An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections



Abstract
:
1. Introduction
2. Methods
2.1. Acquisition of GNSS Measurements
2.2. Phase-Smoothed Pseudorange
2.3. Threshold Detection for Ionosphere Delay Cumulative Error
2.4. Threshold Detection for Cycle Slip
2.5. Threshold Detection for Outliers
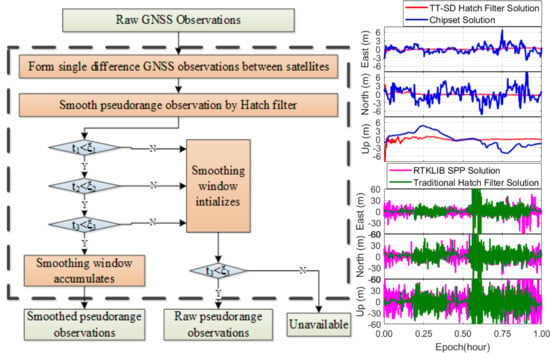
2.6. Three-Thresholds and Single-Difference Hatch Filter Algorithm
- Input raw GNSS (Global Navigation Satellite System) observations;
- Form a single-difference carrier phase and pseudorange observations between the reference satellite and non-reference satellite;
- Phase-smoothed pseudorange by Hatch filter;
- Three thresholds detection: While the difference between the smoothed pseudorange and true pseudorange (t1) is less than the threshold (ξ1) for ionosphere delay cumulative errors, the phase rate prediction residual by Doppler observations (t2) is less than the threshold (ξ2) for the cycle slip, and the difference between the pseudorange rate and the phase rate (t3) is less than the threshold (ξ3) for outliers; the smoothing window width accumulates and the smoothed pseudorange observations are available for positioning. Otherwise, the smoothing window is re-initialized.
- If the smoothing window was initialized and the condition t3 < ξ3 holds, the raw pseudorange observations are used for positioning, or else no pseudorange observations are available for positioning at this epoch.
- Repeat step 1–5 above for all epochs of GNSS observations to obtain the smoothed pseudorange observations for positioning.
2.7. Three-Thresholds and Single-Difference Hatch Filter Algorithm with Kalman Filter
3. Results
3.1. Algorithm Validation with Survey-Grade Receivers
3.2. Quality Assessment for Nexus 9 Raw GNSS Data
3.3. Static Test Using Nexus 9 Raw GNSS Data
3.4. Kinematic Test Using Nexus 9 Raw GNSS Data
4. Discussion
5. Conclusions
- The static experiment shows that the horizontal and vertical position errors of TT-SD Hatch filter solution are about 0.6 and 0.8 m in terms of RMS, respectively, after taking a few minutes to convergence. Conversely, the horizontal and vertical positioning errors of chipset solution are approximately 2.6 m and 2.5 m and vary with time. Both the SPP solution and the traditional Hatch filter solution have the position RMS exceed 10 m in horizontal and vertical components. Moreover, the smoothing effect of the traditional Hatch filter will fail when a large number of cycle-slips or gross errors in the observations appear. In contrast, the TT-SD Hatch filter can accurately detect the cycle slips and gross errors and reset the smoothed window in time, thus avoiding this problem. Meanwhile, with the aid of the Kalman filter, the TT-SD Hatch filter can achieve continuous positioning with steady accuracy.
- The kinematic experiment shows that the TT-SD Hatch filter solution can converge after a few minutes, and the 2D error is about 0.9 m, which is about 64%, 89% and 92% lower than that of the chip solution, the traditional Hatch filter solution and SPP solution, respectively. Meanwhile, the TT-SD Hatch filter solution can recover a continuous driving track but the solutions based on the other methods do not work. Moreover, traditional Hatch filter solution and SPP solution present higher-level measuring noise. However, we should note that the vehicle-borne experiment was carried out in an open and semi-open sky-view condition which cannot represent any GNSS-difficult environments. It is expected that our TT-SD Hatch filter solution will be degraded in such sorts of situations, not to mention the chipset solutions and traditional Hatch filter solutions.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yoon, D.; Kee, C.; Seo, J.; Park, B. Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones. Sensors 2016, 16, 910. [Google Scholar] [CrossRef]
- Gao, H.; Groves, P.D. Environmental Context Detection for Adaptive Navigation using GNSS Measurements from a Smartphone. J. Inst. Navig. 2018, 65, 99–116. [Google Scholar]
- Specht, C.; Dąbrowski, P.S.; Pawelski, J.; Specht, M.; Szot, T. Comparative Analysis of Positioning Accuracy of GNSS Receivers of Samsung Galaxy Smartphones in Marine Dynamic Measurements. Adv. Space Res. 2019, 63, 3018–3028. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Zhao, J.; Zhou, K.; Wang, Z.; Yuan, H. Smart Device-Supported BDS/GNSS Real-Time Kinematic Positioning for Sub-Meter-Level Accuracy in Urban Location-Based Services. Sensors 2016, 16, 2201. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Li, Z.; Yuan, H.; Zhou, K. Validation and analysis of the performance of dual-frequency single-epoch BDS/GPS/GLONASS relative positioning. Chin. Sci. Bull. 2015, 60, 857–868. (In Chinese) [Google Scholar] [CrossRef]
- Warnant, R.; Warnant, Q. Raw GNSS Measurements under Android: Data Quality Analysis. Available online: http://hdl.handle.net/2268/225378 (accessed on 30 May 2018).
- The Official Android Documentation that Lists Partial Android Devices Whose Raw GNSS Measurements. Available online: https://developer.android.com/guide/topics/sensors/gnss (accessed on 12 July 2019).
- Banville, S.; Diggeleen, F.V. Precise positioning using raw GPS measurements from Android smartphones. GPS World 2016, 27, 43–48. [Google Scholar]
- Warnant, R.; Van De Vyvere, L.; Warnant, Q. Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later. In Proceedings of the ION GNSS+ 2018, Miami, FL, USA, 24–28 September 2018; pp. 284–303. [Google Scholar]
- Asari, K.; Saito, M.; Amitani, H. SSR Assist for Smartphones with PPP-RTK Processing. In Proceedings of the ION GNSS+ 2017, Session A1: Applications of Raw GNSS Measurements from Smartphones, Portland, OR, USA, 25–29 September 2017; pp. 130–138. [Google Scholar] [CrossRef]
- Calle, D.; Carbonell, E.; Navarro, P.; Rodríguez, I.; Roldán, P.; Tobías, G. Trends, Innovations and Enhancements for Low-Cost PPP. In Proceedings of the ION GNSS+ 2017, Session A1: Applications of Raw GNSS Measurements from Smartphones, Portland, OR, USA, 25–29 September 2017; pp. 139–170. [Google Scholar] [CrossRef]
- Denis, L.; Cedric, R.; Francois-Xavier, M.; Matthieu, P. Smartphone Applications for Precise Point Positioning. In Proceedings of the ION GNSS+ 2017, Session A1: Applications of Raw GNSS Measurements from Smartphones, Portland, OR, USA, 25–29 September 2017; pp. 171–187. [Google Scholar] [CrossRef]
- Li, L.; Zhong, J.; Zhao, M. Doppler-Aided GNSS Position Estimation With Weighted Least Squares. IEEE Trans. Veh. Technol. 2011, 60, 3615–3624. [Google Scholar] [CrossRef]
- Le, A.Q.; Teunissen, P.J.G. Recursive least-squares filtering of pseudorange measurements. In Proceedings of the European Navigation Conference 2006, Manchester, UK, 7–10 May 2006; pp. 1–11. [Google Scholar]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the Third International Geodetic Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1982; pp. 1213–1231. [Google Scholar]
- Byungwoon, P.; Cheolsoon, L.; Youngsun, Y.; Euiho, K.; Changdon, K. Optimal Divergence-Free Hatch Filter for GNSS Single-Frequency Measurement. Sensors 2017, 17, 448. [Google Scholar] [CrossRef]
- Park, B.; Sohn, K.; Kee, C. Optimal Hatch Filter with an Adaptive Smoothing Window Width. J. Navig. 2008, 61, 435–454. [Google Scholar] [CrossRef]
- Kim, E.; Walter, T.; Powell, J.D. Adaptive carrier smoothing using code and carrier divergence. In Proceedings of the 2007 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 22–24 January 2007; pp. 141–152. [Google Scholar]
- Lei, D.; Lu, W.; Cui, X.; Yu, D. Carrier-Aided Smoothing for Real-Time Beidou Positioning. In Proceedings of the 2012 International Conference on Information Technology and Software Engineering. Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2013; Volume 211, pp. 29–35. [Google Scholar]
- Liu, Q.; Ying, R.; Wang, Y.; Qian, J.; Liu, P. Pseudorange Double Difference Algorithm Based on Duty-cycled Carrier Phase Smoothing on Low-Power Smart Devices. In Proceedings of the CSNC 2018: China Satellite Navigation Conference (CSNC) 2018 Proceedings; Springer: Singapore, 2018; pp. 415–430. [Google Scholar]
- Lee, H.K.; Rizos, C. Position-domain Hatch Filter for kinematic differential GPS/GNSS. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 30–40. [Google Scholar] [CrossRef]
- Shin, D.; Lim, C.; Park, B.; Yun, Y.; Kim, E.; Kee, C. Single-frequency Divergence-free Hatch Filter for the Android N GNSS Raw Measurements. In Proceedings of the ION GNSS+ 2017, Session A1: Applications of Raw GNSS Measurements from Smartphones, Portland, OR, USA, 25–29 September 2017; pp. 188–225. [Google Scholar]
- Leppäkoski, H.; Syrjärinne, J.; Takala, J. Complementary Kalman Filter for Smoothing GPS Position with GPS Velocity. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–21 September 2003; pp. 1201–1210. [Google Scholar]
- The GSA GNSS Raw Measurements Task Force. Using Gnss Raw Measurements On Android Devices; Publications Office of the European Union; European GNSS Agency: Luxembourg, 2017; pp. P20–P24. [CrossRef]
- Official Android Application for Users to Logging Raw GNSS Measurements and Chipset Solutions. Available online: https://github.com/google/gps-measurement-tools/releases (accessed on 12 July 2019).
- Cannon, M.E.; Schwarz, K.P.; Wei, M.; Delikaraoglou, D. A consistency test of airborne GPS using multiple monitor stations. Bull. Géodésique 1992, 66, 2–11. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric Time-Delay Algorithm for Single-Frequency GPS Users. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 325–331. [Google Scholar] [CrossRef]
- Saastamoninen, J. Atmospheric Correction for the Troposphere and the Stratosphere in Radio Ranging Satellites. Use Artif. Satell. Geod. 1972, 15, 247–251. [Google Scholar]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Geng, J.; Li, G.; Zeng, R.; Wen, Q.; Jiang, E. A Comprehensive Assessment of Raw Multi-GNSS Measurements from Mainstream Portable Smart Devices. In Proceedings of the ION GNSS+ 2018, Institute of Navigation, Miami, FL, USA, 24–28 September 2018; pp. 392–412. [Google Scholar]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of Dual Frequency GNSS Observations from a Xiaomi Mi 8 Android Smartphone and Positioning Performance Analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef]
- World’s First Dual-Frequency GNSS Smartphone Hits the Market. Available online: https://www.gsa.europa.eu/newsroom/news/world-s-first-dual-frequency-gnss-smartphone-hits-market (accessed on 25 September 2018).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| East (m) | North (m) | Up (m) | |
|---|---|---|---|
| TT-SD Hatch filter solution | 0.357 | 0.447 | 0.840 |
| Chipset Solution | 1.257 | 2.300 | 2.488 |
| Traditional Hatch filter solution | 6.543 | 8.707 | 10.203 |
| RTKLIB SPP solution | 7.803 | 10.065 | 12.667 |
| 2D-RMS(m) | |
|---|---|
| TT-SD Hatch filter solution | 0.953 |
| Chipset solution | 2.644 |
| Traditional Hatch filter solution | 8.961 |
| RTKLIB SPP solution | 11.334 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, J.; Jiang, E.; Li, G.; Xin, S.; Wei, N. An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sens. 2019, 11, 1679. https://doi.org/10.3390/rs11141679
Geng J, Jiang E, Li G, Xin S, Wei N. An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sensing. 2019; 11(14):1679. https://doi.org/10.3390/rs11141679
Chicago/Turabian StyleGeng, Jianghui, Enming Jiang, Guangcai Li, Shaoming Xin, and Na Wei. 2019. "An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections" Remote Sensing 11, no. 14: 1679. https://doi.org/10.3390/rs11141679
APA StyleGeng, J., Jiang, E., Li, G., Xin, S., & Wei, N. (2019). An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sensing, 11(14), 1679. https://doi.org/10.3390/rs11141679