1. Introduction
Situated at the interface between marine and terrestrial environments, coastal zones are exposed to a combination of several morphological processes, as well as anthropogenic pressure. A better understanding of the mechanisms driving shoreline change is essential for improved coastal risks management. This involves suitable monitoring strategies, implying recurrent surveys, adapted to the environmental constraints (meteorological conditions, limited survey duration, etc.), and to the different types of coastal environments, and covering a range of spatial (from decimetre to kilometre) and temporal scales (from event to seasonal). Depending on the study area, a multi-source monitoring may be carried out, including different techniques, from wide-covering methods such as satellite imagery to point-wise measurements with GPS surveys [
1].
Differential Global Positioning System in Real Time Kinematic (RTK DGPS) mode or tachometer are the most common techniques for beach surveying [
2]. These point-wise methods are associated with high accuracy, but low spatial resolution. Easy-to-use, they can be suitable for recurrent long-term surveys [
3,
4], generally through the acquisition of cross-shore profiles. However, they can be very time-consuming and involve a great human effort for large areas. Besides, they are not suitable to survey cliff fronts.
During the last decades, various high-resolution remote sensing techniques have proved their potential for coastal monitoring, allowing data spatialization. Coastal video monitoring provides high-frequency, continuous and autonomous observations [
5,
6,
7,
8]. Yet, such systems require an infrastructure (pole or building for implementation, power supply, etc.) and the feasibility is therefore very dependent on the study site configuration and anthropization. Furthermore, the wide-angle field of view results in large spatial heterogeneity in data quality [
6].
Terrestrial Laser Scanner (TLS) is an optical active remote sensing technology. Most TLSs use the time-of-flight of the laser pulses reflected by the environment to measure point positions. Providing dense point clouds with centimetric accuracy, TLS are commonly used for coastal monitoring [
9,
10,
11].
Owing to technological progress and decreasing cost of Unmanned Aerial Vehicles (UAVs), as well as recent development of the Structure-from-Motion (SfM) approach in photogrammetry, the potential of UAV photogrammetry for coastal surveys has been demonstrated for several years [
12,
13,
14,
15]. UAVs enable the rapid acquisition of high-resolution (<5 cm) topographic data at low cost.
By providing different points of view (terrestrial or aerial), TLS and UAV can be used in combination [
16,
17,
18]. Nevertheless, these methods require favorable weather conditions (low wind, no rain) and experienced operators, which may prevent measurements during periods, such as spring tides or post-storm events, during which important morphological changes can occur.
To avoid these drawbacks, terrestrial photogrammetry [
17,
19] appears as a very flexible monitoring technique given adequate view point of the study area. By making in situ surveys easier, this approach is more likely to be used on different study sites by different operators in parallel.
With miniature cameras inside smartphones becoming more and more efficient, smartphones also appear as a new opportunity of a mainstream, low-cost sensor, which can be particularly useful for participatory science programs or citizen observatories. Smartphone photographs have already been used in sciences for coastal applications, such as the CoastSnap beach monitoring initiative, which gathers crowd-sourced photographs at some iconic beaches for shoreline detection [
20]. Al-Hamad and El-Sheimy [
21] tested smartphones as mobile mapping systems, using exterior orientation parameters computed by photogrammetry to improve position and orientation measurements. However, we note that few studies make use of smartphones for stereo-photogrammetric applications. Kim et al. [
22] tested the feasibility of using a single smartphone as the payload of a photogrammetric UAV-system. This use appears problematical in dynamic mode. Micheletti et al. [
23] successfully performed SfM-photogrammetry restitution of river banks from terrestrial smartphone surveys. They achieved centimeter-precision terrain reconstructions at close-range (10 m or less). Prosdocimi et al. [
24] obtained a Digital Elevation Model (DEM) from an 8 mega-pixel
iPhone5® camera, with a resolution of 0.1 m and a Root Mean Square (RMS) error of 5.7 cm. They suggested that this approach can be an alternative low-cost methodology to analyze bank erosion in agricultural drainage networks. Ozturk et al. [
25] used smartphone SfM-photogrammetry for structural geology applications, extracting Ground Control Points (GCP) from previously existing data and achieving decimetric accuracy.
This study proposes to use terrestrial SfM photogrammetry from smartphone photographs for coastal monitoring. From a geometric point of view, it appears easier to reconstruct vertical objects compared to horizontal objects using terrestrial close-range SfM photogrammetry. Firstly, we test the method to survey a portion of a coastal cliff face. Secondly, we assess the potential of the method to reconstruct beach morphology. During the tests, we evaluated three smartphone models and different acquisition protocols in terms of their efficiency.
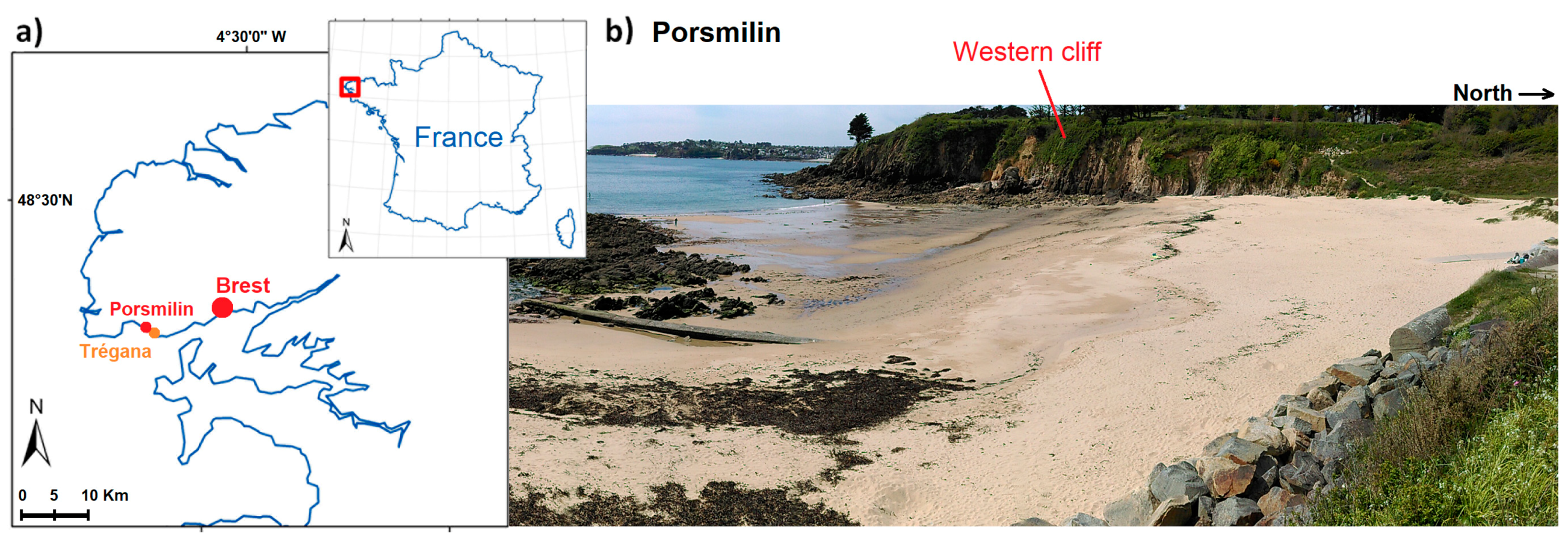
2. Study Area
The study site is Porsmilin Beach, located at the entrance of the Bay of Brest in Brittany, France (
Figure 1). The beach is slightly-anthropized, the only infrastructures being a car park (at the north-east, around 3 m above the beach), a jetty and a concrete pipe on the east. The beach stretches over 170 m alongshore and, at low-tide, it uncovers for over 200 m cross-shore. Eastward and westward, it is surrounded by orthogneiss cliffs of about 15 m in height. The beach is backed to the north by a brackish-water marsh that no longer communicates with the sea. The back-beach dune is between 1 m high to 1.8 m high. The average beach slope extracted from cross-shore profiles is around 3°, with higher profile variability between 25 m and 70 m. The environment is macrotidal, with a mean spring tidal range of 5.7 m, and subject to mean annual wave height around 1 m and storm waves over 2 m.
This site has been chosen for the tests because it is monitored in the framework of the national DYNALIT (Littoral and Coastline Dynamics) observatory [
14]. In this context, a TLS survey was carried out simultaneously to the smartphone SfM photogrammetry survey. The 3D data resulting from this TLS survey, encompassing the beach and the cliff, are used as validation data.
3. Materials and Methods
3.1. Cameras
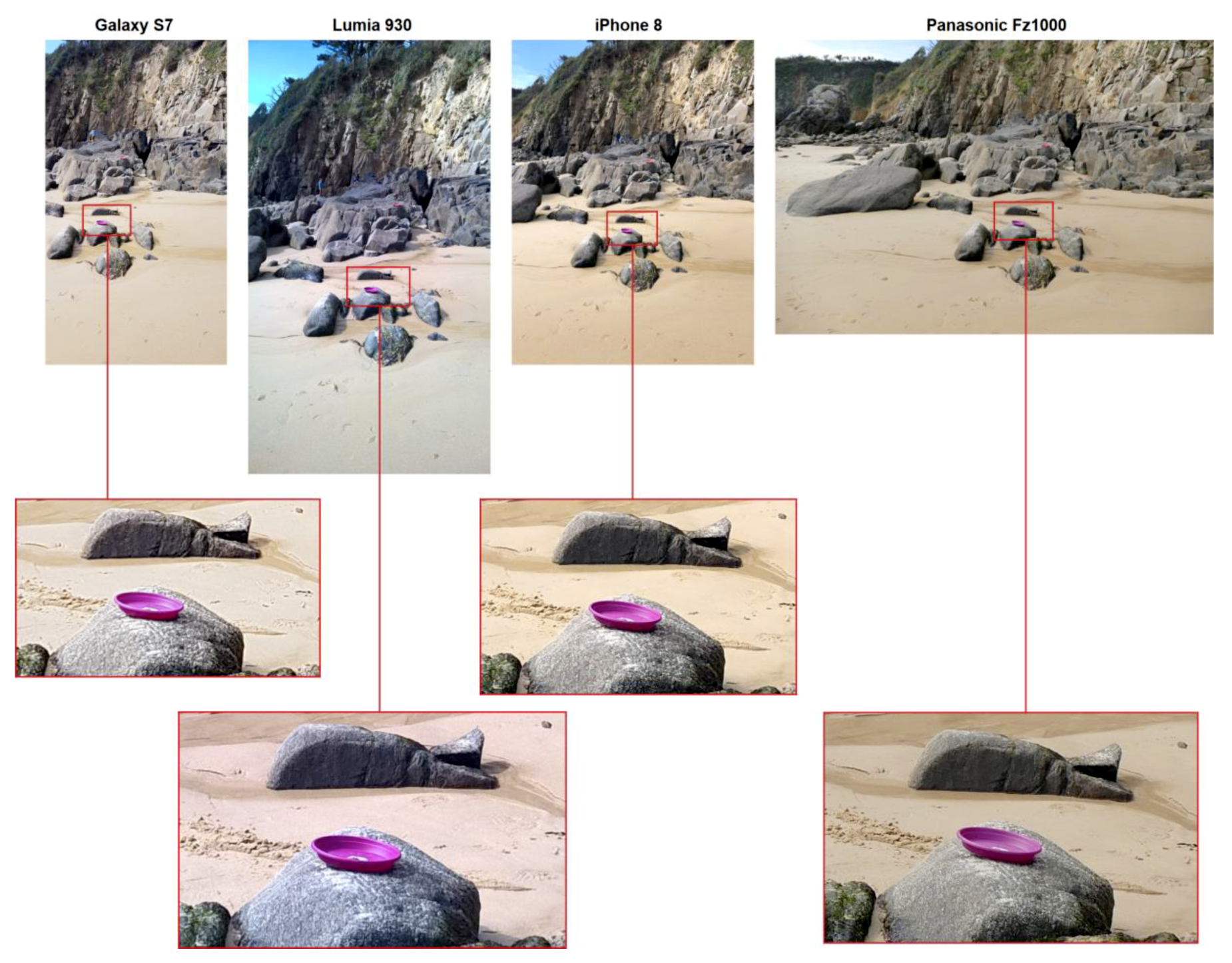
Compared to reflex or bridge cameras, smartphones are equipped with smaller-diameter lenses and smaller sensors with smaller photosites, which gather less light and offer a lower ISO range. In theory, this would be prejudicial to image quality, but smartphones compensate the small sensors by improved computational power. Furthermore, the focal length of smartphone cameras is very short, which generally is not recommended for photogrammetric applications, as in this case lens distortion modeling is more challenging. Nevertheless, smartphone cameras are fixed lenses and have now a reasonably high resolution (>5 Mpix), which are favored for SfM photogrammetry.
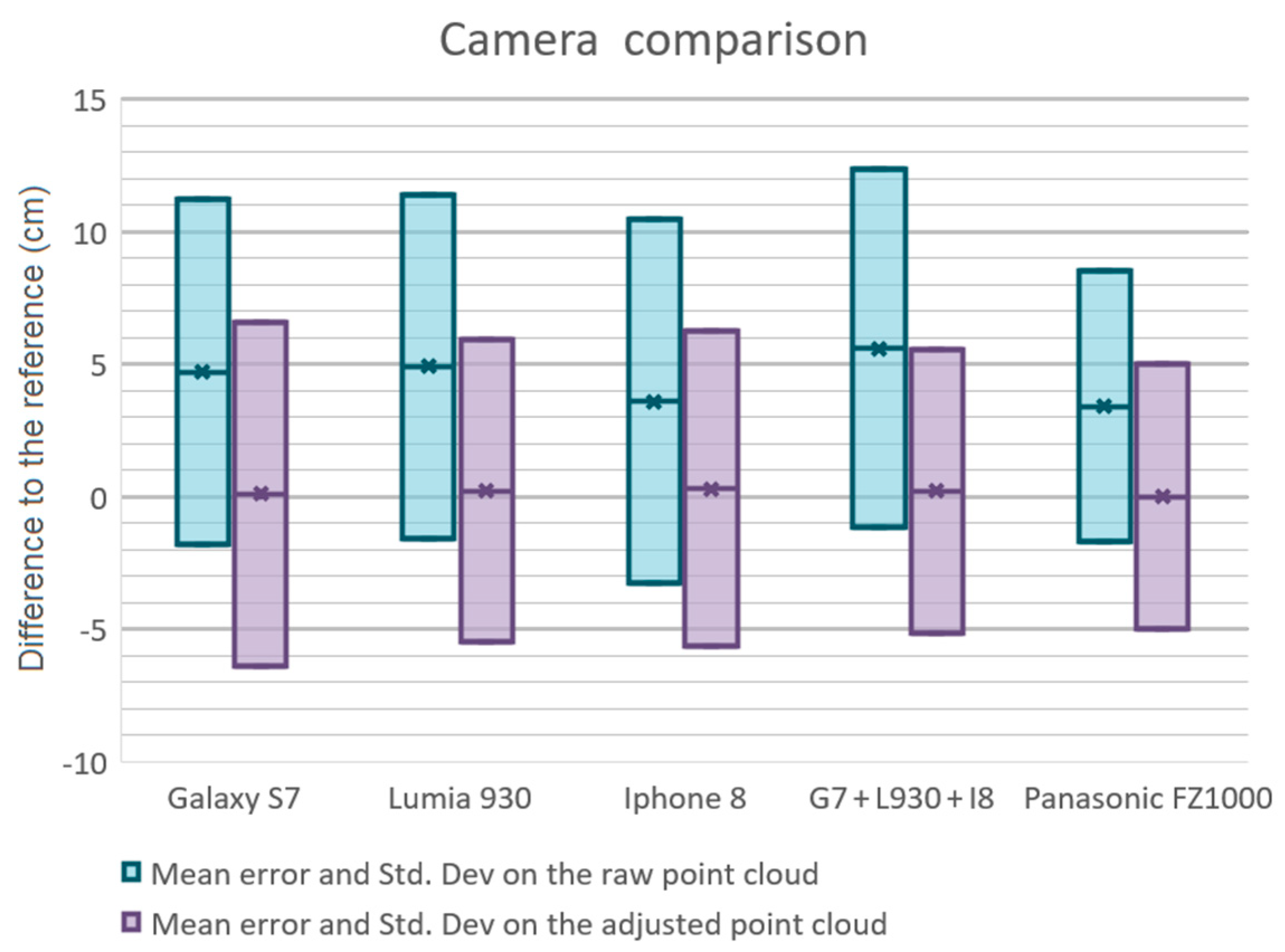
Three models of smartphones were tested to assess if the quality of the topographic reconstruction varies from one model to another or, in a participatory science prospect, if it is possible to combine photographs taken by different smartphones in the reconstruction process. The models used in this study are the
Samsung® Galaxy S7, the
Nokia® Lumia 930 and the
Apple® iPhone 8. Their main properties (given by manufacturers) are summarized in
Table 1. In parallel, a
Panasonic® FZ1000, a top-end bridge camera (
Table 1) is also tested to compare smartphone reconstructions to the results obtained with a more “classical” camera for terrestrial photogrammetry. An example of photographs collected by the different cameras is presented in
Figure 2.
3.2. SfM Photogrammetry Processing
In the last decades, the development of Structure-from-Motion (SfM) photogrammetry has contributed to make the acquisition procedure considerably easier. Indeed, SfM photogrammetry induces: (i) more flexibility in photographs collection, (ii) more flexibility in the choice of the cameras, (iii) camera pre-calibration is no longer necessary, and (iv) photos collected from various cameras can be mixed in the same dataset.
The datasets are processed using Agisoft® PhotoScan Pro (v. 1.2.6), a commercial SfM and image matching software. The algorithm for surface reconstruction is divided into three main steps:
Image orientation by bundle adjustment (detection and matching of homologous keypoints on overlapping photographs in order to compute the external parameters for each camera).
Refinement of camera calibration parameters (internal parameters) including Ground Control Points (GCPs) positions. GCPs, consisting of highly visible targets, are manually pointed on the images, their ground positions being measured by RTK DGPS. These GCPs are used to improve camera auto-calibration and to georeference the dataset. In PhotoScan, the lens distortion is modelled using Brown’s distortion model.
Dense image matching to produce a dense point cloud using the estimated external and internal camera parameters.
For this study, the same operator processed all the datasets. The photographs were not pre-selected but some of them were automatically discarded during the processing. As far as possible, the same parameters were kept from one processing to another. Masks were applied on the sky and on the sea to avoid false tie point detection on these areas. The dense point cloud can be rasterized on a regular grid to produce a DEM and an orthophotograph. However, for sub-vertical objects, here the cliff measurements, the raw dense point cloud was used.
3.3. Positioning and Validation Data
3.3.1. RTK DGPS Measurements
Taking advantage of an existing geodetic marker on the study site to set up our GPS base station, RTK DGPS is simple to implement, achieving centimetric positioning accuracy. The device used for this study is a Topcon® HiPer V GNSS receiver.
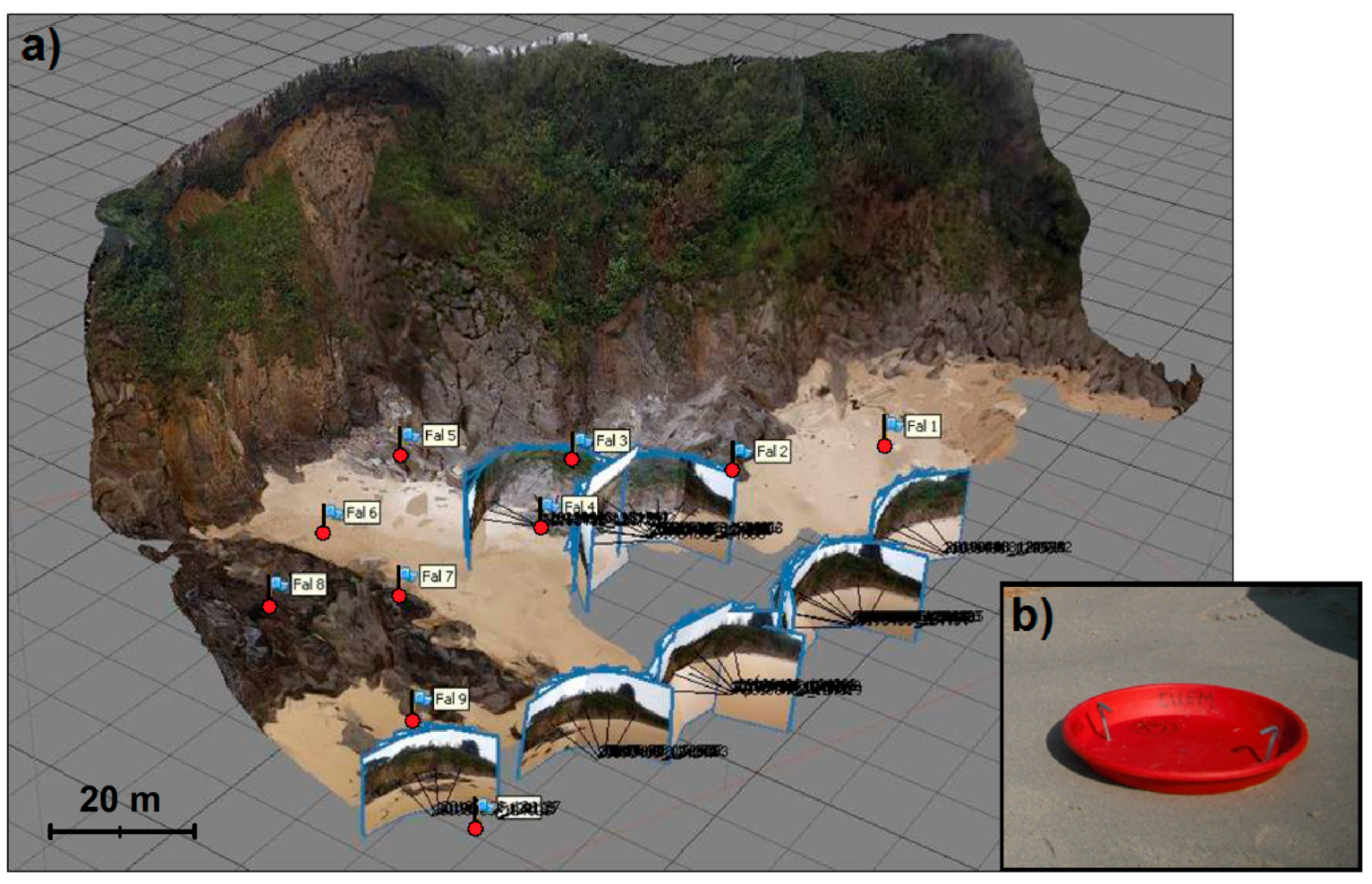
For the TLS survey, RTK DGPS was used to measure the position of reflective targets distributed around the TLS standpoint before the survey. These targets are cylinders 10 cm in diameter and 10 cm in height. For the SfM-photogrammetric survey, we used the RTK DGPS to measure the position of the GCPs, which in this case are red or purple circular targets 30 cm in diameter.
3.3.2. TLS Data
As mentioned previously, Porsmilin beach is part of the DYNALIT long-term coastal observatory and is therefore regularly monitored. In this context, a TLS survey was performed simultaneously to the smartphone photogrammetric test. The TLS device was a Riegl® VZ-400. In the present study, the TLS survey involved two scans from two distinct scan positions, each covering 360° horizontally and 100° (from 30° to 130°) vertically with an angular resolution of 0.04° in both directions. With a range of up to 600 m, each point cloud has more than 20 million points.
Data processing was then performed using the RiScanPRO® software suite (provided by Riegl®). It comprised two main steps:
- (i)
Georeferencing and individual clouds assembly. An indirect georeferencing was performed [
9], using 21 reflective targets.
- (ii)
Manual point cloud filtering to remove artifacts or undesirable data (people on the beach, data outside of the study area, etc.)
Finally, meshes are generated separately on the beach and on the studied cliff face using
CloudCompare®, a 3D point cloud freeware processing software. We used a 2.5D Delaunay triangulated mesh for the beach and a Poisson 3D surface reconstruction for the cliff [
26].
This dataset is used as validation data to assess accuracy of the SfM photogrammetric point clouds. This assessment is performed using the “cloud-to-mesh distance” tool, computing nearest-neighbor distances in CloudCompare. Using a mesh for the TLS dataset avoids computational artifacts in quality assessment due to a heterogeneous point cloud density.
6. Discussion
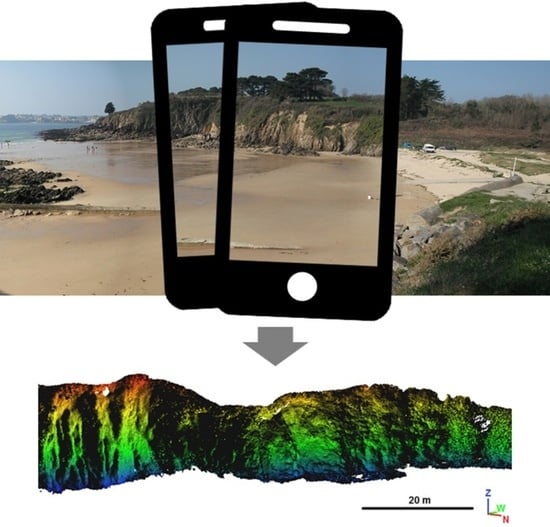
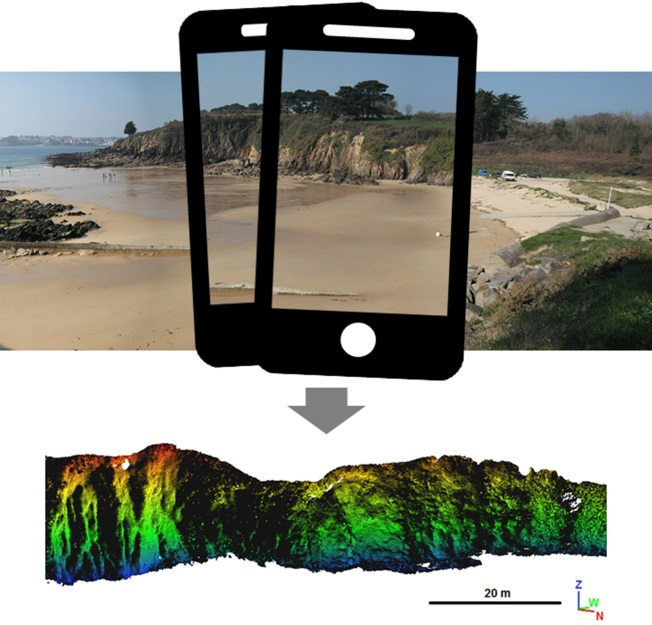
6.1. Cliff Reconstruction
Smartphone SfM photogrammetry has the potential to provide morphological surveys with the same order of quality (in resolution and accuracy) as TLS surveys or photogrammetric surveys using more “classical” cameras (here, a
Panasonic Fz1000 bridge camera). This type of terrestrial photogrammetric survey is quicker than a TLS survey (around 20 min against 45 min/scan position) and uses equipment that is less costly (~100 to 200 times cheaper than a TLS), less cumbersome, and more adaptable to weather conditions (particularly wind). We found that the reconstruction quality is not dependent on the smartphone model used and so on its focal length and resolution (as a reminder, the tested smartphones have at least 12 Mpix cameras). We can notice that for photogrammetric purposes, the
Lumia 930 provided similar results to the
Galaxy S7 and
iPhone 8, while it costs two or three times less. Furthermore, considering the order of magnitude of the errors and standard deviations, it is necessary to keep in mind that the TLS mesh used as reference is also affected by errors, for instance due to georeferencing, interpolation in occluded and low-density areas. These errors can vary (i) temporally, from one survey to another, depending for example on RTK DGPS accuracy; and (ii) spatially, depending on the laser angle of incidence, the presence of occluding elements and surface roughness [
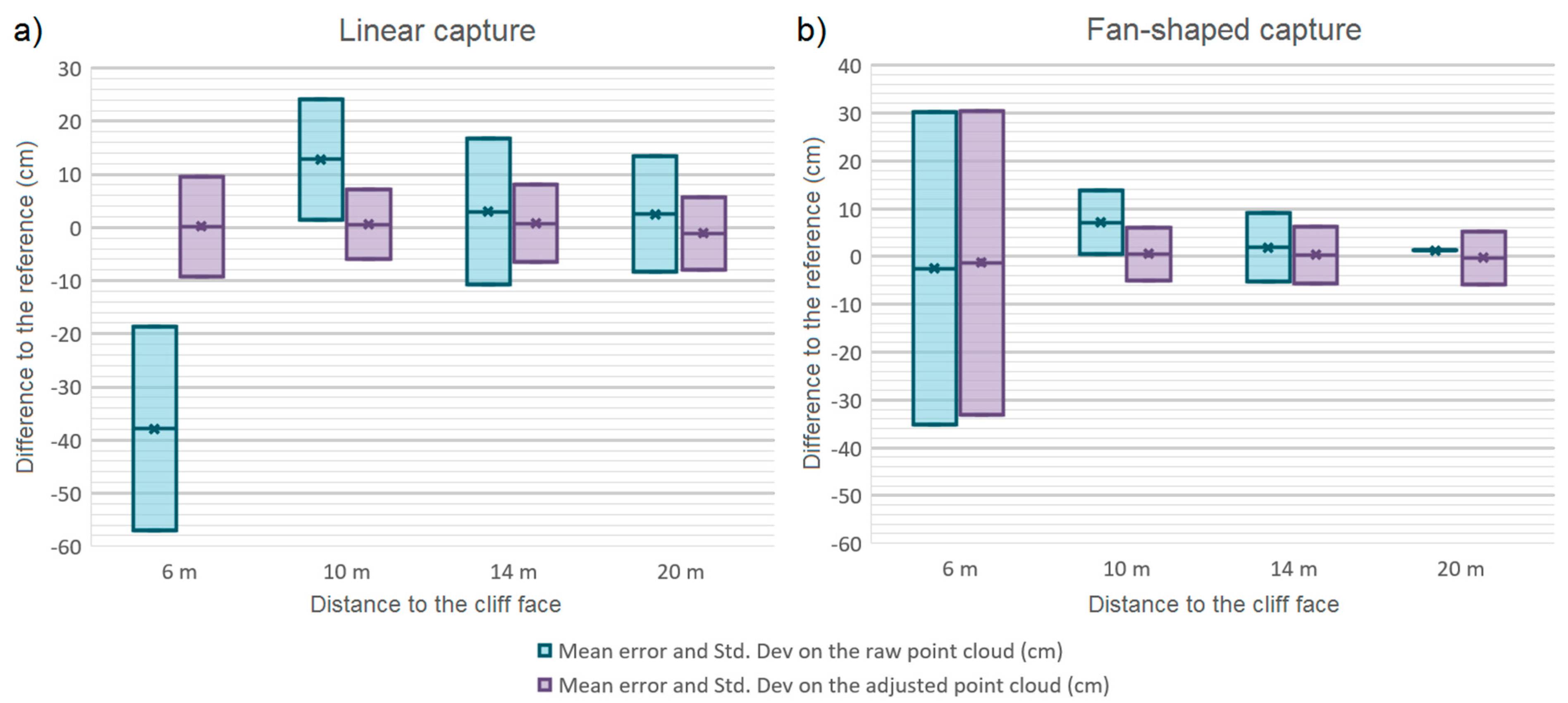
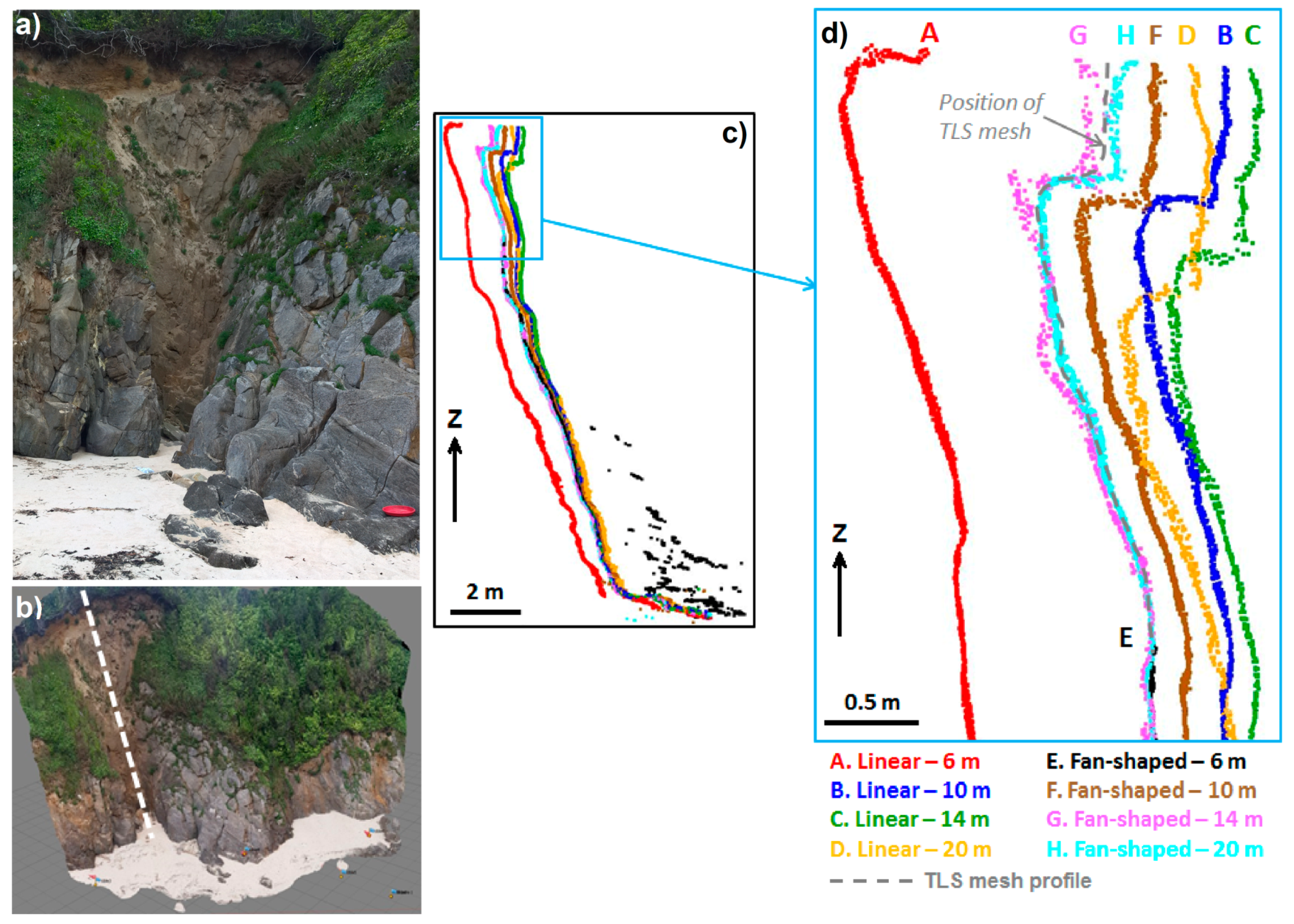
24]. At Porsmilin site, the errors in TLS data ranged from around 2 cm to 10 cm. It is therefore difficult to discriminate if the differences measured between smartphone SfM point clouds and the TLS mesh are due to the SfM point cloud, the TLS mesh or, more probably, a combination of both. The standard deviations between the SfM point cloud and the TLS mesh can consequently reflect differences in the reconstruction of complex geometries as found on a rocky cliff face. Some parts of the cliff are also vegetated with small bushes, which are challenging for remote sensing methods and can create differences depending on the survey method used and the geometry of data collection.
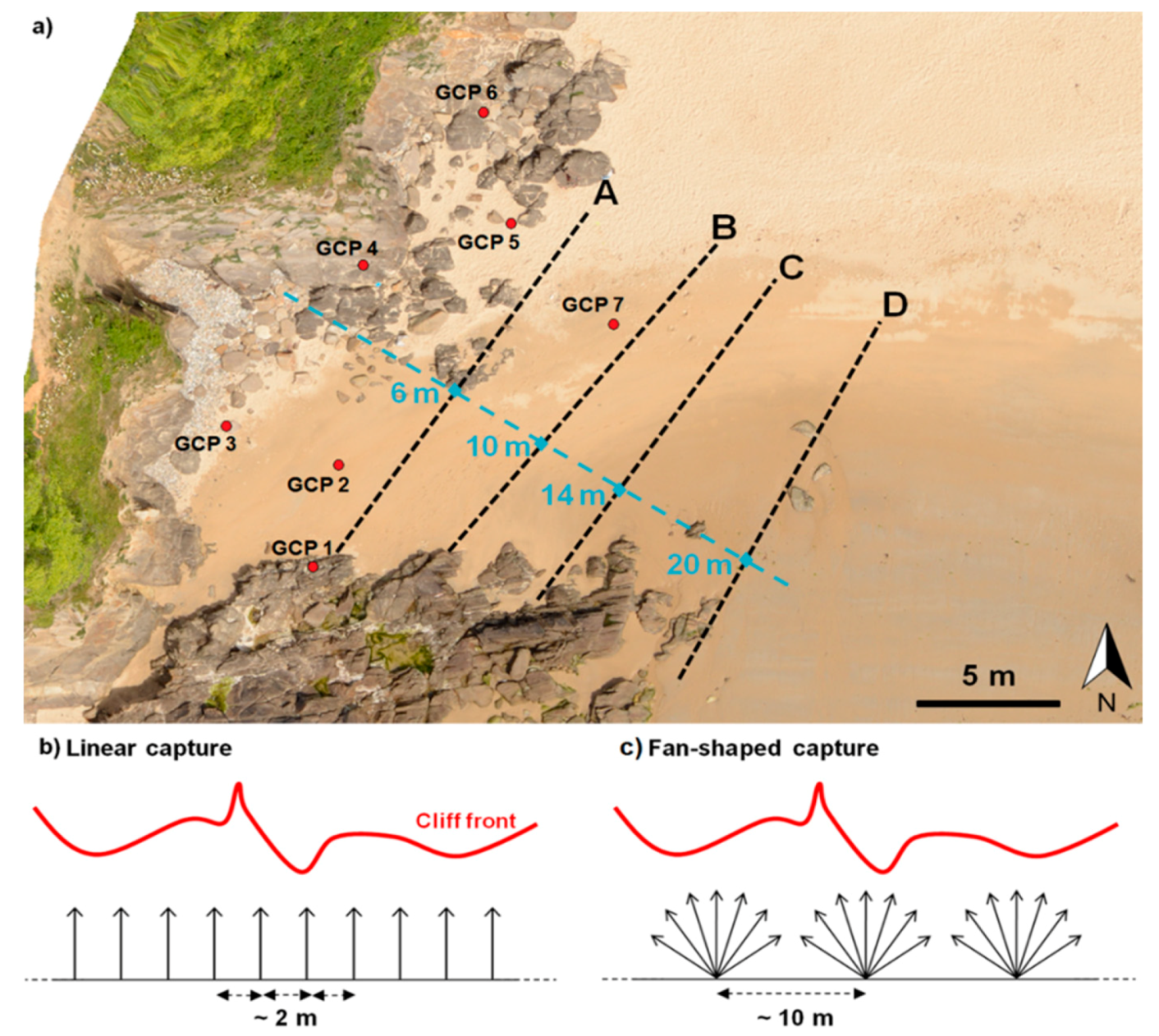
Comparison of the survey protocols shows that point cloud density and reconstruction quality (
Table 3 and
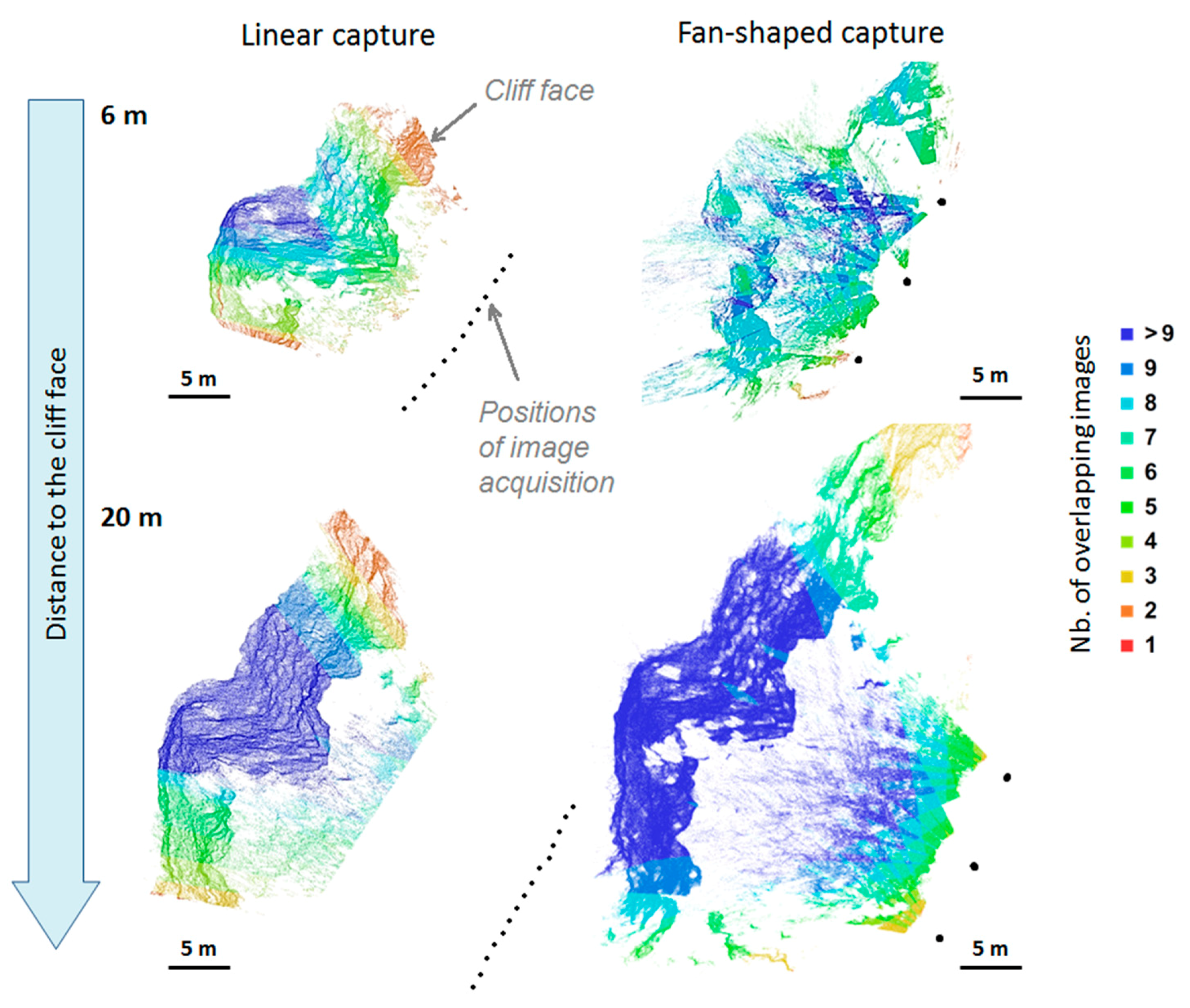
Figure 7) are closely linked to the configuration of image overlaps. As the distance to the cliff face increases, the image resolution decreases, which may impact tie point identification, but in parallel, the image footprint increases. This increase in image footprint means a larger coverage for the same survey duration (
Figure 10) and increased image overlaps, which are favorable to reduce geometrical ambiguities and to limit geometrical distortions. For fan-shaped capturing mode, and at short distances, the image overlap is more homogeneous than for linear capturing mode, but this overlap is low for the imaged area (
Figure 10). With increasing distances from the cliff face, fan-shaped capturing mode produces larger image overlaps due to the convergence of images from the different viewpoints. The operator should seek the appropriate distance from the cliff face, offering the optimum trade-off between image footprint (and image overlap) and image resolution. For cliff face reconstruction, fan-shaped capturing mode allows quicker in situ surveys and better results than linear capturing mode provided that the distance to the cliff face is sufficient to ensure a good image overlap.
To a certain extent, the quality of the topographic reconstruction depends on the surveyed environment, including but not limited to the distance to the area of interest, angle of incidence of the line of sight, surface roughness, surface reflectance, and feasibility of GCP deployment. Comparison of our results to the existing literature on smartphone photogrammetry is therefore limited to first order comparison. The quality of the reconstruction obtained on the cliff face is similar to the results obtained in other studies employing comparable methods. The most similar studies to cliff face monitoring concern river or channel banks. Micheletti et al. [
23] achieved a mean error of 2.07 cm surveying alpine river banks with
iPhone4® photographs at close-range (10 m or less) processed with
123D Catch®, while Prosdocimi et al. [
24] obtained a 10 cm gridded DEM of channel banks, with 5.7 cm of RMS error, using
iPhone5® photographs processed with
Agisoft Photoscan®.
6.2. Beach Reconstruction
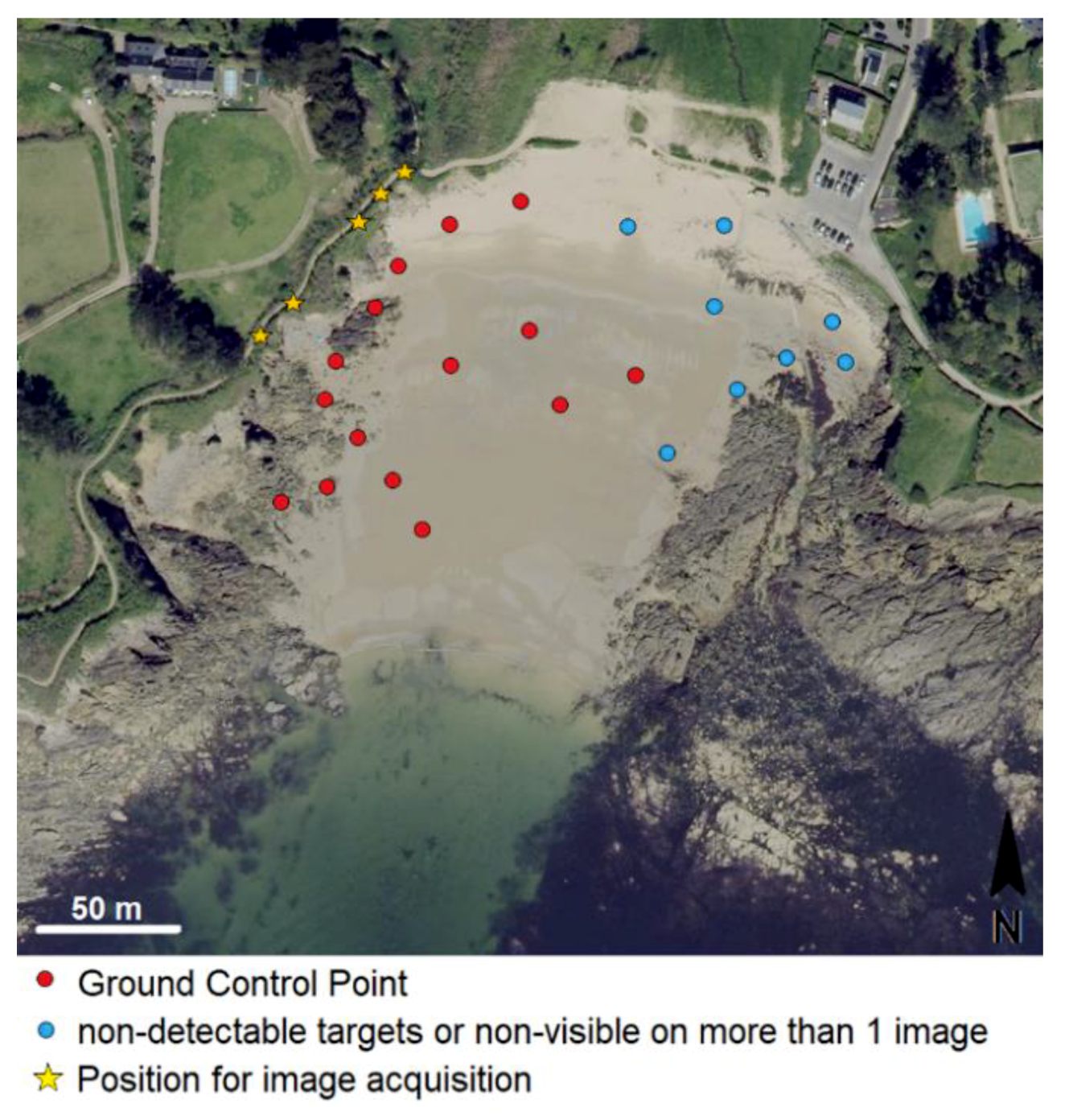
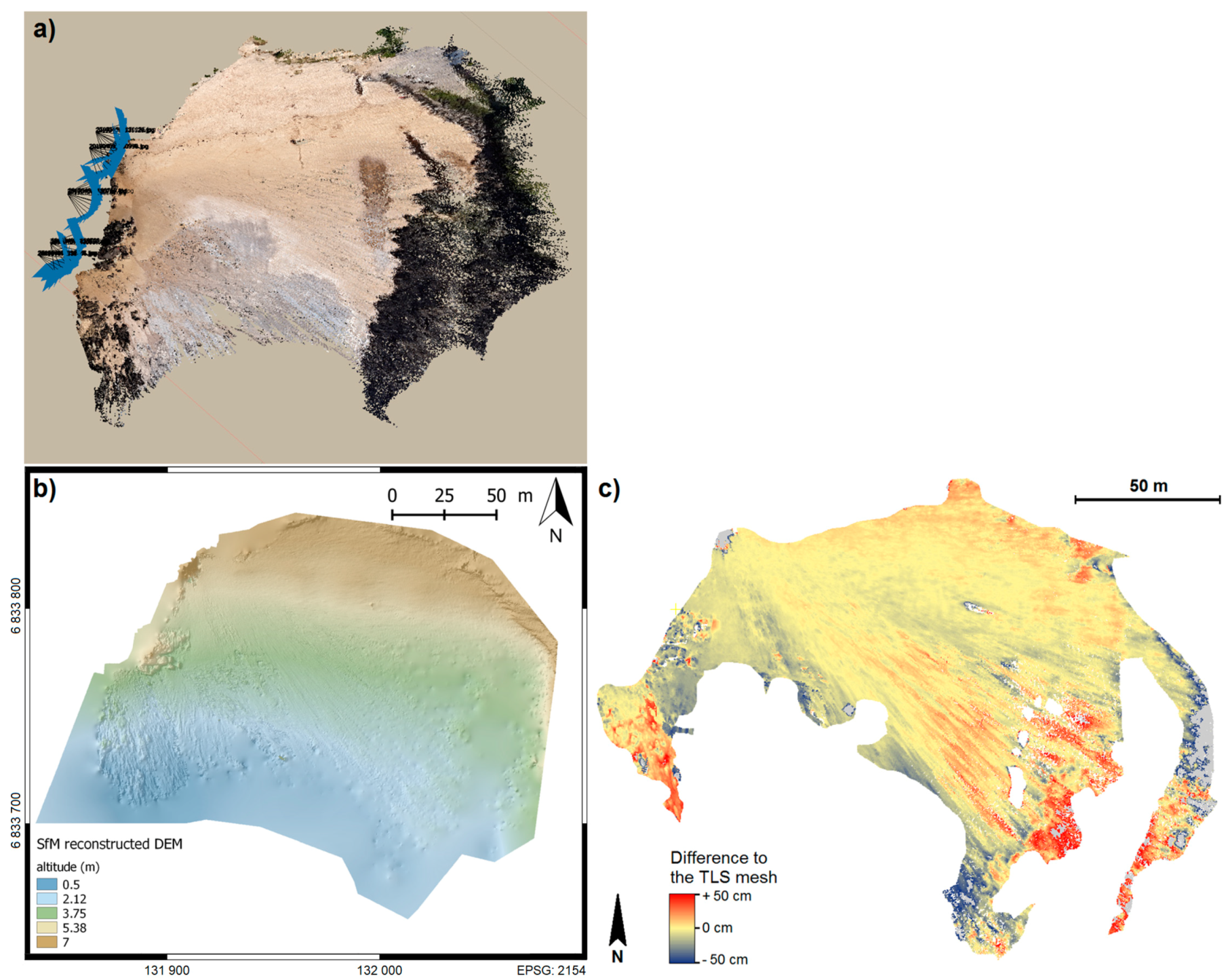
The use of smartphone SfM photogrammetry for beach reconstruction differs from previous studies. The main difficulty is to capture photographs with sufficiently high-angle shots from overlooking points of view. In Porsmilin, the only suitable positions for image acquisition were situated atop the western cliff, which implies that for distant parts of the study area, pixels are more distorted and GCPs are harder to detect (loss of resolution and increase in pixel deformation). As shown in
Figure 9c, measurement error is related to the geometry of acquisition, with error increasing along the lines of sight. The absence of GCPs combined with a tangential line of sight are conducive to geometric distortions. These distortions are probably the reason for errors on the perimeter of the study area. Furthermore, the method of error calculation (cloud-to-mesh distance in
CloudCompare) only computes Z (i.e., vertical) differences, even though the appearance of the SfM point cloud suggests that there are also some XY (i.e., horizontal) errors, particularly in the eastern part of the study area. Unfortunately, as the targets could not be detected in this area, the XY error is difficult to assess. Furthermore, we can hypothesize that, in the case of a beach survey with tangential lines of sight and a great depth of field, a linear capture mode would provide lower pixel deformation and skewness, and hence better tie point detection.
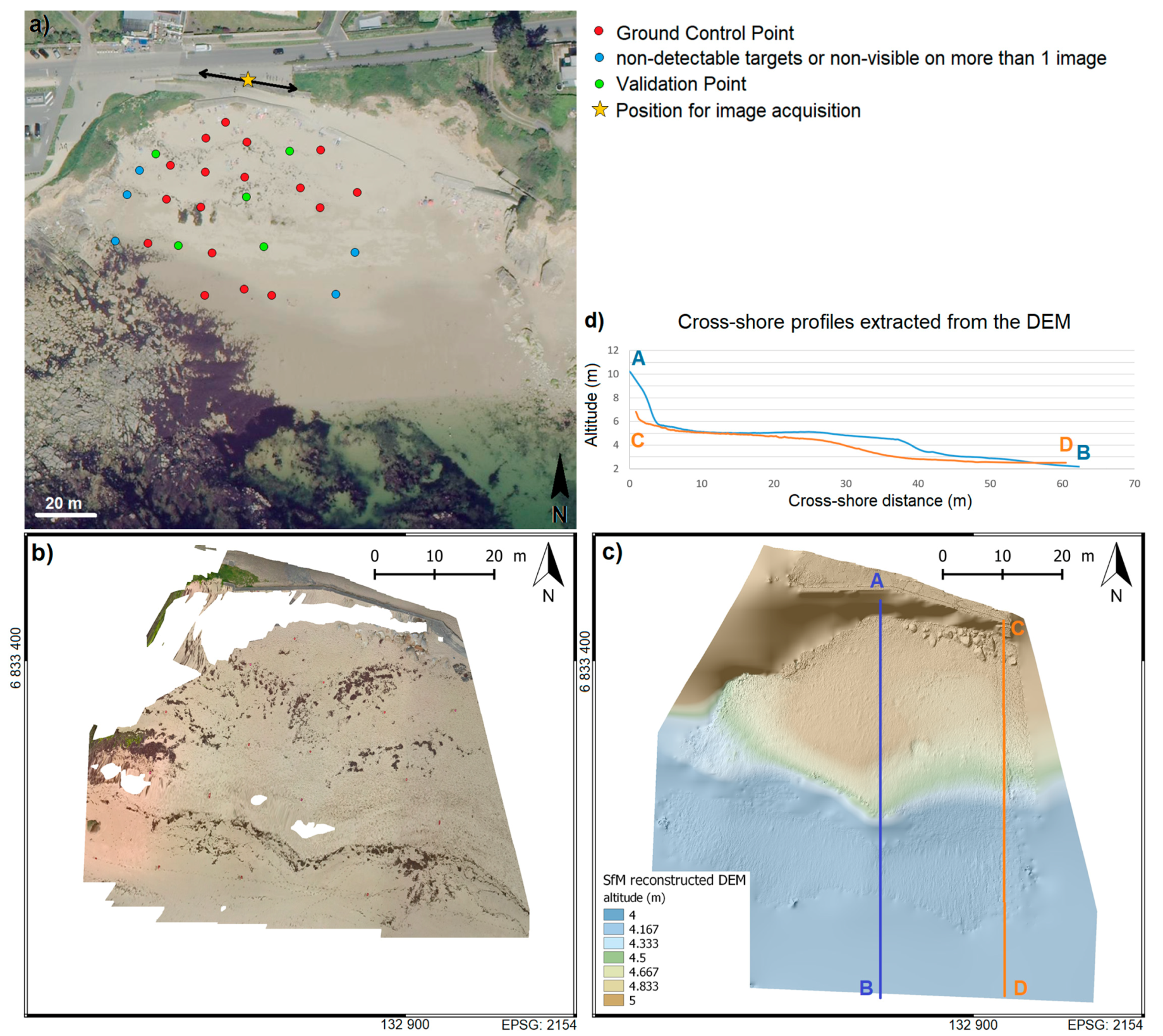
To complement this study and to confirm the importance of having as high-angle shots as possible to improve the quality of the reconstruction, beach survey was tested over another beach site, 1 km to the east, Trégana Beach (
Figure 1). This site was chosen as it presents a 30 m long esplanade, situated approximately 12 m above the beach, which offers easy-access favorable points of view for photograph acquisition (
Figure 11a). Thirty-five photographs were collected with a linear capture mode using the
Lumia 930. No TLS validation data are available for this site. Some targets were used as validation points. This method of error assessment is pointwise, and hence spatially limited; however, it enables to account for both horizontal and vertical errors. Seventeen GCPs and five validation points (
Figure 11a) were used. The computed DEM and orthophotograph (
Figure 11b,c) have spatial resolutions of 1.0 cm and 0.5 cm, respectively. The XYZ Root Mean Square (RMS) error for the five validation points is estimated to be 1.8 cm. As shown in
Figure 11c, the SfM reconstruction not only succeeded in reproducing first order topography, but also complex morphological features such as beach cusps and rocks on the upper beach face.
Smartphone SfM-photogrammetry for beach survey is thus dependent on the site configuration and on the point(s) of view overlooking the study area. As far as possible, it has to be performed with high-angle shots, and at low tide, to maximize the size of the study area and with illumination conditions minimizing sunglint.
6.3. Perspective for Participatory Science Projects
Citizen Observatories can be defined as community-based environmental monitoring and information systems, generally based on citizens’ own devices (e.g. smartphones, laptops, tablets) and social media. This approach aims to increase in situ observations and monitoring capabilities, allowing for example to increase measurement frequency and the number of study sites. Collecting smartphone photographs for SfM reconstruction would thus have a great potential in a participatory science projects.
Obtaining satisfactory results regardless of the smartphone model used and when mixing photographs from different smartphones is particularly promising if we aim to apply these methods in citizen observatories. Indeed, photographs collected by different people (potentially equipped with different devices) could be used in the same SfM reconstruction process. Future work will be dedicated to develop a mobile app and to test the concept among citizens.
Nevertheless, in such participatory monitoring frameworks, the RTK DGPS measurement of targets used as GCPs would be an issue. Coastal environments are highly dynamic, and to limit error propagation in sedimentary budgets a suitable monitoring strategy requires high resolution and high accuracy surveys. Consequently, using geotagged photographs only may not provide a sufficient accuracy. For cliff monitoring, the problem can be overcome by implementing fixed targets on the rock wall. On beaches, the problem persists, unless there are some unmoving visible rocks or boulders.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}