accurate imaging algorithm for millimeter-wave synthetic aperture imaging radiometer in near-field. Prog. Electromagn. Res. 2013, 141, 517–535. [Google Scholar] [CrossRef]
- Chambolle, A.; Pock, T. On the ergodic convergence rates of a first-order primal-dual algorithm. Math. Program. 2016, 159, 253–287. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Cai, J.F.; Candes, E.J.; Shen, Z. A Singular Value Thresholding Algorithm for Matrix Completion. SIAM J. Optimiz. 2008, 20, 1956–1982. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, H.; Wu, J.; Zhang, S.; Yan, J.; Niu, L.; Sun, W.; Li, H. Imaging analysis and first results of the geostationary interferometric microwave sounder demonstrator. IEEE Trans. Geosci. Remote Sens. 2015, 53, 207–218. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: D1, D2, V, , , N |
| Output: brightness temperature |
| Algorithm: |
| Step 1: initialize , , and undersample to obtain ; |
| Step 2: update by using Equations (31) and (34); |
| Step 3: update by using Equations (37) and (38); |
| Step 4: , if , repeat from Step 2; otherwise, go to Step 5; |
| Step 5: output |
| Simulation Parameters | Value |
|---|---|
| center frequency | 50.3 GHz |
| bandwidth | 200 MHz |
| image pixel size | 128 × 128 |
| image gray | (0, 255) |
| brightness temperature | 2.73~350 K |
| antenna array (“T” shaped) | 64 + 63 |
| visibility function samples size | 128 × 128 |
| G matrix size | 16,384 × 1 |
| D matrix size | 128 × 128 |
| Undersampling Rate | 40% | 50% | 60% | 70% | 80% | 90% |
|---|---|---|---|---|---|---|
| 65.87 | 81.86 | 119.34 | 141.58 | 166.53 | 180.45 | |
| 33.91 | 46.76 | 65.31 | 80.33 | 94.22 | 103.74 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Miao, W.; Lin, Z.; Gao, H.; Shi, S. Millimeter-Wave InSAR Image Reconstruction Approach by Total Variation Regularized Matrix Completion. Remote Sens. 2018, 10, 1053. https://doi.org/10.3390/rs10071053
Zhang Y, Miao W, Lin Z, Gao H, Shi S. Millimeter-Wave InSAR Image Reconstruction Approach by Total Variation Regularized Matrix Completion. Remote Sensing. 2018; 10(7):1053. https://doi.org/10.3390/rs10071053
Chicago/Turabian StyleZhang, Yilong, Wei Miao, Zhenhui Lin, Hao Gao, and Shengcai Shi. 2018. "Millimeter-Wave InSAR Image Reconstruction Approach by Total Variation Regularized Matrix Completion" Remote Sensing 10, no. 7: 1053. https://doi.org/10.3390/rs10071053
APA StyleZhang, Y., Miao, W., Lin, Z., Gao, H., & Shi, S. (2018). Millimeter-Wave InSAR Image Reconstruction Approach by Total Variation Regularized Matrix Completion. Remote Sensing, 10(7), 1053. https://doi.org/10.3390/rs10071053