Management Recommendation Generation for Areas Under Forest Restoration Process through Images Obtained by UAV and LiDAR

 , , , ,
, , , ,
Abstract
:
1. Introduction
2. Materials and Methods
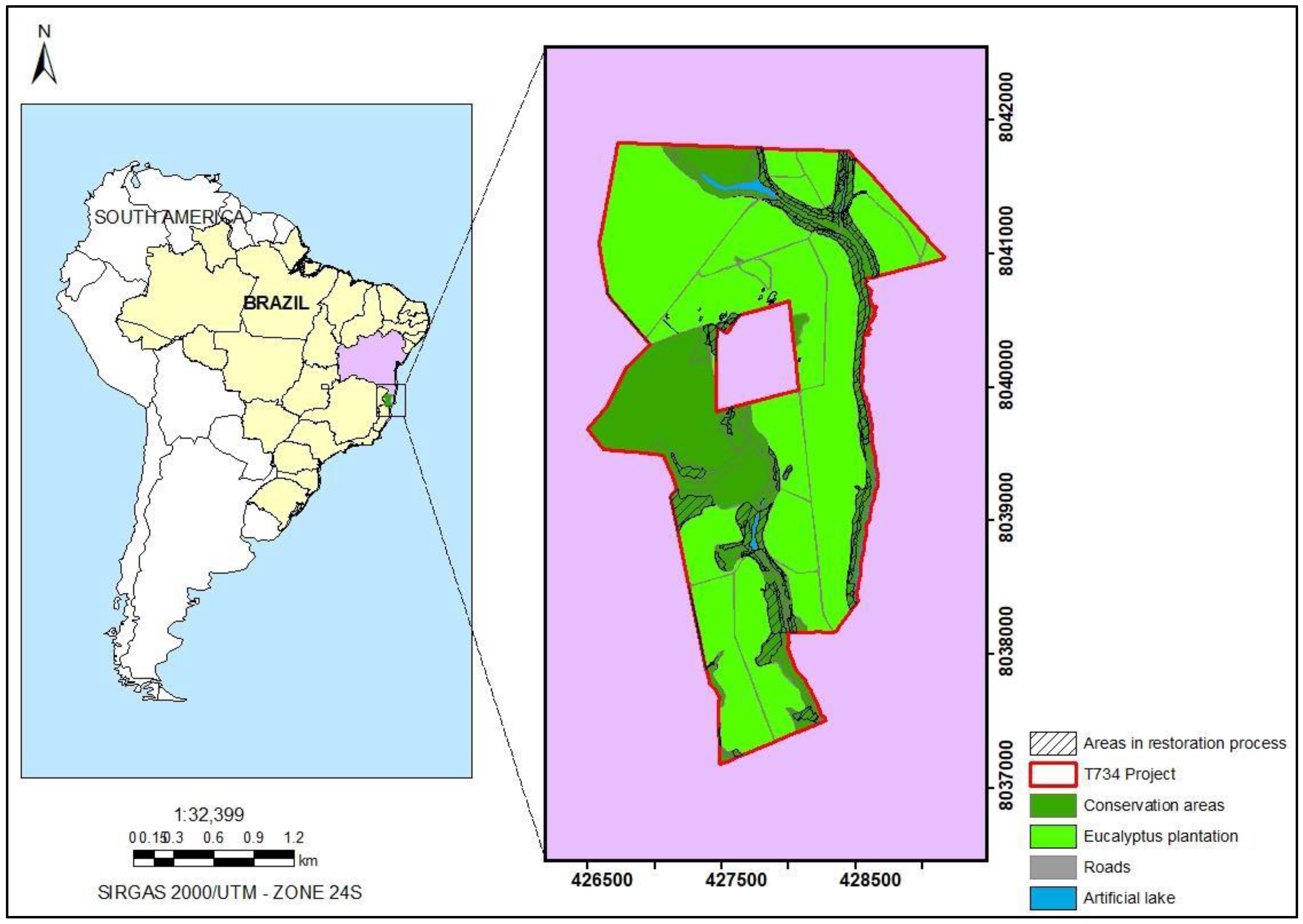
2.1. Study Site
2.2. Land Cover Monitoring
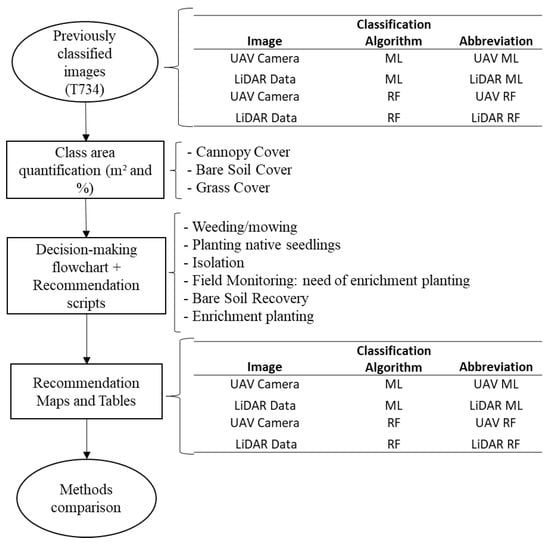
2.3. Generation of Management Recommendation
2.4. Comparison of the Generated Recommendations for Each Classified Image
3. Results
3.1. Class Area Quantification
3.2. Management Recommendation Elaboration
3.3. Management Recommendation Maps and Methods Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Society for Ecological Restoration International—SER; Society for Ecological Restoration International, Science and Policy Working Group. The SER Primer on Ecological Restoration. 2004. Available online: http://www.ser.org/ (accessed on 20 April 2017).
- Li, T.; Lü, Y.; Fu, B.; Comber, A.J.; Harris, P.; Wu, L. Gauging policy-driven large-scale vegetation restoration programmes under a changing environment: Their effectiveness and socio-economic relationships. Sci. Total Environ. 2017, 607, 911–919. [Google Scholar] [CrossRef] [PubMed]
- United Nations Environment Programme. New UN Decade on Ecosystem Restoration Offers Unparalleled Opportunity for Job Creation, Food Security and Addressing Climate Change. 2019. Available online: https://www.unenvironment.org/news-and-stories/press-release/new-un-decade-ecosystem-restoration-offers-unparalleled-opportunity (accessed on 14 March 2019).
- Rodrigues, R.R.; Lima, R.A.; Gandolfi, S.; Nave, A.G. On the restoration of high diversity forests: 30 years of experience in the Brazilian Atlantic Forest. Biol. Conserv. 2009, 142, 1242–1251. [Google Scholar] [CrossRef]
- Ruiz-Jaen, M.C.; Aide, T.M. Restoration success: How is it being measured? Restor. Ecol. 2005, 13, 569–577. [Google Scholar] [CrossRef]
- Melo, F.P.L.; Pinto, S.R.R.; Brancalion, P.H.S.; Castro, P.S.; Rodrigues, R.R.; Aronson, J.; Tabarelli, M. Priority setting for scaling-up tropical forest restoration projects: Early lessons from the Atlantic Forest Restoration Pact. Environ. Sci. Policy 2013, 33, 395–404. [Google Scholar] [CrossRef]
- Atlantic Forest Restoration Pact (Pacto pela Restauração da Mata Atlântica). Protocolo de Monitoramento Para Programas e Projetos de Restauração Florestal (Monitoring Protocol for Forest Restoration Projects). 2013. Available online: http://media.wix.com/ugd/5da841_c228aedb71ae4221bc95b909e0635257.pdf (accessed on 3 July 2017).
- Viani, R.A.; Holl, K.D.; Padovezi, A.; Strassburg, B.B.; Farah, F.T.; Garcia, L.C.; Chaves, R.B.; Rodrigues, R.R.; Brancalion, P.H. Protocol for monitoring tropical forest restoration: Perspectives from the Atlantic fores restoration pact in Brazil. Trop. Conserv. Sci. 2017, 10. [Google Scholar] [CrossRef]
- Zahawi, R.A.; Dandois, J.P.; Holl, K.D.; Nadwodny, D.; Reid, J.L.; Ellis, E.C. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biol. Conserv. 2015, 186, 287–295. [Google Scholar] [CrossRef] [Green Version]
- Reif, M.K.; Theel, H.J. Remote sensing for restoration ecology: Application for restoring degraded, damaged, transformed, or destroyed ecosystems. Int. Environ. Assess. Manag. 2017, 13, 614–630. [Google Scholar] [CrossRef]
- Reis, B.P.; Martins, S.V.; Fernandes Filho, E.I.; Sarcinelli, T.S.; Gleriani, J.M.; Leite, H.G.; Halassy, M. Forest restoration monitoring through digital processing of high resolution images. Ecol. Eng. 2019, 127, 178–186. [Google Scholar] [CrossRef]
- Shu-Hsien, L. Expert system methodologies and applications—A decade review from 1995 to 2004. Expert Syst. Appl. 2005, 28, 93–103. [Google Scholar] [CrossRef]
- Lopes, M.H.B.D.M.; Higa, R. Desenvolvimento de um sistema especialista para identificação de diagnósticos de enfermagem relacionados com a eliminação urinária. Revista Brasileira de Enfermagem 2005, 58, 27–32. [Google Scholar] [CrossRef]
- Zonete, M.F.; Rodriguez, L.C.E.; Packalén, P. Estimação de parâmetros biométricos de plantios clonais de eucalipto no sul da Bahia: Uma aplicação da tecnologia laser aerotransportada. Sci. For. 2010, 38, 225–235. [Google Scholar]
- Almeida, T.M.; Moreau, A.M.S.S.; Moreau, M.S.; Pires, M.D.M.; Fontes, E.D.O.; Góes, L.M. Reorganização socioeconômica no extremo sul da Bahia decorrente da introdução da cultura do eucalipto. Soc. Nat. 2008, 20, 5–18. [Google Scholar] [CrossRef]
- Costa, O.V.; Cantarutti, R.B.; Fontes, L.E.F.; Costa, L.D.; Nacif, P.G.S.; Farias, J.C. Estoque de carbono do solo sob pastagem em área de tabuleiro costeiro no sul da Bahia. Revista Brasileira de Ciência do Solo 2009, 33, 1137–1145. [Google Scholar] [CrossRef]
- Saporetti Junior, A.W.; Schaefer, C.E.G.R.; Souza, A.L.; Soares, M.P.; Araújo, D.S.D.; Meira-Neto, J.A.A. Influence of soil physical properties on plants of mussununga ecosystem, Brazil. Folia Geobot. 2012, 47, 29–39. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. In Proceedings of the 3rd ERTS Symposium, published by NASA, Washington, DC, USA, 10–14 December 1973; Volume I, pp. 309–317. [Google Scholar]
- Huete, A.R. A soil adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- ESRI, Environmental Systems Research Institute. ArcGIS for Desktop; Version 10.3; ESRI: Redlands, CA, USA, 2015. [Google Scholar]
- Song, J.H.; Han, S.H.; Yu, K.Y.; Kim, Y.I. Assessing the possibility of land-cover classification using LIDAR intensity data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 259–263. [Google Scholar]
- Fibria Celulose, S.A. Manual de Restauração Ambiental; Bahia, Brasil, 2016; Available online: https://www.mpba.mp.br/sites/default/files/biblioteca/meio-ambiente/downloads/2016/manual_restauracao_ecologica_2016.pdf (accessed on 01 April 2017).
- Harris, C.J.; Leishman, M.R.; Fryirs, K.; Kyle, G. How does restoration of native canopy affect understory vegetation composition? evidence from riparian communities of the Hunter Valley Australia. Restor. Ecol. 2012, 20, 584–592. [Google Scholar] [CrossRef]
- Muñoz-Rojas, M.; Erickson, T.E.; Dixon, K.W.; Merritt, D.J. Soil quality indicators to assess functionality of restored soils in degraded semiarid ecosystems. Restor. Ecol. 2016, 24, S43–S52. [Google Scholar] [CrossRef]
- Almeida, D.R.A.; Stark, S.C.; Chazdon, R.; Nelson, B.W.; Cesar, R.G.; Meli, P.; Gorgens, E.B.; Duarte, M.M.; Valbuena, R.; Moreno, V.S.; et al. The effectiveness of lidar remote sensing for monitoring forest cover attributes and landscape restoration. For. Ecol. Manag. 2019, 438, 34–43. [Google Scholar] [CrossRef]
- Ockendon, N.; Thomas, D.H.L.; Cortina, J.; Adams, W.M.; Aykroyd, T.; Barov, B.; Boitani, L.; Bonn, A.; Branquinho, C.; Brombacher, M.; et al. One hundred priority questions for landscape restoration in Europe. Biol. Conserv. 2018, 221, 198–208. [Google Scholar] [CrossRef]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef]
- Adeline, K.R.M.; Chen, M.; Briottet, X.; Pang, S.K.; Paparoditis, N. Shadow detection in very high spatial resolution aerial images: A comparative study. ISPRS J. Photogramm. Remote Sens. 2013, 80, 21–38. [Google Scholar] [CrossRef]
- Movia, A.; Beinat, A.; Crosilla, F. Shadow detection and removal in RGB VHR images for land use unsupervised classification. ISPRS J. Photogramm. Remote Sens. 2016, 119, 485–495. [Google Scholar] [CrossRef]
- Rodrigues, R.R.; Gandolfi, S.; Nave, A.G.; Aronson, J.; Barreto, T.E.; Vidal, C.Y.; Brancalion, P.H. Large-scale ecological restoration of high diversity tropical forests in SE Brazil. For. Ecol. Manag. 2011, 261, 1605–1613. [Google Scholar] [CrossRef]
- Rocha-Nicoleite, E.; Overbeck, G.E.; Müller, S.C. Degradation by coal mining should be priority in restoration planning. Perspect. Ecol. Conserv. 2017, 15, 197–200. [Google Scholar] [CrossRef]
- Holl, K.D.; Loik, M.E.; Lin, E.H.V.; Samuels, I.A. Tropical montane forest restoration in Costa Rica: Overcoming barriers to dispersal and establishment. Restor. Ecol. 2000, 8, 339–349. [Google Scholar] [CrossRef]
- Kitamura, A.E.; Alves, M.C.; Suzuki, L.G.A.S.; Paz Conzalez, A. Recuperação de um solo degradado com a aplicação de adubos verdes e lodo de esgoto. Revista Brasileira de Ciência do Solo. Sociedade Brasileira de Ciência do Solo 2008, 32, 405–416. [Google Scholar] [CrossRef]
- Hummel, S.; Hudak, A.T.; Uebler, E.H.; Falkowski, M.J.; Megown, K.A. A comparison of accuracy and cost of LiDAR versus stand exam data for landscape management on the Malheur National Forest. J. For. 2011, 109, 267–273. [Google Scholar]
- Tilley, B.K.; Munn, I.A.; Evans, D.L.; Parker, R.C.; Roberts, S.D. Cost considerations of using Lidar for timber inventory. In Proceedings of the Annual southern forest economics workshop, 14–16 March 2004; Alavalapati, J.R.R., Carter, D.R., Eds.; University of Florida: St. Augustine, FL, USA; pp. 43–50. [Google Scholar]
- Andrade, M.S.; Gorgens, E.B.; Reis, C.R.; Cantinho, R.Z.; Assis, M.; Sato, L.; Ometto, J.P.H.B. Airborne laser scanning for terrain modeling in the Amazon forest. Acta Amazon. 2018, 48, 271–279. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class/Indicator | Reference Values | Categorization |
|---|---|---|
| Canopy cover | 0–59% | Needs intervention |
| 60–69% | Verify intervention by analyzing other indicators | |
| ≥70% | Suitable | |
| Bare soil | 0–0.09 ha | Suitable |
| ≥0.1 ha | Needs intervention | |
| Grass cover | 0–35% | Suitable |
| ≥35% | Needs intervention |
| Method | Bare Soil (%) | Grass (%) | Canopy (%) | Shadow (%) |
|---|---|---|---|---|
| LiDAR RF | 10.6 | 48.6 | 40.8 | - |
| LiDAR ML | 9.6 | 42.0 | 48.3 | - |
| UAV RF | 6.9 | 44.5 | 45.7 | 2.8 |
| UAV ML | 5.6 | 44.8 | 45.4 | 4.1 |
| Location | Situation | Area Total (ha) | Bare Soil (m²) | Canopy Cover (%) | Grass Cover (%) | Management Recommendation |
|---|---|---|---|---|---|---|
| T734/068A | Area in restoration process | 0.79 | 2433 | 28.5 | 37.2 | Weed control + Plant seedling + Bare soil recovery |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reis, B.P.; Martins, S.V.; Fernandes Filho, E.I.; Sarcinelli, T.S.; Gleriani, J.M.; Marcatti, G.E.; Leite, H.G.; Halassy, M. Management Recommendation Generation for Areas Under Forest Restoration Process through Images Obtained by UAV and LiDAR. Remote Sens. 2019, 11, 1508. https://doi.org/10.3390/rs11131508
Reis BP, Martins SV, Fernandes Filho EI, Sarcinelli TS, Gleriani JM, Marcatti GE, Leite HG, Halassy M. Management Recommendation Generation for Areas Under Forest Restoration Process through Images Obtained by UAV and LiDAR. Remote Sensing. 2019; 11(13):1508. https://doi.org/10.3390/rs11131508
Chicago/Turabian StyleReis, Bruna Paolinelli, Sebastião Venâncio Martins, Elpídio Inácio Fernandes Filho, Tathiane Santi Sarcinelli, José Marinaldo Gleriani, Gustavo Eduardo Marcatti, Helio Garcia Leite, and Melinda Halassy. 2019. "Management Recommendation Generation for Areas Under Forest Restoration Process through Images Obtained by UAV and LiDAR" Remote Sensing 11, no. 13: 1508. https://doi.org/10.3390/rs11131508
APA StyleReis, B. P., Martins, S. V., Fernandes Filho, E. I., Sarcinelli, T. S., Gleriani, J. M., Marcatti, G. E., Leite, H. G., & Halassy, M. (2019). Management Recommendation Generation for Areas Under Forest Restoration Process through Images Obtained by UAV and LiDAR. Remote Sensing, 11(13), 1508. https://doi.org/10.3390/rs11131508